假手控制信号源研究进展
2017-04-12江都
江都
(冶金装备及其控制教育部重点实验室(武汉科技大学),湖北 武汉 430081)
杜峰
(机械传动与制造工程湖北省重点实验室(武汉科技大学),湖北 武汉 430081)
李嘉汉
(冶金装备及其控制教育部重点实验室(武汉科技大学),湖北 武汉 430081)
程文韬
(机械传动与制造工程湖北省重点实验室(武汉科技大学),湖北 武汉 430081)
假手控制信号源研究进展
江都
(冶金装备及其控制教育部重点实验室(武汉科技大学),湖北 武汉 430081)
杜峰
(机械传动与制造工程湖北省重点实验室(武汉科技大学),湖北 武汉 430081)

李嘉汉
(冶金装备及其控制教育部重点实验室(武汉科技大学),湖北 武汉 430081)
程文韬
(机械传动与制造工程湖北省重点实验室(武汉科技大学),湖北 武汉 430081)
人类的上肢系统功能复杂,感觉反馈极其丰富,如何确立假手的控制信号源是一个复杂的伴随着整个人类历史的难题。自控制论被提出以来,人们在假手控制方面投入了大量的研究,随着社会的进步与发展,生物医学领域以及军工业领域中的假肢以及各种机器人对控制信号源的要求越来越高,关于假手控制信号源的深层研究已成为目前及以后很长一段时间的热点研究方向。目前假手控制采用的控制信号源主要包括机械运动、声音、再造指、肌电信号、脑电、脑磁等。通过对近10年来国内外学者在假手控制方面研究的比较分析,介绍了假手控制的原理,对假手控制信号源的研究进展进行了综述,同时对这些假手控制信号源进行了对比分析,指出了假手控制信号源有待进一步研究的问题和发展趋势。
假手控制;信号源;控制原理;对比分析
近年来,智能假肢已取代装饰性假肢和索控型假肢,成为一个重要的发展方向,目前的重点研究方向主要集中在多自由度智能假手,这种多自由度最主要的特点在于其灵活性以及交互能力。随着社会的进步与发展,生物医学领域以及军工业领域中的假肢以及各种机器人对控制信号源的要求越来越高,假手控制信号源上的深层研究已成为目前及以后很长一段时间的热点。
人类的上肢系统功能复杂,感觉反馈极其丰富,如何确立假手的控制信号源是一个伴随着整个人类历史的难题。目前商用的假手基本上采用肌电信号作为控制信号源,这种以肌电信号作为控制信号源得到了广泛的应用。为了提高假手的仿生性和智能性,以实现更好的满足人类的需求,有必要在假手控制信号源上找到一个稳定的、不易受干扰的、检出信号准确的控制信号源。
市场上现有的假手功能简单、仿生性欠佳,不能满足肢残人在实际生活中的需求,智能化的研究是假肢研究中一直存在的问题。除此之外,假手研究的主要目标还有假手控制信号源的稳定性、准确性。人手是一个复杂的生物系统,普通假手要想达到相应的控制存在很多困难。因此,使假手像人手一样,快速、准确的做出反应动作,成为康复工程研究的一个前沿和热点。下面,笔者对假手控制信号源的研究进展进行综述。
1 假手控制
假手结构[1]的研究主要集中在多关节假手以及部分手截肢假手。假手的控制在一定的程度上决定了假手的实用性,其在临床医学、人机工效学、康复医学[2]、体育科学等领域均有重要的实用价值。
假手的控制过程主要是通过人眼的观察,然后到人体的反应,最后到假手的动作。核心的问题就是人体的反应到控制假手的动作的完成。下面以肌电假手[3]为例对假手控制做简单介绍。表面肌电信号(SEMG)[4]由与人体接触的表面电极[5]收集得到,其控制核心是检出的肌电位变化。整个控制过程就是通过人眼的观察,之后人体产生反应并产生肌电位[6]的变化,假手通过采集到的肌电信号做出相应动作。文献[7]选取了5个不同的手部动作,并相对应给出了4个表面电极的安放位置,得到的结论是:不同的动作模式对应着不同的功能肌肉(如图1所示)。

图1 针对5个手部动作的4个表面电极安放位置图
信号的处理决定了动作完成的准确程度,目的是有效提取出肌电信号中所蕴含的各种有用的信息,更好地应用于假肢控制。肌电信号[8]的功率被作为控制参数的缺陷在于其信息量未得到充分利用。肌电假肢控制的研究中代表性的方法有最优估计方法等[9]。
2 控制信号源
2.1 身体的机械运动作为信号源
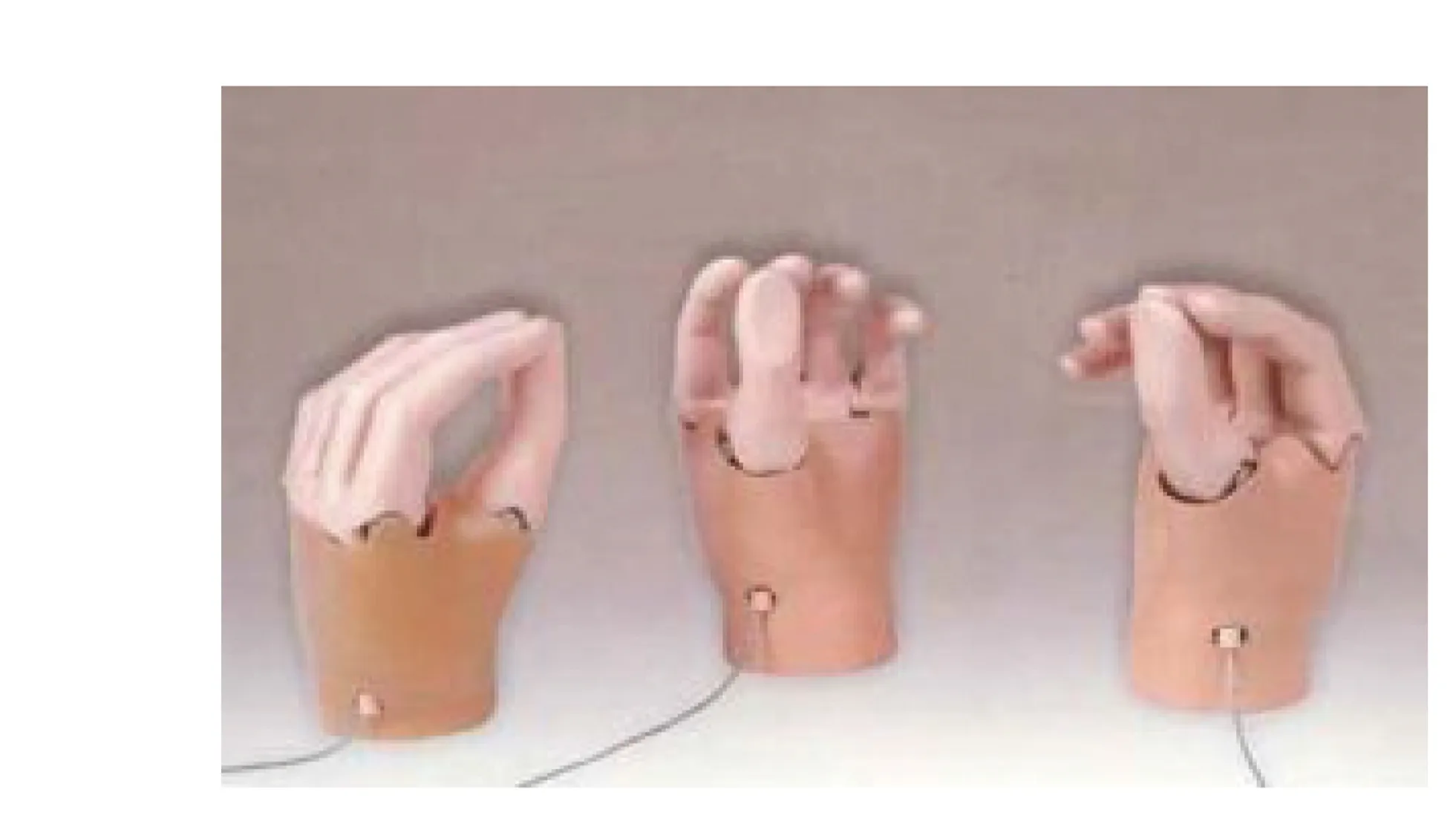
图2 索控型假手图
以身体的机械运动作为信号源的上肢假肢[10]的控制以患者残存的运动功能为基础,如残端肌肉的收缩与舒张、健康部位的扩张(如肩部的提动与内收)等,然后通过传动装置[11]实现对假手的控制。这种上肢假肢最主要的特点就是结构简单,成本低廉,可靠性及鲁棒性都较高,但是能达到的控制效果并不好,精确度不高,且能实现的控制任务简单,如喝水、吃饭、梳头等日常动作。图2所示是早期的一种索控型假手。在早期的研究中,如古濑则夫等利用神经网络[12]来确定对应的控制指令。此外,赵文汝等[13]将外科手术运用到假肢控制中,利用肌腱的感知运动驱动假肢的动作。
2.2 声音作为信号源
声控型假肢[14]的控制原理是以患者的声音信息为基础,经由数字处理技术(DSP)[15]的处理,实现假肢的控制。这种声控型假肢能有效地帮助残肢患者恢复运动方面的功能,其原理如图3所示。患者声带振动产生输入信号,微弱的声音信号经由电路放大以及滤波[16],然后经过比较器后生成数字信号,生成的数字信号经过编码器以及解码器[17]到执行机构,实现最后的控制。

图3 声控原理图
目前,声控技术[18,19]有了长足的发展。Walter R等[20]设计出了一种具有高控制准确率的声控轮椅模型。王从政等[21]提出了一种便携式的DSP系统,该系统的特点是多种控制指令为假肢的控制提供支持。上海理工大学的陈爽等[22]利用机械的四连杆机构设计了一种多姿态变换声控轮椅车,设计核心是采用语音模块化的思想,并将硬件的电路和软件的程序相结合,通过实验进行语音识别。
2.3 “再造指”作为信号源
“再造指”的原理是通过解剖学及美学原理在残疾患者的残端再造出形态逼真、功能良好的指,通过再造出的指达到更好的控制。前期通过手术再造出“指”,“再造指”存活后,还需要进行系统的康复训练,训练之后再利用物理的方法实现控制信息与操作指令的转化。
“再造指”的控制在一定程度上能有效地提高电子假肢控制的准确性。为了提高肌电控制[23]的准确性,王森章、胡天培和陈中伟[24]应用康复工程领域的方法,采取再造一个“指”的方式,作为一种新的控制信息源,其方法是对再造“手指”进行康复训练,通过接收以物理学方法为基础的控制信息,达到对电子假手[25]控制的目的。上海第二医科大学的王炜等[26]通过结合美学雕塑和早期功能训练进行的足趾移植手术,成功地达到使再造指形态逼真、功能良好的目的。
就目前的研究而言,“再造指”的控制思想有效地结合了医学与工程学。黄海东等[27]提出了指腹梭形皮瓣转移整形再造指的方法,并成功进行了7例(9指)再造指临床手术,这种方法能有效地改善再造指的外形。巨积辉等[28]利用趾动脉终末支岛状皮瓣重塑的方法,同时将其应用于17例(19指)的再造指手术中,成功地消除了由手术部位导致的外形的缺陷。之后巨积辉等[29]又将压力治疗与趾动脉终末支岛状皮瓣重塑相结合,使得临床治疗的效果更好。
2.4 肌电信号作为信号源
肌电控制假手是利用肌电作为控制信号的新型动力假手,是一种典型的“人——机系统”,其控制原理如图4所示。患者大脑产生运动指令,经由脊髓、运动神经的传导到肌肉产生信号。放置的肌电电极采集肌肉信号,后引入放大电路并经过放大滤波和整流,最后经过编码器和解码器到执行机构产生运动。

图4 肌电控制原理图
肌电信号[30]的研究起源于18世纪:1791年,Galvani 证实了肌肉收缩与电变化有关;Dubios Reymond于1849年在实验中首次发现了肌肉收缩[31]会产生电信号;1922年,Gasser与Newcomer获得诺贝尔奖的成果是成功显示了肌肉活动[32]时的电变化。随着科学的进步与发展,肌电信号的研究被广泛的应用到康复医疗、运动医学、临床诊断等多个领域[33,34]。1965年,德国的Otto Bock公司成功将假肢手[35]推向商业化。在这之后,表面肌电信号[36]有了更为细致的研究。1986年,加拿大New Brunswick大学的P.Parker和R.Scott首次进行了电动假肢的实验,英国的David C和David G[37]在2007年研发出有重要创新意义的仿生手 i-Limb(图5),哈尔滨工业大学机器人研究所成功研制了 4 代 HIT假手[38](图6)。此后具有自锁和自适应功能的KNU机械手[39]被韩国庆北国立大学学者成功设计出来,这种机械手的特点是手指节点安装有弹性元件[40]。

图5 i-Limb假手 图6 4代HIT假手
近年来,随着研究的深入,在肌电信号的分析上引入了数学的方法。分析主要集中在时域和频域2个方面。
(1)
均方根值(RMS)计算方法为:
(2)
积分肌电值、均方根值集中反映肌电信号的振幅变化特征。
在频域分析方面,技术指标主要是平均功率频率(MeanPowerFrequency)和中位频率(MedianFrequency)。
平均功率频率(MPF)计算方法为:
(3)
中位频率(MF)由式(4)得到:
(4)
研究发现中位频率的频谱特征变化要优于平均功率频率,但同时,在具体研究中,人们发现平均功率频率对肌肉活动和功能的状态反映要优于中位频率。
2.5 脑电作为信号源
标准化活动主要是编制、发布和应用标准和其他标准化文件的过程,标准化文件是标准化活动的产物。以国家标准制修订活动为例,其活动包括预研、立项、起草、征求意见、审查、批准、出版、复审和废止等九个阶段内容。
脑电[41]的本质是一种电噪声,理论上的思路是将脑电信号(Electroencephalogram,EEG)[42]进行转化,继而与外界进行信息交换与控制,最终达到控制假肢的目的。
长期以来,脑电基本只应用于临床的一些研究,随着后期信号采集处理技术的发展,在康复领域中逐渐开始引入了脑电信号。国外的一些研究者的研究主要集中在脑电信号的人际接口技术,实验建立了脑机直接接口(Brain-ComputerInterface,BCI)。而在假肢控制研究中,最根本的问题是脑电信号调理电路,这个问题同时也是研究的重点,这个问题的产生取决于人体脑电信号的特殊性。就目前的研究而言,脑电信号的放大和采集仍然是一个研究的热点。
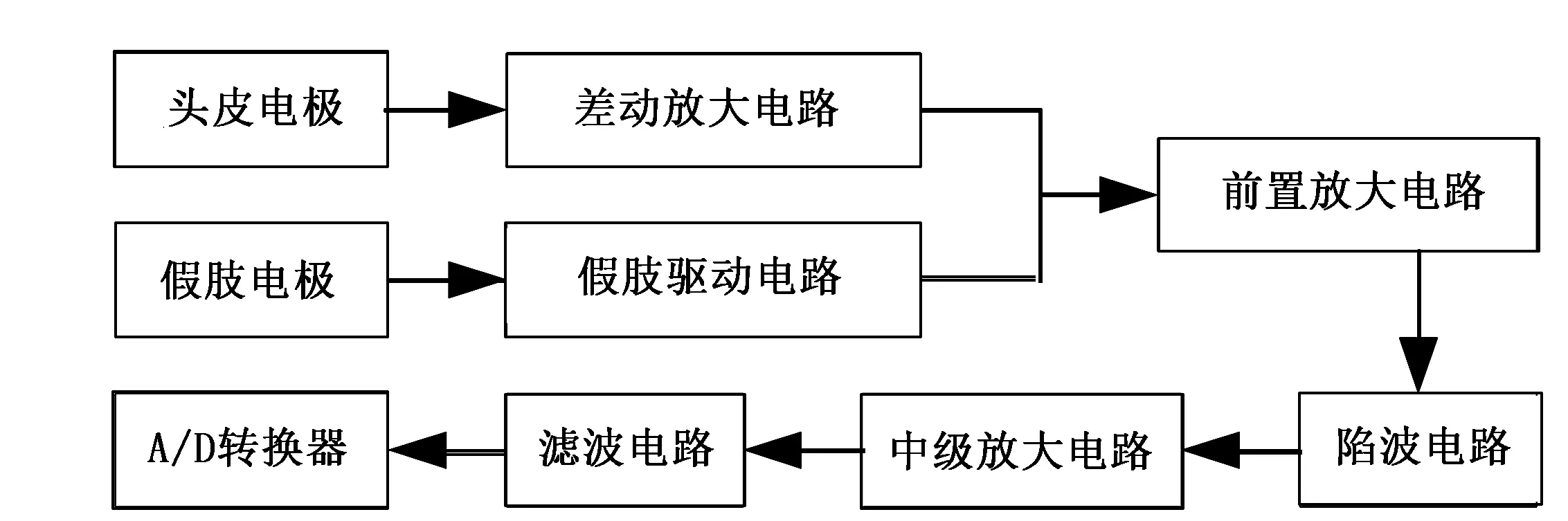
图7 脑电信号采集结构图
图7是一个脑电信号(EEG)采集电路图,该电路的前置放大器采用的是高精密仪表放大器,脑电信号经过前置放大电路放大后进行陷波和滤波处理,最后进入计算机系统。
脑电信号得到了越来越多的应用,很多学者在这方面进行了大量的研究:Pfurtscheller等[43]设计了一种能够根据使用者的想象的运动来分析识别手指运动的脑机接口装置(BCIs)[44];Roberts等[45]提出了一种快速性与精确性更高的BCIs接口系统,检测到的EEG信号通过一个AR模型[46]和贝叶斯逻辑分类器[47]对所接受的数据进行分类;大连理工大学的朱林剑等[48]设计了一只三自由度的假手;清华大学的程明、高上凯等[49]设计出基于稳态视觉诱发电位的光标控制系统,通过方块的控制来控制光标的移动。
脑电信号的提取与分析的研究方法主要以小波变换为基础。信号f(t)的小波变换定义为:
(5)
特征提取方法是以小波系数的均值、能量均值、方差等作为特征向量,将提取到的脑电信号进行小波分解。在脑电信号的采集与分析方面,学者做了很多研究:王鹏等[50]设计了基于DSP的便携式脑电信号采集系统,将脑电信号感应至预处理电路,经由模拟信号数字化,再由数字滤波,利用最小均方算法和独立成分分析分别滤除工频干扰和生理伪迹;张小栋等[41]提出了一种新的基于表情驱动脑电信号的脑机接口方式,利用神经元集群模型对表情驱动脑电信号进行机理建模与仿真分析,得到了最终的频率分布特性;段锁林等[51]提出了一种基于小波包特定频段的小波包方差、小波包熵和共同空间模式相结合的脑电信号特征提取的方法。
2.6 脑磁作为信号源
脑磁的产生来源于肌肉与神经体内的电流作用。1963年,Baule和McFee共同实验完成了生物磁的第1次实验测量,同时第1次记录了心磁。WilliamsonS等在无磁屏蔽的条件下,测量出了脑磁信号,进而促进了生物学的发展[52]。在脑磁信号的特征提取研究方面,李广勇等[53]结合了一种小波包分解和共空间模式,具体就是先利用小波包分解法进行分解,再用共空间模式算法进行特征提取,利用这种方法提取的脑磁信号特征较为明显。张学军等[54]提出了一种基于多维复杂度的脑磁信号分类方法,首先进行信号提取,之后采用遗传算法、BP神经网络以及SVM分类器检测特征子集的性能,最后对信号进行分类。该方法有效地提高了特征数据分类的正确率。在脑磁信号的特征分析方面,王干等[55]提出了一种频带划分方法和多种跨频耦合的度量方法相结合的方法,对脑磁信号跨频耦合特征进行了分析,通过这种统计分析达到区分不同手腕运动的MEG信号的目的。
为了将脑磁信号作为信号源并运用到假肢上,首先要面对的问题是构造人机接口。王健锋等[56]为了通过BCI处理非线性、非稳定性信号问题,提出了一种基于EMD和Hilbert变换的MEG特征提取、分类方法,并利用该方法有效地提高了分类的准确率,这一结果在实验中得到了验证。但是具体到假肢控制的应用,目前还处于起步阶段,主要是因为脑磁信号的复杂性,对脑磁信号的研究还停留在外科手术方面。
3 研究展望
1)以机械运动作为信号源的假肢控制结构简单,造价低廉,受到一部分患者的欢迎,但其缺陷就在于所能实现的控制任务非常简单,且反应迟钝,灵活性差。
2)声控型假肢是设计简单语言指令假肢控制系统,随着计算机技术的发展,还可以对系统进行编程以完成更多的功能,其控制方便,精度高。不足之处在于抗干扰能力弱,基于此,提高抗干扰能力是现在乃至以后的一个急需解决的问题。
3)“再造指”技术是一个医学上的创新,有很重要的现实意义,其在假肢上的应用为相关研究提供了一个新的途径。目前存在的问题主要是手术的痛苦以及术后所需的康复期较长,更多的研究主要集中在解决手术以及康复的问题上。
4)尽管肌电假手在实际应用中因肌电信号能够反映人的肢体运动信息而获得了巨大的成功,但存在控制信息不足的问题。此外,肌肉的疲劳程度、电极的位置、肌电信号的训练程度等都会影响肌电信号的控制准确度。假肢的自由度是未来的一个研究热点。
5)以脑电EEG作为信息源接收的是头皮记录的脑电活动,其主要特点是外在因素不会对记录过程产生影响。然而基于脑电活动的复杂性,在相关方面的研究非常有限,在脑电控制系统的研究方面有很长的路要走。
6)脑磁控制的关键核心是人机接口的构造问题。就目前情况说来,人们对它的认识处在一个初始阶段,研究主要集中在脑科手术方面,在假肢控制方面处在探索阶段。
目前假肢控制应用得最多的是肌电信号,肌电信号相对机械运动信号源灵活性更高,所能实现的控制更复杂。以肌电信号、声音作为信号源与其他几类相比不需承担手术的风险,但抗干扰能力相对较弱。以脑电、脑磁作为信号源都涉及到神经系统,神经信号被认为是一种最理想的控制源,神经信息相互独立,清晰度高。神经信息的这些特征体现出其在控制信号源的高度的优越性,因此,以神经信息为信号源的研究将是人类的一个重点攻克的难关,并成为将来的一个研究热点。
4 结语
介绍了假手控制的原理及其控制信号源,对国内外假手控制信号源的研究进展进行了综述。以机械运动作为信号源是以患者残存的运动功能为基础;声控型假肢的控制关键因素是声音信息,通过数字处理技术(DSP)的处理转化为相应的控制指令;“再造指”作为信号源更多是一种医学上的手术结果,通过“再造指”传递人脑运动信息;肌电假肢控制核心是检出的肌电位变化;以脑电、脑磁作为信号源的假肢本质上是以神经信息作为控制信息。目前大多数的假肢都是采用肌电信号作为控制信号源,而以神经信息作为控制信号源的假手研究是新型仿人型假手的发展趋势,在相关领域的探索与研究不仅具有巨大的理论价值,而且具备有广阔的市场价值前景。
[1]庞在祥,宫丽男,姜大伟,等.基于CATIA/ADAMS仿人灵巧手建模与动力学仿真[J].长春工业大学学报(自然科学版),2013, 34(3):264~267.
[2] 李盼盼,喻洪流,赵胜楠.人体外动力假手技术的研究状况及发展趋势[J].中国康复医学杂志,2011, 26(7):665~668.
[3] 易昌中.一种基于AD转换装置的肌电假手设计[J].宜春学院学报,2015, 37(12):46~48.
[4] 陈江城,张小栋,李睿,等.利用表面肌电信号的下肢动态关节力矩预测模型[J].西安交通大学学报,2015, 49(12):26~33.
[5] 梅卫进,杨昌锦.压电体表面电极圆形脱层屈曲仿真研究[J].电子元件与材料,2015, 34(10):36~39.
[6]JiangN,RehbaumH,VujaklijaI.Intuitive,Online,Simultaneous,andProportionalMyoelectricControlOverTwoDegrees-of-FreedominUpperLimbAmputees[J].NeuralSystemsandRehabilitationEngineering,IEEETransactionson, 2014, 22(3): 501~510.
[7] 赵漫丹,李东旭,范才智,等.基于肌电信号层级分类的手部动作识别方法[J].北京生物医学工程,2014, 33(5):490~496.
[8] 张启忠,席旭刚,罗志增,等.基于肌电信号的遥操作机器人控制技术[J].应用基础与工程科学学报,2013, 21(6):1999~1209.
[9]AngelaPG,RonaldLR,RehaU.Statisticaloptimumestimationtechniquesforcombinatorialoptimizationproblems:areviewandcritique[J].JournalofHeuristics, 2014, 20(3): 329~358.
[10] 张良清,苏沂峰,杨万章,等.多功能上肢假肢的研究进展[J].国际生物医学工程杂志,2013, 36(5):311~316.
[11]ErgunH,RawnB,BelmansR.TechnologyandTopologyOptimizationforMultizonalTransmissionSystems[J].IEEETransactionsonPowerSystems, 2014, 29(5):2469~2477.
[12]PatriciaM,OliviaM,OscarC.AVisualToolboxforModelingandTestingMulti-NetNeuralSystems[J].ComputerApplicationsinEngineeringEducation, 2013, 21(1):164~184.
[13] 赵文汝,GregoryAZ.小腿截肢残端假体的实验研究[J].中国康复医学杂志,2003, 18(9):548~551.
[14] 梁昌银,雒江涛,周丽娴,等.基于Android平台声控应用的研究与开发[J].语音技术,2013, 37(12):70~74.
[15] 刘磊,花卉.数字信号处理技术在测控系统中的发展与应用[J].科学与财富,2015, 15(6):1671~2226.
[16] 逯玉林,杨静.多用途声控电动代步车应用与研究[J].机械研究与应用,2012, 25(3):84~85,89.
[17] 孟杰,刘艳.声光双控节能灯电路设计[J].价值工程,2012, 31(7):31.
[18] 聂茹.声控开关电路的设计与实现[J].信息技术,2014, 38(10):175~177.
[19]NathaliaP,HosseinGN,HamidC.VoicecontrolledWheelchairs:FineControlbyHumming[J].ComputerMethodsandProgramsinBiomedicine, 2013, 112(1):156~165.
[20]WalterRF,OchalaJ.SkeletalMuscle:ABriefReviewofStructureandFunction[J].CalcifiedTissueInternational, 2015, 96(3):183~195.
[21] 王从政,胡松,高椿明,等.一种小型双路水下电视驱动系统设计[J].测控技术与仪器仪表,2015, 41(12):58~60,64.
[22] 陈爽,胡鑫,雷毅,等.多姿态变换声控轮椅车研究[J].中国康复医学杂志,2014, 29(11):1070~1073.
[23] 姜力,黄琦,杨大鹏,等.基于状态转换机制的仿人型假手肌电控制方法[J].高技术通讯,2013, 23(12):1268~1274.
[24] 王森章,胡天培,陈中伟.再造“指”假手控制系统的研究[J].微型电脑应用,1997, 13(6):22~76.
[25] 田艳举,张小栋,张黎明.仿生假手的温度感知技术研究[J].机械与电子,2015 (10):12~16.
[26] 王炜,杨志贤,戴传昌,等.足趾移植拇指再造的美学原理及拇指缺损分类[J].组织工程与重建外科杂志,2005, 1(3):123~127.
[27] 黄海东,胡修德,腾超,等.指腹梭形皮瓣转移整形再造指[J].中华手外科杂志,2009, 25(1):38~39.
[28] 巨积辉,李雷,李建宁,等.趾动脉终末支岛状皮瓣重塑再造指外形[J].中华手外科杂志,2011, 27(3):138~140.
[29] 巨积辉,李雷,李建宁,等.趾动脉终末支岛状皮瓣结合压力治疗重塑再造指外形[J].中国美容整形外科杂志,2012, 23(5):270~273.
[30] 王立伟,蔡奇,肖尧,等.生物肌电信号前置放大电路设计[J].国际生物医学工程杂志,2011, 34(4):53~55,92.
[31] 张剑杰.主动肌肉收缩对缓解运动疲劳的实验分析[J].科技通报,2015, 31(2):19~21.
[32] 陈谦.sEMG技术在颈部肌肉活动评价中的应用[J].北京体育大学学报,2008, 31(2):226~229.
[33] 倪自强,王田苗,刘达.医疗机器人技术发展综述[J].机械工程学报,2015, 51(13):45~52.
[34] 武金艳,易波.信息融合熵在临床诊断中的应用研究[J].国际生物医学工程杂志,2010, 26(31):101~103.
[35] 武继祥,刘宏亮,周贤丽,等.上肢残肢的常规康复治疗和肌电信号反馈训练[J].中华物理医学与康复杂志,2008, 30(12):833~835.
[36] 孟明,佘青山,罗志增.HMM在下肢表面肌电信号步态识别中的应用[J].华中科技大学学报(自然科学版),2011, 39(11):176~177.
[37]DavidC,DavidG.EffectsofTasksonBoldSignalResponsestoSentenceContrasts:ReviewandCommentary[J].BrainandLanguage, 2012, 120(2):174~186.
[38] 张庭,姜力,刘宏,等.仿生假手抓握力控制策略[J].机器人,2012, 34(2):190~196.
[39] 郑显华,刘新华,张霖,等.基于Adams的仿人机械灵巧手动力学仿真分析研究[J].制造业自动化,2013, 35(14):147~149.
[40] 吴伟国,赵洋.仿人四指灵巧手的抓持能力分析[J].机械设计与制造,2010(4):188~190.
[41] 张小栋,郭晋,李睿,等.表情驱动下脑电信号的建模仿真及分类识别[J].西安交通大学学报,2016, 50(6):1~8.
[42] 徐宝国,宋爱国,费树岷.在线脑机接口中脑电信号的特征提取与分类方法[J].电子学报,2011, 39(5):1025~1030.
[43]Pfurtscheller.EEGSynchronisationDuringCovertandOvertMovement[J].ClinicalNeurophysiology, 2008, 119(9):101.
[44] 郑军.基于稳态视觉诱发电位的脑-机接口研究[J].科学技术与工程,2011, 11(33):8149~8154.
[45] 唐肖芳,周金治.基于散度分析的脑电信号特征选择[J].计算机工程,2015, 41(5):290~294.
[46] 施伟俊,王蓓,卿湘运,等.基于AR-Copula与ICA的脑电噪声检测和去除[J].华东理工大学学报(自然科学版),2015, 41(5):659~665.
[47] 张少白,王勇,刘友谊.基于DIVA模型的脑电信号去噪方法研究[J].电子学报,2015, 43(4):700~707.
[48] 姜波,朱林剑,孙守林,等.脑电信号控制上肢假肢的研究现状[J].中国康复医学杂志,2005, 20(3):216~217.
[49] 程明,高上凯,张琳.基于脑电信号的脑:计算机接口[J].北京生物医学工程,2000, 19(2):113~118.
[50] 王鹏,李珊珊,邵明磊.便携式脑电信号实时采集系统[J].哈尔滨理工大学学报,2016, 21(1):77~82.
[51] 段锁林,尚允坤,潘礼正.多类运动想象脑电信号特征提取与分类[J].计算机测量与控制,2016, 24(2):283~287.
[52] 高莉,黄力宇,丁翠玲.结合PCA和ICA的脑磁信号消噪研究[J].西安电子科技大学学报,2007, 34(6):939~943.
[53] 李广勇,黄晓霞.基于CSP与WPD算法的脑磁信号特征提取研究[J].现代计算机,2015 (12):3~6.
[54] 张学军,彭丽艳,黄丽亚,等.基于多维复杂度的精神分裂症脑磁信号区分[J].计算机工程与应用,2016, 52(23):12~18, 24.
[55] 王干,王华力.基于精细化频带的脑磁信号跨频耦合特性分析[J].信号处理,2016, 32(11):1328~1338.
[56] 王健锋,黄晓霞.基于EMD和Hilbert变换的脑磁信号特征提取和分类[J].上海海事大学学报,2014, 35(3):90~94.
[编辑] 洪云飞
2016-11-13
国家自然科学基金项目(51575407)。
李公法(1979-),男,博士,教授,现主要从事假手控制、智能机器人、灵巧手稳定控制等方面的研究工作,ligongfa@wust.edu.cn。
TP241
A
1673-1409(2017)01-0052-07
[引著格式]江都,杜峰,李公法,等.假手控制信号源研究进展[J].长江大学学报(自科版),2017,14(1):52~58.