基于非线性自适应滤波算法的齿轮传动系统振动主动控制
2017-04-11李自强李以农钟银辉杜明刚
李自强, 李以农, 钟银辉, 杜明刚, 杨 阳
(1.重庆大学 机械传动国家重点实验室 重庆 400044;2.重庆大学 汽车工程学院,重庆 400044 3.北方车辆研究所,北京 100072)
基于非线性自适应滤波算法的齿轮传动系统振动主动控制
李自强1,2, 李以农1,2, 钟银辉2, 杜明刚3, 杨 阳3
(1.重庆大学 机械传动国家重点实验室 重庆 400044;2.重庆大学 汽车工程学院,重庆 400044 3.北方车辆研究所,北京 100072)
为了削减齿轮传动系统的振动响应,提出了在靠近激励源处附加压电堆作动器同时抑制两对齿轮振动的双通道主动控制结构。鉴于FxLMS自适应滤波算法对非线性系统应用的局限性,采用了一种非线性自适应滤波双线性FxLMS(Bilinear FxLMS, BFxLMS) 算法。由于次级通道的准确性对于BFxLMS算法的控制性能有很大的影响,而应用较广的叠加噪声次级通道辨识技术会降低控制系统的效果,因此采用了一种直接估计误差技术对次级通道进行在线辨识,搭建了二级齿轮传动系统振动主动控制试验台,利用dSPACE作为控制器进行了半实物仿真试验。试验结果表明,在以两对齿轮啮合基频为衰减目标时,应用BFxLMS算法和FxLMS算法控制的齿轮箱体上的振动都有明显的减弱,而BFxLMS算法在齿轮传动系统主动控制应用中有更好的控制效果,在第一对齿轮啮合基频处可以达到11 dB的衰减量,在第二对齿轮啮合基频处可以达到10 dB的衰减量。
非线性自适应滤波;振动主动控制;BFxLMS;在线辨识;齿轮传动系统
齿轮系统是机械、汽车、航空航天国防等领域应用最为广泛的传动装置。齿轮工作状态极为复杂,载荷工况和动力装置多种多样,不仅会产生由发动机或负载方面引入的外部激励,而且会出现由时变啮合刚度、齿轮传动误差和啮入啮出冲击所引起的内部激励[1]。由于这些激励的存在,齿轮系统在工作时将不可避免地产生振动,这不仅影响齿轮系统的传动精度,产生噪声,同时也加速了传动系统的疲劳损害。
为了减小齿轮系统传动过程中的振动噪声,众多学者的研究已从优化齿轮的结构刚度、改善加工工艺、轮齿修形、提高加工精度等被动控制方面进行了大量的研究。随着科技进步,被动控制难以满足人们对传动系统的振动和噪声的要求,主动控制技术在齿轮传动系统中的应用成了研究的新途径。目前,国内外已有少数学者对齿轮传动系统振动主动控制做了初步的研究。 MONTAGUE 等[2]利用两个压电片黏附在轴的表面上作为作动器并运用前馈控制器来控制齿轮的啮合振动,在较高啮合频率下衰减了超过70%的振动,但试验需要通过手动调节相位移相器并放大用来驱动作动器; REBBECHI 等[3]在输入轴轴承座设置一对磁致伸缩作动器并采用自适应前馈控制器来阻断齿轮轴与箱体的振动传递,结果显示箱体的振动、噪声的啮合基频和前二阶谐波频率的响应同时得到减少,在基频处振动衰减达到了20~28 dB,但是这种主动控制结构较为复杂。同年,CHEN 等[4]采用三个磁致伸缩作动器安装在齿轮端面产生圆周力来抑制扭转振动,在 150~350 Hz 的基频范围内将扭转振动衰减了7 dB,但这种主动控制方法需要特殊的滑环结构。 WU等[5]利用数字信号处理器,对比分析了三种控制器对齿轮系统的振动控制性能,其中结合滤波 x最小均方值(FxLMS)算法的混合控制器在 27 Hz 频率下衰减了振动7 dB,但这种混合控制器过于复杂难以实际应用。同年,LI等[6]采用压电陶瓷作为作动器并结合延迟 x 最小均方值(Delayed-x LMS, DLMS)算法对齿轮振动进行主动控制,试验结果表明齿轮箱体振动有了一定的减少,但仅用几个延迟来代替次级通道模型使得实际应用存在较大局限性。丁庆中等[7-8]采用压电陶瓷直接作用在齿轮啮合点附近,并采用前馈FxLMS算法对齿轮系统振动主动控制进行了研究,试验结果表明在不同啮合频率下都有控制效果,但试验系统为单级齿轮系统,且传动比为1,并将齿轮系统假设成了线性系统。
由于齿轮系统在传动过程中的时变性和非线性,齿轮系统难以精确建模,所以利用传统的定常控制系统难以满足控制要求。FxLMS 算法是一种线性的自适应滤波控制算法,是由 WIDROW 等[9]和 BURGESS[10]分别在有关自适应控制和有源噪声控制的研究中提出的,目前是振动主动控制中应用最为广泛的算法,但是FxLMS算法在对非线性系统的控制中存在局限性。 TAN等[11]提出了自适应沃尔泰拉FxLMS算法以补偿FxLMS算法不适用于非线性系统的缺点,仿真结果表明该算法在非线性系统中仍然有良好的控制效果,但该算法计算量大,通常取二阶。 KUO等[12]在非线性有源噪声控制中提出了一种双线性FxLMS(Bilinear FxLMS,BFxLMS)算法,仿真结果表明该算法对非线性系统的控制有很好的性能。
齿轮系统在实际应用中多为减速机构,所以本文搭建了一个二级齿轮减速系统的振动主动控制试验平台,分别安装两个压电堆作动器在靠近齿轮啮合处的输入轴和输出轴上,采用直接估计误差技术进行次级通道在线辨识,分别运用非线性自适应滤波BFxLMS算法和线性自适应滤波FxLMS算法作为控制器,以两对齿轮啮合基频为控制目标,利用作动器输出位移来控制齿轮轴的弯曲振动,进而对比两种控制器对齿轮传动系统振动的控制性能。
1 非线性自适应控制算法
鉴于齿侧间隙引起齿轮传动系统非线性振动,以及压电堆作动器的迟滞非线性特性,齿轮传动系统在振动控制过程中存在强烈的非线性因素,而这些非线性将会降低线性自适应滤波算法FxLMS的控制效果。本文研究了一种非线性自适应滤波BFxLMS算法,从而来补偿FxLMS在非线性系统应用中的不足。

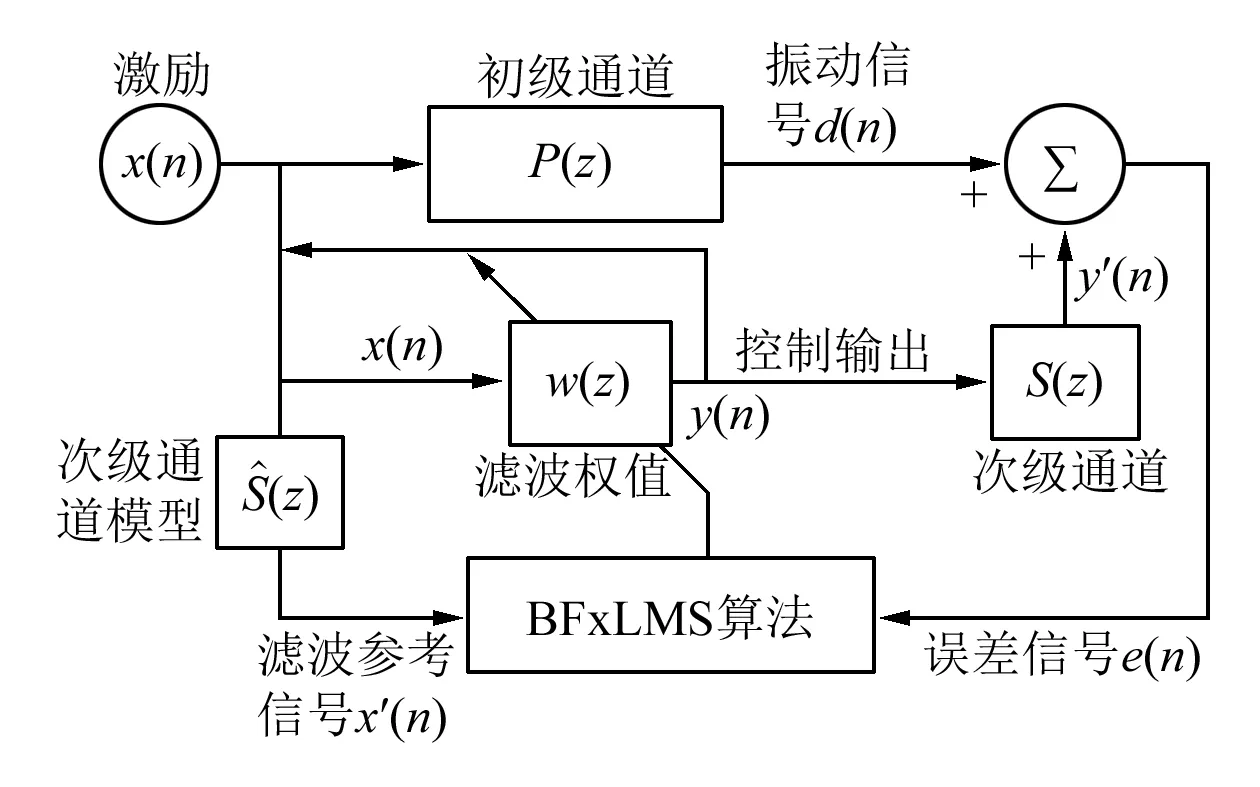
图1 BFxLMS算法控制框图Fig.1 Control diagram of BFxLMS algorithm
e(n)=d(n)+y′(n)
(1)
在n时刻,控制器的输出表示如下
(2)
式中ai(n)、bj(n)和cij(n)可以采用不同的长度,但为了简化控制算法,本文采用相同的长度L。BFxLMS算法之所以具有非线性控制特性,是因为式(2)中第三项存在输入信号和输出信号相乘的二次项,当cij(n)=0时,其实就是一个线性的FxLMS自适应滤波器。运用向量对式(2)进行重写,得到
y(n)=AT(n)X(n)+BT(n)Y(n-1)+
CT(n)V(n)
(3)
式中A(n)是前馈因子向量,长度为L+1
A(n)=[a0(n)a1(n),…,aL(n)]T
(4)
X(n)是长度与A(n)对应的参考信号
X(n)=[x(n)x(n-1),…,x(n-L+1)]T
(5)
B(n)为反馈因子向量,长度为L
B(n)=[b1b2,…,bL]T
(6)
Y(n-1)是一个采样延迟且长度与B(n)对应的反馈信号
Y(n-1)=[y(n-1)y(n-1),…,y(n-L)]T
(7)
C(n)是交叉因子向量,长度为L(L-1)
C(n)=[c01(n),…,c0L(n)c11(n),
…,c1L(n),…,cLL(n)]T
(8)
V(n)是长度与C(n)对应的交叉信号
V(n)=[x(n)y(n-1),…,x(n)y(n-L)x(n-1)×
y(n-1),…,x(n-1)y(n-L),…,
x(n-L+1)y(n-L)]T
(9)
结合式(4)、(6)、(8)因子向量,得到
W(n)=[AT(n)BT(n-1)CT(n)]T
(10)
结合式(5)、(7)、(9)信号向量,得到
U(n)=[XT(n)YT(n-1)VT(n)]T
(11)
然后,控制器输出就可以改写成
y(n)=WT(n)U(n)
(12)
相似与FxLMS算法,使用最速下降算法得到最小方差
(13)
不难推出,BFxLMS算法权值迭代公式
A(n+1)=A(n)+μaX′(n)e(n)
(14)
B(n+1)=B(n)+μbY′(n-1)e(n)
(15)
C(n+1)=C(n)+μcV′(n)e(n)
(16)
在实际应用中,初级通道往往存在线性和非线性的情况,次级通道存在采用最小相位和非最小相位的情况,所以在仿真对比分析BFxLMS算法和FxLMS自适应滤波算法时,分别采用不同的初级通道和次级通道。采用一个正弦信号加白噪声模拟齿轮振动信号作为输入信号,BFxLMS算法和FxLMS算法长度都取L=64。
1)初级通道为线性,次级通道为最小相位P(z)=0.8z-6+0.6z-7-0.2z-8-0.5z-9- 0.1z-10+0.4z-11-0.05z-12
(17)S(z)=0.3z-2+0.6z-3+0.1z-4-0.4z-5- 0.1z-6+0.2z-7+0.1z-8+0.01z-9+0.001z-10
(18)
仿真结果如图2所示,从图中可以看出,在初级通道为线性,次级通道为最小相位时,BFxLMS算法和FxLMS算法在正弦信号频率处都有很好的控制效果,但BFxLMS算法在整个频域的控制效果比FxLMS算法好。

图2 线性初级通道,次级通道为最小相位时的仿真结果Fig.2 The results with linear primary path and minimumphase secondary path
2)初级通道为线性,次级通道为非最小相位
S(z)=z-2+1.5z-3-z-4
(19)初级通道采用式(17),所得的仿真结果如图3。从图中可以看出,BFxLMS算法和FxLMS算法在正弦信号频率处控制效果都有所减弱,但BFxLMS算法的控制效果明显好于FxLMS算法,且在整个频域的也有明显的优势,所以在该情况下BFxLMS算法比FxLMS算法更适用。

图3 线性初级通道,次级通道为非最小相位时的仿真结果Fig.3 The results with linear primary path and non-minimum phase secondary path
3)初级通道为非线性,次级通道为非最小相位
P(z)=0.8z-6+0.6z-7-0.2z-8-0.5z-9-
0.1z-10+0.4z-11-0.05z-12+
5(0.5z-6+0.6z-7-0.2z-8-0.5z-9-
0.1z-10+0.4z-11-0.05z-12)2
(20)次级通道采用式(19),所得的仿真结果如图4所示。从图中可以看出,由于控制系统存在非线性的传递通道,系统的输出信号出现了二次谐波信号,FxLMS算法在正弦信号频率线性部分还是有明显的控制效果,但对于二次谐波的非线性部分却失去了控制作用,而BFxLMS算法不仅在正弦信号频率处的控制效果优于FxLMS算法,同时对于非线性的二次谐波也有明显的控制效果,所以BFxLMS算法对非线性系统也有很好的控制性能。
2 辨识算法
在控制系统中,控制信号到误差信号之间的传递函数是影响控制系统性能的重要因素,称之为次级通道,对于BFxLMS算法,次级通道的辨识精度直接影响控制系统的收敛性及稳定性。目前次级通道在线辨识主要有两种:在控制器输出端叠加噪声进行辨识和利用控制信号本身进行辨识。前者叠加的噪声信号会在控制后的信号中成为残余信号,控制对其不产生作用,同时控制通道也会对次级通道辨识产生影响。后者将会限制控制系统的收敛性能和控制效果。对于该齿轮传动系统运行过程中,次级通道的脉冲响应是连续变化的,利用离线辨识难于得到很好的控制效果。本文采用一种直接估计误差技术对次级通道进行在线辨识,其原理如图5和图6所示。
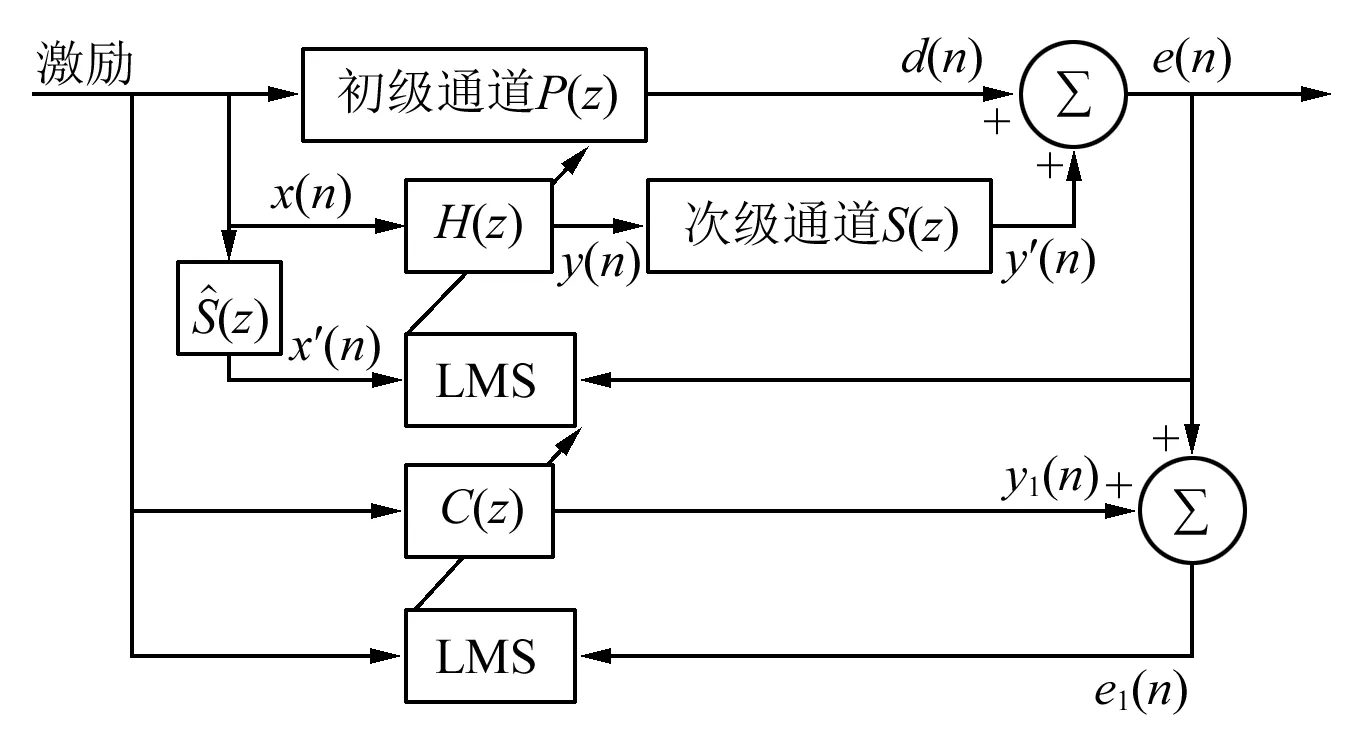
图5 主动控制环节Fig.5 The segment of active control

图6 次级通道辨识环节Fig.6 The segment of secondary path identification
为了简化控制算法的实现过程,设所有滤波器长度为L。参考输入向量
X(n)=[x(n)x(n-1),…,x(n-L+1)]T
(21)
控制滤波器权向量
H(n)=[H1(n)H2(n),…,HL(n)]T
(22)
附加并行滤波器权向量
C(n)=[C1(n)C2(n),…,CL(n)]T
(23)
控制器输出向量
Y(n)=[y(n)y(n-1),…,y(n-L+1)]T
(24)
式中y(n)=HT(n)X(n)
次级通道滤波器权向量
S(n)=[S1(n)S2(n),…,SL(n)]T
(25)
(26)
误差信号
e(n)=d(n)+y′(n)
(27)
e1(n)=e(n)+y1(n)
(28)
式中,y′(n)=YT(n)S(n),y1(n)=XT(n)C(n)
控制通道权向量迭代规律如下
H(n+1)=H(n)-μHe1(n)X′(n)
(29)
X′(n)=[x1(n)x1(n-1),…,x1(n-L+1)]T
(30)

C(n+1)=C(n)-μce1(n)X(n)
辨识通道输入信号
V(n)=[v(n)v(n-1),…,v(n-L+1)]T
(31)
图6中C1(z)、H1(z)对应n时刻的权值,C2(z)、H2(z)对应n-1时刻的权值。则C1(z)-C2(z)、H2(z)-H1(z)对应的向量为C(n)-C(n-1)、H(n-1)-H(n),令
ΔC(n)=C(n)-C(n-1)
(32)
ΔH(n)=H(n-1)-H(n)
(33)
误差信号为
(34)
式中
V′(n)=[v′(n)v′(n-1),…,v′(n-L+1)]T
v′(n)=VT(n)ΔH(n)
辨识环节权向量迭代规律为
(35)
为了对比直接估计误差技术和叠加噪声技术的在线辨识算法的性能,本文采用了文献[7]中的齿轮系统的初级通道模型和次级通道模型,并结合FxLMS算法进行了仿真分析。其中采用一个正弦信号叠加白噪声来模拟齿轮振动信号,直接估计误差技术与叠加噪声技术的所有滤波器长度均为64,FxLMS算法的迭代步长均为0.01,仿真步长取为0.000 5。
图7和图8分别显示了直接估计误差技术和叠加噪声技术在线辨识主动控制的时域效果和频域效果。从时域图中可以看出直接估计误差技术在线辨识方法比叠加噪声技术在线辨识方法收敛速度更快,且残余信号的幅值更小。从频域图中可以明显看出,由于叠加噪声技术叠加的噪声会经过控制系统但得不到控制,叠加的噪声会存在于残余信号中,从而增加了残余信号的幅值,而直接估计误差技术次级通道辨识环节与控制环节是相互独立的,从而在控制系统中不会引入噪声。

图7 在线辨识时域仿真结果Fig.7 Result of online identification in time domain
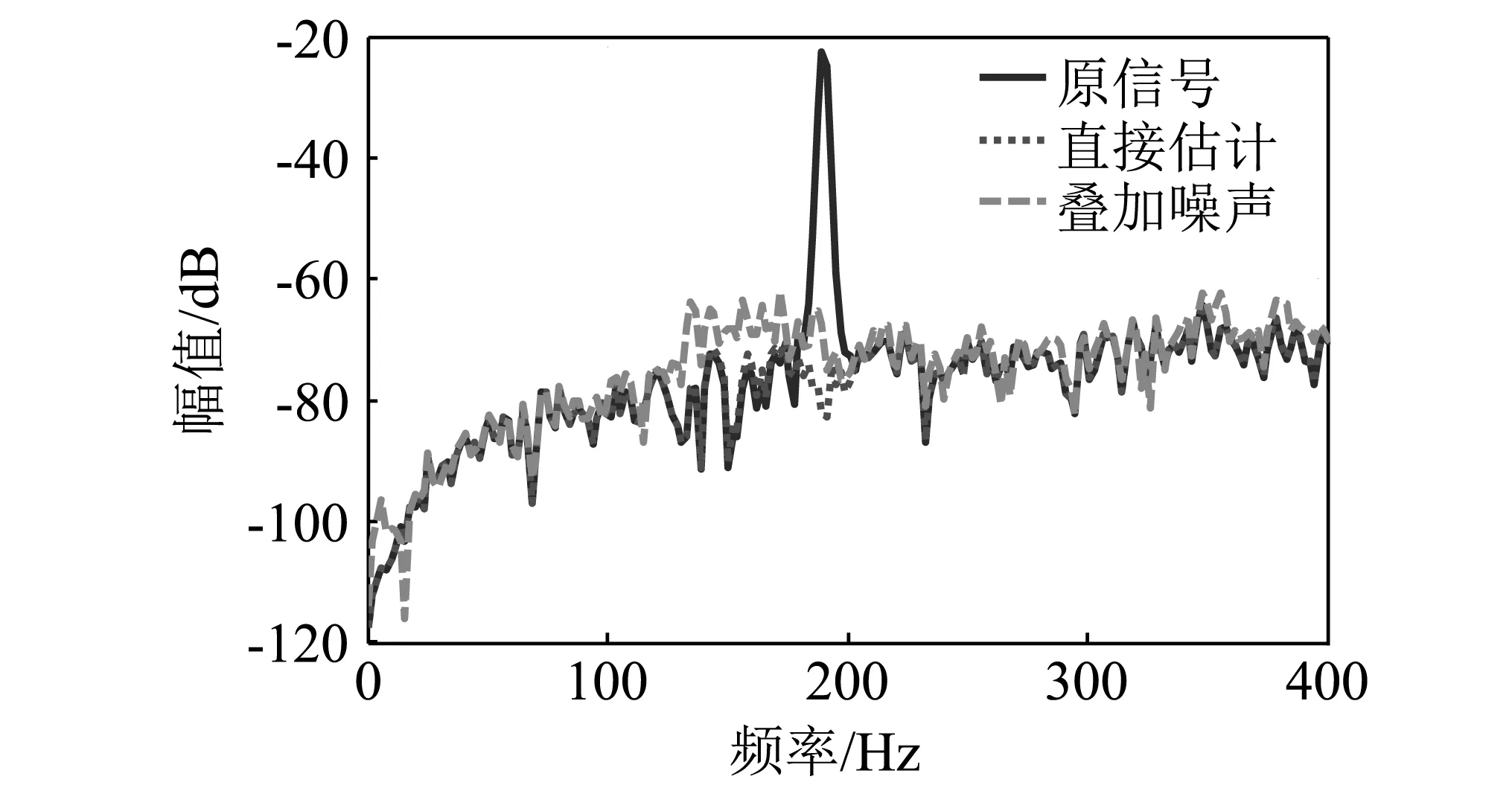
图8 在线辨识频域仿真结果Fig.8 Result of online identification in frequency domain
图9是经过在线辨识的次级通道与实际仿真用次级通道的频率特性Bode图,从图中可以看出,不管是幅频特性还是相频特性,直接估计误差技术和叠加噪声技术在线辨识的次级通道都能较好的与实际次级通道频率特性重合。图10显示了次级通道在线辨识相对误差及收敛特性,该性能评价公式如下
(36)
从图中也可以明显的看出,直接估计技术比叠加噪声技术有更快的收敛特性,且估计相对误差更小。

图9 辨识的次级通道Bode图Fig.9 Bode diagram of secondary path identification
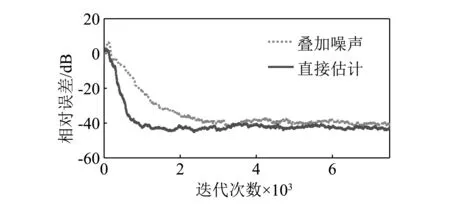
图10 辨识收敛性能Fig.10 Convergence performance of secondary path identification
3 齿轮传动系统主动控制试验
齿轮传动装置工作时,齿轮的传动误差引起的振动将影响传动系统的传动性能,沿啮合线方向产生动态啮合力,引起齿轮轴的扭转和弯曲振动,其中弯曲振动是齿轮传动系统的主要振动形式之一。如果在靠近齿轮啮合误差激励的齿轮轴处沿啮合线方向施加一个作用力,将有效的抑制齿轮振动的能量和传递。本文基于抑制齿轮轴弯曲振动的思想,采用两个压电陶瓷作为作动器,通过附加轴承直接布置在靠近齿轮啮合处的齿轮轴上,设计加工了二级齿轮传动系统振动主动控制结构,并搭建了功率开放式的振动主动控制试验平台,如图11所示。齿轮系统和压电陶瓷的参数如表1和表2。

1.计算机 2.LMS Test.Lab 3.扭矩测量仪 4.电流加载控制仪 5.dSPACE接口板 6.dSPACE AutoBox控制箱 7.功率放大器 8.电荷放大器 9.压电作动器② 10.加速度传感器① 11.加速度传感器② 12.测功机 13.二级齿轮减速箱 14.压电作动器①15.电机

参数数值模数/mm2传动比3:1压力角/(°)20齿数19,37,23,35轴长/mm153轴径/mm18

表2 压电陶瓷参数Tab. 2 The parameters of the piezoelectric ceramic
采用dSPACE 实时控制仿真系统为振动主动控制的控制系统,将基于直接估计误差技术在线辨识的BFxLMS算法下载到dSPACE作为控制器,控制器的输入端为振动加速度传感器,输出端为压电作动器。试验平台布置两个振动加速度传感器(标号10、11)和两个压电作动器(标号9、14),并将加速度传感器所测得的加速度信号作为残余误差信号。对于该二级齿轮传动系统,需要同时对两对齿轮传动误差引起的振动进行控制,故采用双输入/双输出的自适应滤波控制策略,并同时对次级通道模型进行在线辨识。对于齿轮传动的复杂性和时变性,两对齿轮啮合过程中的误差激励信号难以准确获取,所以利用两个加速度传感器采集的残余误差信号,经过自适应滤波器进行频率估计进而得到齿轮啮合误差激励信号的频率,再通过波形合成信号发生器间接获得两个参考信号。图12为所采用的双通道算法结构图,主动控制结构如图13所示。
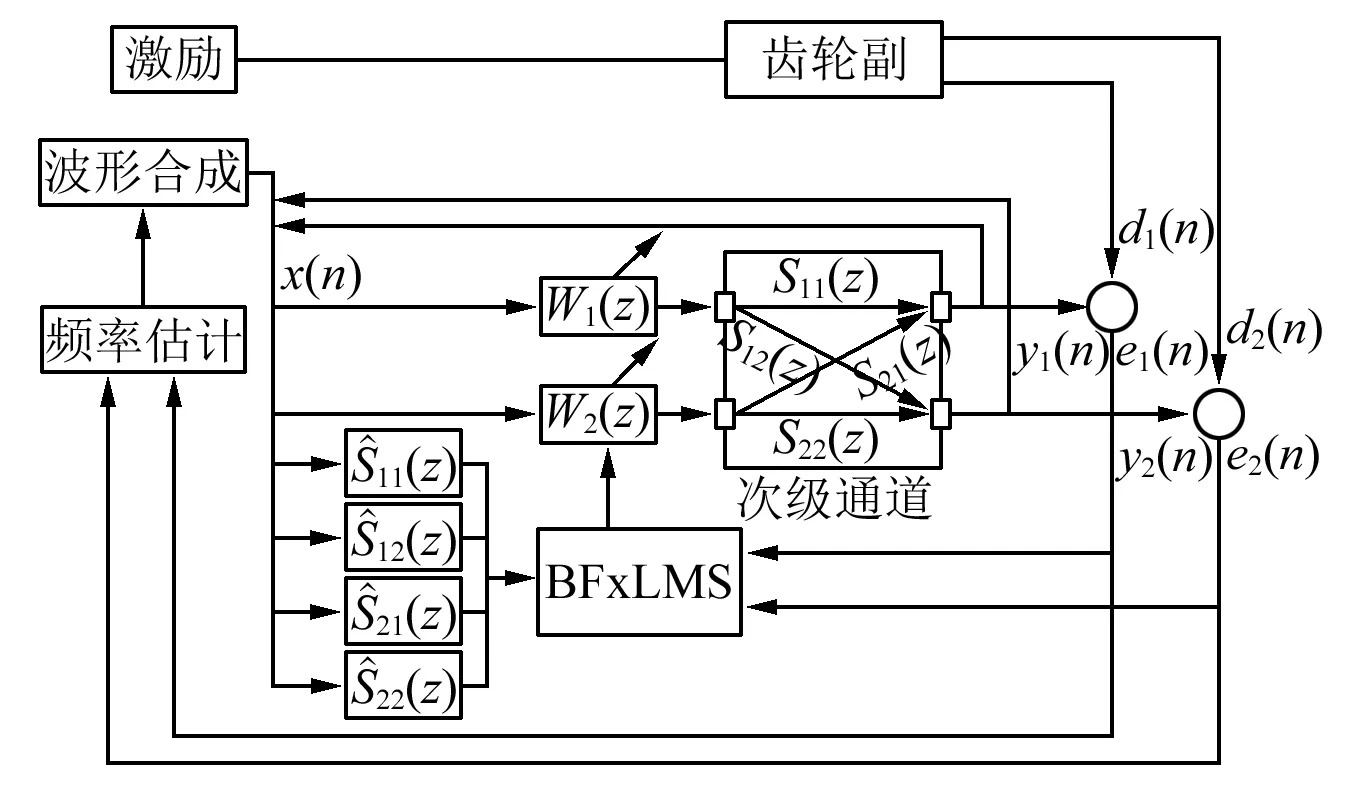
图12 双通道算法结构图Fig.12 The dual paths structure of the proposed algorithm

图13 本文主动控制结构Fig.13 The structure of active control
从滤波器设计理论上来说,FIR滤波器阶数越高,越能逼近实际的次级通道传递函数,但受限于控制芯片的计算能力,FIR滤波器的阶数不能太大。所以本文将所有控制通道的FIR滤波器长度都设为32,辨识通道的FIR滤波器长度都设为20,设定电机转速为600 r/min,试验负载为1 N·m,通过离线辨识给次级通道模型赋初值,进行在线辨识主动控制试验对比了BFxLMS算法和FxLMS算法在齿轮传动系统振动主动控制的性能。图14显示了直接估计误差技术在线辨识得到的所有次级通道的权值。图15显示了加速度传感器①所观测的运用BFxLMS算法的第一对齿轮处箱体振动的时域控制历程,在第10 s的时刻开始主动控制,箱体上加速度传感器①所测振动信号幅值从0.04g(1g=9.8 m/s2)衰减到小于0.03g,并在很快的时间便达到了稳定的控制效果。图16是加速度传感器①所观测的分别运用BFxLMS算法和FxLMS算法得到的频域控制效果对比图,在图中可以看出,FxLMS算法的控制在第一对齿轮啮合基频处有6 dB左右的衰减,在第二对齿轮啮合基频处有3 dB左右的衰减,而在其他频率有多处增大了振动能量。而BFxLMS算法的控制在第一对齿轮啮合频率处有11 dB的衰减,在第二对齿轮啮合基频处有6 dB的衰减,且其他频率处基本和原振动信号重合。这说明二级齿轮传动系统的非线性因素衰减了FxLMS算法的控制效果,也影响了FxLMS算法的稳定性,而BFxlms算法更具有适用性,同时也验证了仿真的结果。图17为加速度传感器②所观测的运用BFxLMS算法的第二对齿轮处箱体振动控制时域历程,在第10 s开始控制,箱体振动幅值从0.05g衰减到0.04g,也在很快的时间内达到了稳定的控制效果。图18为加速度传感器②所观测的分别运用BFxLMS算法和FxLMS算法的频域控制效果对比图,从图中可以看出FxLMS算法的控制在第一对齿轮啮合基频处有7 dB的衰减量,在第二对齿轮啮合基频处也有4 dB的衰减。而BFxLMS算法的控制在第一对齿轮啮合基频处达到了6 dB的衰减,同时在第二对齿轮啮合基频处也达到了10 dB的衰减量,同样可以说明,BFxLMS算法在齿轮振动主动控制中具有明显优势。

图14 所有次级通道辨识权值Fig.14 The weights of all secondary paths

图15 BFxLMS控制前后第一对齿轮处振动时域图Fig.15 The control result in time domain of BFxLMS at the first stage

图16 控制前后第一对齿轮处振动频域对比图Fig. 16 The comparison control results in frequency domain at the first stage
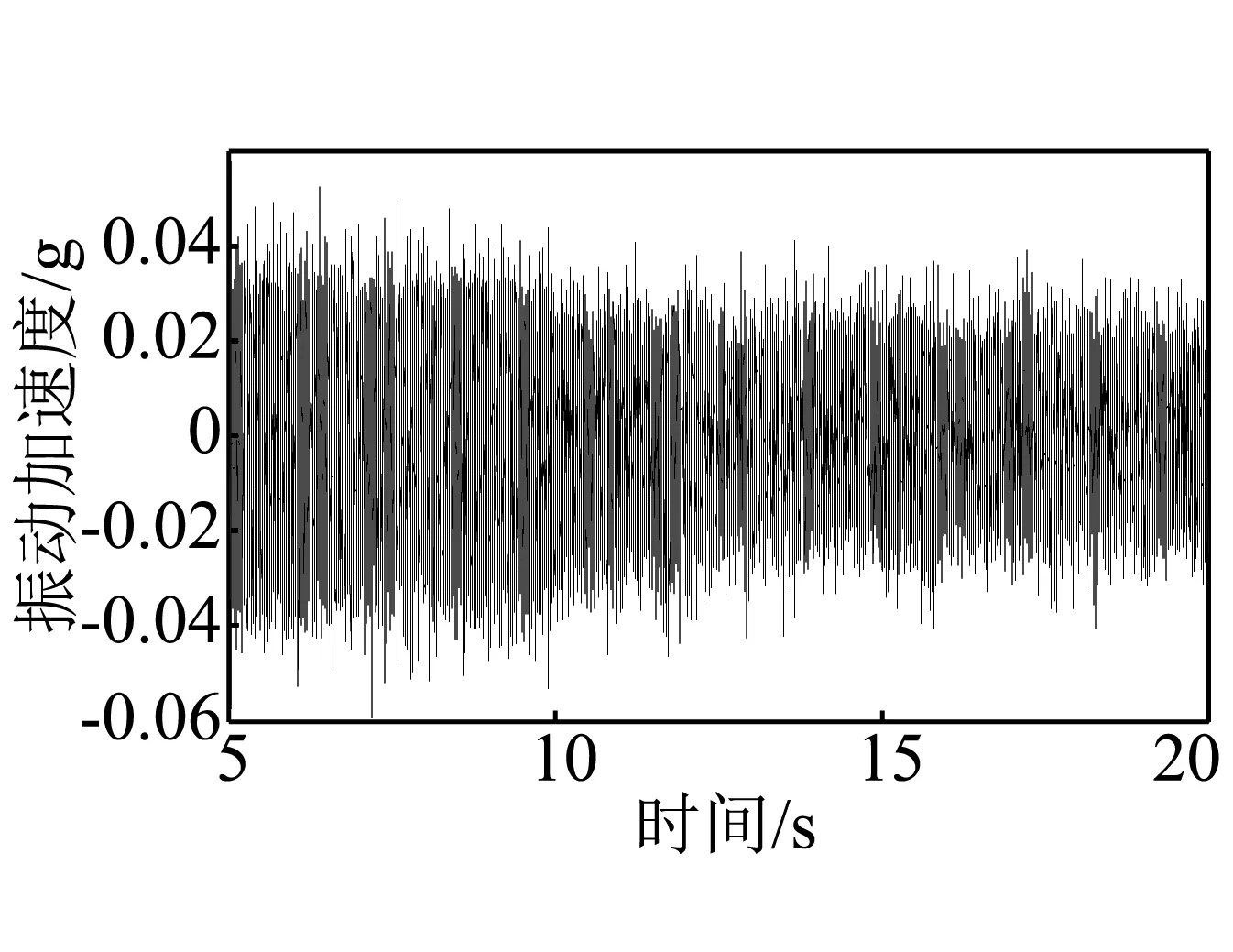
图17 BFxLMS控制前后第二对齿轮处振动时域图Fig.17 The control result in time domain of BFxLMS at the second stage

图18 控制前后第二对齿轮处振动频域对比图Fig. 18 The comparison control results in frequency domain at the second stage
4 结论
(1) 当控制系统中出现非线性因素,FxLMS算法的控制性能会变差,而FxLMS的改进算法BFxLMS算法能很好的弥补这一缺点,且在非线性系统的主动控制应用中保持稳定。
(2) 对于次级通道在线辨识的常用方法叠加噪声技术,由于叠加的噪声会进入控制通道而控制环节对其不产生控制效果,所以叠加的噪声在残余信号中完全体现,影响了控制效果。而直接估计误差技术的辨识环节与控制环节相互独立,在控制系统中不引入噪声,具有更好的控制效果,且在线辨识具有更快的收敛速度,更小的相对误差。
(3) 在对二级齿轮传动系统的应用中,BFxLMS算法比FxLMS算法的控制效果更好,在第一对齿轮啮合基频(190 Hz)处能达到11 dB的衰减量,在第二对齿轮啮合基频(118 Hz)处能达到10 dB的衰减量。
[ 1 ] 李润方,王建军. 齿轮系统动力学[M]. 北京: 科学出版社, 1997.
[ 2 ] MONTAGUE G T, KASCAK A F, PALAZZOLO A, et al. Feed-forward control of gear mesh vibration using piezoelectric actuators[R]. NASA Technique Memorandum 106366, 1994.
[ 3 ] REBBECHI B, HOWARD C, HANSEN C. Active control of gearbox vibration[C]. ∥Proceedings of the Active Control of Sound and Vibration Conference. Fort Lauderdale, FL: ACTIVE,1999: 295-304.
[ 4 ] CHEN M H, BRENNAN M J. Active control of gear vibration using specially configured sensors and actuators[J]. Smart Materials and Structures, 2000(9):342-350.
[ 5 ] WU Jianda, LIN Jiahong. Implementation of an active vibration controller for gear-set shaft usingμ-analysis[J]. Journal of Sound and Vibration, 2005, 281 (3/4/5): 1037-1055.
[ 6 ] LI M F, LIM T C, SHEPARD W S. Experimental active vibration control of gear mesh harmonics in a power recirculation gearbox system using a piezoelectric stack actuator[J]. Smart Materials and Structures, 2005, 14(5) :917-927.
[ 7 ] 丁庆中,李以农, 张锋,等. 基于自适应滤波算法的齿轮传动系统振动主动控制[J]. 机械工程学报,2013,49(15):76-81. DING Qingzhong,LI Yinong,ZHANG Feng,et al. Adaptive filter algorithm for active vibration control of gear transmission[J]. Journal of Mechanical Engineering, 2013, 49(15):76-81.
[ 8 ] 李以农,张锋,王雷,等. 次级通道在线辨识的齿轮啮合振动主动控制[J].振动与冲击, 2013, 32(16):7-12. LI Yinong, ZHANG Feng, WANG Lei, et al. Active vibration control of gear meshing based on online secondary path identification algorithm[J]. Journal of Vibration and Shock, 2013,32(16):7-12.
[ 9 ] WIDROW B, SHUR D, SHAFFER S. On adaptive inverse control[C]∥ Proc 15th Asilomar Conf. Sata Clara, CA,1981:185-189.
[10 ] BURGESS J C. Active adaptive sound control in a duct: a computer simulation [J]. The Journal of the Acoustical Society of America,1981, 70(3):715-726.
[11 ] TAN L, JIANG J . Adaptive volterra filters for active control of nonlinear noise processes[J]. Transactions on Signal Processing,2001, 49(8):1667-1676.
[12 ] KUO S M, WU H T. Nonlinear adaptive bilinear filters for active noise control systems[J]. Transactions on Circuits and Systems, 2005, 52(3): 617-624.
Nonlinear adaptive filtering algorithm for the active vibration control of gear transmission
LI Ziqiang1,2, LI Yinong1,2, ZHONG Yinhui2,DU Minggang3,YANG Yang3
(1. State Key Laboratory of Mechanical Transmission,Chongqing University, Chongqing 400044, China; 2.College of Automotive Engineering, Chongqing University, China; 400044, China; 3. China North Vehicle Institute, Beijing 100072,China)
A dual channel active control structure with a piezoelectric stack actuator attached near the excitation source was proposed to suppress the nonlinear vibration of two pairs of gears in a two-stage transmission simultaneously. In view of the limitation of the FxLMS adaptive filtering algorithm applied in the nonlinear system, a nonlinear adaptive filtering algorithm, Bilinear FxLMS (BFxLMS) , was adopted. Because the accuracy of the secondary path in the BFxLMS adaptive filtering algorithm has great effect on the control performance, and, in addition the secondary path identification technology which is used widely with feeding an extra noise will reduce the effect of control system, a direct estimation error technology was in troduced for the online identification of the secondary path. An experiment platform for studying active vibration controls was built, and a semi-physical simulation experiment was carried out using the dSPACE as the controller. The experiment results show that the vibration of thouse of a gear box transmission can be reduced obviously when the fundamental frequencies are taken as the control targets and the BFxLMS algorithm and the FxLMS algorithm are used for controlling, Moreover, the BFxLMS algorithm has a better performance in the active vibration control of gear transmission,the amplitude of vibration is attenuated by about 11 dB at the first fundamental frequency and by about 10 dB at the second fundamental frequency.
nonlinear adaptive filter; active vibration control; bfxlms; online identification; gear transmission
国家自然科学基金(50875270);中央高校基本科研业务费资 助(106112015CDJZR118805)
2015-09-14 修改稿收到日期: 2016-02-17
李自强 男,研究生,1989年生
李以农 男,教授,博士生导师,1961年生 E-mail : ynli@cqu.edu.cn
TU 311.3; TU 352.1
A
10.13465/j.cnki.jvs.2017.06.028
