基于SVPWM的软起动器研究
2017-04-10陈景文
陈景文, 张 东
(陕西科技大学 电气与信息工程学院, 陕西 西安 710021)
基于SVPWM的软起动器研究
陈景文, 张 东
(陕西科技大学 电气与信息工程学院, 陕西 西安 710021)
传统的基于电动机稳态数学模型的调压调速软起动器在启动电动机方面普遍存在着起动转矩小但电流大,且起动转矩和起动电流非线性的情况.为此,提出了一种以变频调速理论为基础,以电压空间矢量(SVPWM)原理为实现方法,并在深入研究这种以定子磁链轨迹为控制手段和方法的基础上,设计了一种六边形磁链轨迹的电压空间矢量控制策略的新型软起动器.使电压/频率比值相对稳定,保证电机主磁通稳定,在获得较大起动转矩的同时,又保证较小的起动电流.最后对所设计的装置进行了相应的实验测试,测试结果验证了该控制策略的正确性和有效性.
电压空间矢量; 软起动; 控制策略; 系统研究与设计
0 引言
迄今为止,交流异步电机仍然是重要的机电能量转换设备,消耗工业电能的50%以上.二十世纪60年代开始使用传统的定子电阻/电抗频敏变阻器软起动,水阻液阻软起动等降压起动方法,但起动效果和特性都不佳.二十世纪70年代开始进入电力电子器件的快速发展时期,晶闸管移相触发开始使用于降压软起动(即电子软起动器),该方法属于调压调速控制原理,与传统软起动相比有体积小、动作快等优点,但是调压软起动存在转矩小、电流大等问题.二十世纪80年代,变频技术开始发展成熟,其除可以控制电机的调速运行外,也完美的解决了异步电机的起动问题,但由于存在切换时电流突变的现象,到目前为止难以解决变频到工频的切换问题[1-3].
为提高异步电机起动转矩、降低起动电流.国外有人率先提出了离散变频软起动.其原理是在晶闸管软起动控制的基础上,通过控制导通的周波数和每个工频周期内导通电压的波形来实现电动机的软起动控制.它在原理上属于变频调速,但在技术路线上由于采用现有周波取样的方法虽然能够适当提高起动转矩,但存在谐波含量高电流仍然比较大等问题[4,5].
综上所述,目前软起动技术都存在着大电流、小转矩的根本问题.这是基于调压调速的基本原理所导致的,而离散变频软起动技术虽然在增加转矩方面有一定的理论依据和实验数据,但是由于其工作原理和电机自身的特点,在产生旋转磁场和抑制谐波方面又带了负序磁场过大,谐波电流过高等问题,在解决需要高起动转矩和低起动电流的应用方面其理论和技术的贡献度有限[6-8].针对这种状况,在大量的试验和剖析的基础上,作者提出了一种基于电压空间矢量的软起动器控制原理和实现方法.
1 电压空间矢量软起动器的控制实现方法和策略
本文提到的基于电压空间矢量的软起动器,借鉴了SVPWM的思想即使电机定子产生圆形磁场,但又不同于通常提到的SVPWM,通常所说的电压空间矢量控制是针对三相桥式电路拓扑结构提出的.其供电电源通常是直流的电压源或电流源,通过控制三组桥臂的六只开关管,使其产生8种组合,从而实现了空间上的8种电压矢量[9-11].而磁场可以近似等于电压的积分,因此也会在电机的定子产生8种磁链矢量,通过组合产生近似的圆形磁场.
而本文的电压空间矢量是基于交流电源的三相晶闸管调压电路拓扑结构提出的,在电路拓扑结构上不同于SVPWM,最终控制及实现方式上也区别于SVPWM[12-14].由于本文采用半控型器件晶闸管,其自身不能控制关断只能在自然换向点处关断.因此本文选用控制电源的部分电压导通,在下一个周期再依次导通部分电压,从而实现电压矢量的控制.并通过控制时间间隔来实现电机定子磁场的旋转速度,实现变频功能.
1.1 基于正弦波电压的空间矢量软起动器矢量分布分析
迄今为止电压空间矢量控制理论的应用几乎都是以三相对称交流或直流供电条件下实现.在对称交流电源供电下,定子磁链的大小和旋转方向由电源的幅值和频率确定,稳态下电机的磁链轨迹为圆;采用直流供电时,在电压空间矢量控制下形成由一个多边形组成的近似圆形电机磁链轨迹[15-18].这两种控制方法和原理已经成功的应用于现存的各种交流变频调速系统,在理论上是成熟的,在方法上也是比较完善的.而本文所要研究的所谓正弦两相交变供电是指由于对电机施加的是取自交流电网的某时段的正弦电压,并根据一定规则加载到电机两相绕组上,这相当于加在电机绕组上的电源既不是对称三相,也不是直流母线上三相逆变桥.
基于正弦波电压空间矢量软起动器实现以感应电机定子获得圆形磁链轨迹为目标,以交替使用不同的电压空间矢量为手段实现.为获得电动机转子正六边形磁链轨迹,在一个正弦周期内有选择地单独触发某两相得到一个线电压,每个线电压结束后间隔tg=(7π/6+α)/ω1,α为触发角,七个周期获取六个线电压依次作用于定子两端就会在转子产生一个六边形旋转磁链,调节α来改变线电压大小以完成对电动机恒Es/f控制.6个线电压构成一个旋转周期,频率50/7≈7.14Hz.以感应电机为星型接法情况做研究,电压空间矢量软起动控制策略参照图1,具体步骤如下:
(1)以每个电压矢量中相对偏正的相电压为参考电压,相电压的最近过零点即为该电压矢量的零参考点,即图1中的每个矢量触发前的实心点.如以A相过零上升沿为触发角零点,当ω1t=α1时同时触发A、C相,导通电压为UAC,电流过零时自然关断.
(2)由控制器控制可控硅导通间隔时间tg(此时可认为插入开路零电压矢量),后再触发导通UBC,依此循环触发形成UAC-UBC-UBA-UCA-UCB-UAB-UAC的六边形电压空间矢量.

图1 电压空间矢量7.14 Hz控制下的三相电压导通波形图
基于正弦波电压空间矢量软起动器以开环的控制策略为手段,通过程序控制晶闸管导通情况如图2所示,使得电机两端定子电压空间矢量按照六边形规律变化.

图2 电压空间矢量7.14 Hz控制下的三相电源波形图
1.2 电压空间矢量软起动器实现方法和控制策略研究
基于电压空间矢量的软起动器研究采用电压空间矢量的控制算法在调节电源频率的同时,也调节了电源电压.并使电压/频率比值相对稳定,保证电机主磁通稳定,在获得较大起动转矩的同时,起动电流又不致过大.基于电压空间矢量的软起动器采用六边形、十二边形等多边形磁链轨迹控制(6边形轨迹可以采用可控硅等半控器件实现,12边形则必须使用全控性器件),使磁链轨迹接近圆形,可以起动带有一定负载或较大惯性负载的电动机,而电流保持在相对较小的值.
图3为所应用的主电路结构.以7.14Hz时六边形的磁链轨迹控制为例子,具体电压调节实施方式如下.
如图2所示为电压空间矢量控制的三相电源波形图.该图是以α为90 °触发为例来说明的,其中t1、t2、t3、t4、t5、t6、t7对应不同的晶闸管触发时刻,阴影部分表示导通的时间.

每次触发晶闸管时,可以通过调节触发角α的大小来调节电压大小,由于电压空间矢量控制的周期为50/7≈7.14 Hz,结合前面的电压调节,可以保持恒定的电压/频率比,即保持电机主磁通恒定.待电机达到7.14 Hz以及输出相应电压后,可以按同样的方法将电源频率分别调节至10 Hz、12.5 Hz、16.7 Hz、25 Hz等,待电机达到该频率以及输出相应电压后再接入工频电源,继续按调压方式或限流的方式不断增大起动电压,直至电机起动完成;也可在电机达到7.14 Hz以及输出相应电压后,直接接入工频电源,继续按调压方式或限流方式不断增大起动电压,直至电机起动完成.

图3 电压空间矢量软起动器主电路
2 电压空间矢量软起动控制策略仿真分析
上一节主要是对电压空间矢量软起动从理论上进行分析,并用图解法分析了电压空间矢量软起动器.下面主要根据上文电压空间矢量软起动器理论分析内容,利用MATLAB中SIMULINK工具箱对电压空间矢量控制策略的软起动建模和仿真.
仿真中所用的电源电压为:
2.1 仿真参数
按照软起动原理图,利用MATLAB仿真软件SIMULINK工具箱搭建其仿真模型.仿真参数设置如下:三相交流电源为U1=380 V、频率f1=50 Hz,异步电动机额定功率P=15 Kw、额定电压Ue=380 V、额定频率fe=50 Hz,额定电流Ie=28.5 A,额定负载转矩Te=100 N·m.
2.2 电压空间矢量软起动仿真分析
依据上面提出的参数,对电压空间矢量软起动控制过程的分析,仿真结果如图4所示.图4为在电压空间矢量控制下的A相定子电流波形、转子转速曲线、电磁转矩瞬时值.由图4可见,定子电流是随着定子电压断续而断续的,电动机刚起动时由于静态负载转矩比较大且电动机需要加速起动,所以刚开始起动电流比较大,此时电动机的电磁转矩是脉动不连续的,单次脉动转矩较大断续时间也等于tg,由前面分析知tgmax=23.3 ms,tgmin=13.3 ms根据电动机电磁场理论,定子断电瞬间转子绕组内电流不等于0,电流在定子回路内按电路时间常数衰减,若断电时间很短,忽略衰减过程,则感应电机将在连续磁场中稳定运行.
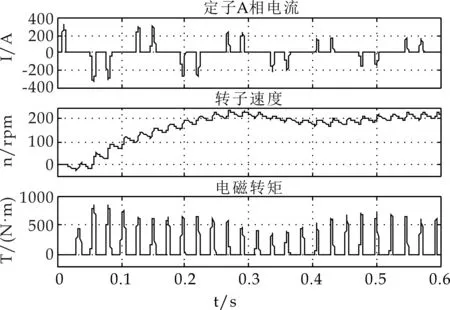
图4 电压空间矢量控制下定子电流、转子转速、电磁转矩
此时感应电机带80%负载起动,起动过程电流瞬时值最大为308A,有效值最大为105A,0.2s后待电动机进入7.14Hz的稳态运行电流减小到45A,约为额定电流的1.5倍;从整体来看起动过程瞬间脉动电流较大,也较斜坡升压减小24.5%,只是稳态运行时的额定电流较50Hz时大了50%,所以此时的7.14Hz不能长时间运行,只能作为短时调速或电动机起动过程.基于电压空间矢量的软起动控制方法是以电动机定子磁链为被控对象,以获得转子六边形磁链轨迹为目的设计的控制算法.按磁链轨迹的控制算法使得电动机转子加速更平滑,运行更加稳定.
图5为感应电机按电压空间矢量六边形磁链轨迹控制下的转子磁链.电动机静止时感应电机转子磁链按六边形轨迹增加,随着转速的上升感应电动机转子磁链轨迹开始螺旋增大趋近于圆形.因为磁链在感应电机电压断续tg时间内是按电路时间常数衰减的,即为图5中的波浪线,断电时间内就是磁链凹进入的时间,待电机又通电后磁链开始加速,即为磁链曲线外凸的过程.

图5 电压空间矢量控制下六边形定子磁链轨迹
3 基于电压空间矢量软起动器研发
由于电压空间矢量软起动器硬件系统是强电和弱电相互结合的系统,为了防止强弱电间的干扰,硬件系统必须进行隔离设计.
本系统选用高性能32位芯片STM32作为主控制器.该软起动器硬件包括两部分,分别是主回路和控制回路.以stm32为主控制器,Altera公司的EPM240T100C5N-CPLD可编程逻辑器件作为辅助控制芯片,选用红外遥控的方式进行操作设计等.
3.1 系统整机设计
图6为系统框图.主要由反并联晶闸管主回路、脉冲触发产生模块、电压电流检测模块等几部分组成.其中缺相、相序检测构成电压检测部分,STM32控制芯片接收到检测信息后产生控制信号,形成触发脉冲序列.

图6 整机设计图
该闭环系统的核心是STM32微控制器,当R相电压,VRN下降沿时,电压检测到过零检测器(ZCD)电路的数字脉冲,此脉冲输入到微控制器STM32.通过STM32微控制器中产生六路触发脉冲序列,通过晶闸管改变电源电压幅值,达到控制电机起动电流和转矩的目的.
3.2 硬件设计
软起动器硬件电路设计是整个系统设计开发过程当中的关键环节,也是整个系统能安全可靠工作的前提.电压同步检测,电压过零检测、缺相和相序检测;电流检测;控制及运行参数的设置和显示;采集外部输入信号.
(1)主控模块:为STM32及其外围电路.完成信号检测、判别、处理与控制,与遥控进行通讯等.
(2)辅助控制模块:以CPLD为中枢,实现对STM32的控制信号滤波,发出对应触发脉冲序列,给出旁路输出及故障报警等信号.
(3)电流检测模块:检测电流实现过流保护和限流作用.
(4)晶闸管触发系统:产生正确的触发脉冲保证晶闸管的可靠触发是整个系统工作的前提.
3.3 系统的软件设计
软件运行过程主要有:上电后进行程序初始化,初始化完成后,系统首先进行自我检测,检查是否存在如:缺相、相序错误等故障,若有故障停机检修,排除故障,给出准备信号.读入基于正弦波电压空间矢量的起动方式,对各参数的整定值进行采样,根据给定的初始电压、电流值的大小确定晶闸管起始触发角.判断起动是否开始,调用起动程序,判断起动是否完成,若完成则吸合交流接触器,进行数据采集处理及显示,同时在运行过程中进行检查,若发现故障则直接停车,反之,则读入设定停车方式.若起动未完成则进一步判断相应参数是否需要调整,根据调整后的参数进行起动.
由于篇幅有限,主要就主程序的设计作一详细说明,电压空间矢量软起动主程序,作为控制系统的大脑,对控制系统的各个子程序的行为起到指挥和调配作用.本设计中主程序如图7所示,虽然其结构看似简单,但是其是整个控制系统的灵魂,重要性无可替代.下面详细介绍其工作过程.

图7 系统总流程图
首先在控制系统上电后,要对主控制芯片内部的各个寄存器、外部的各个引脚进行上电初始化初始化操作;然后运行一系列的系统检测子程序,达到故障自检测的目标,通过读取各个对应引脚的参数,来判断当前电动机所处环境是否可以进行起动,这一阶段运行的子程序主要有通过检测电压、电流相序.未接通三相电网电压前LCD上会一直显示缺相,直到接通三相电后才会进行端口的信号检测.如果检测结果符合电动机起动,就会进入到键扫描环节,此环节用于监测到一旦有人工输入的控制信号通过红外遥控输送至控制系统,则可以进入到键处理环节,再由相关子程序对输入的控制信号进行运算处理,等待开始起动;如果检测子程序输出的检测结果不符合电动机起动,则会进入运行中的状态参数显示和突发故障及时处理环节,在故障处理完成后重新检测是否符合电动机起动的条件.系统运行过程中系统的电压、电流等参数会实时显示,供操作人员参考;对系统运行时的突发故障,故障检测程序将及时做出显示并处理.
4 电压空间矢量软起动器样机测试结果
在实验室分别对斜坡升压软起动、电压空间矢量控制软起动做了测试实验,测试实验条件如下:三相AC电源U=380 V、f=50 Hz,电机型号为22KWJO2、转动瞬间的电流Is=88 A,磁粉制动负载,UT207A数字钳形表,记录示波器,万用表.具体的实验数据如表1所示.

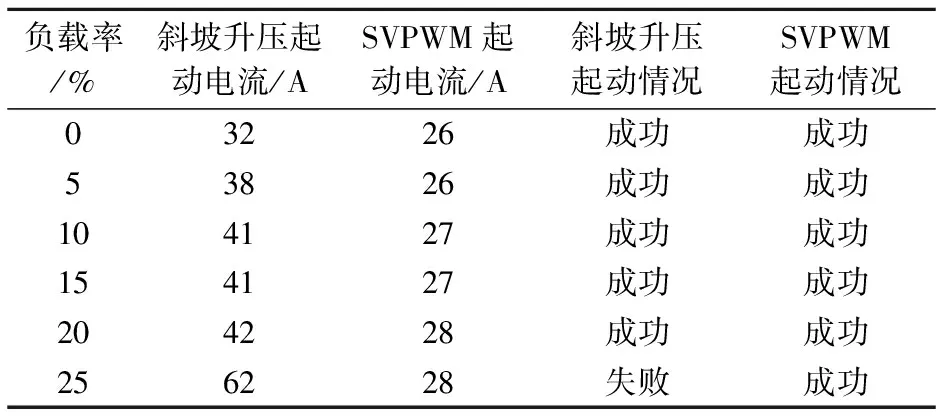
表1 样机测量数据
根据表1中数据看出,本文中所研究的空间电压矢量型软启动器最大的优势在于可以带载启动,这与目前市场上的主流软启动器产品只能空载或轻载(10%负载率以下)启动形成鲜明的对比,作者所设计的软启动器最大可带30%额定负载启动,并且随着研究的深入还有提升的空间,前景很乐观.
5 结论
本文所提的电压空间矢量控制策略与现行的理论依据有所不同,是以变频调速为基础理论依据,以电压空间矢量原理为实现方法.依据这种方法,实现了以往软起动器所不能实现的高起动转矩和低电流的目标.这种以定子磁链轨迹为控制手段和方法的软起动器控制方法在理论上对于软起动器控制来说是全新的控制策略.通过电压空间矢量软起动器转子静止时电机定子电流动态和稳态分析,提出电压空间矢量软起动器的控制策略,然后通过仿真对比,对本文所提方法正确性和可行性进一步验证;最后通过对电压空间矢量软起动器进行相应的软硬件开发,实际电路测试和带电机实验,验证了模型的正确性和理论的有效性.
[1] 冯 惕,王 俭.基于定子电压空间矢量感应电动机的转速控制[J].电工技术学报,2014,29(1):123-130.
[2] 赵 云,刘世琦,李晓明,等.考虑电磁暂态过程的大功率异步电机全压起动方法[J].高电压技术,2013,39(2):464-473.
[3] 胡红明,毛承雄,陆继明,等.分级交-交变频高转矩软起动器的原理和仿真[J].电气传动,2009,39(2):16-19.
[4] Xu Dianguo,Zhao Kaiqi,Wang Yi.Novel method of speed detection and power factor control in thyristor controlled induction induetion motors[J].IEEE,2013,20(7):223-228.
[5] 王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2014.
[6] Shibin Su,Heng Wang,Hua Zhang,et al.Design of discrete variable structure controller based on variable boundary layer[C]//Proceedings of 2010 International Conference on Computer Mechatronics Control and Electronic Engineering.Changchun:IEEE,2010:474-477.
[7] 杨 波.基于STM32的异步电机重载软起动器的研制[D].陕西:陕西科技大学,2013.
[8] 孟彦京,宫文展.智能软起动器控制系统的硬件设计[J].微特电机,2012,40(1):64-72.
[9] 孟彦京,张陈斌,陈 君,等.一种用于软起动的电压空间矢量控制装置及其控制方法[P].中国专利:CN103633910A,2014-03-12.
[10] 孟彦京,高筱筱,李林涛,等.基于STM32的软起动器程序设计[J].电子器件,2013,36(5):685-689.
[11] 戴圣伟,王 欣,李燕林,等.三相异步电机的智能软起动[J].电机技术,2012(10):30-32.
[12] 刘 东,黄 进,于文卷,等.空间矢量PWM多相变频调速系统非正弦供电技术[J].电机与控制学报,2010,14(9):41-47.
[13] 肖义平,袁佑新.基于可变电抗的重载分级变频软起动研究[J].电力电子技术,2011,45(3):106-108.
[14] 樊立萍,张 亮.异步电动机的模糊软起动仿真[J].电力系统及其自动化学报,2011,23(3):123-126.
[15] 樊立萍,胡文浩.组合滤波功能的异步电机软起动研究[J].电气传动,2011,41(9) :61-64.
[16] 曹 沛,吴 雷,张兴进,等.一种基于自关断器件的新型软起动器[J].电力电子技术,2011,45(10):49-51.
[17] Jishun Jiang,Lina Liu.Study of a new type high power motor intelligent soft start controller[C]// 2010 International Conference on Digital Manufacturing and Automation.Changsha: IEEE Computer Society,2010:436-439.
[18] Enginobuz G.,Cadirci I.,Ermis M.,et al.Soft starting of large induction motors at constant current with minimised starting torque pulsations[C]// 35th IAS Annual Meeting and Wolrd Conference on Industrial Applications of Electrical Energy.Ankara:IEEE,2000:1 593-1 604.
【责任编辑:陈 佳】
The research of soft starter based on SVPWM
CHEN Jing-wen, ZHANG Dong
(College of Electrical and Information Engineering, Shaanxi University of Science & Technology, Xi′an 710021, China )
The traditional regulating speed and voltage soft starter based on motor steady-state mathematical model are universal existence in starting torque is small but large current,and the starting torque and starting current nonlinear.Therefore,this paper puts forward a kind of the variable frequency theory as the foundation,based on the theory of voltage space vector (SVPWM) method,and the further study of the stator flux linkage locus as control means and methods,on the basis of design a hexagon flux trajectory of voltage space vector control strategy of a new type of soft starter.The voltage/frequency ratio is relatively stable,the main magnetic flux of motor is stable,at the same time,to achieve a larger starting torque and ensure low starting current.Finally has carried on the corresponding to the designed device experimental test,the test results verify the correctness and effectiveness of the control strategy.
SVPWM; soft start; control strategy; system research and design
2016-10-10 基金项目:国家自然科学基金项目(51577110); 陕西省科技厅工业科技攻关计划项目(2015GY074)
陈景文(1978-),男,内蒙古赤峰人,副教授,研究方向:电力电子与电力传动
1000-5811(2017)02-0171-06
TM921.2
A
