一种基于Duffing方程微弱信号检测的盲域消除方法
2017-04-08赵志宏杨绍普
赵 波, 赵志宏, 杨绍普
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
一种基于Duffing方程微弱信号检测的盲域消除方法
赵 波, 赵志宏, 杨绍普
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
目前微弱信号的检测大多适用于特定频率的信号,效率低,而且忽略了待测信号初始相位对检测效果的影响,存在盲域,精度低等缺点。针对这种情况,提出了一种高效率、高精度的盲域消除法和变尺度法结合的新方法。即使用一组确定的参数,在分析初始相位对检测效果的影响下,构造检测方程组,来检测未知的微弱信号。通过实例验证,相比以前的检测方法,此方法的检测精度更高,且简洁高效。
Duffing方程;盲域消除;微弱信号
0 引言
针对微弱信号的检测,传统的方法以时域和频域分析为主,例如小波分析和频谱分析[1-4]等方法,要求信号有较高的信噪比,且需要对信号进行预处理,来消除噪声,局限性很大。虽然消噪可以减少噪声的干扰,但是在消噪的同时,也会损失有用的微弱信号。随着非线性动力学的发展和混沌理论研究的深入[5-7],人们开始利用混沌方法来检测微弱信号。尽早发现机械设备的故障,可以避免重大事故的发生。机械设备早期的故障信号是非常微弱的,因此有效地检测出微弱的故障信号具有非常重要的意义。不同的设备具有不同的特征频率。齿轮和轴承是多数机械设备的重要组成零件,也是故障的多发区。齿轮的振动频率和齿数、转速和重叠系数有关,出现故障时会产生新的频率成分,这些都称为齿轮的特征频率。早期故障频率相对于其它的特征频率是非常微弱的,因此若是能够从振动信号中检测出微弱的具有特征频率的故障信号,就可以诊断出机械设备的故障[8]。由于混沌系统对参数的极其敏感性和对噪声的免疫性,文献[9]利用典型的Duffing混沌方程,说明了混沌系统检测微弱信号的原理,文献[10]研究了混沌对微弱信号的放大原理,并通过数值仿真和电路模拟,验证了微弱信号非线性放大的优越性。文献[11]更进一步地研究了混沌振子在检测微弱信号时的可靠性。文献[12]分析了噪声对基于Duffing方程弱信号检测的影响,说明了混沌振子对噪声的免疫性。文献[13]研究了耦合振子对微弱周期信号的敏感性和对噪声的免疫力。文献[14]研究了混沌吸引子某方面的特征量,具有量化微弱故障信号的优越性。因混沌系统对待测信号的信噪比要求比较低[11],这种混沌检测方法相对传统的检测方法,具有不失真和高精度的优点。因此利用此方法检测微弱信号具有重要意义。但是,由于混沌系统对初始值的敏感性[15],使得系统只能检测特定频率的信号。若检测未知频率的信号,需要通过改变方程的参数来进行检测。但混沌系统对参数的变化非常敏感,改变参数会增加很大的工作量,效率低下。另外由于摄动信号初始相位的影响,信号检测存在盲域。针对目前检测方法效率低、精度低的缺点,提出了一种新的基于Duffing微弱信号检测的盲域消除方法,即构造出检测方程组,只需改变一个参数来检测未知频率的微弱信号。相比传统方法,此方法的检测范围大,而且没有检测盲区,另外通过数值仿真,分析了驱动信号初始相位对阈值的影响,可通过改变驱动信号的幅值来消除这种影响,使检测精度更高。
1 待测信号初始相位对检测的影响
典型的Duffing方程具有如下形式
(1)
式中,k为阻尼比;-x+x3为非线性恢复力项;Adcos(t)驱动信号;s(t)为检测的微弱信号;n(t)为噪声信号。作为典型的混沌方程,Duffing方程具有对初始条件的敏感性,这可以等价于对方程驱动信号的幅值Ad的敏感性。由于非线性恢复力项的存在,Duffing方程有复杂的动力学特性,通过系统相图的改变来判断待测的微弱信号是否存在。
目前检测的微弱信号都是假设未知信号相位为零的情况下,实际生活中几乎没有这种理想的信号,所以此方法存在误差,因此有必要研究待测信号的初始相位对检测系统的影响。
1.1 在不考虑驱动信号初始相位时的检测效果
假设系统的阻尼K=0.5,则临界幅值Ad=0.825,摄动信号幅值为0.8,驱动信号的初始相位为α,待测信号有初始相位φ,待测信号幅值h=0.06,其中α,φ∈[-π,π],则Duffing方程(2)具有如下形式
(2)
如果仅分析φ对检测性能的影响,可以假设α=0,对Duffing方程(2)右端的两项进行简化得到
(3)
式中,θ=arctan[hsinφ/(0.8+hcosφ)]。
式(3)可以看做是初始方程的驱动项,摄动项的初相为θ,在不考虑θ的情况下,对检测系统进行分析。对检测系统的临界幅值几乎没有任何的影响,只是影响轨迹解的初始位置,因此可以不予考虑。对检测效果产生的影响可以进一步表示
(4)
若满足方程(4)则系统相图发生相变,系统动力学特性由混沌向大尺度周期转变,即可以证明与驱动信号具有相同频率的微弱信号的存在。反之系统相图没有发生转变,则就检测不到待测的微弱信号。若假设待测信号的幅值h=0.06,因为0.8+0.06>Ad=0.825理论上讲是可以检测到的。简化方程(4)可以得到
(5)
带入具体数值可得,当-67.314°<φ<67.314°这能够使Duffing方程从混沌向大尺度周期状态转化,数值实验结果表明,当φ=67.314°时,检测的相图如图1所示,系统处于混沌状态。当φ=67°时,相图如图2所示,系统处于大尺度周期状态。结果表明实验验证与理论结果相差不大。为了使检测结果更加精确缩小φ的取值范围-67°<φ<67°,即认为待测信号的初相位与摄动信号的初相位的相位差在此范围内时,待测信号可以被检测出来。当h>0.06时,由式(5)可知φ的取值范围也要增大,显然-60°<φ<60°的取值范围,同样满足h>0.06的幅值所有情况。
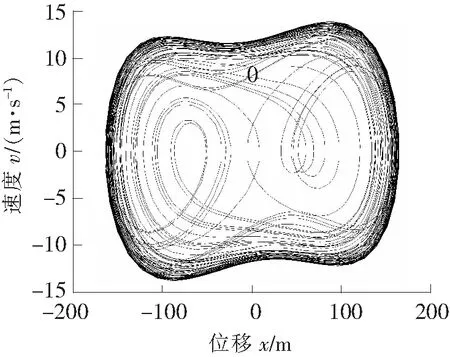
图1 φ=67.413°时的相图
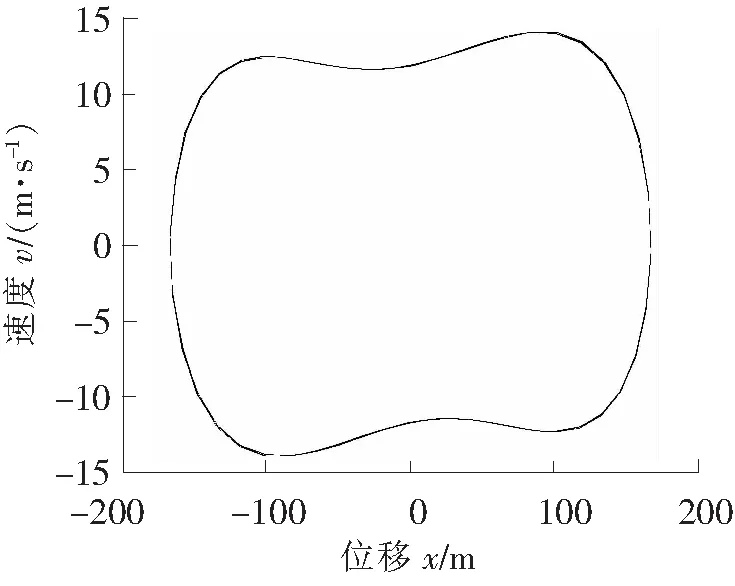
图2 φ=67°时的相图
1.2 考虑驱动信号初始相位对检测效果的影响
下面就α≠0的影响进行分析。为了不失一般性,将Duffing方程等号右边的两项化为
(6)

根据仿真结果做图4。可以看到,随着初相的不同,由方程(6)的分析可知,检测系统临界阈值会有一定程度的改变。当α=0或α=π时,由仿真可知系统的阈值稍微有些改变,但是与α取其它值时相比,变化相对很小,这与上文的分析结果一致,所以当α=0或α=π时,系统阈值变化最小,系统的检测精度最高。
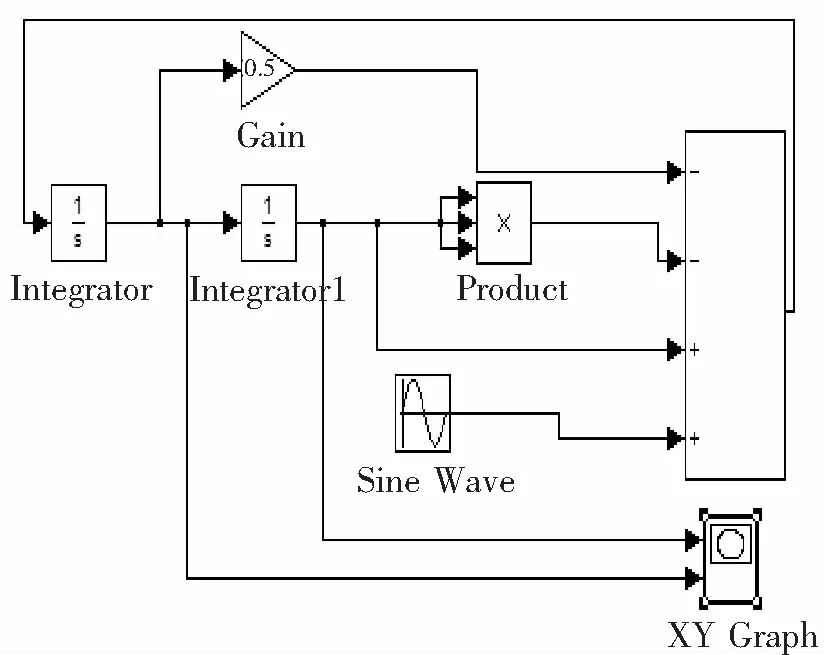
图3 Duffing方程的Simulink仿真模型
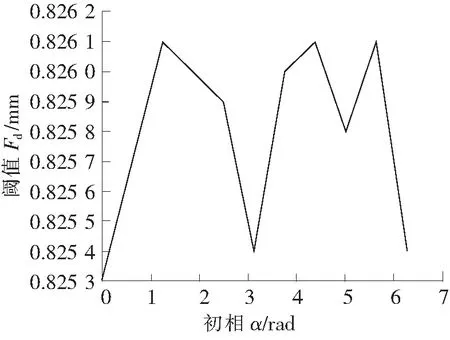
图4 初相和阈值的关系
2 盲域消除法
从式(4)可知,实际情况中φ∈[-π,π],而当幅值h≥0.06的待测信号,只有φ∈[-π/3,π/3]能够被检测出来,也就是说满足这一幅值条件的待测信号,被检测出来的概率只有33.3%,显然误差太大,有66.7%的概率检测不出来[16]。为了消除这种影响,就将方程(2)变为
(7)
(8)
通过式(7)可知,可以通过改变摄动信号初相α使φ-α处于可检测区域,则未知信号可以被检测出来。即通过改变α的值,使待测信号的初始相位位于检测区域,来达到消除盲域的目的。在方程(2)中取α=π/2则φ-α∈[-π/3,π/3],即φ∈[-π/6,5π/6]。同样在方程(7)中取α=π/2,则可以得到φ-α∈[-π,-2π/3]∪[2π/3,π],即φ∈[-5π/6,-π/6]。
从上面的分析可知,当检测幅值h≥0.06的待测信号时,可以分别使α=0,α=π/2分别代入到方程(2)、(7)中得到4个方程,这4个方程覆盖的范围为[-π,π]的整个区间,因此只要有一个方程的相图发生改变,即可认为有待测的信号。所以,可以构建一个方程组来达到消除检测盲域,进而检测未知频率的微弱信号。
3 实例验证
通过分析可知,在检测未知频率的待测信号时,可以将盲域消除法和变尺度法[17]进行结合,并通过构造检测方程组,消除传统方法检测未知信号时的缺点。下面通过实例来验证此方法的可行性。
假设未知信号s(t)=0.002cos(5t+80°),在传统方法中不考虑驱动信号的初始相位对检测阈值的影响,其构造的检测方程组为

利用式(9)检测待测信号,利用变尺度系数法,重点是对比待测信号初始相位对检测效果的影响,因此利用文献[16]的方法直接采用变尺度系数R=5,其方程检测相图分别对应图5、图6、图7、图8所示。
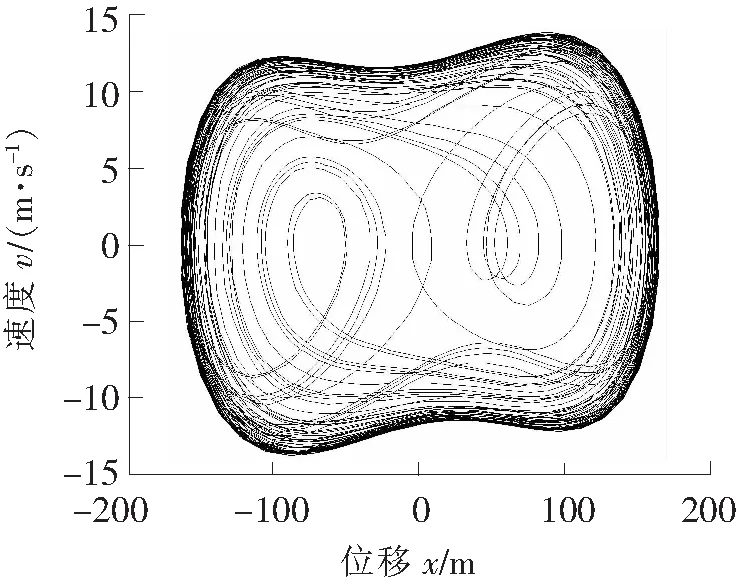
图5 方程(9a)的相图
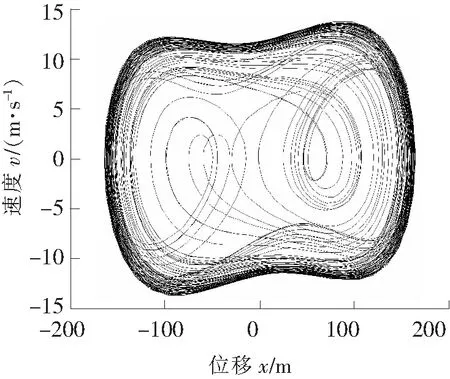
图6 方程(9b)的相图
图7 方程(9c)的相图
图8 方程(9d)的相图
考虑到摄动信号初相对阈值的影响,当α=0时,Fd=0.826;当α=π/2时,Fd=0.827。所以构造方程组时,当α取不同的值时,驱动信号的幅值也应相应的改变,这样可以在一定程度上消除初相对检测效果的影响,其检测方程组为
图9、图10、图11、图12分别对应式(10)的4个相图。由相图的变化可知,利用式(10)检测时,信号可以被检测出来。理论上利用式(9)也可以检测出来,但是,由于式(9)中没有考虑到驱动信号初始相位对检测阈值的影响,所以没有检测出待测信号。因此相比传统方法,新方法检测准确度更高。

图9 方程(10a)的相图
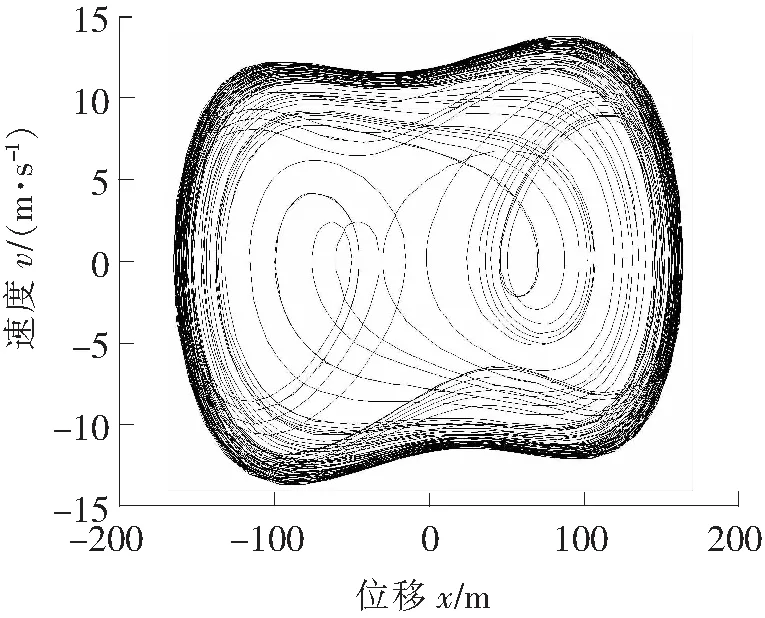
图10 方程(10b)的相图
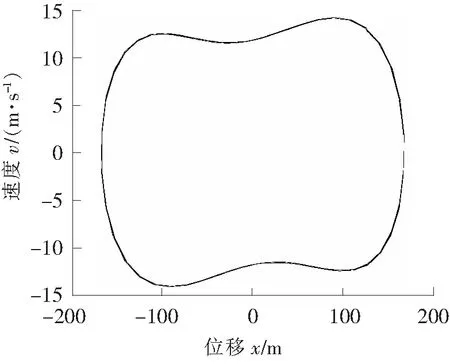
图11 方程(10c)的相图
图12 方程(10d)的相图
4 结论
经实例验证,利用Duffing方程可以很好检测出微弱的未知信号。通过盲域消除法和变尺度法的结合,构造新的检测方程组,利用新的检测方程组和传统的检测方程组对比,可以发现新的检测方程组比传统的检测方法准确度更高。此方法只需通过改变变尺度系数就可以达到只改变一个参数来检测方程的高效率检测方法,另外利用方程初始相位的改变,来达到消除检测盲域,相比传统的检测方法,既高效又准确。但是此方法忽略了噪声对检测效果的影响,有待进一步研究。
[1]周小勇,叶银忠. 小波分析在故障诊断中的应用[J]. 控制工程,2006(1):70-73.
[2] Wang X Y, Fu Z K. A wavelet-based image denoising using least squares support vector machine[J]. Engineering Applications of Artificial Intelligence, 2010, 23(6): 862-871.
[3] Hassani H, Xu Z, Zhigljavsky A. Singular spectrum analysis based on the perturbation theory[J]. Nonlinear Analysis: Real World Applications, 2011, 12(5): 2752-2766.
[4] 孙英侠,李亚利,宁宇鹏. 频谱分析原理及频谱分析仪使用技巧[J]. 国外电子测量技术,2014(7):76-80.
[5] 陈予恕,曹登庆,吴志强. 非线性动力学理论及其在机械系统中应用的若干进展[J]. 宇航学报,2007(4):794-804.
[6] 王俊国,周建中,付波,等.基于Duffing振子的微弱信号混沌检测[J]. 电子器件,2007(4):1380-1383.
[7] Metzger M A. Applications of nonlinear dynamical systems theory in developmental psychology: Motor and cognitive development[J]. Nonlinear Dynamics, Psychology, and Life Sciences, 1997, 1(1): 55-68.
[8]孟涛, 廖明夫. 齿轮与滚动轴承故障的振动分析与诊断 [D]. 西安: 西北工业大学, 2003.
[9] 朱斌. 基于混沌理论的微弱信号检测[J]. 电子科技,2010(2):65-67.
[10] 赵文礼,夏炜,刘鹏,等. 基于混沌理论的微弱信号放大原理与方法研究[J]. 物理学报,2010(5):2962-2970.
[11] 谢涛,魏学业. 混沌振子在微弱信号检测中的可靠性研究[J]. 仪器仪表学报,2008(6):1265-1269.
[12] 兀旦晖,李秦君,杨萍. 噪声对基于Duffing方程弱信号检测的影响研究[J]. 计算机测量与控制,2010(1):61-63.
[13] 王晓东, 杨绍普, 赵志宏. Duffing 振子和 Van der Pol 振子耦合的动力学行为分析[J]. 石家庄铁道大学学报: 自然科学版, 2015, 28(4): 53-57.
[14] 顾晓辉, 刘永强, 杨绍普, 等. 基于混沌吸引子特征量的滚动轴承故障诊断[J]. 石家庄铁道大学学报: 自然科学版, 2015,28(1): 91-95.
[15] 梁坤,宋立新. 利用混沌理论进行微弱信号测量系统的参数分析[J]. 哈尔滨理工大学学报,2007,12(4):66-69+73.
[16] 牛德智,陈长兴,班斐,等.Duffing振子微弱信号检测盲区消除及检测统计量构造[J]. 物理学报,2015,06:71-83.
[17] 赖志慧,冷永刚,孙建桥,等.基于Duffing振子的变尺度微弱特征信号检测方法研究[J]. 物理学报,2012(5):60-68.
A Kind of Weak Signal Detection of the Method Based on
Duffing Equation to Eliminate Blind Domain
Zhao Bo, Zhao Zhihong, Yang Shaopu
(School of Mechanical Engineering,Shijiazhuang Tiedao University,Shijiazhuang 050043,China)
Presently, the detection of weak signals is only applicable to the specific frequency of the signal, and moreover, the effect of the initial phase of the measured signals is ignored. This method has low detection efficiency and has a blind area. In view of this situation, this paper uses a new method of combination of blind area elimination method and variable scale method which is of high precision and high efficiency. Based on the analysis of the influence of the initial phase on testing effect, a set of definite parameters are used and detecting equations are structured to detect the unknown weak signal. Verified by examples,this detection method is more accurate, more simple and more efficient than before.
Duffing equation;eliminate blind domain;weak signal
2016-04-15 责任编辑:车轩玉
10.13319/j.cnki.sjztddxxbzrb.2017.01.11
河北省研究生创新项目(yc2016003)
赵波(1991-), 男,硕士研究生,主要从事故障诊断的研究。E-mail: 386547260@qq.com
O415.5
A
2095-0373(2017)01-0058-06
赵波,赵志宏,杨绍普.一种基于Duffing方程微弱信号检测的盲域消除方法[J].石家庄铁道大学学报:自然科学版,2017,30(1):58-63.
