空间划分的目标图像识别与跟踪技术
2017-04-07张学英韩广良
张学英, 韩广良
(1. 河北科技师范学院 职教研究院, 河北 秦皇岛 066004;2. 中国科学院 长春光学精密机械与物理研究所, 吉林 长春 130000)

空间划分的目标图像识别与跟踪技术
张学英1, 韩广良2
(1. 河北科技师范学院 职教研究院, 河北 秦皇岛 066004;2. 中国科学院 长春光学精密机械与物理研究所, 吉林 长春 130000)
针对多目标识别跟踪算法中存在的低效率、高能耗,易产生误检、漏检等问题,以跟踪精确率、能量损耗为评价指标展开研究.对目前定位与跟踪的相关算法进行分析,提出一种基于空间划分的目标图像识别与跟踪算法.利用空间分簇机制,实时收集目标的位置信息,同时,建立目标丢失与恢复机制,显著提高了目标的识别与跟踪精度,减少能量损耗.结果表明:与常规算法相比,所提算法跟踪成功率提高了10%左右,并能有效减少能量消耗,具有一定的实用价值. 关键词: 空间划分; 图像识别; 图像定位; 跟踪算法; 分簇机制
物联网通过射频识别、红外感应器等设备将现实世界中的各个事物联系起来,按约定的协议进行信息交换和通信,以实现对物品的智能化识别.物联网是互联网的延伸和扩展,广泛地应用于目标识别与定位跟踪领域.目前,研究人员提出了许多行之有效的目标定位和跟踪算法.王栋等[1]基于Random ferns的特征描述方法,提出一种采用背景补偿引导的动态场景目标跟踪算法,从而解决了在动态场景下进行运动目标跟踪时易出现误差累积导致跟踪失败的问题.程宪宝[2]提出利用一个具有群间相互动态信息的多群社会模型改进简化群优化算法,通过粒子和群的多样化,引入运动预测到多群的粒子群算法(SSO),在拥挤的场景中跟踪多个目标具有更高精度.Yazdian-dehkordi等[3]基于统计学理论,提出一种重定义的混合高斯概率密度函数的多目标跟踪器,利用高斯混合模型拟合重采样后的粒子分布,提高了目标的跟踪精度.郑玉凤等[4]利用颜色特征对变形不敏感和边缘特征对光照、颜色不敏感的特点,提出一种基于颜色和边缘特征的均值迁移目标跟踪算法,提高了跟踪算法的鲁棒性.王国良等[5]基于粒子滤波理论,提出一种多自由度运动目标的稳健跟踪算法,以实现复杂背景下跟踪视频序列中的多自由度运动目标.通过分析发现,目前大多数研究都致力于解决具有一定运动规律的目标跟踪问题,若目标的运动轨迹具有不确定性,则识别和跟踪的精度将受到很大影响[6-8].针对这个问题,本文提出一种空间划分的目标图像识别与跟踪技术.
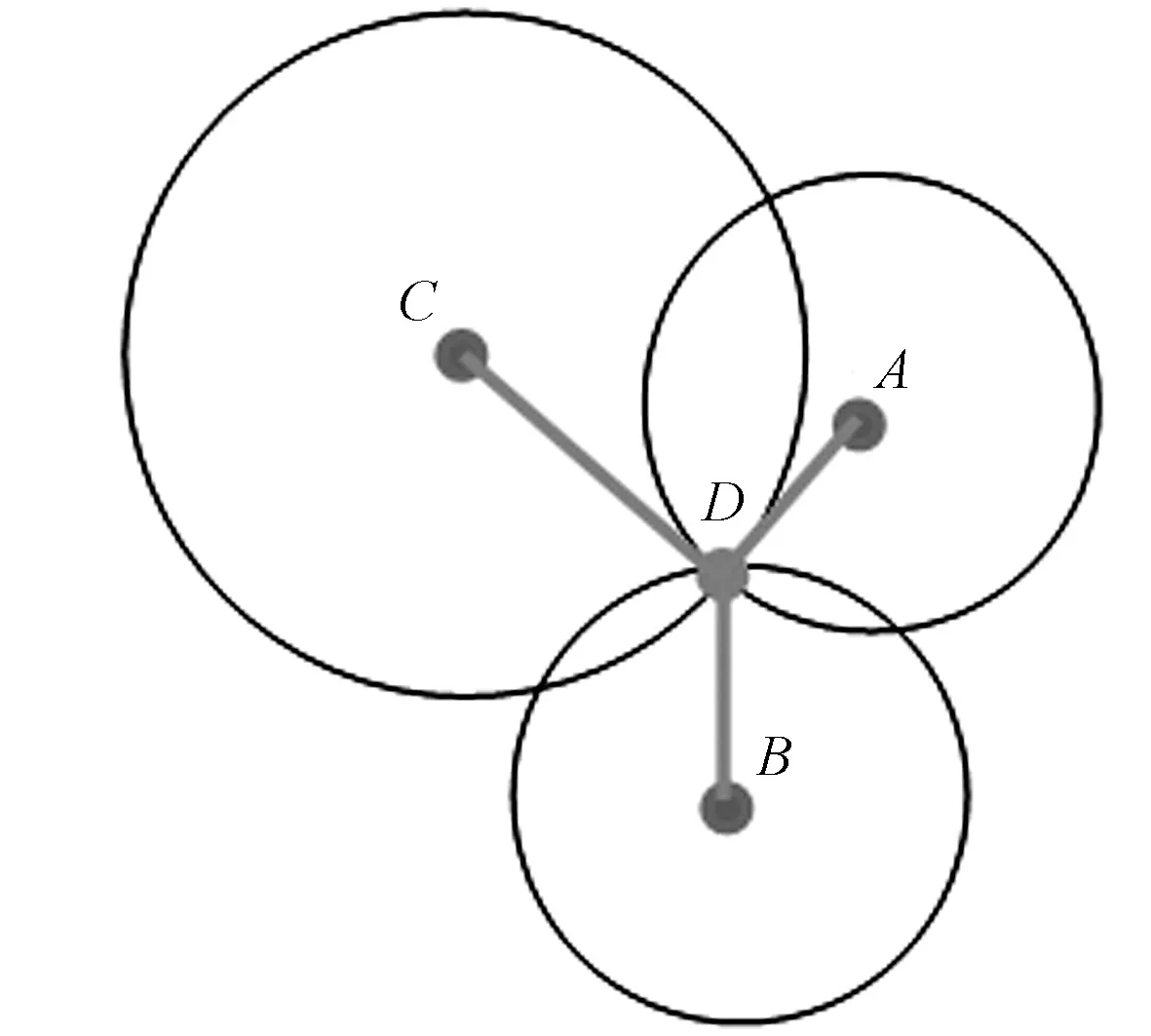
图1三边测量法 Fig.1 Three sides detection algorithm
1 目标识别与跟踪的相关理论
1.1 定位方法
1) 三边测量.三边测量是一种通过测量目标点和已知点距离确定目标位置的过程[9].如果信标节点(坐标已知的节点)和目标节点(坐标未知的节点)之间的距离可以通过测量得到,以信标节点为中心,以二者距离为半径,画出3个定位圆,则目标节点的位置即为定位圆之间的交点,如图1所示.
如果已知A,B,C节点坐标分别为(xA,yA),(xB,yB),(xC,yC),与目标节点D之间的距离是sA,sB,sC,则D(x,y)的坐标为
(1)
2) 到达时间(TOA)方法.TOA方法是通过信号的传输时间估计目标节点和信标节点之间的距离[10-11].在基于 TOA 的定位系统中,使用超声波信号作为测距信号.TOA 定位包括测量至少3个信标节点的到达时间,然后,使用三角测量方法计算目标节点的位置.信标节点和目标节点之间的距离为
(2)

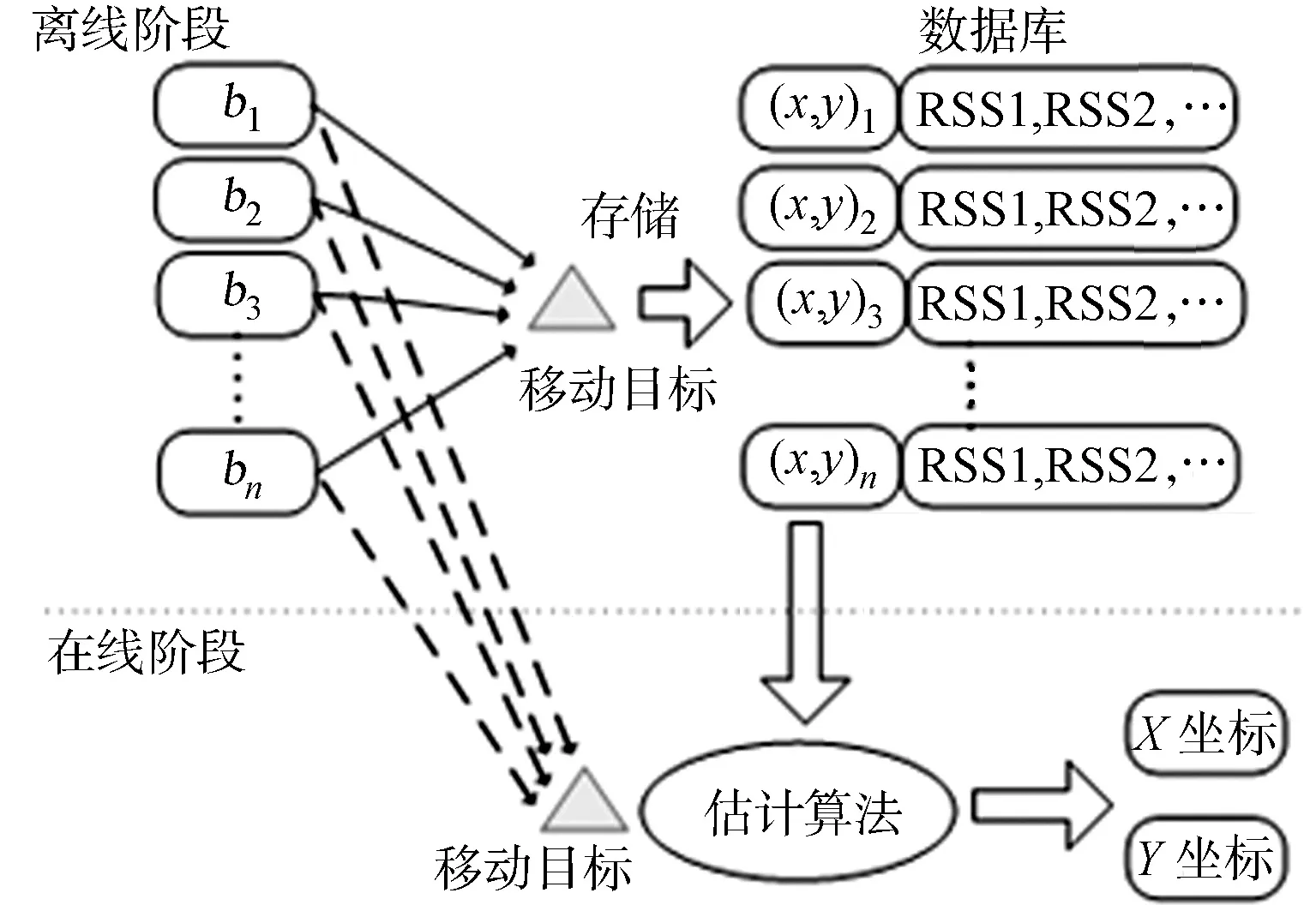
图2 场景指纹定位法Fig.2 Scene fingerprint location algorithm
3) 场景指纹定位.场景指纹定位主要用于确定每个节点的信号被接收的方式,包括离线阶段和在线阶段两部分,如图2所示.在离线阶段,测量移动目标在不同位置上的信号强度,并把收集到的信号强度值及相应的位置坐标存储于数据库.在在线阶段,移动目标收集来自其信号作用范围内的信标节点的信号强度值,然后,把这些信息发送给服务器,服务器使用相应的算法估计移动目标的位置.
1.2 定位算法评价标准
1) 定位精度.定位精度是衡量算法有效性的指标,目标节点的预测位置与实际位置越接近,定位精度越高,通常用平均定位误差与节点通信半径的比值表示[12],即
(3)
式(3)中:μ为定位误差;m,m′为定位结果与未知结果;n为未知节点个数;R为节点的通信半径.
2) 能耗与成本.受硬件条件影响,传感网络的寿命是其必须面对的一个难题,所以在设计传感网络算法的时候,必须考虑能耗这个影响因素.能耗过高,寿命减小,使网络成本增加,定位的价值下降.
3) 锚节点密度.锚节点在所有节点中所占的比例称为锚节点密度.锚节点通常由人工部署或全球定位系统(GPS)自动获取位置信息.一般而言,锚节点数量越多,定位效果越好.然而,锚节点数量的增加也会使网络的开销和成本增加.因此,在设计锚节点密度时,必须根据实际情况设定.
1.3 跟踪方法
1) 信息驱动协作跟踪算法[13-14].该算法是一种基于预测机制的目标跟踪算法,其工作原理为:节点在探测信息的同时,接收其他节点发来的信息,由此判断和预测目标可能运动的方向;然后,将判断结果传给目标可能前进方向上的节点,唤醒该节点准备参与下一阶段的跟踪任务,如图3所示.图3中:圆形区域表示某节点的探测范围,箭头表示目标行进轨迹.当目标位置变化时,总有一个节点在目标的附近对其进行实时定位跟踪.当目标前进时,该节点会将信息传递给相邻的某个节点,将其唤醒,继续对目标进行跟踪.由此可见,在整个网络上,只有少量的节点参与对目标的识别与跟踪任务,从而减小网络的能源消耗,节约成本.
2) 传送树跟踪算法.该算法通过局部信息交换实现目标的跟踪,其工作原理为:当节点监测到目标以后,在一定范围内,通过特定的选举算法,选举出一个树根节点,由其构造出传送树;然后,由树根结点向其他节点传送目标运动信息.在传送树中的其他节点会按一定周期给根节点发送跟踪信息,树根节点将收到的信息进行数据融合处理,并将处理结果发送到汇聚节点.当目标运动时,传送树内部节点会发生变化,那些距离目标越来越远的节点不断被删除,同时,唤醒新节点加入传送树,如图4 所示.传送树跟踪算法能保证对目标的高效跟踪,大大减少通信开销.
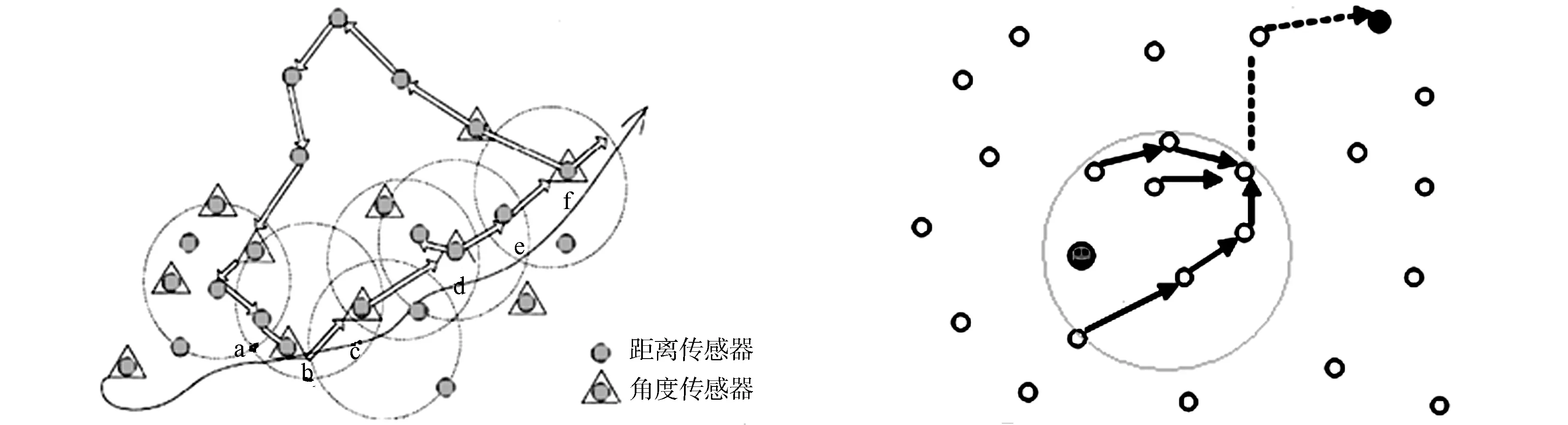
图3 信息驱动协作跟踪算法 图4 传送树跟踪算法Fig.3 Information driven cooperation tracking algorithm Fig.4 Dilivery tree tracking algorithm
2 目标图像识别与定位跟踪技术
目前,常见的目标识别与跟踪技术大多针对二维平面场景,且存在算法复杂、高能耗、精度低等问题,当目标路线不规律时,跟踪丢失率大大增加[15-16].对于三维目标跟踪算法的研究还处于起步阶段,成果较少.基于此,在三维应用场景环境下,提出一种基于空间划分的目标图像识别与跟踪算法.
2.1 空间分簇机制
能耗是目标定位与跟踪算法的一个重要指标,因此,设计一种高效的节点协作管理机制是减少能耗的最有效途径.只让少数检测到目标的节点参与跟踪过程,让其他没有检测到目标的节点进入休眠状态,从而最大限度降低网络的能耗,节约成本,延长系统寿命.基于这个目标,提出一种空间分簇机制,其基本理念是对网络中的所有节点进行分组,各节点根据相邻关系自动组织成簇;然后,通过一定的算法选举出簇头,用以协调组内节点间的信息融合及传递.簇成员负责执行跟踪任务,将监测到的目标位置信息实时传送给簇头节点,簇头节点收集簇成员发送过来的监测目标信息,并进行加工融合处理.簇头由各个簇成员节点之间随机轮流担当,以此平衡簇间能量的消耗,延长整个簇的生命周期.通过这种空间分簇机制可大大缩短信息的传输路径,进而降低通信能耗,达到网络节能的目的.
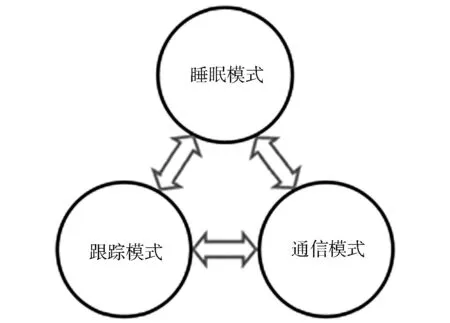
图5 节点工作模式转换图Fig.5 Node work-mode transformation
2.2 工作模式
空间分簇算法中各节点都包括睡眠、跟踪和通信3种工作模式.睡眠模式中,所有模块功能均关闭,只能通过自身定时器唤醒,此时,没有能量消耗;通信模式中,感知模块关闭,通信模块处于待机状态,可被其他节点唤醒;跟踪模式中,通信、感知等模块均开启,节点处于跟踪与传输信息状态.3种工作模式可相互转换,如图5所示.
在基于空间划分的目标定位与跟踪开始阶段,探测任务将由边界簇头担任,普通簇头处于通信模式,簇头可以随时对其唤醒.当有目标进入网络后,边界簇头会立即发现目标并进行识别,同时,开始节点睡眠调度,为后续跟踪提供保障.此时,其他组内的节点都处于睡眠模式,并按一定周期苏醒,向簇头发出信息,询问是否有跟踪任务,若有,则转为通信模式,若无,则继续睡眠.
2.3 目标丢失与恢复机制
通常移动目标的运动状态并不完全固定,运动方向、运动速度可能会发生突然变化,导致目标脱离当前的监控区域,如图6所示.由图6可知:网络节点预测目标的运动方向向右,但目标的实际运动方向变成了右下方,这种情况即目标丢失.为了重新找到目标,基于空间划分的物联网目标定位与跟踪算法提出相应的目标恢复机制.当目标进入区域2时,根据轨迹预测目标进入区域 3,区域3内的簇头首先发起探测,发现目标没有进入该区域,则发出信号激活周边范围内的簇头,进行探测,此时,区域6内的簇头发现目标,目标恢复,则通知其他簇头休眠,重新开始跟踪过程,如图7所示.
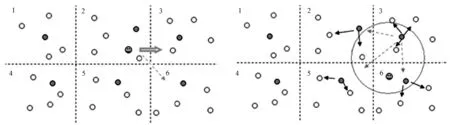
图6 目标丢失 图7 目标恢复 Fig.6 Object loss Fig.7 Object restoration
3 仿真分析
为了验证空间划分识别与跟踪算法的效果,以跟踪准确率(η)和能耗(W)为评价指标,在Matlab 环境下进行仿真分析.建立100 m×100 m×100 m的正方体空间模拟环境,作为对目标的定位与跟踪区域.在该区域内,按一定距离部署500个传感器节点,每个节点的通信半径均设定为8 m.假设目标的移动没有固定的模式,移动速度与移动方向完全随机.为了验证算法的有效性,与传统跟踪方法进行对比,结果如图8,9所示.

图8 跟踪准确率对比曲线 图9 能量消耗对比曲线 Fig.8 Tracking accuracy comparison curve Fig.9 Energy loss comparison curve
由图8,9可知:由于空间划分算法采用联合簇头机制,减少了转换过程中可能出现的目标丢失现象,在提高定位精度的同时,使跟踪准确率有所提高,与普通算法相比,跟踪成功率提高了10%左右.同时,由于目标丢失的次数减少,所以相对普通算法更节省能量消耗.
4 结束语
目标定位与跟踪技术是许多应用的基础,由于目标的运动状态具有随机性,规律难以捕捉,给识别精度与跟踪准确率带来难度.文中对目标识别与跟踪的方法进行了深入分析,并对相应的评价指标进行探讨,提出一种基于空间划分的目标识别与定位跟踪算法,该算法以空间分簇为机制,以睡眠、跟踪和通信为主要工作模式,对目标进行联合跟踪.仿真结果表明:与普通跟踪算法相比,基于空间分簇目标识别与跟踪算法具有更高的跟踪准确率和较小的能量消耗,达到设计预想,可为目标识别与跟踪技术的研究提供参考.
[1] 王栋,朱虹,康凯,等.基于背景补偿引导的动态场景下目标跟踪算法[J].仪器仪表学报,2014,35(6):1433-1440.
[2] 程宪宝.基于多群互动简化群优化的多目标跟踪算法[J].计算机工程,2016,42(3):1-7.
[3] YAZDIAN-DEHKORDI M,AZIMIFAR Z.Adaptivevisual target detection and tracking using weakly supervised incremental appearance learning and RGM-PHD tracker[J].Visual Commum Image,2015,35(2):1-11.
[4] 郑玉凤,马秀荣,赵晓琳,等.基于颜色和边缘特征的均值迁移目标跟踪算法[J].光电子激光,2011,22(8):1231-1235.
[5] 王国良,刘金国.基于粒子滤波的多自由度运动目标跟踪[J].光学精密工程,2011,19(4):864-869.
[6] GRANSTROM K,ORGUNER U.On spawning and combination of extended/group targets modeled with random matrices[J].IEEE Transactions on Signal Processing,2013,61(3):678-692.
[7] 王秉,王子衡.非高斯噪声背景下计算机视觉目标跟踪方法[J].华侨大学学报(自然科学版),2016,37(6):774-777.
[8] 钱志鸿,朱爽,王雪.基于分簇机制的ZigBee 混合路由能量优化算法[J].计算机学报,2013,36(3):485-493.
[9] YAN Zhai,YEARY M B.A new centralized sensor fusion tracking methodology based on particle filtering for power aware systems[J].IEEE Transactions on Instrumentation and Measurement,2008,57(10):2377-2387.
[10] PENG Bao,GU Xuemai,DING Bo.Localization algorithm based on sector scan for mobile wireless sensor networks[J].Applied Mathematics and Information Sciences,2012,6(1):99-103.
[11] 邹永艳,张衍志.WSN 中视觉辅助方案结合TI CC2431 ZPS 平台的跟踪定位方法[J].电信科学,2016,32(9):68-74.
[12] 李珂,李醒飞,杨帆.IMM-UKF算法在两坐标雷达/光电融合跟踪系统的改进与应用[J].激光与光电子学进展,2016,53(12):12250.
[13] HE Tian,VICAIRE P,YAN Ting,et al.Achieving long-term surveillance in vigil net[J].ACM Transactions on Sensor Networks,2009,5(1):1-12.
[14] 田丰,郭巍,刘晓露,等.基于自适应抗差滤波的WSNs节点跟踪算法[J].传感技术学报,2011,24(1):100-105.
[15] 黄建新.室外场景下目标分割和目标识别算法[J].华侨大学学报(自然科学版),2005,26(4):353-355.
[16] 陈宝全,毛永毅.小波分析法解决无线定位跟踪问题[J].电信科学,2013,29(10):98-102.
(责任编辑: 钱筠 英文审校: 吴逢铁)
Target Image Recognition and Tracking Technology Based on Space Partition
ZHANG Xueying1, HAN Guangliang2
(1. Institute of Vocational Education, Hebei Normal University of Science and Technology, Qinhuangdao 066004, China;2. Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130000, China)
Considering multi-object tracking algorithm exists some problem such as low efficiency, high energy loss, easy error-detection and loss dectection, we take the tracking accuracy and energy loss as the evaluation index to develop research. Based on the analysis of the current localization and tracking algorithms, a new method of object localization and tracking algorithm based on space partition is proposed, which uses the spatial clustering mechanism to collect the target location information in real time. At the same time, the object loss and restoration mechanism is established. It can improve the tracking accuracy and reduce the energy loss significantly. The simulation results show that compared with the common algorithm, the tracking success rate in our is increased by 10%, and the energy consumption is decreased effectively in this algorithm effective, and it has application value. Keywords: space partition; image recognition; image location; tracking algorithm; clustering mechanism
10.11830/ISSN.1000-5013.201702023
2017-02-14
张学英(1971-),女,讲师,博士,主要从事多媒体与计算机应用技术的研究.E-mail:tszxy@126.com.
国家自然科学基金资助项目(61172111)
TP 391
A
1000-5013(2017)02-0257-05
