基于自适应波束形成的水下微弱目标检测技术*
2017-04-07张国光
张国光
(昆明船舶设备研究试验中心 昆明 650051)
基于自适应波束形成的水下微弱目标检测技术*
张国光
(昆明船舶设备研究试验中心 昆明 650051)
对水下微弱信号辐射目标的检测是实现水声探测和对潜攻击的关键技术。针对当前的匹配滤波检测方法检测性能不好的问题,提出一种基于自适应波束形成的水下微弱目标检测算法。构建水下微弱目标的反射回波模型,采用二阶自适应格型IIR陷波器进行信号抗干扰滤波处理,采用自适应波束形成算法进行水下微弱目标回波信号的时频聚焦,实现对目标信号的准确检测,最后进行仿真测试,结果表明,采用该方法进行水下微弱目标检测的精度较高,抗干扰性能较好,准确检测概率高于传统方法。
自适应波束形成; 水下微弱目标; 信号检测; 滤波
1 引言
随着智能武器和国防科技技术的发展,智能制武器系统设计成为发现和攻击高速隐蔽运动目标的关键。在自适应智能制导武器系统设计中,需要对运动的水下目标进行有效检测,研究微弱目标的有效检测技术同时也是微电子处理和智能信号处理的基础性工作,信号检测技术是整个制导系统设计的重中之重。研究水下微弱目标检测技术,在水声探测、水中兵器的制导设计以及声呐目标检测等领域具有重要意义[1~3]。
对目标检测主要是对目标的辐射信号进行被动检测或者通过辐射主动脉冲信号,检测目标回波信号,进行目标的主动检测,两种方法分别为主动自导和被动自导模型,近年来,对目标信号的检测技术主要有小波分析方法、时频分析方法等[4~5],小波分析方法成为现代信号处理研究的热点,结合连续小波变换的窄带系统和窄带信号处理方法,构建运动目标宽带模型,采用双曲调频小波检测进行目标信号主动检测和辐射信号的被动检测,成为水下航行器的制导系统设计的关键技术,通过对目标检测可以提高系统对水下高速运动的微弱辐射信号目标的攻击和识别性能,但是传统方法在受到较大的干扰或者无线电静默屏蔽时,对目标的检测精度受到限制[7]。针对上述问题,本文提出一种基于自适应波束形成的水下微弱目标检测算法,构建水下微弱目标的反射回波模型,采用二阶自适应格型IIR陷波器进行信号抗干扰滤波处理,采用自适应波束形成算法进行水下微弱目标回波信号的时频聚焦,实现对目标信号的准确检测,最后进行仿真测试得出有效性结论。
2 水下微弱目标回波信号模型构建 及滤波预处理
2.1 水下微弱目标回波信号模型
为了实现对水下微弱目标回波信号的准确检测,首先需要构建水下微弱目标回波信号采样和信号传输结构模型。结合时间序列分析方法,进行水下微弱目标回波信号的统计分析,水下微弱目标回波信号是一组非线性时间序列,可以采用非线性时间序列分析方法进行特征分析和检测,在时频空间上,目标回波信号具有时频对偶关系[8~12],水下目标回波模型在连续时频空间上参数对偶关系如图1所示。

图1 水下目标回波模型空间参数对偶关系
根据上述对偶关系模型,构建水下目标回波信号结构模型为
x(t)=Re{an(t)e-j2πfcτn(t)sl(t-τn(t))e-j2πfct}
(1)
其中,水下目标的目标回波信号传输的时间尺度脉冲响应可描述为
(2)
式中,an(t)是第n条数据传输信号上进行运动中的目标回波检测的辐射信号,若对目标检测中发射的主动脉冲信号为f(t),目标反射回波g(t),采用双曲调频的信道调制模型,得到目标回波传输的信道模型为
(3)
其中,ai和τi分别是水下目标中目标回波信号传播损失和传递时延,由此得到水下目标中目标回波信号传输模型的特征分布函数为
(4)
通过目标回波信号回波特征的相空间重构,可得目标回波信号异常特征的频谱特征为
(5)
Wy(t,v)=Wx(kt,v/k)
(6)
其中,k表示采样频率,v表示水下目标的带宽,Wx为时间窗口函数,对目标回波模型采用双曲调频小波分析方法进行特征提取,得到回波时延τ为信号采样时间t的函数为
(7)
式中,c为介质中的水下目标的运动速度。通过上述分析,进行了水下微弱目标回波信号模型构建,以此为信号源进行信号滤波和特征检测。
2.2 信号抗干扰滤波预处理
在上述进行了水下微弱目标回波信号模型构建的基础上,进行信号检测。由于信号采集中受到杂波和混响的干扰,导致采集的回波信号具有大量的噪声和混响,需要进行抗干扰处理,设计二阶自适应格型IIR陷波器进行抗干扰滤波,二阶自适应格型IIR陷波器的结构如图2所示。
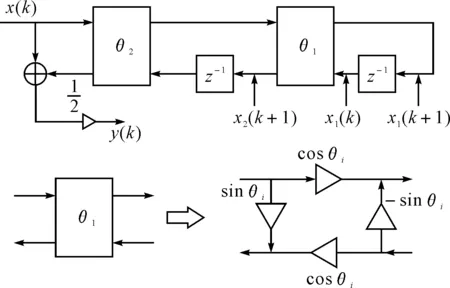
图2 二阶自适应格型IIR陷波器结构框图
图2中,两种陷波器的传输函数[18]:
(8)
(9)
θ1(k+1)=θ1(k)-μRe[y(k)φ*(k)]
(10)
其中,μ是水下微弱目标回波检测的离散时间线性系统收敛控制参数,称为步长;φ(k)是输出期望响应信号y(k)的陷波频率,被称为冲击响应信号,当r→1时陷波器的带宽减小。通过上述分析,得到本文设计的水下微弱目标回波信号滤波的陷波器的传输函数为

(11)
其中
(12)
输入的水下微弱目标回波信号u(k)经过自适应IIR处理,使得输出信号与期望相应之间的误差最小,令d(k)为陷波器幅频响应的输出误差为
(13)
上式两边取数学期望,实现对水下微弱目标回波信号的抗干扰滤波处理,使得均方误差函数的梯度最小,可见输出误差为零,从而实现有效的抗干扰滤波,有利于提高检测精度。
3 自适应波束形成及目标检测技术改进
在上述进行了目标回波信号模型构建及滤波预处理的基础上,进行水下目标检测改进设计。本文提出一种基于自适应波束形成的水下微弱目标检测算法,通过调整反射增益,得到水下微弱目标回波信号标量时间序列定义为
ΦH(t) =A(t)exp[jθ(t)]

(14)
上式中,上角标H表示双曲(Hyperbolic),其与目标的传输特性有关,设计自适应波束形成器:
(15)
其中,a0为初始水下微弱目标回波信号的采样幅值,xn-i为具有相同的均值、方差的目标回波信号标量时间序列,bj为回波辐射回波的振荡幅值。
对水下微弱目标回波信号进行自适应波束加权,得到输出信号的宽带结构模型为
(16)

(17)
式中,γ为目标回波信号时频特征的峰度,h(j)表示与之相对应的对角切片算子,采用小波尺度分解,在不同的小波尺度上进行波束聚焦。由于小波尺度具有时间上的相关性,记小波频率中心为f0,小波频宽为Xθ(t),得到通过自适应波束形成进行信号盲源分离过程描述为
x(t)=ej2πvx(t)t
(18)
vx(t)=v0+2βt
(19)
Yp(u)=Xp(u)+δ(v-(v0+βt))
(20)
在时频空间上,信号的指向性特征为
(21)
通过上述处理,设计自适应波束形成检测器,检测判决式设计为
(22)
采用自适应波束形成算法进行水下微弱目标回波信号的时频聚焦,则水下微弱目标回波信号的相位估计结果为
(23)
通过上述分析,实现了对水下微弱目标的有效回波检测,检测过程实现框图如图3所示。
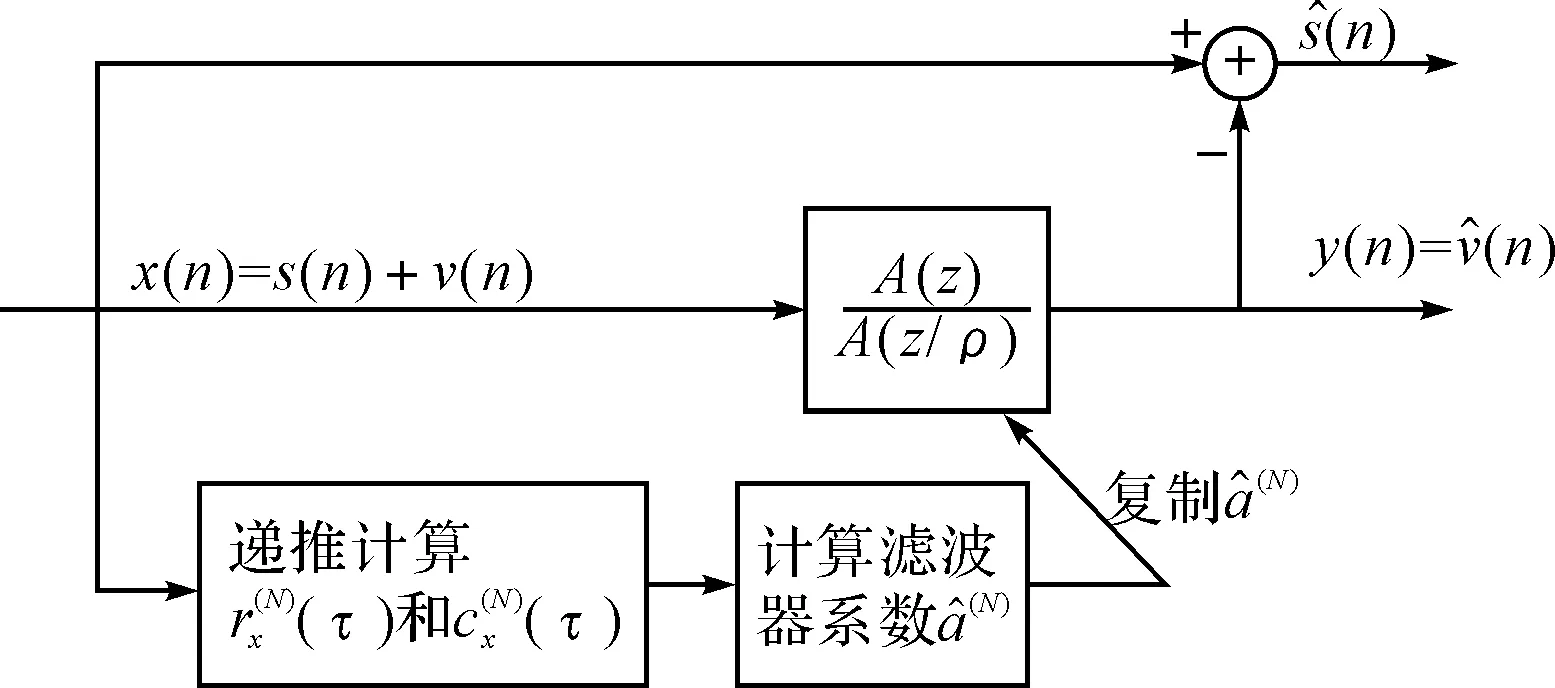
图3 目标检测实现框图
4 仿真实验与结果分析
为了测试本文算法在实现水下微弱目标检测中的应用性能,进行仿真实验,采用Matlab 7数学仿真语言进行算法设计与实现,水下微弱目标回波数据样本测试集采集于某大型水声试验场。水下微弱目标回波样本数据的采集过程中,离散采样率为fs=10*f0Hz=10KHz,样本长度为1024,回波信号样本数为998,回波信号的带宽B=1000Hz。二阶格型陷波器的权重系数μ0=0.001,θ2=0.45π,信号幅值取为A1=A2=A3=1,信号频率取为0.3π,带宽参数ρ=0.96,噪声的谱峰位置选在0.5π处,陷波器初始值选为θ1=-0.3π,即300Hz。目标回波信号训练集为频带4kHz~10kHz、时宽2.4ms的线性调频信号,根据上述仿真环境和参数设定,进行目标检测仿真,首先进行原始的目标回波采样,并进行滤波处理,得到结果如图4所示。

图4 回波采样及滤波的时域波形
从图4可见,采用本文方法进行信号滤波,能有效抑制混响干扰,提高信号检测精度。在此基础上,进行目标检测,采用自适应波束形成算法进行水下微弱目标回波信号的时频聚焦,实现对目标信号的准确检测,得到时频聚焦的模值和谱如图5所示。
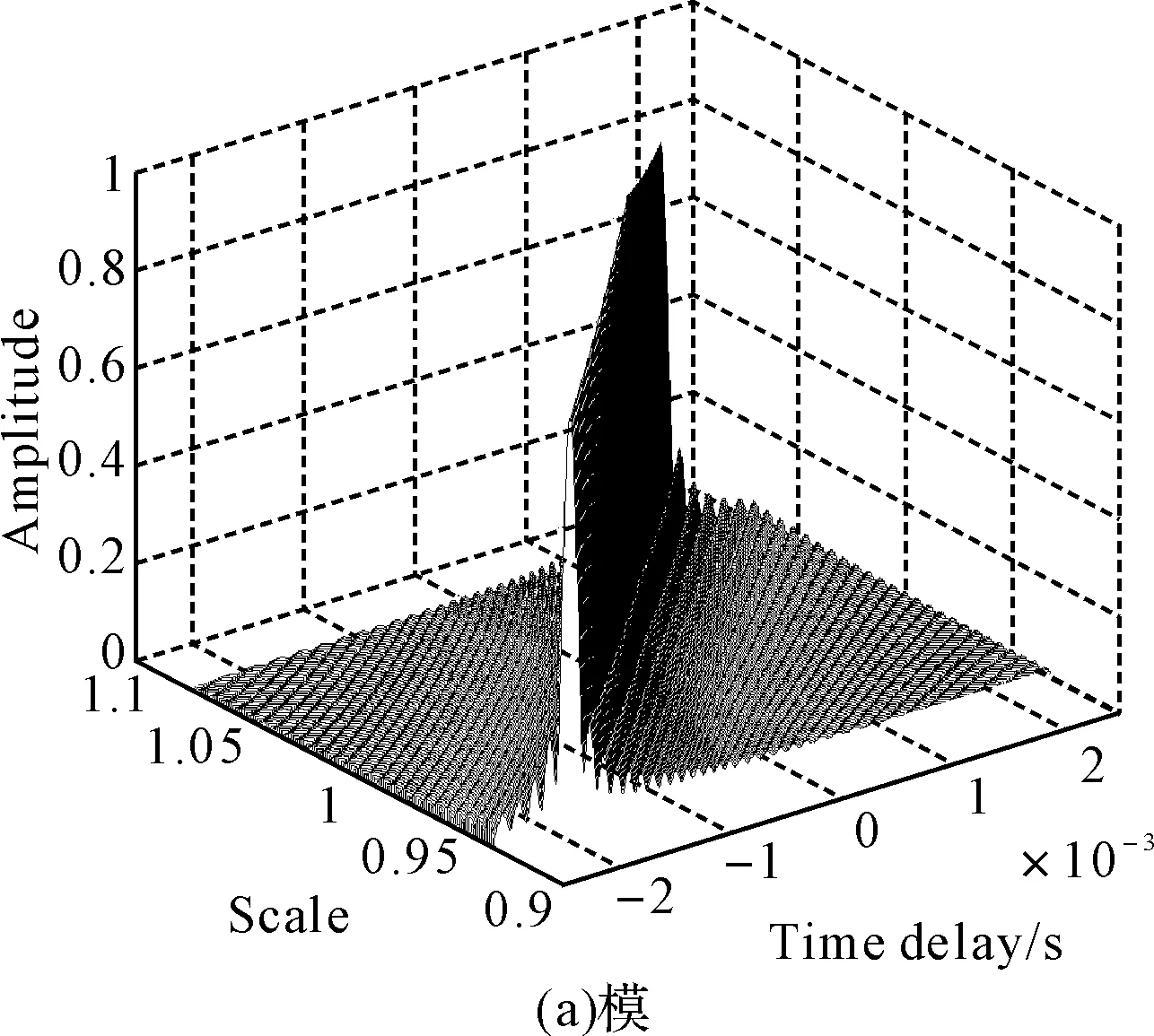
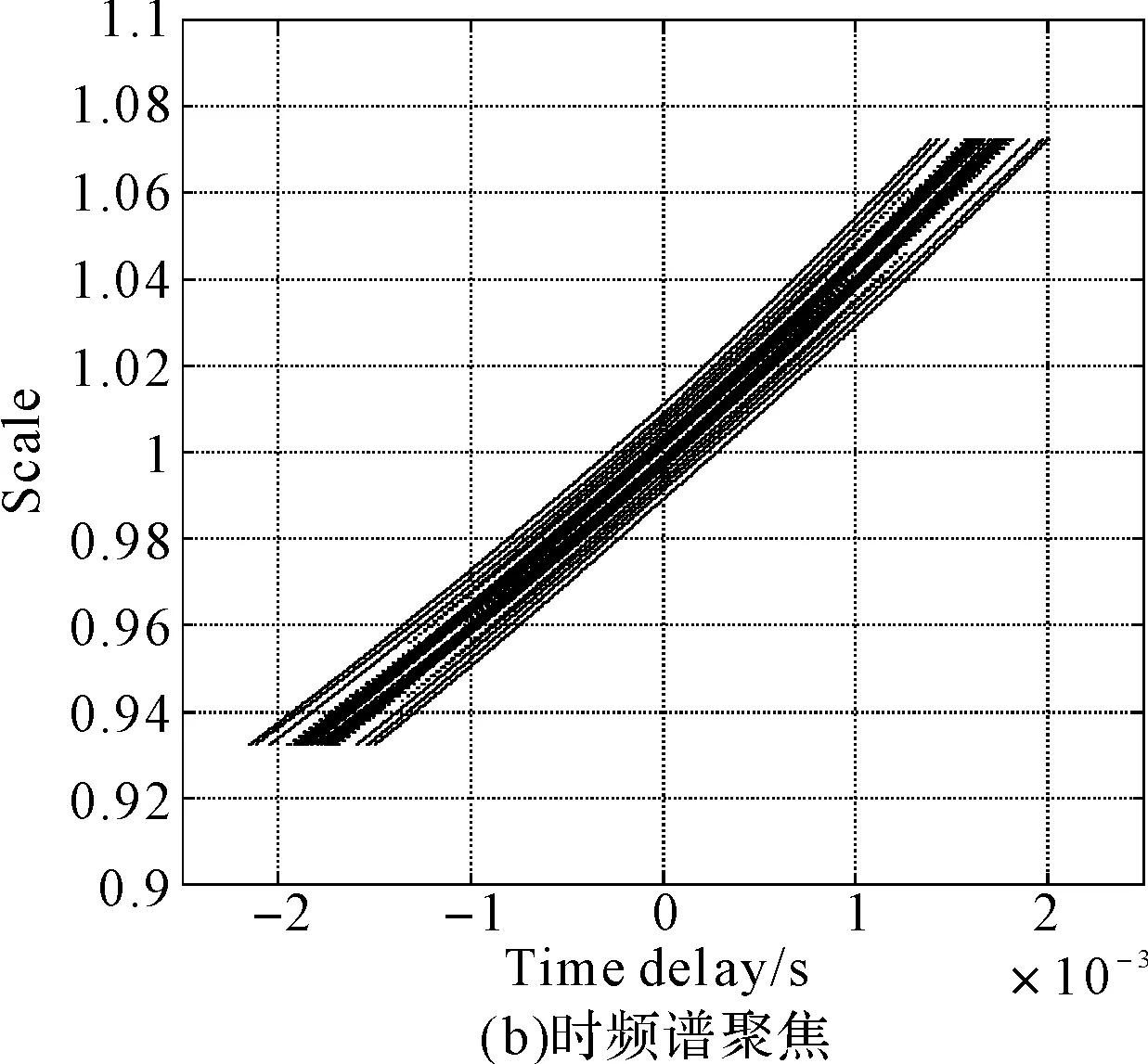
图5 信号检测的模值及谱聚焦结果
从图可见,采用本文方法进行水下微弱目标检测,时频谱具有较好的聚焦性能,能有效实现时频谱的特征提取,输出准确的目标信息。为了定量刻画检测性能,采用1000次蒙特卡洛实验,得到本文方法和传统的匹配滤波检测方法进行目标检测的ROC曲线如图6所示。从图可知,本文方法进行目标检测的准确概率高于传统方法。
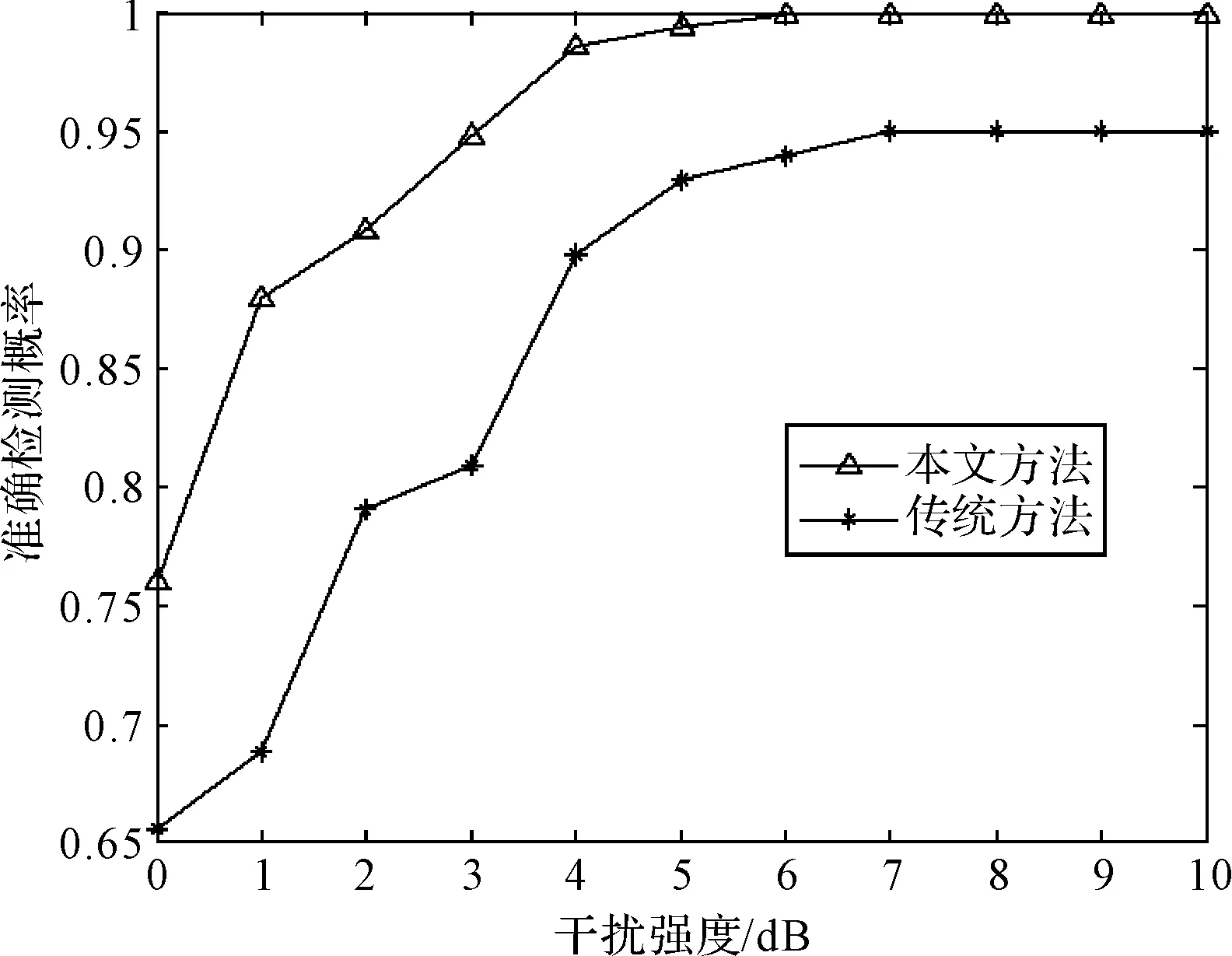
图6 检测性能曲线对比
5 结语
为了提高目标检测性能,本文提出一种基于自适应波束形成的水下微弱目标检测算法,构建水下微弱目标的反射回波模型,采用二阶自适应格型IIR陷波器进行信号抗干扰滤波处理,采用自适应波束形成算法进行水下微弱目标回波信号的时频聚焦,实现对目标信号的准确检测,最后进行仿真测试。结果表明,采用该方法进行水下微弱目标检测的精度较高,抗干扰性能较好,准确检测概率高于传统方法,本文方法在目标检测和水下武器的自导识别中具有较好的应用价值。
[1] 周勇,甘新年,胡光波,等.鱼雷制导控制系统多通道控制加权算法设计[J].现代电子技术,2014,37(19):14-17.
[2] 赵威. 强海水混响背景下水中兵器攻击目标检测研究[J].智能计算机与应用,2016,6(2):51-54.
[3] 黄朝,许鑫,刘敦歌,等.基于多传感器的微弱磁异常信号提取方法研究[J].电子测量技术,2015,38(10):91-95.
[4] 邓异,梁燕,周勇.水声换能器基阵信号采集系统优化设计[J].物联网技术,2015,5(4):36-37,41.
[5] 罗泽峰,单广超.基于网络和虚拟多媒体技术的海战平台视景仿真实现[J].物联网技术,2015,5(3):91-92,94.
[6] 赵威.基于鱼雷自导的舰船尾流回波模型建立方法[J].舰船电子工程.2013,33(4):81-83.
[7] 葛立志.基于全弹道控制分析的水下航行器攻击模型视景仿真[J].舰船电子工程,2015,35(3):137-141.
[8] 石鑫,周勇,甘新年,等.机载多源飞行数据资料的非线性检验[J].计算机与数字工程,2013,41(5):729-732.
[9] 闫源江,胡光波.关联维估计在舰船辐射噪声特征提取中的应用[J].科学技术与工程.2010,10(27):6756-6759.
[10] 徐骞,梁红,胡光波.基于二阶统计量的近场源四维参数联合估计[J].计算机工程与应用,2011,47(23): 137-140.
[11] 刘昊晨,梁红.线性调频信号参数估计和仿真研究[J].计算机仿真,2011,10(14): 157-159.
[12] 刘家亮,王海燕,姜喆,等.垂直线列阵结构对PTRM阵处理空间增益的影响[J].鱼雷技术,2010,18(4):263-267.
Underwater Weak Target Detection Technology Based on Adaptive Beamforming
ZHANG Guoguang
(Kunming Shipborne Equipment Research and Test Center, Kunming 650051)
The detection of weak signal of underwater target radiation is the key technology of underwater acoustic detection and submarine attacks. Aiming at the bad perfomance of the current matched filter detection method, a weak target underwater detection algorithm is proposed based on adaptive beamforiming, the echo model of weak target under water is constructed, two order adaptive IIR notch filter for signal interference filter is designed, the adaptive beamforming algorithm is used for time-frequency focusing weak echo signal to achieve accurate detection of underwater target signal, finally the simulation results show that the high precision test is obtained, using the method of weak target detection under water, the anti jamming performance is good, accurate detection probability is higher than the traditional method.
adaptive beamforming, underwater weak target, signal detection, filter
TN911
2016年9月15日,
2016年10月20日
张国光,男,硕士,助理工程师,研究方向:水下信号处理。
TN911
10.3969/j.issn.1672-9730.2017.03.030
