基于VISSIM的有轨电车交叉口信号控制策略研究
2017-04-06章瑀陈荣武王坚强
章瑀, 陈荣武, 王坚强
(1.西南交通大学 信息科学与技术学院,四川 成都 611756; 2.中国中铁二院工程集团有限责任公司, 四川 成都 610031)*
基于VISSIM的有轨电车交叉口信号控制策略研究
章瑀1, 陈荣武1, 王坚强2
(1.西南交通大学 信息科学与技术学院,四川 成都 611756; 2.中国中铁二院工程集团有限责任公司, 四川 成都 610031)*
以半独立路权下的有轨电车在交叉口的通行效率为研究对象,借助VISSIM对交叉口进行建模并通过感应信号控制模块模拟信号优先控制,分析了传统绝对优先策略的缺陷并对其进行了改进,比较不同信号优先下有轨电车行程用时以及交叉口总平均延误.结果表明:对交叉口信号采取一定优先控制,可在对公路车辆不造成过多延误影响的同时有效保障有轨电车在交叉口区域的顺畅通行.
有轨电车;VISSIM;交叉口信号;控制策略
0 引言
现代新型有轨电车是一种介于快速公交与轻轨的交通方式,其运能高于快速公交而单位造价投入远低于轻轨,并且具有节能环保、安全舒适等特点.与地铁等具有完全独立的路权形式不同,大部分有轨电车采用的是半独立路权,即路段内通过与其他车道设置物理隔离保障有轨电车通行完全独立,而交叉口区域与社会车辆共享路权[1].为保证有轨电车在交叉口区域顺利通行,需要对有轨电车道口信号以及公路交通信号进行协调控制,在给予有轨电车一定优先的情况下最小化交叉口整体延误,提高交叉口服务水平.
高翔[2]分析了不同交叉口类型下有轨电车信号优先相位设计的方法;金建飞[3]归纳了有轨电车信号优先的功能需求,并结合实际工程案例提出了设计原则;黄坤林[4]针对南京有轨电车这一实例,提出了路口优先方案,并罗列了线路沿线交叉口所使用的信号优先形式.目前针对有轨电车交叉口信号控制策略文献众多,但大多缺少具
体量化数据作为理论支撑,因而本文借助VISSIM对交叉口进行建模仿真,通过评价数据分析各策略的优劣并做适当改进.
1 信号优先分类
与公交信号优先控制策略相类似,有轨电车道口信号优先也可分为被动优先、主动优先与实时优先[5].主动优先根据有轨电车路段中铺设的检测器获取电车通过信息,并结合公路交通信号时间给予其一定的通行优先权.根据优先条件,主动优先又可分为绝对优先与相对优先.
绝对优先策略下,当有轨电车预备接近交叉口时,将关闭公路交通中与电车通行冲突的信号相位,同时有轨电车道口信号机显示绿灯,保证电车在道口前不停车的通过并确保有轨电车在道口的通行安全,当有轨电车通过道口后,公路交通信号继续以原固定配时方案运行.而相对优先策略还考虑了有轨电车通过检测器时公路信号相位的运行情况,减少了交叉口区域公路交通的整体延误,常见的控制方法有红灯早断,绿灯延长,插入通行相位等[6].
2 基础仿真模型
2.1 路网模型
选取某有轨电车主次道路相交交叉口,有轨电车线路按照东西走向布置于道路中央,并在交叉口位置设置有轨电车道口信号机,如图1所示.
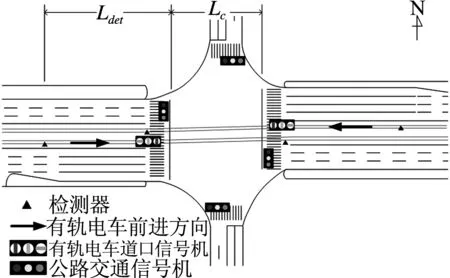
图1 交叉口路网模型
有轨电车上下行线路接近交叉口方向布设有检测器,用于检测电车通过信息.检测器与交叉口停车线之间距离Ldet可根据以下公式计算[1]:
(1)
其中,tyellow为异相黄灯时间,vtram为有轨电车接近交叉口时的车速,根据有轨电车旅行速度并结合实际路口黄灯时间即可确定检测器的布设距离.
2.2 交叉口流量调查
通过人工观测法对选取的交叉口进行实际交通流量调查,调查时间段为工作日晚高峰(17∶00 ~18∶00).统计道路车辆组成为小汽车、中型公交、小货车,未经折算的总交通量数据见表1.限于人力及简单起见,VISSIM中对三种车型按照7∶2∶1的比例设置车辆组成并在每一进口道设置对应的流量输入.
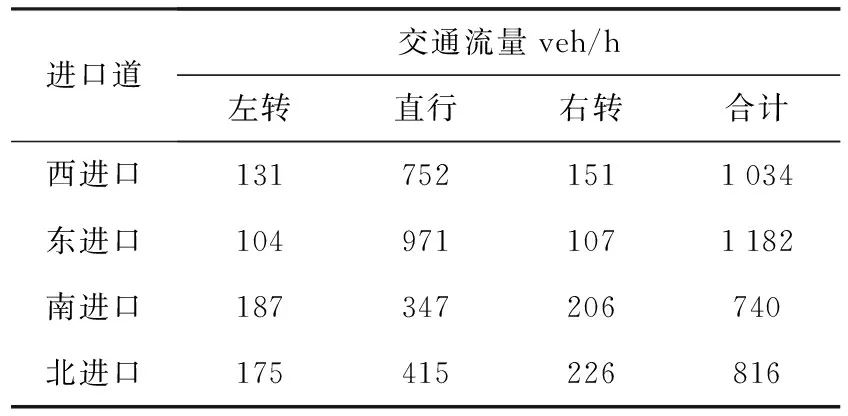
表1 交叉口流量
2.3 有轨电车车辆模型
为保证最后的仿真评价结果更加准确的反应交叉口真实状况,需要对有轨电车相关基本参数进行调查,以便在VISSIM中进行车辆模型参数的设置.
有轨电车关键参数[7]:车辆长度为20~45m;最高运行速度为70 km/h;平均起动加速度为1.0m/s2;常用制动减速度为1.1 m/s2;紧急制动减速度为2.5 m/s2
另外,有轨电车骨干线高峰运行速度不小于20 km/h,且发车间隔不大于3 min;一般线高峰运行速度不小于15 km/h,发车间隔不大于8min[8].在VISSIM中进行仿真时可据此编排有轨电车路线时刻表,将发车间隔控制在3~5 min之间,避免发车频率过高对信号优先交叉口整体通行能力造成影响[9].
3 信号控制方案
3.1 基本信控方案
由于公路车流在交叉口区域有转向需求,不同方向的车辆合流分流时产生了众多冲突点,若不进行有效的交通信号控制,在时间上分离冲突车流以减少或消除车流间的冲突点,则极易造成拥堵甚至事故[10].根据交叉口路网模型以及有轨电车车道布置,分析交叉口冲突点如图2所示.
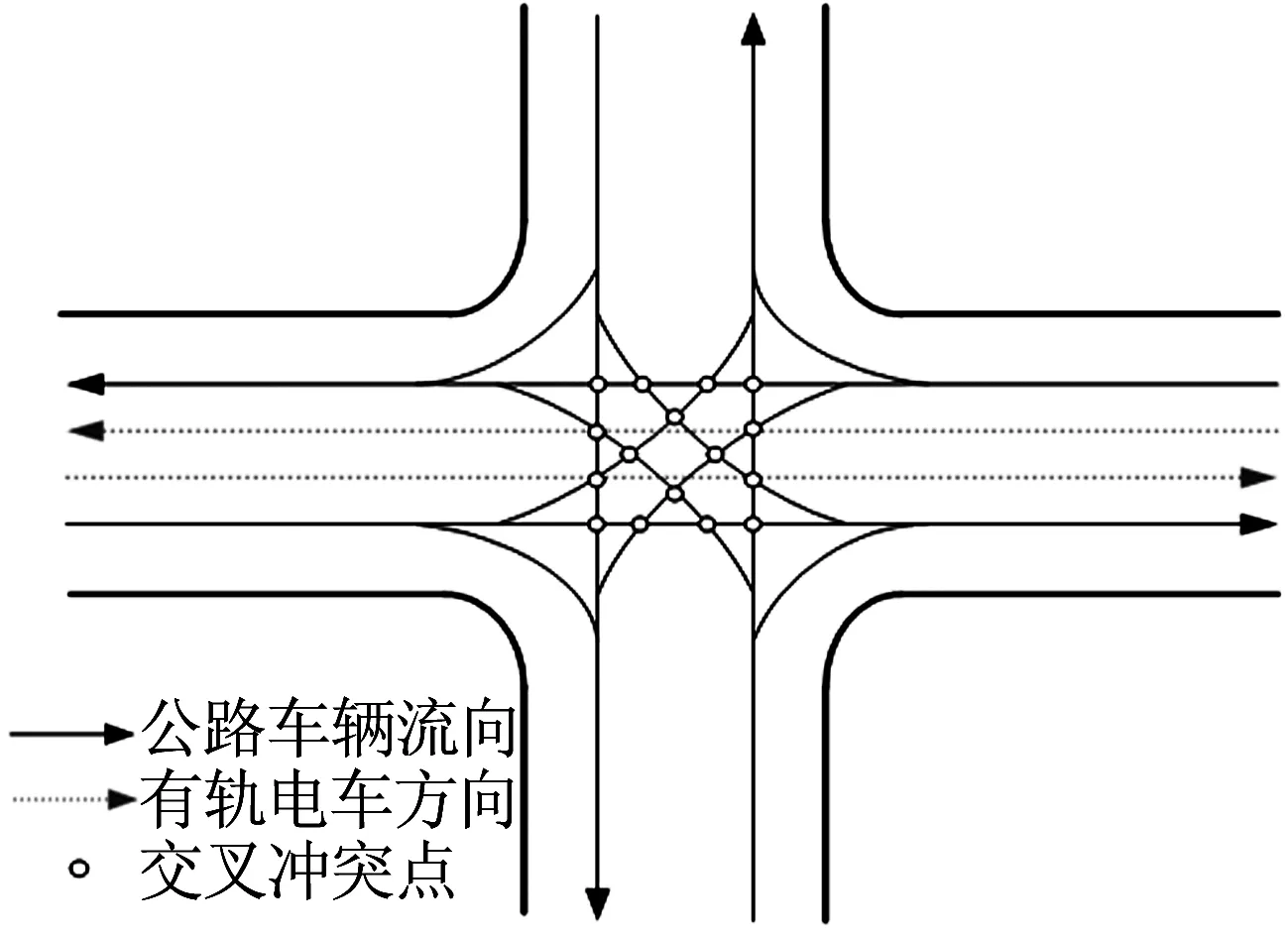
图2 交叉口冲突点分布
有轨电车采用右侧行车方式且车道布置于道路中央,根据冲突点分布图示,若采用二相位信号为基础对交叉口进行信号控制,有轨电车会与同向的公路左转车流产生冲突,对有轨电车行车产生较大安全隐患,故电车通过时需要对左转车流进行防护.结合实际车流量调查,南北方向车流较有轨电车所在主干道更少,此交叉口以三相位进行信号控制更为适宜.
采用交通信号协调配时软件Synchro根据车流量进行三相位信号配时,各相位绿灯时长如图3所示,公路交通信号基本运行顺序为相位A-B-C,其中相位间切换的黄灯时间为3 s,总周期计时120 s.相位T为有轨电车道口信号专用相位,在检测器未检测到电车通过时,道口信号长亮红灯;当检测器检测到电车通过,可在非冲突相位(相位A)开放的同时开启相位T,或在冲突相位(相位B、C)间切断冲突相位后插入相位T.
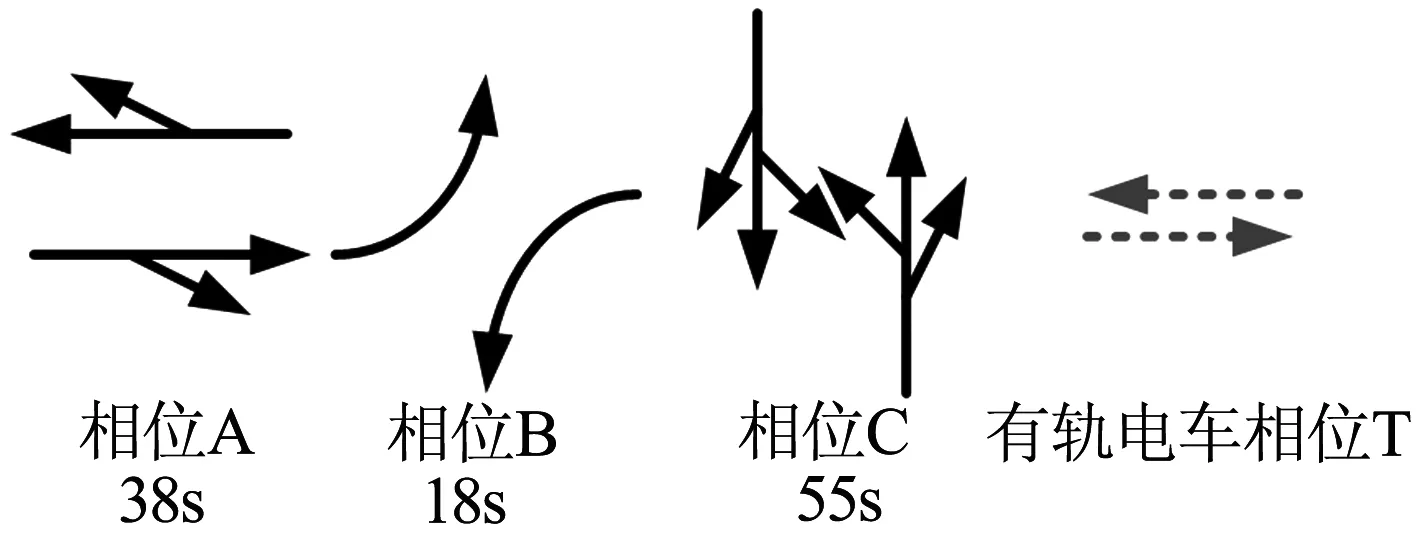
图3 信号相位
若采取传统的固定周期配时而不使用任何的感应优先控制,有轨电车道口信号将与相位A同步开放或关闭,该种信号控制下有轨电车在道口将会停等较长时间,无法体现轨道交通的快速性与便捷性.
3.2 信号优先控制
如图1所示有轨电车检测器位置距离交叉口出口距离为Ldet+Lc,m,有轨电车平均旅行速度为vtram,m/s,则从检测器到交叉口出口的行驶时间为(Ldet+Lc)/vtram,s.另设ti_green为有轨电车通过检测器时公路交通相位i的绿灯剩余时长,Ti_green为对应i相位的完整绿灯时长.
3.2.1 绝对优先
当有轨电车通过检测器时前方交叉口信号显示为相位A,则道口信号开放,直至有轨电车完全通过交叉口后关闭.若tA_green≤(Ldet+Lc)/vtram,公路交通信号在电车通过后直接切换至B相位,即相位A-(A+T)-B-C;反之,继续显示A相位,直至满足A相位的规定绿灯时长后再做切换.
当电车通过检测器时交叉口信号为相位B,则切断B相位后插入T相位,有轨电车通过后T相位关闭,公路交通信号继续按照原有相序运行,顺序为相位B-T-C-A;当电车通过检测器时交叉口信号为相位C,则提前开放A、T相位,电车通过后关闭道口信号并继续运行A相位,至满足规定绿灯时长,即顺序为相位C- (A+T)-A-B;
3.2.2 相对优先
为减少绝对优先策略执行时可能过早的切断异侧通行相位,对南北向交通造成过多影响,相对优先在绝对优先的基础上还综合考虑了有轨电车通过检测器时公路交通相位的剩余时间,避免B、C相位运行时间过短.
当有轨电车通过检测器时前方交叉口相位显示为B或C,若ti_green≤Ti_green/2,(i=B,C),则切断当前相位,插入或者提前有轨电车通行相位;反之,道口信号机保持显示红灯,待当前公路交通相位结束后再处理有轨电车通过请求.相对优先减缓了公路方面车辆的拥堵,但是在某些情况下有轨电车需要停车等待,增加了行程时间.
3.2.3 含时间补偿的绝对优先
绝对优先虽然可以保证有轨电车在交叉口不停车的连续通过,但是对南北方向的公路车流却造成了产生了较大影响,特别是当高峰期时车流量增多,采用直接截断冲突相位的绝对优先所导致的车辆排队长度将会是传统固定周期配时下的2~3倍.所以一定条件下有必要在有轨电车通过之后返回原先的冲突显示相位,对其进行一定的时间补偿,以便疏解有轨电车异侧的冲突车流.
该种优先控制下为防止补偿时间过短以及频繁的相位间切换造成损失时间的增加,规定当有轨电车通过检测器时前方交叉口相位显示为B或C,若ti_green≥Ti_green/2,(i=B,C),则有轨电车通过交叉口后需要返回原先被切断相位继续显示,补偿时间为Ti_green-ti_greens,补偿时间过后继续按照基本顺序显示下一相位;反之ti_green≤Ti_green/2,(i=B,C)时不再进行时间补偿.
3.3 信号优先时序分析
图4描述了上述各信号控制方案下的信号相位变化时序图,其中黑色三角箭头代表了感应控制下有轨电车车头经过交叉口前检测器的时间.
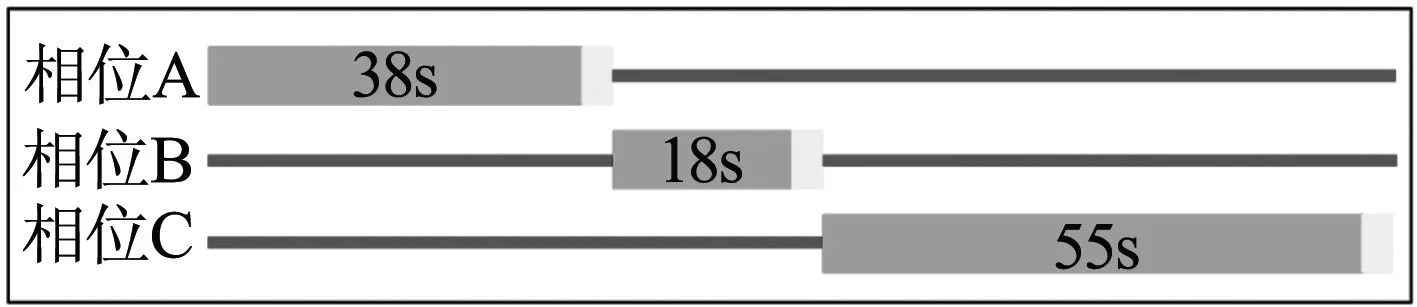
(a)固定周期配时
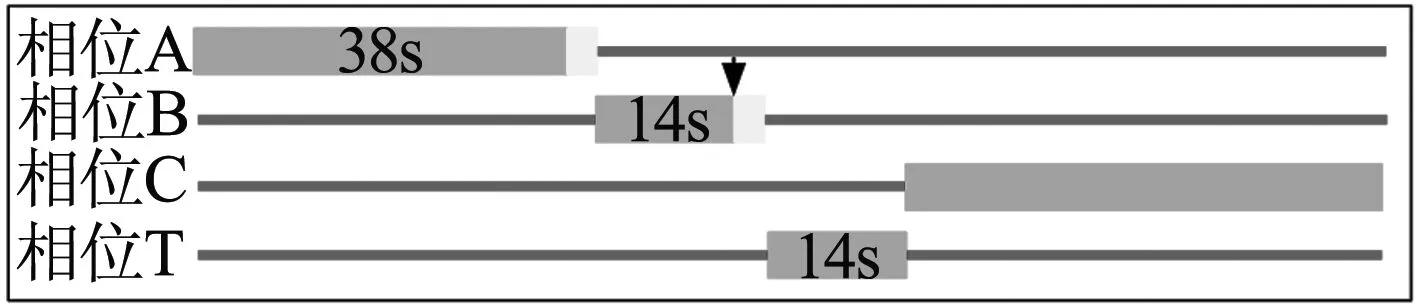
(b)绝对优先
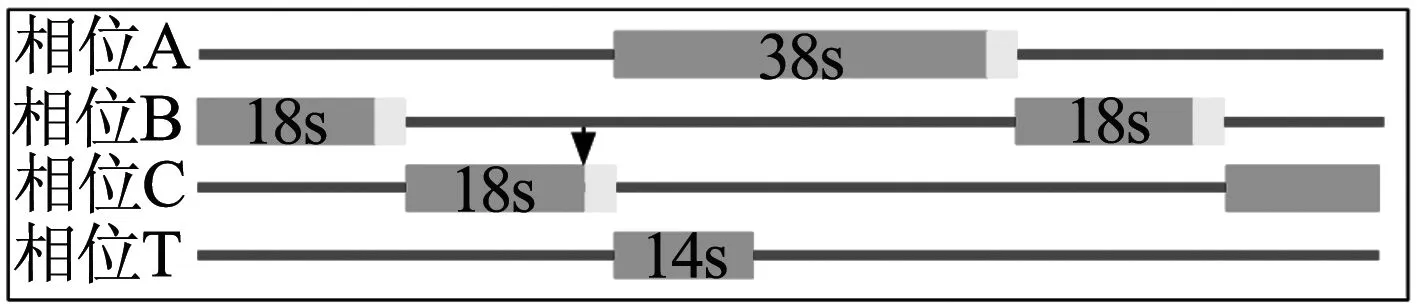
(c)相对优先
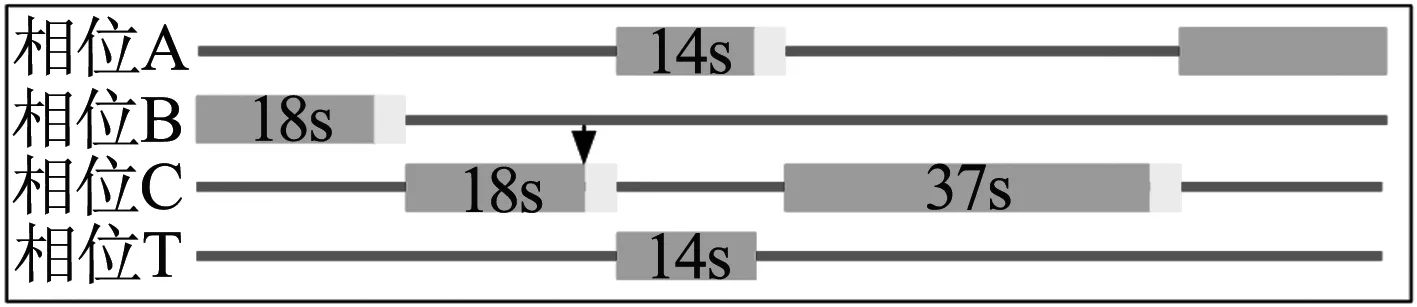
(d)含时间补偿的绝对优先
采用绝对优先下,图4(b)中的相位C在运行18s时检测器检测到有轨电车通过,随后即开放道口信号并同时切换到相位A允许东西方向直行的公路车辆通过.改进后含时间补偿的绝对优先则在有轨电车通过道口后继续返回相位C,补偿运行37s,使被切换前后的两次绿灯时长之和与固定周期下一致,有效疏解南北方向的车流拥堵.采用相对优先下,图4(c)中的相位B在运行14s时检测到电车通过,此时符合将当前相位提早切断的条件,即在相位B后单独开放有轨电车道口信号,待电车全部用过后再切换至下一相位.
4 运行仿真及评价
对交叉口进行3600s仿真,安排上、下行有轨电车班次各16对,仿真效果如图5所示.图5描述了在相对优先下公路交通于相位B时检测到
有轨电车通过,并满足规则中的条件:tB_green≤TB_green/2,将相位B切断后插入有轨电车通行相位T时的仿真情况.
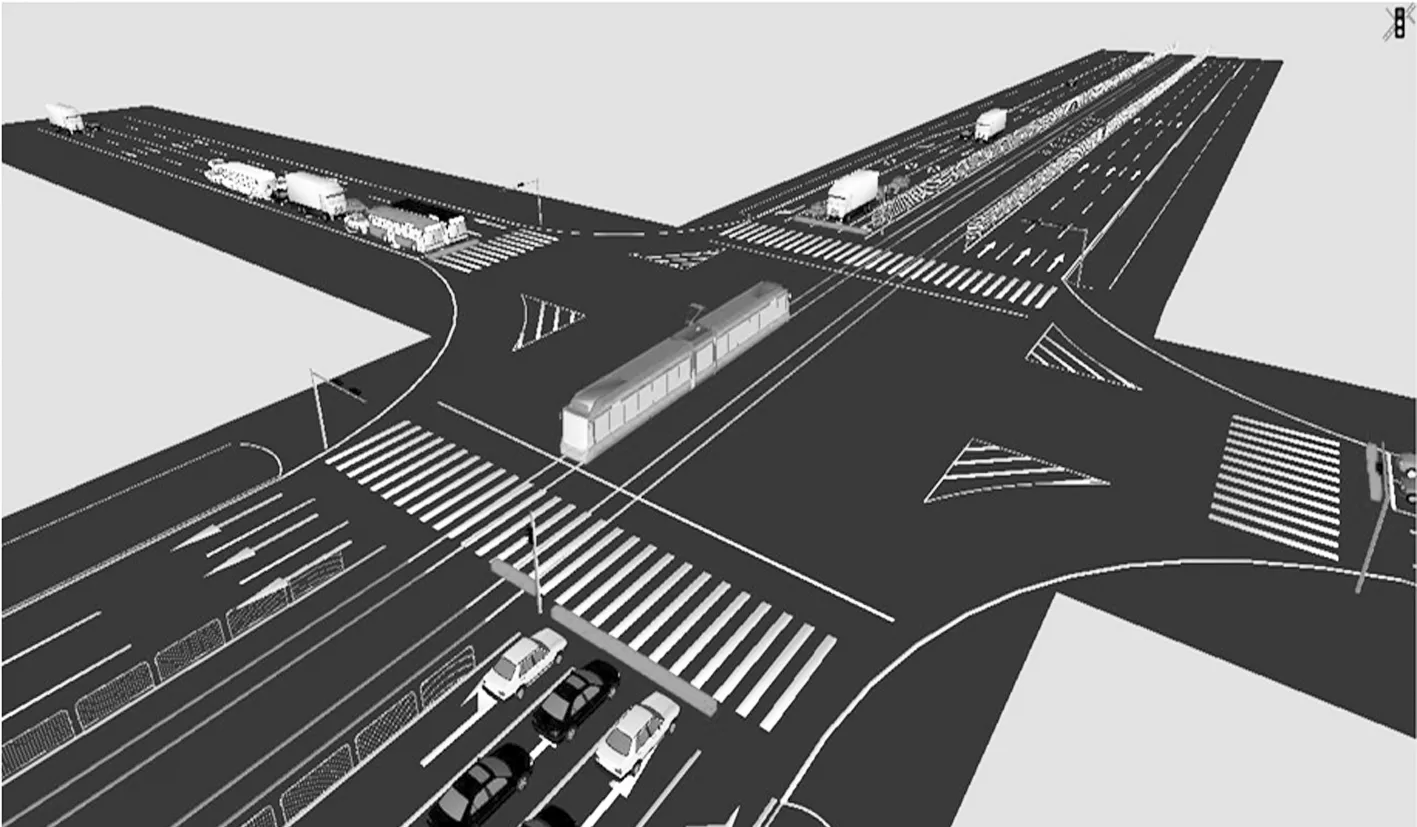
图5 仿真截图
选取有轨电车在交叉口区域300m的平均行程时间、延误时间,以及公路交通停车线前的排队长度、总平均延误为评价指标,对该交叉口运行仿真并进行评价,评价结果见表2.
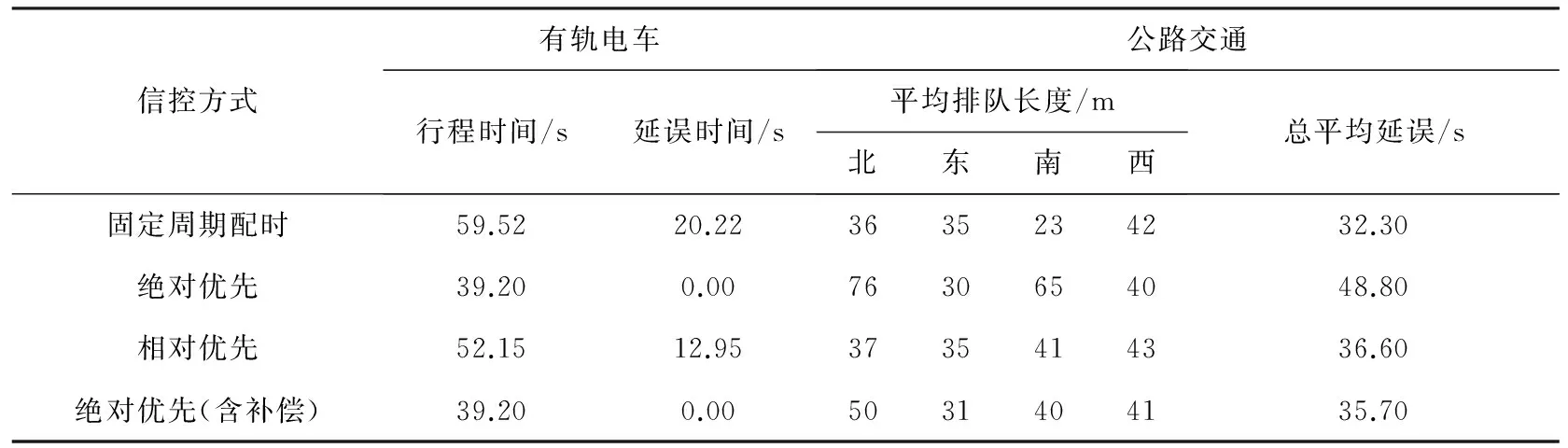
表2 评价结果
由表2可知,采用了感应控制后,有轨电车延误时间均有大幅减少,尤其是绝对优先控制下,有轨电车在交叉口前不需停车,保证了通行效率.同时绝对优先给公路交通带来的则是较严重的拥堵,特别是南北向公路交通,由于过早切断通行相位,停车线前的平均排队长度相比于固定周期配时成倍增长,而对其改进增加了时间补偿后,南北方向的拥堵有所减缓,交叉口总平均延误也明显降低.相对优先下,部分有轨电车班次可能会在交叉口前停车等待,造成行程时间延误,但对公路交通的影响较小,不会造成大规模的排队拥堵.
综上,对于该建模的主次道路交叉口,可以考虑采用相对优先以及含有时间补偿的绝对优先,尤其是对有轨电车通行有较高要求不允许有过多停车的情况下可以优先考虑后者,但需要注意的是相位间的频繁切换将会导致损失时间的增加,进而造成交叉口通行能力与交通效率的下降.当相交道路为车流量较少的支路时,为保证有轨电车高效通行且不对公路车辆造成过多延误,可考虑采用绝对优先进行信号控制.
5 结论
本文对有轨电车在交叉口的信号控制策略进行了建模仿真,并对绝对优先策略进行了改进,增加了时间补偿,使改进后的交叉口总体延误降低.从评价结果看出,相对优先与改进后含有时间补偿的绝对优先能有效协调有轨电车与公路车流,前者对公路交通影响较小而后者更能保证有轨电车不停车的通过交叉口.上文只讨论了有轨电车在交叉口直行通过的单一情况,对于在交叉口左转、右转的情形,本文讨论的方法也具有一定借鉴意义.
[1]彭丰. 半独立路权条件下有轨电车交叉口信号控制仿真优化研究[D].北京:北京交通大学,2015.
[2]高翔.交叉口信号优先技术在有轨电车系统中的应用研究[J].上海公路,2015 (2):69-72.
[3]金建飞.现代有轨电车信号优先设计方案研究[J].交通企业管理,2013(10):47- 49.
[4]黄坤林,谢勇.有轨电车路口优先问题研究[J].铁路技术创新,2013 (6):60-63.
[5]马万经. 公交专用道信号优先控制理论研究[D].上海:同济大学,2007.
[6]李凯,毛励良,张会,等.现代有轨电车交叉口信号配时方案研究[J].都市快轨交通,2013(2):104-107.
[7]北京市基础设施投资有限公司,北京城建设计研究总院有限责任公司. 北京市现代有轨电车技术标准[S].北京:中国标准出版社,2010.
[8]湖北省交通运输厅.现代有轨电车技术将统一标准[EB/OL]. http://www.hbjt.gov.cn/zwdt/hyjj/zgys/116465.htm.
[9]蒋宏.平面交叉口有轨电车车站位置对公交信号优先策略的影响[J].交通与运输(学术版),2015 (1):78-81.
[10]王波. 城市道口交通组织与信号控制策略研究[D].吉林:吉林大学,2005.
下期待发表文章摘要预报
基于EEMD-JADE的单通道EP信号少次提取方法
彭雪婵,张旭秀,姚鑫,李卫东
(大连交通大学 电气信息学院,辽宁 大连 116028)
摘 要:生物医学工程中诊断神经系统损伤及病变的重要手段之一是检测与分析诱发电位(Evoked Potential, EP)信号.现有的方法可以在混合信号中分离出经过成多次刺激的EP信号,但丢失了其瞬时特性,因此EP信号的少次提取是当前生物医学信号研究中的一个重点问题.给出了一种基于EEMD-JADE单通道盲源分离算法,只利用2个周期的EP与EEG信号随机混合成的单通道观测信号中分离EP信号,仿真实验证明了EEMD-JADE算法的有效性.并与EEMD-PCA-ICA方法比较,结果表明EEMD-JADE算法从2个周期的单通道观测信号中分离EP信号时性能优于后者.
Research on Tram Intersection Signal Control Strategy based on VISSIM
ZHANG Yu1, CHEN Rongwu1, WANG Jianqiang2
(1.School of Information Science & Technology ,Southwest Jiaotong University, Chengdu 611756,China; 2. China Railway Eryuan Engineering Group Co., Ltd, Chengdu 610031,China)
To ensure the tram at traffic mix intersection safety and effciency under semi-independent way rights, VISSIM is used to model the intersection, and induction signal control module is used to analog signal priority control. The defects of the traditional absolute priority strategy are analyzed and improved. The tram travel time and the total average delay of the intersection in different signal priorities are compared. Results show that certain priority control of the intersection signal would not cause excessive delays on the public traffic and meanwhile ensures the tram smooth passage in the intersection area effectively.
tram; VISSIM; intersection signal; control strategy
1673- 9590(2017)02- 0112- 05
2016-04-26 基金项目:四川省科技支撑计划项目(2014GZ0081)
章瑀(1990-),男,硕士研究生; 陈荣武(1971-),男,高级工程师,博士,主要从事交通信息工程及控制方面的研究
A
E- mail:zhangyu@my.swjtu.edu.cn.