机载座舱高度限制功能研究
2017-03-28於二军呼明亮
於二军,席 鹏,呼明亮,吴 斌
(中航工业西安航空计算技术研究所,陕西 西安 710119)
机载座舱高度限制功能研究
於二军,席 鹏,呼明亮,吴 斌
(中航工业西安航空计算技术研究所,陕西 西安 710119)
机载座舱压力控制系统是保障人员安全和结构安全的一套安全关键系统。为保证在自动控制通道失效情况下的人员与机体安全,针对一套典型的双舱增压座舱压力控制系统,通过设计一套独立的纯硬件通道实现座舱高度限制功能,并设计维护测试功能接口,保证座舱高度不高于4 500 m。该设计已经应用于工程实际,能满足实际应用要求。
座舱压力控制系统;座舱高度;高度限制
在国际标准大气里,每一高度上有一确定的大气压力,同样,每一个大气压力就对应一个高度。飞机飞行时,常常使用座舱内压力所对应的标准大气高度,来表示座舱里压力的高低(简称座舱高度)。现代客机的飞行高度一般为8 000 m~12 000 m,CCAR25.841及FAR25.841条款规定:当飞机以最大飞行高度飞行时,座舱及行李舱的气压高度不得超过2 400 m(8 000 ft)。当飞机需要在7 600 m(25 000 ft)以上飞行时,必须保持增压系统故障时座舱内气压高度不超过4 500 m(15 000 ft)。飞机失压将导致飞行员及乘客缺氧,进而昏迷、失去行动能力,导致飞行事故。
如何有效地保障座舱高度不超过4 500 m,并提供足够的可靠度和隔离性保证一直是航空工业界研究的重点。本文以一套典型双舱增压座舱压力控制系统为例,针对座舱增压系统故障的情况下,设计一套独立的纯硬件通道实现座舱高度限制功能,保证座舱高度不高于4 500 m。
1 体系架构设计
1.1 双舱增压座舱压力控制系统
座舱压力控制系统用于控制座舱增压值以保证乘员生命安全和机组人员的正常工作,同时,限制座舱压差在结构强度规定的范围之内[1]。当飞机从地面升入高空时,外界大气压力可从一个大气压变化到接近真空。在此过程中,空调系统向座舱源源不断地供应空调气体,并保持供气量基本不变。座舱压力控制系统通过控制排气活门的开度来控制排出座舱的空气流量,从而达到控制座舱高度的目的。本文提到的双舱增压座舱压力控制系统典型应用于民用各型运载器的压力控制系统,是为了满足经济性、舒适性及特殊应用情况的需要(如水上迫降等)。现代飞机的座舱压力控制系统一般包括两套独立的自动控制系统、一套手动排气活门调节装置,以及两套正、负释压活门[2]。两套独立的自动控制系统应等同使用,保障在一套故障的情况下,另一套能自动转换工作,保障系统的功能性能控制要求;手动排气活门调节装置用于在自动通道失效(或自动通道控制超差)的情况下,驾驶员手动调节排气活门的开度来调节座舱压力;正、负释压活门为机械装置,当增压系统故障,或操纵不当,使座舱内压力过高时,安全正释压活门打开,释放座舱压力。当压力下降后,安全正释压活门在弹簧力作用下关闭。当飞机快速下降高度时,如果座舱内的压力不如座舱外的压力变化快,就可能出现负压差的情况(即座舱压力低于外界压力)。当负压差达到一定程度时,负压释压活门就打开释压,以保护飞机结构;当负压差减小或消失后,负压释压活门在弹簧力作用下回到关闭状态。正、负释压活门为安全保护装置,仅限极限情况下使用。在实际工作中当自动通道失效,座舱压力急剧变化的情况下,驾驶人员如果没有及时发现而转手动等情况下,极易发生飞行安全事故。为了满足此种工况的需要,就需要有一套独立的纯硬件高度限制功能通道能自动超控座舱排气活门,来满足座舱高度不低于4 500 m的需要。
1.2 高度限制功能体系架构
为完成高度限制功能的最小功能部件集合包括:座舱增压控制面板、驾驶舱压力传感器、高度限制功能模块(隶属于环控系统综合控制器)、主舱压力传感器、驾驶舱排气活门、主舱排气活门等(体系架构示意图如图1所示)。当高度限制功能工作时,高度限制功能完全独立于自动、手动控制及应急操作功能,且超越自动和手动控制,关闭排气活门,达到增压的目的。

图1 高度限制功能体系架构示意图
2 高度限制功能设计
2.1 高度限制功能模块设计需求
依据高度限制功能约束,高度限制功能模块的设计需求主要包括如下几点:
1) 功能模块采用纯硬件实现,采用应急28 V直流电源供电,与座舱压力控制系统自动控制通道异构并物理隔离。
2) 高度限制功能模块具备采集座舱增压控制面板的离散输入信号(地/开型)、压力传感器的电流输入信号(0 mA~30 mA电流输入,输入电流与压力的关系如表1所示),具备输出用于高度限制的离散型控制信号(28 V/开)。
3) 自动模式下,当驾驶舱(主舱)高度限制压力传感器4监测的压力低于57.2 kPa(高度高于4 500 m)时,高度限制功能模块超越自动控制通道发出驾驶舱(主舱)排气活门关闭指令,驱动手动电机关闭驾驶舱(主舱)排气活门。
4) 自动模式下,当驾驶舱(主舱)高度限制压力传感器4监测的压力高于59.5 kPa(高度低于4 200 m)时,将驾驶舱(主舱)排气活门控制权交给其自动控制通道。
5) 自动模式下高度限制功能模块根据座舱增压控制面板的“战斗压差”按钮或“主舱卸压”按钮或“应急卸压”按钮按下信号抑制驾驶舱(主舱)4 500 m高度限制功能。
6) 手动模式下,当驾驶舱(主舱)高度限制压力传感器4监测的压力低于57.2 kPa(高度高于4 500 m)时,高度限制功能模块超越手动控制通道发出驾驶舱(主舱)排气活门关闭指令,驱动手动电机关闭驾驶舱(主舱)排气活门。
7) 手动模式下,当驾驶舱(主舱)高度限制压力传感器4监测的压力高于59.5 kPa(高度低于4 200 m)时,将驾驶舱(主舱)排气活门控制权交给其手动控制通道。
8) 高度限制功能模块上电后能完成高度限制控制功能的检测,并能通过自动通道上报健康状态。
2.2 高度限制功能在线检测设计
按照高度限制功能模块设计功能要求,高度限制功能需具备在线检测功能,并通过环控系统综合控制器的自动通道上报测试结果。由于高度限制功能为纯硬件模块实现,并且直接控制排气活门的开闭,所以对该功能的任何非预期的操作必须通告飞行员,所有对高度限制功能的测试需在机组人员或地勤人员的支持下完成。高度限制功能模块与中央维护系统CMS通过环控系统综合控制器自动通道B进行信息交互。
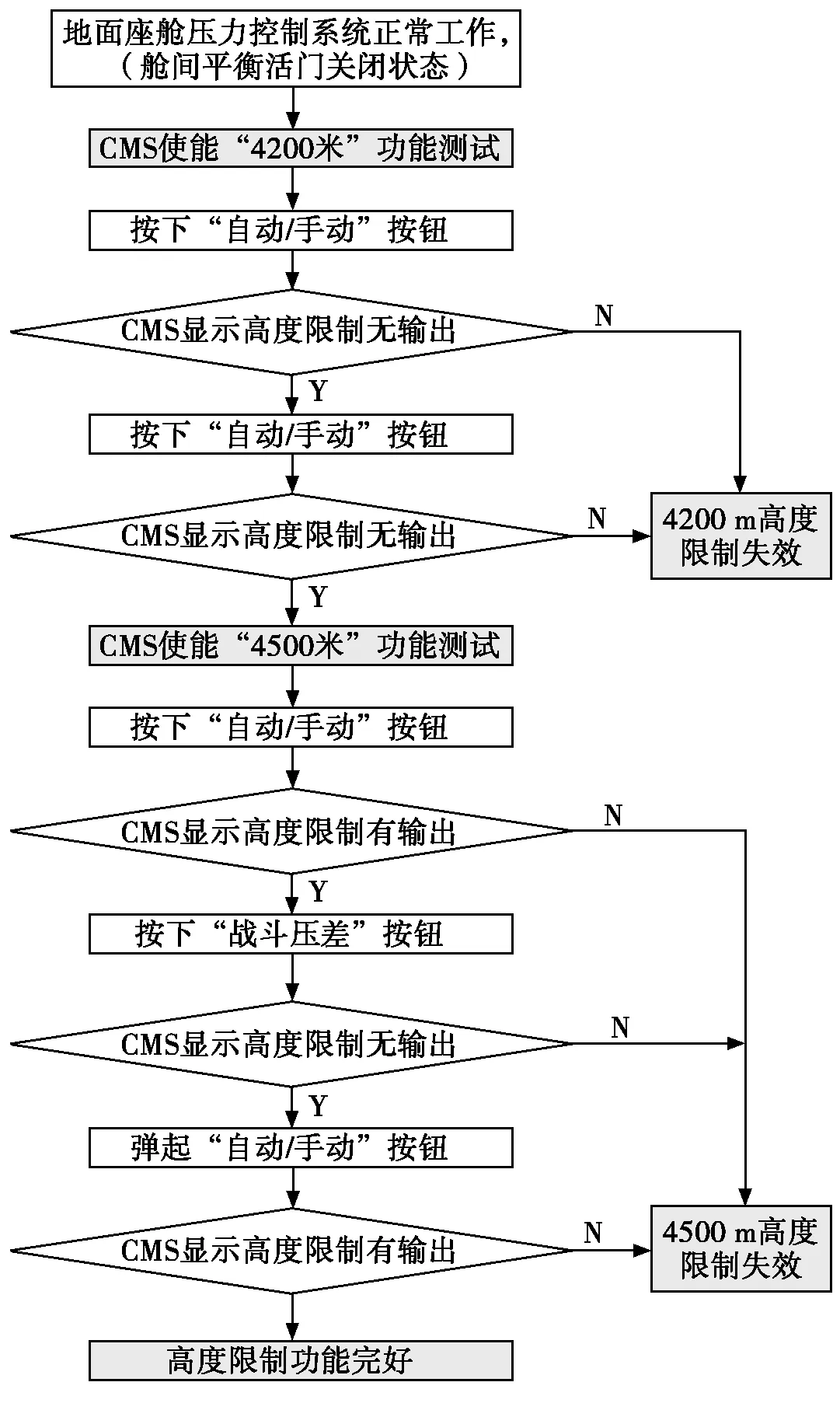
图2 高度限制功能飞行前维护流程
2.3 高度限制功能模块实现方案
高度限制功能模块物理实现主要包括如下几个功能单元:传感器采集电路、二次电源及电源基准电路、功能逻辑电路、高度限制功能测试电路(通过调整电气参数模拟外部座舱高度压力传感器输入)等。高度限制功能模块硬件设计原理框图如图3所示。模块供电采用28 V应急直流电源,通过内部变换产生模块使用的二次电源。
3 结论
本高度限制功能模块参与座舱压力控制系统的地面联试试验,可满足“自动控制”、“手动控制”、“自动转手动”、“战斗压差”、 “主舱卸压”及“应急卸压”等不同模式和“平起平降”、“高起平降”、“高起高降”等不同飞行包线下的高度限制功能研制,均取得良好的效果,表明该高度限制功能设计原理具备工程实用价值。
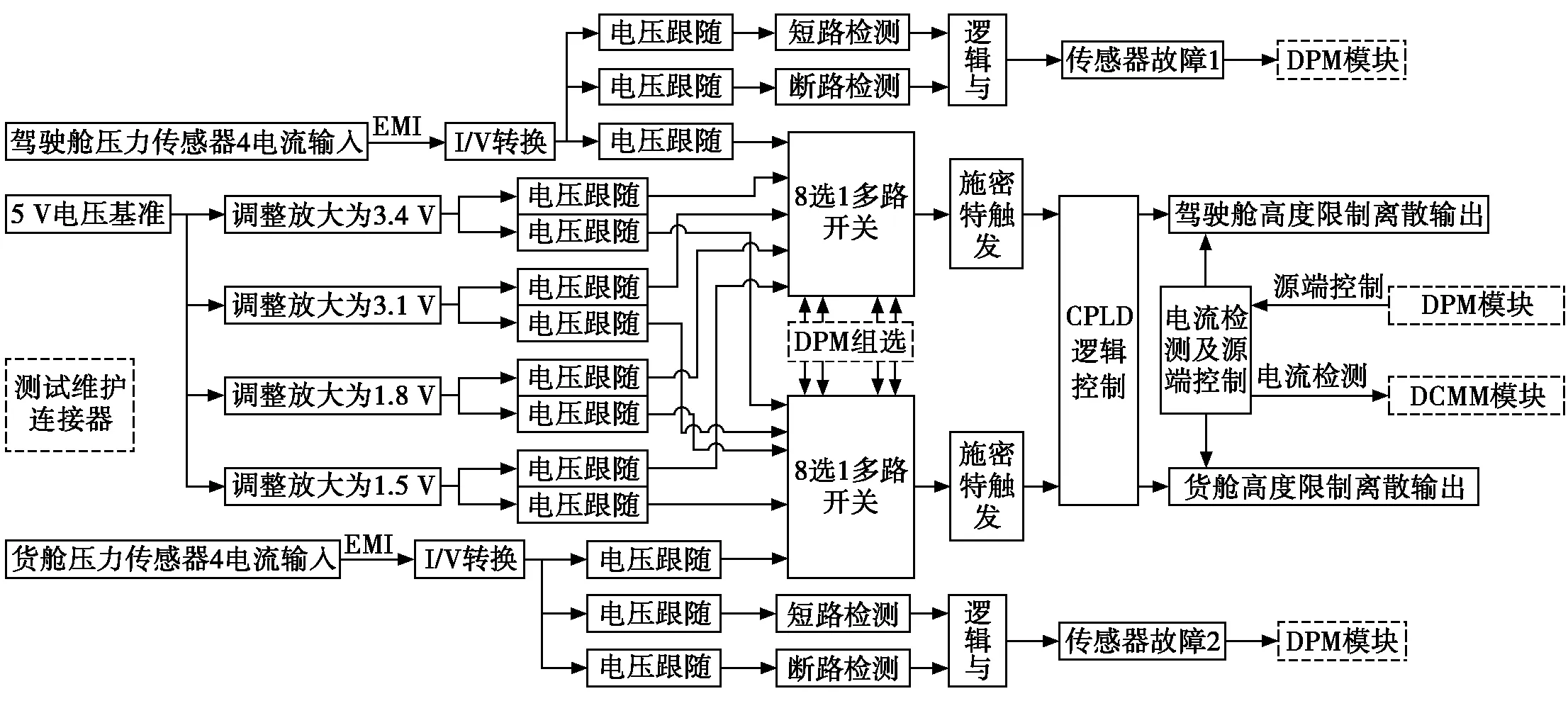
图3 高度限制功能模块原理框图
[1] 朱春玲.飞行器环境控制与安全救生[M].北京:北京航空航天大学出版社,2006.
[2] HB7489,民用飞机环境控制系统通用要求[S].1997.
[3] CCAR-25,运输类飞机适航标准[S].中国民用航空局令第209号,2011.
[4] HB7229,民用飞机环境控制系统声学设计要求[S].1995.
[5] SAE ARP1270A-2006 Aircraft Cabin Pressurization Control Criteria[S].
Research on the Altitude Limit Function of Aircraft Cabin
Yu Erjun, Xi Peng, Hu Mingliang, Wu Bin
(AeronauticsComputingTechniqueResearchInstitute,Xi’anShaanxi710119,China)
Cabin pressure control system of aircraft is a critical safety system for guaranteeing personnel safety and stuctural safety. In order to ensure the safety of personnel and the aircraft in the case of the failure of the automatic control channel, in view of a typical double cabin pressure control system, the paper designs a independent hardware channel to achieve the cabin altitude limit function, and the design of maintain test function interface that guarantees the cabin altitude below 4500 meters.The design has been applied in engineering practice and can meet the requirements of practical application.
cabin pressure control system; cabin altitude; altitude limit
2016-11-25
於二军(1981- ),男,陕西榆林人,高级工程师,硕士研究生,研究方向为嵌入式计算机系统设计。
1674- 4578(2017)01- 0081- 03
TP29
A
