一种KYN61-40.5可移开式开关柜平移式活门机构设计
2016-12-29杨志忠
杨志忠
(浙江开关厂有限公司,浙江 衢州 324000)
一种KYN61-40.5可移开式开关柜平移式活门机构设计
杨志忠
(浙江开关厂有限公司,浙江 衢州 324000)
活门机构是可移开式开关柜必不可少的防触电装置。它可以确保在移开部件被拉出柜体后,检修人员的人身安全。本文以KYN61-40.5可移开式开关柜为例,详细的介绍了平移式活门机构设计要求、工作原理、杆件长度计算的方法和干涉验证等内容。
活门;平移式活门机构;杆件长度计算;干涉验证
1 引言
KYN61-40.5开关柜是我国35kV电力系统主导产品,按柜内使用的可移开部件(断路器手车)结构不同,开关柜的活门机构设计主要有两种:一种是链轮传动的旋转翻门式活门机构;另一种为连杆传动的平移式活门机构。本文以我公司生产的KYN61-40.5开关柜活门设计为例,阐述平移式活门机构机构设计要求、工作原理、杆件长度计算、干涉验证等内容。
2 活门的定义及活门机构设计要求
按GB 3906-2006第3.110条规定,活门是指金属封闭开关设备和控制设备的一种部件,它具有两个可以转换的位置,一个位置(工作位置)是允许可移开部件的动触头与固定触头结合,在另一个位置(试验位置),它成为外壳或隔板的一部分,遮住固定触头。对于KYN61-40.5开关柜,活门及活门机构的设计要求如下:
(1)活门作为隔板的一部分,活门材质优先选用PM级(具有接地连续性的金属隔板)。
(2)活门处于开启/关闭位置时,与带电体的电气距离(以空气作为绝缘介质)不低于300mm、防护等级不低于IP2X。
(3)随着可移开部件的推进/拉出,活门机构的设计要确保活门顺畅地开启/关闭,不得有干涉。活门机构应有独立的锁止装置,当可移开部件拉出柜体后,可靠防止检修人员失误打开活门。
(4)活门应标有“母线侧”、“线路侧”等识别字样,母线侧活门还应附有红色带电标志和相色标志。
3 平移式活门机构工作原理
图1为可移开部件处于试验位置装配简图,项3、4、7、8、9、10、16为装于柜体活门机构零部件,这些零部件可看作二个平面四连杆机构叠加构成,图中O1ABO2组成下活门平面四连杆机构(O1O2为固定机架),摇杆O2B延伸端F与下活门开槽铰接;O2CDO3组成上活门平面四连杆机构(O2O3为固定机架),摇杆O3D延伸端G与上活门开槽铰接。活门机构开启工作原理如下:图1中,在外力作用下,可移开部件项2自左向右作水平运动,在项12可移开部件推活门部件使力面E与活门机构驱动轴项13接触前,自动解锁活门机构锁止装置,当使力面E与活门机构驱动轴项13一经接触,即推动下活门平面四连杆机构的主动杆O1A绕支点O1作顺时针旋转,经连杆项10带动摇杆O2BF绕支点O2作顺时针旋转,从而带动下活门项7沿活门导杆项8作垂直向下运动,下活门打开。在下活门打开的同时,上活门平面四连杆机构的主动杆O2C绕支点O2作逆时针旋转,经连杆项16带动摇杆O3DG绕支点O3作逆时针旋转,从而带动上活门项4沿活门导杆项8作垂直向上运动,上活门打开。当可移开部件项2推进至图示Y面时(行程X<160mm),上下活门打开,并确保可移开部件触臂可进入上下触头盒项5而不干涉。继续推进直至活门机构驱动轴项13嵌入可移开部件推活门部件项12凹槽中,此时上下活门完全打开并保持稳定,直至可移开部件触臂项15与静触头6有效啮合,到达工作位置。活门机构关闭工作原理为:可移开部件由工作位置拉出,至图示Y面,在上下活门自重及复位弹簧作用下,活门机构驱动轴项13脱离可移开部件推活门部件项12凹槽,带动下活门四连杆机构主动杆11绕固定支点O1作逆时针旋转,经连杆10带动摇杆O2BF绕支点O2作逆时针旋、经连杆项16带动摇杆O3DG绕支点O3作顺时针旋转,上下活门关闭,当活门机构受力轴A从项12完全脱离后,上、下活门完全关闭,并由独立的锁止装置自锁。

图1 可移开部件处于试验位置装配简图
4 平移式活门机构杆件计算
以下活门为研究对象建立直角坐标系,图2为下活门直角坐标系,实线为活门关闭位置,虚线为活门打开位置。
图2中O1ABO2组成封闭四边形,按活门关闭位置各杆件在坐标轴x和y上的投影,可以得到以下方程式:
L1cosα+L2cosδ=L4+L3cosβ
(1)
L1sinα+L2sinδ= L3sinβ
(2)
分别将方程式(1)和(2)两边平方,利用cos2δ+ sin2δ=1,可得到α、β与各杆件的方程式:
(3)
同理可得活门关闭位置时α′、β′与各杆件方程式:
(4)
上述方程式(3)、(4)中,根据实践经验令L1=250mm、L4=915mm、α=20.00°,按照图1、图2已标注的尺寸,可计算出β=57.07°、α′=63.53°、β′=122.93°。将已知量代入方程式(3)、(4)中可求得L2=746.77mm,L3= 122.39mm。
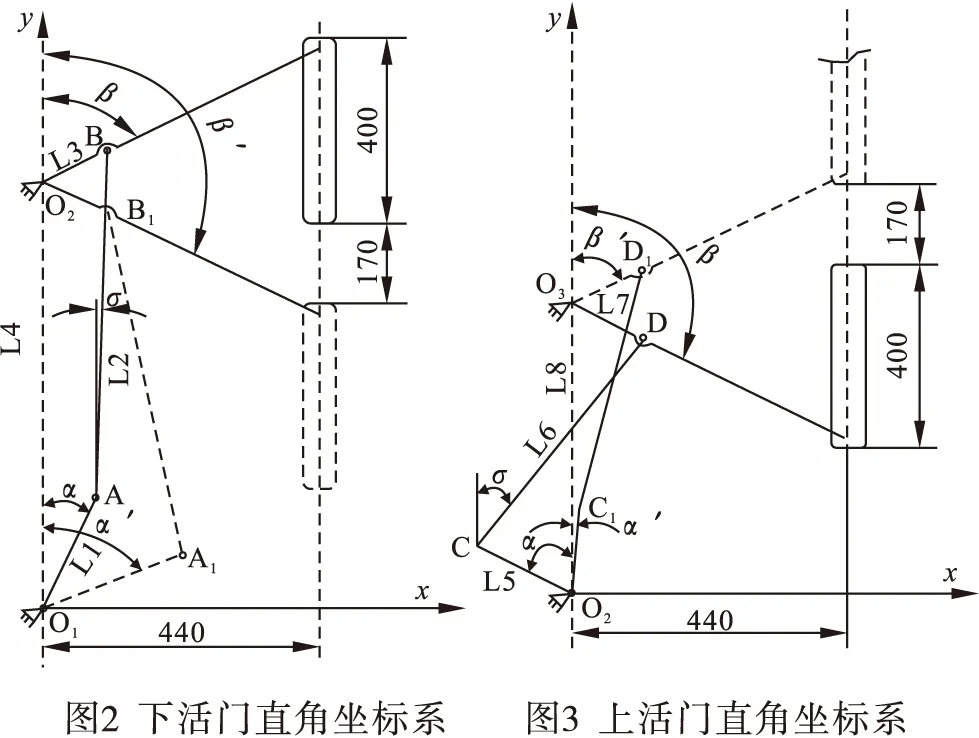
以上活门为研究对象建立直角坐标系,图3为上活门直角坐标系,实线为活门关闭位置,虚线为活门打开位置。
图3中O2CDO3组成封闭四边形,按活门关闭位置各杆件在坐标轴x和y上的投影,可以得到以下方程式:
L5cosα+L6cosδ+L7cos(π-β)=L8
(5)
-L5sinα-L7sin(π-β)+L6sinδ=0
(6)
将方程式(5)和(6)两边平方,利用cos2δ+ sin2δ=1可得到α、β与各杆件方程式:
(7)
同理可得活门关闭位置时α′、β′与各杆件方程式:
(8)
在上述方程式(7)、(8)中,根据实践经验令L5=180mm、L8=620mm,根据图1、图3已标注的尺寸,可计算出α=62.93°、β=122.93°、α′=2.93°,β′ =57.07°。将已知量代入方程式(3)、(4)中可求得:L6=538.64mm、L7= 155.68mm。
5 平移式活门机构干涉验证
见图1,当可移开部件项2推进160mm时,可计算出下活门机构主动杆顺时针旋转46.50°,用作图法可验证动触头项15与上下活门是否存在干涉。图4、图5分别为上下活门干涉验证图,图4中下活门向下垂直移动79mm,图5中上活门向上垂直移动119mm,均大于动触头项15半径50mm,不存在干涉。

6 结语
本文根据笔者多年从事中压开关柜设计的实践经验,结合平面四连杆机构解析法设计理论,通过定量计算得出杆件的实际长度,并经过作图法验证其正确性。
本设计方法对其它可移开式开关柜的平移式活门机构的设计也具有实际的借鉴作用。
The Design of Translation Type Shutter Mechanism for KYN61-40.5 Removable Type Switch Cabinet
YANGZhi-zhong
(Zhejiang Switchgear Factory Co.,Ltd.,Quzhou 324000,China)
The shutter mechanism is a essential device of removable type switch cabinet for anti electric shock.It can ensure the safety of maintenance personnel when the removable parts are pulled out of the cabinet body.With an example of KYN61-40.5 removable type Switch Cabinet,the author detailed introduces design requirements,working principle,rod length calculation methods and interference verification for the translation type hutter mechanism.
shutter translation type hutter mechanism;rod length calculation;interference verification
1004-289X(2016)03-0045-03
TM59
B
2016-02-01
杨志忠(1966-),本科学历,浙江开关厂有限公司工程师,从事中、低压开关设备的研发设计工作。
