基于自整定模糊PID的多电机同步控制策略研究
2017-03-28赵硕伟杨振元关艳翠
赵硕伟+杨振元+关艳翠
摘 要:本文主要针对多电机同步控制,采用先进技术设计了一种能够进行参数自整定模糊PID多电机同步控制策略。在研究的过程当中,将传统的PID控制原理与模糊控制原理进行了有效的结合,并且积极运用了模糊推理判断思想,主要对自整定模糊PID控制器,在参数变化而形成不同偏差变化率、速递偏差的多电机实时变化中所产生的效果进行了分析研究。最终通过仿真结果的分析发现,该种策略具有速度快、稳定性好、高同步精度、动态性好等诸多优势。
关键词:自整定模糊PID;多电机同步控制;模糊控制
DOI:10.16640/j.cnki.37-1222/t.2017.04.169
0 前言
在多电机同步控制当中能够应用到诸多先进的控制理论,其控制内容一般包括主从控制、同一输入控制、等状态耦合控制、交叉耦合控制等多个方面。其中,交叉耦合控制能够使临近的两台电机进行交叉耦合,有助于简化偏差耦合控制。另外,若运用可变增益的PID控制方法,将能够尽量解决系统响应当中的快速性和超调量之间的矛盾,具有重要积极意义。为此,有必要在基于自整定模糊PID的情况下对多电机同步控制策略进行研究。
1 自整定模糊PID控制器设计
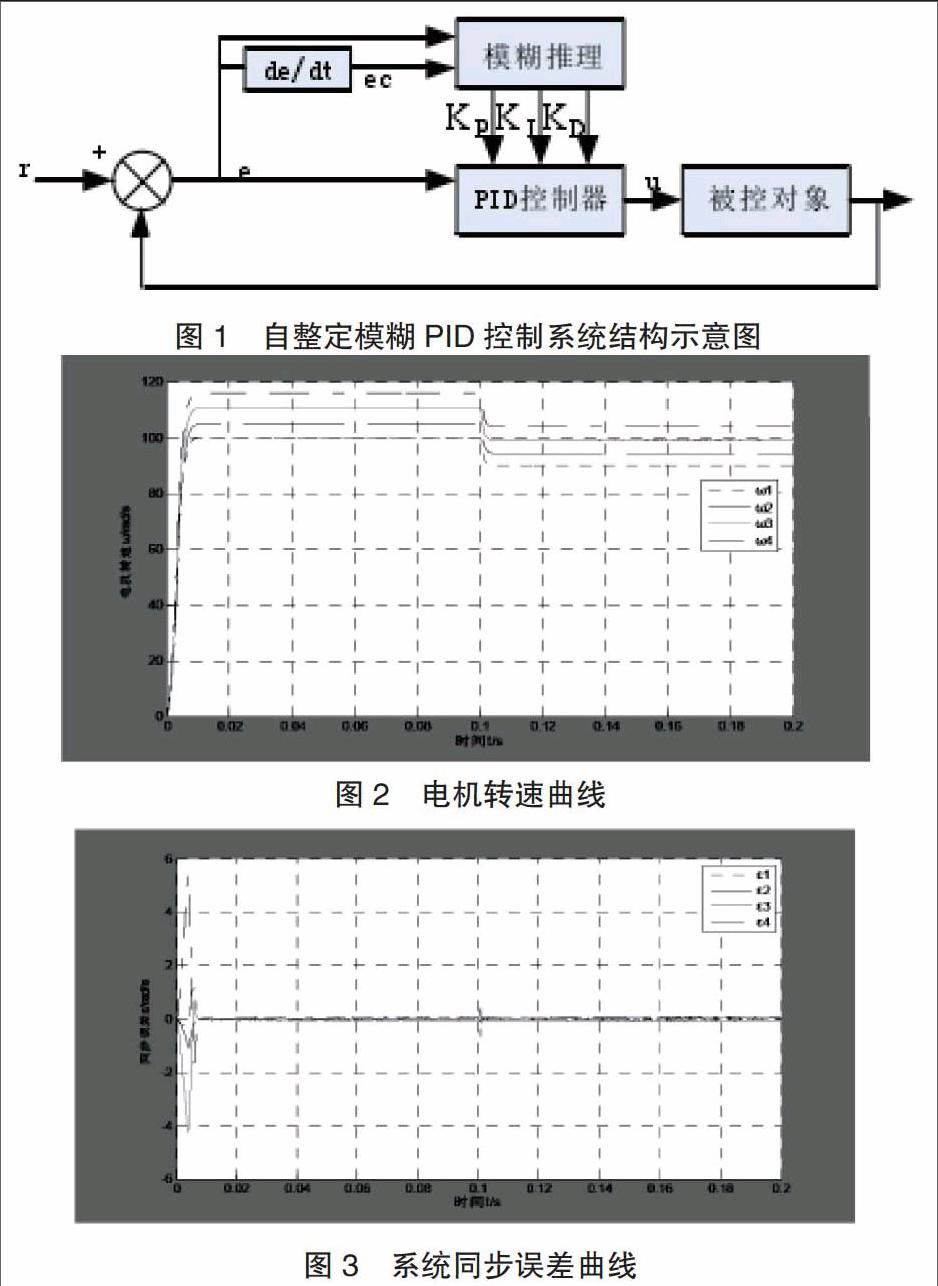
本文在设计的过程中将传统PID控制与模糊控制进行了有效的结合,形成了自整定模糊PID控制器,基本如图1所示。
该系统结构当中的PID参数主要根据其初始值进行自整定而得出,其中KP、KI和KD分别为根据模糊理论所推理而得出的自调整量,其初始值分别为KP0、KI0和KD0。若将误差设置为e,将误差变化率设置为è,则通过整个系统当中的PID参数不自调整量与量化因子相乘,结合模糊化体现模糊变量,将能够得出负大、负中、负小、零、正小、正中、正大几种结果[1]。再结合模糊论域以及隶属度函数、三角函数,将能够得出49条模糊规则。将通过模糊理论得出的模糊结果,利用反模糊化重心法进行模糊的解释,并且将KP、KI和KD的精确值进行转化后,将能够得到相应的PID控制器实时参数[2]。
2 改进型环形交叉耦合控制结构
对改进型环形交叉耦合控制结构进行分析时发现,若多电机系统当中存在的诸多电机之间转速能够形成一定的比例,与此同时,通过其形成的转速比例与同步系数进行相比,将能够得到相应的相邻两个电机之间所产生的同步转速误差。若将整个同步控制系统分为多个子系统,则可以将每一台电机与其相邻的两台电机进行相互关联。針对每一个子系统,必须要保证对其误差进行跟踪,且保证同步误差始终保持在0左右。通过该种方式将能够保证整个控制系统能够按照规定的比例进行运行,且每一个子系统能够与整个系统均保持同步。
3 分析仿真结果
构建4台电机所组成的多电机同步控制系统仿真模型,各电机参数基本为:额定转速为2500r/min,额定功率为1.5kW,永磁磁链为0.104Wb,极对数为4[3]。此时,可以选择误差e,和误差变化率è进行模糊PID控制器输入,进而通过跟踪误差控制器设置相应的初始值。经过多次的仿真实验,将KP、KI和KD和e、è的变化范围均予以确定,进而选取比例系数,将其治愈跟送误差控 制器当中计算同步误差。自整定PID模糊控制器能够对不同时刻在PID3个参数,以及e和è之间的模糊关系进行查找。正在整个控制系统运行的过程当中,可以对e和è进行不断的检测,并且根据模糊控制思想,可以对KP、KI和KD3个参数进行实时的修改。此时,基于自整定模糊PID控制的相邻交叉耦合控制结构,将能够在多电机比例协同控制系统当中,通过计算机技术形成仿真曲线,如下图所示。
根据图2和图3的仿真曲线结果可以发现,本文所提出的给予自整定模糊PID的多电机同步控制系统当中,各个电机若能够在0.01s的时候进入到稳定的状态,则整个系统将在运行的动态过程当中并不会产生十分明显的超调。同时,若本系统在同步控制当中所产生的误差低于5%,则在该系统出现降速时会出现1%以内的同步误差,但是其恢复稳定比较迅速。由此可见,基于自整定模糊PID的多电机同步控制系统,能够具有比较强的抗扰性,且能够有效改善该系统性能。
结论:本文将传统的PID控制与模糊控制进行了有效结合,设计了自整定模糊PID控制器。通过不断的仿真实验且对仿真结果进行分析后发现,改进型的环形交叉耦合结构模糊PID控制算法,能够对同步控制精度进行良好的把握,且能够有效控制同步速度,便于实现多电机的同步控制,具有比较良好的实际应用效果。
参考文献:
[1]侯崇升.基于自适应模糊PID的钢板横剪生产线多电机同步控制系统设计[J].制造业自动化,2013,17(07):50-53.
[2]付光杰,林雨晴,崔海龙.基于模糊自整定PID的永磁同步电机矢量控制[J].化工自动化及仪表,2015,07(11):739-741.
