潜油电泵排水采气PID控制技术的研究
2017-03-27赵军伟王亚坤石海亮
赵军伟 王亚坤 石海亮
(1.大庆油田力神泵业有限公司作业分公司;2.大庆油田力神泵业有限公司销售公司)
潜油电泵排水采气PID控制技术的研究
赵军伟1王亚坤1石海亮2
(1.大庆油田力神泵业有限公司作业分公司;2.大庆油田力神泵业有限公司销售公司)
潜油电泵作为排水采气的一种常用的机采方法,将气井井筒中常有的凝析液或地层水的积液不断地排出至地面,将气层生产压差维持在一定水平。产气时的压差控制越稳,越有利于长时间采气,但生产过程中压差在不断变化,因此需要控制电潜泵的转速,进而控制电潜泵的排量,可以达到节能效果,研究利用井下压力计与变频器之间构成闭环控制,采用PID控制技术,自动寻找最佳稳态工作点,提高生产效率,减小潜油电泵的启、停次数,减小电能损耗,延长机采寿命,提高排采煤层气的稳定性。
潜油电泵;排水采气;PID控制
潜油电泵用于煤层气开采已经有一定的发展历史,其特点是见效快,但应用于排水采气的电潜泵排量一般较小,容易受气体影响[1]。因而易造成气锁或经常欠载停机,泵效降低,同样能耗增加,这样难以保证产气层所需的生产压差,造成产气不连续,浪费电能,同样电潜泵在反复的启、停过程中,寿命也会急剧减短。总体上看,生产效率降低,采气成本增加,因此可以利用变频器与井下压力计[2],研究一种可以自动稳定井下液面高度的控制方法,以保证电潜泵连续运转,确保连续采气经济效益最大化。
1 系统控制方法
在工业应用中,PID控制技术是应用最广泛的算法之一,井下压力计作为反馈信号,经过滤波及PID算法,控制变频器频率,达到控制煤层气井动液面高度,最终目的保持井下产气生产压差。多数变频器有自带PID功能,只能设定简单的积分、微分、比例系数等,但在逻辑编程及信号滤波方案上有很大的局限性,不能按照特定的方法实现对被控目标的有效控制,因此采用单片机作为中间控制系统,方便更改控制逻辑及滤波方案,借助于变频器及井下压力计的通信端口[3],采用通讯系统构成闭环控制,按照被控对象的变化特性,可以方便的加入特定的控制思想,实现对被控目标的准确控制,控制系统框架如图1所示。
该系统通过MODBUS协议读取压力计测量数据[4],滤波后,进行PID运算,再通过MODBUS协议控制变频器运转频率,进而控制电潜泵的排量,达到稳定液面高度的目的,保持连续产气的生产压差,减小因抽空或气锁造成电泵停机,进而动液面升高,阻止煤层气排气。
2 PID算法研究
PID控制是一种二阶线性控制器,通过调比例,积分微分系数,使系统获得比较好的闭环特性,基本控制原理如图2所示。
PID基本算法分为两大类:位置式PID和增量式PID,通常采用哪种算法,取决于输出与执行机构的关系[5-6]。位置式PID控制算法的缺点:当前采样时刻的输出与过去的各个状态有关,计算时要对偏差值进行累加,运算量大;而且控制器的输出对应的是执行机构的实际位置,如果计算机出现故障,控制器输出的大幅度变化会引起执行机构位置的大幅度变化。增量式PID是指数字控制器的输出只是控制量的增量,采用增量式算法时,计算机输出的控制量对应的是本次执行机构位置的增量,而不是对应执行机构的实际位置,因此要求执行机构必须具有对控制量增量的累积功能,适合变频器对根据被控对象的变化,实现频率的累积调整,因此采用增量式PID算法。
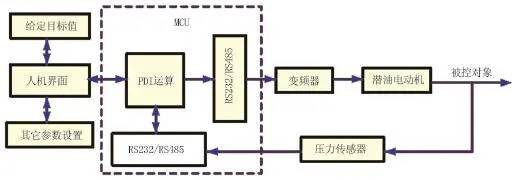
图1 PID闭环控制系统

图2 PID基本控制原理
2.1 增量式PID控制算法与实际被控对象的结合
增量式PID算法,只控制误差增量,其输出是本次执行机构的增量,因此比较适合电潜泵变频器调频控制规律,即每次调节量要小,使电潜泵工作状态变化控制在一定范围内。
增量式PID控制简化表达式:

式中:ΔU(k)——控制器执行机构变化增量;
e(k)——设定值与被控目标间偏差值;
e(k-1)——相对于 e(k)前一次设定值与被控目标间偏差值;
e(k -2)——相对于e(k -1)前一次设定值与被控目标间偏差值;
K1——e(k)的调节深度系数;
K2——e(k-1)的调节深度系数;
K3——e(k-2)的调节深度系数。
从式(1)中看出,只要求出前后三次误差值,即可求出本次输出调节值。在PID控制介入时,通过调节比例、积分、微分系数关系式计算出频率的调节量,比例控制其控制器的输出与偏差输入成比例关系,一旦偏差产生,控制器立即控制输出频率,使被控目标偏差减小,而积分控制可以消除稳态误差,即使很小的误差通过积分作用,也可消除,而微分控制可以提前使控制误差的作用等于零,从而避免被控目标发生严重的超调。
因被控对象为压力值,反应的是液面的高度,在变频器执行动作命令后,液面变化有很明显的迟滞性,单次采样数据具有一定的波动性,也可能具有某种偶然的扰动,因此全程单纯地采用PID控制,会频繁的控制变频器输出频率,不利于稳定的工作状态,因此可以结合模糊控制,在偏差量较大时采用人工设定条件的模糊控制,在接近被控目标值时改为PID控制。
2.2 采样滤波与量化
2.2.1 滤波方法
为消除采样值的误差,可以在n(n为整数)倍的采样周期时刻附近,连续采样 N(N为奇数)次被控目标值,采用冒泡法排序,去掉最小和最大值,剩余N-2个采样值求平均值,如下式:

式中:c(t)——当前时刻采样滤波后测量压力值;
N——连续采样个数;
c(k)——采样值;
c(k)max——采样值中最大值;
c(k)min——采样值中最小值。
井下压力偏差值是给定值与实际采样值之差,如下式:

式中:e(t)——井下压力偏差值;
r(t)——给定目标值。
2.2.2 量化标准
将电潜泵的泵挂深度H对应液柱产生的压力量化为100%,控制目标压力为h%,设置变频器频率上、下限( fmax、fmin),设置频率变化步长Δf,当前频率 fx,预控制区起始点压力为 h1%,Δh为死区控制范围。
2.3 结合煤层气生产特点的控制逻辑
煤层气排采过程中要求井下动液面越低越好,这样利于气体排出,因井下液体不断补充到套管中,因此需要潜油电泵持续排出液体,将井下动液面维持在一定的高度,便于气体排出,但电泵的排采量大于地层补液能力,持续定速运转会抽空或气锁而欠载停机,这样井下液面会重新升高,阻止气体排出,这样利用井下压力传感器,反馈液面高度信息,控制变频器频率,进而控制电泵排量,达到稳定动液面高度为预设值,要求动液面高度尽量低,但又不能抽空,便于持续排采煤层气。
在动液面高于设定液面高度时,以特定频率增量,以特定周期增加变频器频率,快速达到电泵最大排量,使动液面快速下降,使气体尽快排出,待接近控预设液面高度时,进行精细控制,因此整个控制过程如下:
1) 当 e(k) <0,且 c(k)≥h1%时→模糊控制(以特定步长Δf,且定时长T,逐渐增加频率至fx, fx≤ fmax),此时动液面实际值高于预控液面高度h1%,提频率增排量,快速降低动液面,使气体尽快排出。
2)当e(k)<0, c(k)≥h%与Δe(k)>0三者同时成立时→进入预控区后,实际液面高度未达到预设值,同时液面继续下降的情况下,频率由 fx预减速至 f,且 f≥fmin, fmin对应预控目标 h%,量化后按PID控制规律进行预减速控制,因涉及到系统稳定性,不可频繁控制,设定好控制周期,在接近目标控制值时可加入死区控制,增强稳定性。
3)当 e(k)<0, h%≤c(k)<h1%,且 Δe(k)小于0→在预控区内,该频率运行时,液面回升的情况下,为尽量减小控制的频率,可不控制,待液面高度回升跑出预控区后,按控制区外模糊控制方法进行控制直至再次回到预控区。
4)当e(k)>| Δh|>0时,其中Δh为控制点h%处死区,当频率下降至最小值后,相应电泵排量为最小值时,液面高度下降至设定点后,仍继续下降,此时按井下传感器压力报警或停机信号处理。
5)进入预控区后, e(k)=Δd,Δd接近零,为误差充许值,变频器频率可不做调整,尽量减小变频调整次数,延长机组运转寿命,但预控点h1%与h%区间要设置合理。
3 现场应用节能降耗效果
首先,采用此PID控制方法保持动液面高度,有效避免了潜油电泵因气锁,泵效急剧降低,造成类似空转而产生的能耗,在山西煤气井XZ-6气井应用中,22 kW电泵机组经监测,1 h因气锁浪费电能约为16 kW;采用PID闭环控制后,22 kW电泵机组通过测量,在日产气约500 m3标定下,采用PID控制技术后,可节省电能约112 kW,节能效果显著。
其次,排水采气重要特点是投产初期需要排量大,使气层压力减小,气体尽快排出,后期需要减小排水量,稳定煤层生产压力,开环运行时,电泵运行频率不能自动调节,以适应各段不同生产的需要,在液面下降较快需要降低产量时,应急时降低机组运行频率,达到降低能耗的目的。
4 总结
PID控制是一种优秀的常用工业控制算法,结合模糊控制,按照电潜泵气井液面变化规律,进行分段控制,可将液面保持在一定范围内,延长潜油电泵工作寿命,最大限度保证气井开采时间,提高电潜泵井对煤层气的排采的效率,同时可节省大量的电能。
[1]李国富,田永东.煤层气井排水采气机理[J].中国煤炭,2002,28(07):1-3.
[2]梅思杰,邵永实,刘军,等.潜油电泵技术(上)[M].北京:石油工业出版社,2004:62-64.
[3]蒙丽娜.电泵井下测试系统研究[D].西安:西安石油大学,2010.
[4]肖硕,荆刚,李莉娜,等.单片机数据通信典型应用大全[M].北京:中国铁道出版社,2011:294-306.
[5]白志刚.自动调节系统解析与PID整定[M].北京:化学工业出版社,2012:29-39.
[6]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002:33-45.
10.3969/j.issn.2095-1493.2017.03.001
2016-11-25
(编辑 贾洪来)
赵军伟,工程师,2007年毕业于大庆石油学院(电气工程及其自动化专业),从事潜油电泵运行管理、新技术应用开发工作,E-mail:junwei190920@126.com,地址:黑龙江省大庆市萨尔图区中兴北街58号大庆油田力神泵业有限公司,163311。
