基于元胞自动机和BP神经网络算法的Landsat-TM遥感影像森林类型分类比较*
2017-03-27邢艳秋姚松涛曾旭婧焦义涛
田 静 邢艳秋 姚松涛 曾旭婧 焦义涛
(东北林业大学 森林作业环境研究中心 哈尔滨 150040)
基于元胞自动机和BP神经网络算法的Landsat-TM遥感影像森林类型分类比较*
田 静 邢艳秋 姚松涛 曾旭婧 焦义涛
(东北林业大学 森林作业环境研究中心 哈尔滨 150040)
【目的】针对森林资源遥感监测效果往往受森林类型识别分类方法的影响,提出一种基于元胞自动机的遥感影像森林类型分类方法,以提高Landsat-TM遥感影像的分类精度,为森林资源遥感监测提供技术支持。【方法】以小兴安岭带岭林业经营管理局为研究区,基于2010年Landsat5-TM影像数据和2012年森林资源二类调查数据,采用窗口法获取TM第5波段各待分类别的像元均值作为聚类中心,以元胞自动机的Moore模型为框架,以元胞为基本单位,以像元均值为对象,利用最小距离法求取进化规则(判断准则是中心元胞周围的8个元胞距每类聚类中心的距离最近且像元数量最多,则中心元胞属于该类别),充分考虑影像及地物之间的空间特征,采用元胞自动机分类方法进行森林类型的识别分类。同时,以相同的样本数,采用3层BP神经网络模型对TM遥感影像进行分类试验,并比较2种方法的分类效果。【结果】基于元胞自动机的分类方法总体分类精度为88.712 1%,Kappa系数为0.829 1,针叶林、阔叶林和针阔混交林的用户精度分别为73.60%,92.94%和94.13%,达到了区分针叶林、阔叶林和针阔混交林的分类目的。BP神经网络算法的总体分类精度为86.671 3%, Kappa系数为0.798 4,针叶林、阔叶林和针阔混交林的用户精度分别为69.22%,93.37%和90.76%。2种分类方法均可有效识别森林类型信息。【结论】元胞自动机模型应用于遥感影像森林类型识别分类可弥补因TM影像空间分辨率较低造成的遥感影像分类精度过低的问题,提高分类精度。在森林分布破碎、种类类型多样且结构复杂的带岭林区,该研究结果有助于森林资源监测与管理,可为大区域尺度的森林动态信息监测提供更好的数据及技术支持。
元胞自动机; BP神经网络; 森林类型分类; 像元值; Landsat 5-TM影像
森林是全球生态系统的重要组成部分,森林资源状况及其变化,不仅影响地区乃至全球环境的变化,而且对社会经济的可持续发展影响深远,开展森林资源调查与监测意义重大。遥感影像森林类型分类识别是森林资源调查与监测的重要手段,也是国家森林资源保护和管理的重要决策技术支持(贾坤等, 2011; 刘华等, 2012),其中,分类方法是遥感影像森林类型分类识别的重要内容,分类方法的提高直接制约着森林类型信息的获取。因此,选择合理的分类方法是提高森林类型分类精度的关键。
由于林区特殊的地理环境和生物分布特点,森林植被的光谱特性普遍存在“同物异谱”及“异物同谱”现象;而且混合像元严重影响森林植被分类精度,错分和漏分现象也普遍存在(Sunetal., 2014)。为了提高森林植被的分类精度,国内外许多学者进行了大量森林遥感分类研究,如李永亮等(2010)将高光谱特征参数作为输入层,森林树种类别作为输出层,构建BP神经网络开展森林分类研究,得出马尾松(Pinusmassoniana)成熟林及樟树(Cinnamomumcamphora)幼龄林的分类精度达100%,样本分类综合精度达93.3%; 袁金国(1999)采用植被指数进行森林植被遥感分类研究,证明垂直植被指数PVI(perpendicular vegetation index)可区分针叶林和阔叶林,且不同针叶树种间分类可采用比值植被指数RVI(ratio vegetation index); 严恩萍(2010)使用ALOS(advanced land observing satellite data)遥感数据提取归一化植被指数NDVI(normalized difference vegetation index)并进行主成分分析,进而利用改进的决策树方法提取广西平南县内的阔叶林信息,取得了较高的分类精度;Brenner等(2012)采用Landsat5-TM数据对墨西哥索诺拉沙漠的牧场进行分类,发现采用多尺度分割方法的结果优于基于像元决策树分类的结果;Goodenough等(2003)使用Hyperion、ALI 和ETM+3种遥感数据对加拿大维多利亚地区的5种森林类型进行识别分类,结果表明应用高光谱影像的识别分类精度高于多光谱影像,其最高分类精度达90.0%; 竞霞等(2008)结合分区和多时相遥感数据对密云山区森林植被进行分类研究,结果证明该方法具有明显的技术优势。以上分类方法均是在像元尺度上以光谱信息为主要依据进行分类,或者采用传统的参数化统计分类方法,一方面需要处理的图像数据量非常大,另一方面忽略了影像的空间结构信息及相邻地物之间的相互影响,因此分类结果中不仅出现了误分现象,尤其是波谱信息类似的地类错分现象普遍存在,而且各个分类内部产生了椒盐噪声,不利于后续的分类结果分析,分类精度远不能满足要求。Deutsch(1972)、Sternberg(1980)等将元胞自动机(cellular automata,CA)理论引入到图像处理和模式识别中,由于元胞自动机的空间结构与图像非常相似,并且其演变规则具有局域性,因此很容易用于并行化处理机的实现,是图像处理的一个非常好的工具,如柯新利等(2010)利用CA开展了土地利用动态变化的模拟研究、Clarke等(1997)利用CA分类器模拟了美国旧金山地区的城市发展、凌峰等(2005)基于CA理论研究了遥感影像混合像元亚像元定位的问题、Chattopadhyay等(2000)基于加性CA的属性提出了分类问题的解决方案、滕刚等(2010)提出了基于元胞自动机各向异性扩散模型的图像分割算法等。
为了模拟生物学中的自复制行为,20世纪50年代冯·诺依曼(von Neumann)提出了元胞自动机系统(Boneetal., 2006),用于模拟空间和时间上都离散的复杂性现象的模型。该系统根据元胞及其邻居的当前状态,依据进化规则确定该元胞下一时刻的状态(Mitsovaetal., 2011)。元胞自动机具有并行高速的特性和空间同质性,同时元胞自动机的空间结构与图像非常相似,可以处理复杂的图像数据集,而且能够充分利用影像的空间结构信息(Yassemietal., 2008),因此,以元胞为基本单位,综合考虑元胞自动机的自迭代过程,可充分挖掘遥感影像信息进而更好探索分类,弥补传统分类方法的缺陷。已有研究使用的主要分类特征有纹理、植被指数、主成分、小波特征、GIS数据等,多是以光谱信息为主要依据。但是,由于同一时相的遥感影像上不同森林类型之间的光谱差异较小,即使用光谱特征如植被指数等也往往难以区分正确,又由于元胞自动机中元胞状态为整数集(对应于0~255之间的一个整数),因此,考虑元胞自动机的特点以及为了避免光谱混淆的影响,本研究分类特征的选取原则为基于遥感影像的像素值信息。
目前,采用元胞自动机模型进行基于Landsat-TM遥感数据的森林类型分类研究还不多见。本研究以小兴安岭带岭林业经营管理局为研究区,结合遥感影像和森林资源二类调查数据,在分析元胞自动机理论的基础上,以元胞为基本单位,以获取的样本信息(像元均值)为对象,利用最小距离法求取CA的进化规则来进行森林类型的分类方法研究,旨在提高Landsat-TM遥感影像的分类精度,为森林资源遥感监测提供技术支持。
1 研究区概况及数据收集与处理
1.1 研究区概况
以小兴安岭带岭林业经营管理局为研究区,地理位置128°37′46″—129°17′50″E,46°50′8″—47°21′32″N,版图大体呈纺锤形,总面积为2 25 4km2。海拔111~1 202 m,坡度0~57°,全年最高气温37 ℃,最低气温-40 ℃,全年无霜期115天,年均降雨量661 mm。林区内植物种类繁多,结构复杂,以天然次生林为主,主要为针阔混交林,呈带状分布。从优势树种看,针叶林主要以落叶松(Larixgmelinii)、红松(Pinuskoraiensis)为主,还有云杉(Piceaasperata)、冷杉(Abiesfabri)、樟子松(Pinussylvestrisvar.mongolica)等。阔叶林主要以柞树(Xylosmaracemosum)、白桦(Betulaplatyphylla)、枫桦(Betulacostata)为主,还有一部分杨(Populus)、榆(Ulmus)、椴(Tilia)等。此外还有三棵针(Berberisamurensis)、刺五加(Eleutherococcussenticosus)等藤本植物。
1.2 数据收集与处理
1.2.1 森林分类系统建立 依据研究区遥感影像的信息可辨识性和《土地利用现状分类》国家标准,结合《森林资源规划设计调查主要技术规定》分类系统,建立面向遥感分类的小兴安岭地区森林二级分类体系。研究区森林资源中的地类和林分类型划分为植被和非植被2个一级类型,植被依据林分组成分为针叶林、阔叶林和针阔混交林3个二级类型,非植被简单归为水体、居民区、耕地和裸土4类。对于未分类地物,统一划分为“其他”类。
1.2.2 遥感数据收集与处理 本研究采用的遥感数据Landsat5-TM是通过美国国家航空航天局(National Aeronautics and Space Administration,NASA,http:∥www.nasa.gov/)获取的,成像时间为2010年9月15日,TM影像有7个波段,各波段参数如表1所示。该时期影像的植被特征较为明显,有利于植被信息提取。使用ENVI5.2软件进行多光谱数据的辐射定标和大气校正。以1∶5万地形图为参考,采用多项式纠正法对遥感图像进行几何精度纠正,几何纠正误差在1个像元内。同时进行正射校正,以消除地形等阴影的影响,并用研究区的边界矢量裁减研究区影像。
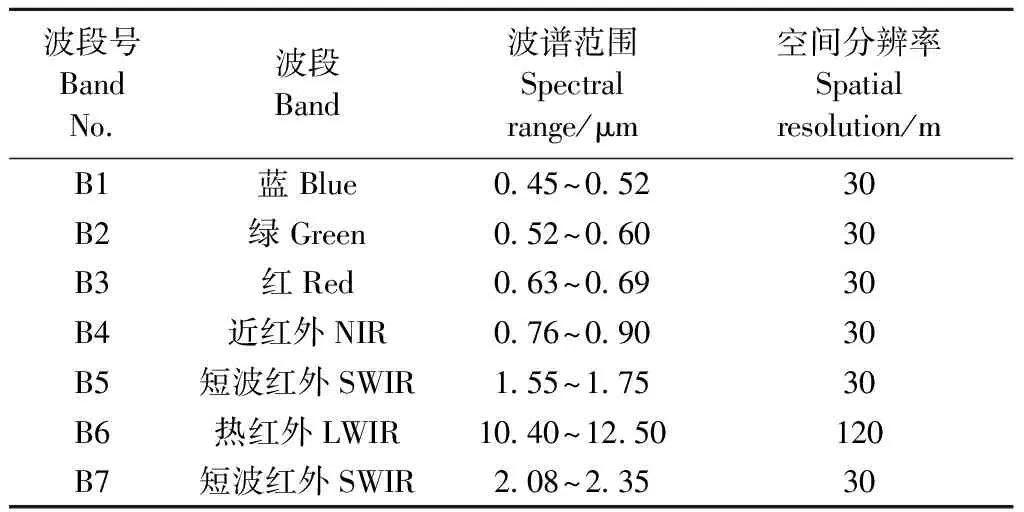
表1 TM各波段参数Tab.1 Band parameters of TM
1.2.3 森林资源二类调查数据 本研究以2012年森林资源二类调查数据为基础数据。该数据详细记录了每个小班内的林分组成、地物类型等信息,本研究用到了其中205个小班内的森林类型(针叶林、阔叶林和针阔混交林)和地物类型(耕地、裸土、居民区、水体)的矢量图层,作为样本信息提取及分类精度验证的数据源。由于森林资源二类调查数据每10年调查1次, 2012年的数据是与本研究所使用的遥感影像获取时间最近的,期间研究区内没有进行大面积的森林采伐及干扰发生,森林覆盖类型的变化微小,因此本研究认为可以忽略其变化。
2 研究方法
结合研究区森林类型分布特点和Landsat5-TM 影像特征,本研究依据《森林资源规划设计调查主要技术规定》提出了一种基于元胞自动机的遥感影像森林类型分类方法,并进行森林类型分类研究。同时,为了评价元胞自动机分类方法的分类结果和分类精度,采用BP神经网络算法对研究区影像进行森林类型识别,并比较和评价2种分类方法的分类效果。
2.1 元胞自动机森林类型分类思想
元胞自动机是一种时间、空间和状态都离散的网格动力系统。不同于一般的动力学模型,元胞自动机不是由严格定义的物理方程或函数确定,而是由一系列模型构造的规则构成,凡是满足这些规则的模型都可以算作元胞自动机模型。因此,元胞自动机是一类模型的总称,或者说是一个方法框架(Ganguly, 2003; Matheyetal., 2008)。
构成元胞自动机的基本单位是散布在规则格网中的每一元胞,且均取有限的离散状态,遵循同样的作用规则,依据确定的进化规则做同步更新进而得到所有元胞在某时刻的状态全体,即元胞自动机的一个构型(configuration)。基本要素由元胞、元胞状态、元胞空间、邻居和规则组成(Wolfram, 1983; Paul, 2006),可用一个四元组来表示:
(1)

元胞自动机的状态由所有元胞相互作用形成,每个元胞下一时刻的变化由其初始状态和邻居元胞对其的作用共同决定(Kocabasetal., 2006; 王海军等, 2010)。由于1个元胞对应1个像元,并且其演变规则具有局域性,因此元胞自动机很容易用于并行化处理机的实现,可应用于遥感图像处理中。
应用元胞自动机模型进行森林类型分类时,依据编码规则将待分类二进制的TM影像加载到元胞自动机网络上,这个二进制图像是元胞自动机的初始化全局状态,元胞自动机随时间按照量化规则进化到稳定的全局状态,此时原始影像将被正确分类。
2.2 样本数据的获取
考虑元胞自动机与图像的相似性及其本身的特点,并对灰度图像进行分类,因此本研究使用像元值(灰度值)数据作为样本数据。


图1 样本统计Fig.1 Histogram of samples
2.3 基于元胞自动机的森林分类体系的建立
应用元胞自动机模型进行森林类型分类,其演化过程与非植被类型的识别是同时进行的,主要包括获取各类别聚类中心clustern和进化规则f的定义2部分。本文参与分类的原始数据为TM影像的像素值矩阵L=M×N,L的像元值范围为Pixelvalue=max[p(i,j)]×min[p(i,j)],M,N分别为待分类TM影像的行列值,i∈M,j∈N,p(i,j)表示元胞的像素值,max[p(i,j)],min[(p(i,j)]分别表示像素值矩阵中的最大和最小像素值。根据待分类TM影像的特征,同时结合森林资源二类调查矢量数据,依据本文所建立的分类系统,确定森林类型和非植被类型共7个聚类以及各聚类中心的像元均值clustern,并满足clustern∈{max[p(i,j)],min[p(i,j)]}。为了确定中心元胞的类别,首先需要确定其周围元胞的状态,即每个邻居元胞属于哪个聚类中心,如果邻居元胞中属于第n个聚类中心的元胞个数最多,则中心元胞属于第n类,最后直到迭代结束,TM影像完成森林类型的识别分类。

表2 第5波段各聚类中心的像元均值Tab.2 Pixel mean value of cluster center in 5th band
在元胞自动机的分类方法中,元胞、元胞空间、元胞状态、邻居和进化规则各组分结构参数的确定是非常重要的,直接影响分类精度的高低。因此,将原始待分类TM影像划分为规则的网格,每个网格表示元胞自动机模型中的1个元胞,可以理解为一个个离散的像素点,分布在离散的n维欧几里德空间的格点上。中心元胞为影像空间中的每个像元; 每个元胞的状态对应于7类不同地物类型中的一类; 元胞所分布的空间网点集合即为元胞空间(lattice),其可以是任意维数欧几里德空间的规则划分。为了与TM影像的空间结构相统一,本研究选择二维元胞空间,其大小为原始影像的矩形空间分布L=M×N=1 677×1 935。 在给出进化规则之前,必须定义一定的邻居规则,明确哪些元胞属于该元胞的邻居。由于地物之间存在越相邻的地物相似程度越大,因而距离中心元胞距离不同的邻居,应该对其有不同影响。本研究采用Moore型邻域结构,由中心元胞(要演化的元胞)和其相邻的8个元胞组成,数学定义如下:
(2)
式中:cix,ciy表示邻居元胞的行列坐标值;cox,coy表示中心元胞的行列坐标值;r表示邻居半径值为1。
进化规则是根据元胞当前状态及其邻居状况确定下一时刻该元胞状态的动力学函数,也称为状态转移函数,是元胞自动机的核心问题。
(3)

2.4 BP神经网络的森林类型分类方法
BP神经网络是一种按误差逆传播算法训练的多层前馈神经网络,其学习规则是使用梯度搜索理论,以使得网络实际输出与期望输出均方差达到最小(Welleretal., 2006)。BP神经网络拓扑结构(图2)包括输入层、隐含层和输出层,其基本思想是: 在正向传播过程中,每一层神经元的状态只影响到下一层神经元网络。如果输出层不能得到期望输出,则反向逐次对网络各神经元的权值和阈值进行调节,过程反复进行达到极小值或最小值,网络学习结束(汪少华等, 2011)。

图2 BP网络结构Fig.2 Frame of BP
设网络的某层中第j个节点在给定一个训练样本时,其总输入为:
(4)
式中:Oi为上一层第i个节点的输出;wij为上一层第i个节点与本层第j个节点的连接权值。
对于输入层,任何节点的输入与输出均相等。上述第j个节点的输出是其总输入的一个变换,记其输出为Oj,并可作为下一层神经节点的输入之一:
(5)
设输出层第j个节点的期望输出为Tj,则可以得到输出误差Tj-Oj,将该误差从输出层反向传播回去,并在传播中依据修正原则对权值wij进行不断调整,使误差不断减小(Verbekeetal., 2004)。
运用BP神经网络算法进行森林类型分类时主要包括2个阶段:第1阶段是网络对样本数据进行自学习,以获得优化的连接权值矩阵; 第2阶段是利用学习结果对整个TM影像数据进行分类。
3 结果与讨论
3.1 元胞自动机森林类型分类结果
根据研究区的地物空间分布特征及各类别在TM影像的可分性,以区分森林类型为目的,并依据TM影像第5波段所含信息量最大的特点,获取各类别的聚类中心。采用元胞自动机模型,以元胞为基本单位,以像素均值为对象,利用最小距离法求取元胞自动机进化规则,获得各中心元胞的状态,得到研究区森林类型分类结果如图3所示。

图3 元胞自动机分类结果Fig.3 Cellular automata classification result
采用混淆矩阵分析法对分类结果进行精度评价。研究区遥感影像分类精度分析应用分层随机采样方法,对照数据以2012年森林资源二类调查矢量数据为主。按照平均分布的原则,选取669个验证样本(针叶林184、阔叶林139、混交林198、水体37、居民地34、耕地41、裸土36)建立混淆矩阵,得到元胞自动机分类方法的精度评价如表3所示。
3.2 BP神经网络算法森林类型分类结果
为了客观地与元胞自动机分类结果进行比较,以相同的样本数目(输入数据为多波段的像元值)及分类系统,采用3层反向传输BP神经网络算法进行森林类型的识别分类。输入层节点设为3(参与分类的波段选为4,3,2);输出层节点与所分类别的数目相同设为7,输出层的每个节点对应1个地类;隐含层节点根据经验确定为16;传递函数采用Sigmoid(Log Sigmoid)激活函数。经过反复训练,设定训练阈值的贡献为0.95,训练率为0.3,训练次数为1 000,最大个体允许误差为0.05,最后输出得到分类结果见图4,精度评价如表4所示。
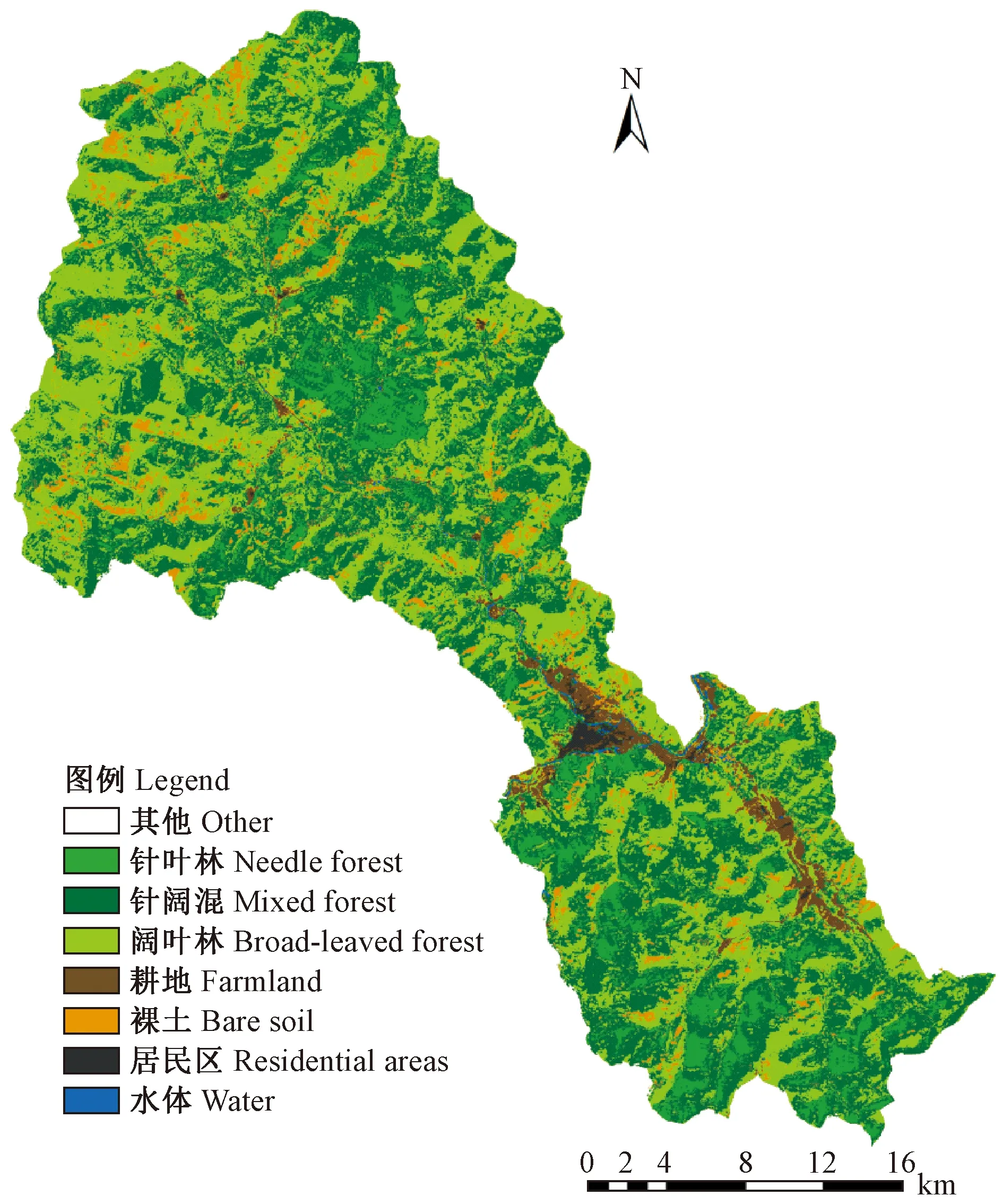
图4 BP神经网络算法分类结果Fig.4 BP classification result
由于元胞自动机运行过程中读取的是影像灰度值矩阵,因此聚类中心选取原则为单波段的灰度值。但是为了更好地获得BP神经网络算法的分类结果,同时结合BP神经网络的特点,输入层采用组合波段的分类特征。
3.3 分类精度评价
3.3.1 元胞自动机分类精度评价 由表3和表4可知,基于元胞自动机的分类方法总体分类精度为88.712 1%,Kappa系数为0.829 1;BP神经网络算法的总体分类精度为86.671 3%, Kappa系数为0.798 4。这表明2种分类方法均可有效识别森林类型信息,且精度较高。
元胞自动机分类方法中针叶林、阔叶林和针阔混交林的用户精度分别为73.60%,92.94%和94.13%,分类效果较好,达到了区分森林类型的分类目的;而非林地类型中,水体、居民地、耕地和裸土的用户精度分别为100.00%,93.59%,73.74%和72.97%,分类精度较高。因此,非林地能很好地与林地类型区分。
元胞自动机分类结果中,林地的错分和漏分误差总体相对较小,只有针叶林的错分和漏分误差较其他森林类型相对较高,分别为26.40%和12.05%;而非林地分类结果中,耕地的错分和漏分现象较严重,误差分别为36.26%和14.05%。分析其原因:一是研究区地形地貌比较复杂,且存在混合像元现象;二是针叶林、阔叶林和针阔混交林在TM影像第5波段的空间结构信息存在相似性,在3种植被类型交界处又出现了混交现象,特别是针叶林,由于其叶片呈针叶状分布,且单木郁闭度相对较低,单叶片的光谱反射特性与其他森林类型相比相对较弱,进而导致针叶林冠层反射特性总体比其他森林类型低。从元胞自动机分类结果中可以看出,在本研究区,针叶林多分布在地形起伏较大的位置,受山体阴影的影响较严重;同时,研究区的森林类型处于次生演替阶段,早期的针叶树种逐渐被阔叶树种所代替,且生长旺盛,有利于阔叶林的识别。基于以上原因,本研究中针叶林的分类精度较其他类别相对偏低。而耕地的错分和漏分现象,是其在TM影像第5波段与森林植被存在相似性造成的,又由于带岭地区非林业用地实际所占面积较小,主要为森林用地,因此单位像元内耕地所占面积过小,从而导致分类误差较大。总体来说,利用中等分辨率的TM影像进行分类时,实际地物占单位像元的总面积过小,很容易被混淆为占据单位面积比例较大的地物。在森林分布破碎、种类和类型多样、结构复杂的带岭林区,该结果可满足林业经营管理的需要。
基于元胞自动机的遥感影像分类方法对样本数据的选取以及进化规则有一定要求,即能够准确获得初始元胞的状态和状态转移函数,才能保证分类的精度。同时需要指出的是,影响利用元胞自动机方法进行遥感影像森林类型识别的主要限制因子在于样本数据的误差大小和进化规则的获取方法。

表3 元胞自动机分类方法精度评价Tab.3 Cellular automata classification accuracy evaluation
经过以上对分类精度的分析可知,基于元胞自动机分类方法的优势主要表现在以下3方面:
1) 元胞自动机具有模型简单、运行速度快、处理效果好等优点,并且元胞状态只取有限个离散值,相对于连续状态的动力系统,其不需要经过粗粒化处理就能转化为符号序列,且样本参数少,减少了分类前的准备工作,提高了工作效率和信息提取精度。
2) 元胞自动机分类方法以像元为基础,充分利用了像元之间的空间相关性,能够考虑相邻地物之间的影响,避免了光谱混淆造成的分类误差影响,对噪声有较强的抑制作用,可以过滤以独立像元存在的噪声,改善了分类效果。
3) 元胞自动机具有并行高速处理的特性,可以处理大量的数据集,并且能将复杂的非线性问题转化为简单的线性问题,易于获取进化规则。
基于以上优势分析,元胞自动机分类方法可适用于中等分辨率且地物复杂的大范围地区遥感影像的分类,为大面积的森林资源监测提供了一条有效途径。
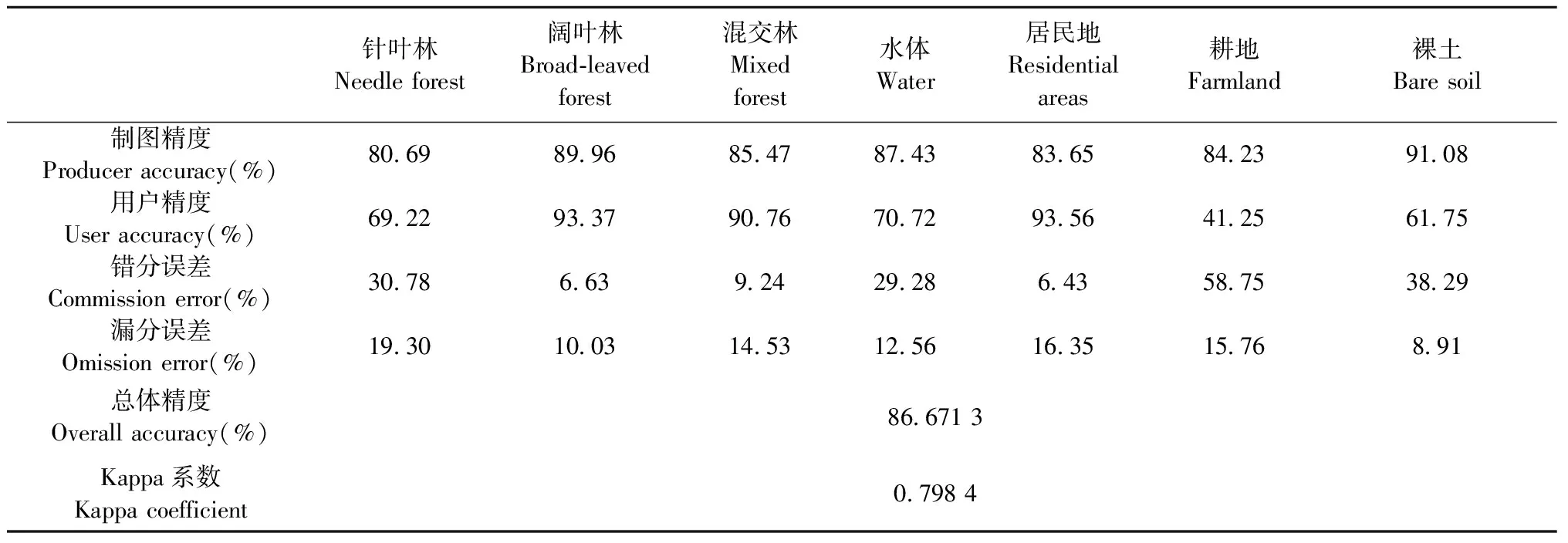
表4 BP神经网络分类方法精度评价Tab.4 BP classification accuracy evaluation
3.3.2 BP神经网络算法分类精度评价 BP神经网络分类方法结果表明,该方法能够较好地区分林地和非林地,其中阔叶林和针阔混交林的分类效果较理想,用户精度分别为93.37%和90.76%;针叶林存在错分和漏分现象,用户精度较低为69.22%,主要是针叶林受地形条件影响较严重。总体分类精度略低于元胞自动机2.040 8%,主要原因是森林类型之间的光谱差异小,山区地形复杂,造成“同谱异物,同物异谱”现象。另一方面,BP神经网络算法的样本数据获取过程相比元胞自动机复杂,前期工作量较大,降低了样本的质量,而输入层数据的维数和规模又较大,影响了网络的训练效率,运行速度较慢,进而降低了基于光谱信息的分类质量。
BP神经网络算法的优势体现在计算过程大量并行、高速分布、能高速处理大量数据,对数据类型、分布函数和相关性没有苛刻限制,能实现各种非线性映射和求解各种十分复杂和高度非线性的分类问题。
4 结论
本研究基于小兴安岭带岭林管局Landsat5-TM遥感数据和2012年森林资源二类调查数据,采用相同的样本数,分别利用元胞自动机和BP神经网络算法对研究区的森林类型信息进行了识别提取,元胞自动机方法的总体精度达到88.712 1%,Kappa系数为0.829 1; BP神经网络算法的总体分类精度为86.671 3%,Kappa系数为0.798 4。2种方法的分类精度均较高,达到了识别森林类型信息的分类目的,并分别获得了研究区的森林类型分布图。
元胞自动机方法充分考虑了影像的空间结构特征以及相邻地物之间的相互影响关系,其以元胞为基本单位,以单波段像元均值为对象,采用最小距离法求取进化规则进行演化,可有效降低光谱混淆引起的漏分和错分现象,分类精度较高;同时,样本数据的维数低、参数少,使得网络的运行速度较快。
BP神经网络分类方法能利用已知类别遥感图像样本集的先验知识,自动提取识别规则; 但获得的样本数据维数较高,数据量大,为多波段的像元均值。其自适应能力强,能够解决信息缺失的问题,且能充分利用原始影像的光谱信息。
由于Landsat-TM影像的空间分辨率相对较低,研究区内针叶林、阔叶林和针阔混交林的分布存在交叉现象,导致利用森林资源二类调查数据获取的样本中存在误差,利用进化规则进行演化时影响最终的分类结果。为了获得更高的分类精度,需要在后续研究中对样本数据获取方法进行更深入的探讨,或者可以进一步考虑引入地学知识(海拔、坡度、坡向)和植被指数等数据进行分类。为了获得更详细的森林资源监测信息,采用元胞自动机方法,在森林类型分类基础上,可以考虑加入林龄和郁闭度信息作为分类条件。
应用BP神经网络算法进行森林类型分类时,为了保证网络的稳定性和分类精度,可以考虑在算法上进行改进,同时可加入各种辅助信息(地理信息、地学信息)以提高分类精度。
本次分类方法采用的分类规则及阈值具有区域适用性,是针对试验区的影像及地物特征所指定的,应用于其他区域的影像分类时,需要根据实际情况进行相应的调整。
贾 坤,李强子,田亦陈,等.2011. 遥感影像分类方法研究进展. 光谱学与光谱分析,31(10): 2618-2623.
(Jia K,Li Q Z,Tian Y C,etal. 2011. A review of classification methods of remote sensing imagery. Spectroscopy and Spectral Analysis,31(10): 2618-2623. [in Chinese])
竞 霞, 王锦地, 王纪华, 等. 2008. 基于分区和多时相遥感数据的山区植被分类研究. 遥感技术与应用, 23(4): 394-397.
(Jing X, Wang J D, Wang J H,etal. 2008. Classifying forest vegetation using sub-region classification based on multi-temporal remote sensing images. Remote Sensing Technology and Application, 23(4): 394-397. [in Chinese])
柯新利,邓祥征,何书金.2010. 地理元胞自动机模型的尺度敏感性及原因.地理研究,29(5): 863-872.
(Ke X L, Deng X Z, He S J. 2010. Scale sensitivity and its causality for geo-cellular automata modelling. Geographical Research, 29(5): 863-872.[in Chinese])
李永亮,林 辉,孙 华,等.2010.基于BP神经网络的森林树种分类研究.中南林业科技大学学报,30(11): 43-46.
(Li Y L, Lin H, Sun H,etal. 2010. Study on forests species classification based on BP neural network. Journal of Central South University of Forestry & Technology, 30(11): 43-46. [in Chinese])
凌 峰,张秋文,王 乘,等.2005. 基于元胞自动机模型的遥感图像亚像元定位.中国图象图形学报,10(7): 916-921.
(Ling F, Zhang Q W, Wang C,etal. 2005. Sub-pixel mapping of remote sensing images based on cellular automata model. Journal of Image and Graphics, 10(7):916-921. [in Chinese])
刘 华,陈永富,鞠洪波,等.2012.美国森林资源监测技术对我国森林资源一体化监测体系建设的启示. 世界林业研究, 25(6):64-68.
(Liu H, Chen Y F, Ju H B,etal. 2012.Inspiration of forest resources monitoring in USA for integrated forest resources monitoring system in China. World Forestry Research,25(6):64-68.[in Chinese])
滕 刚,陈 玉,吴 倩. 2010. 基于元胞自动机各向异性扩散模型的图像分割算法. 计算机工程与设计,31(16): 3666-3669.
(Teng G, Chen Y, Wu Q. 2010.Image segmentation based on lattice Boltzmann anisotropic diffusion model. Computer Engineering and Design, 31(16): 3666-3669. [in Chinese])
王仲君,王能超,冯 飞, 等. 2007.元胞自动机的演化行为研究.计算机应用研究,24(8): 38-41.
(Wang Z J,Wang N C, Feng F,etal. 2007. Research on evolved behavior of cellular automata. Application Research of Computers,24(8): 38-41.[in Chinese])
王海军,张文婷,贺三维,等. 2010. 利用元胞自动机和模糊C均值进行图像分割.武汉大学学报:信息科学版,35(11): 1288-1291.
(Wang H J, Zhang W T, He S W,etal. 2010. An image segmentation method based on cellular automata and fuzzyC-means. Geomatics and Information Science of Wuhan University,35(11): 1288-1291.[in Chinese])
汪少华,张茂震,赵平安, 等.2011. 基于TM影像、森林资源清查数据和人工神经网络的森林碳空间分布模拟.生态学报, 31(4): 998-1008.
(Wang S H, Zhang M Z, Zhao P A,etal. 2011. Modelling the spatial distribution of forest carbon stocks with artificial neural network based on TM images and forest inventory data. Acta Ecologica Sinica, 31(4): 998-1008.[in Chinese])
严恩萍,林 辉,莫登奎,等. 2010. 基于ALOS数据的遥感植被分类研究. 中南林业科技大学学报, 30(11): 37-42.
(Yan E P, Lin H, Mo D K,etal. 2010. Vegetation classification based on ALOS data. Journal of Central South University of Forestry & Technology, 30(11): 37-42. [in Chinese])
袁金国. 1999. 森林植被遥感分类研究. 河北师范大学报:自然科学版,23(2): 274-277.
(Yuan J G. 1999. Study of forest vegetation classification with remote sensing. Journal of Hebei Normal University:Natural Science, 23(2): 274-277.[in Chinese])
Bone C, Dragicevic S, Roberts A.2006.A fuzzy-constrained cellular automata model of forest insect infestations. Ecological Modelling. Ecological Modelling,192(1/2): 107-125.
Brenner J C, Christman Z, Rogan J.2012. Segmentation of Landsat thematic mapper imagery improves buffelgass (Pennisetumciliare) pasture mapping in the Sonoran Desert of Mexcio. Applied Geography, 34: 569-575.
Clarke K C, Hoppen S. 1997. A self-modifying cellular automaton model of historical urbanization in the San Francisco bay area. Environment and Planning B: Planning and Design, 24(2): 247-261.
Chattopadhyay S, Adhikari S, Sengupta S,etal. 2000. Highly regular, modular, and cascadable design of cellular automata- based pattern classifier. IEEE Transactions on Very Large Scale Integration Systems,8(6): 724-735.
Deutsch E S. 1972. Thinning algorithms on computation theoretic aspects of cellular automata. Communication of the ACM, 15(9): 827-837.
Goodenough D G, Dyk A, Niemann K O,etal. 2003. Processing Hyperion and ALI for forest classification. IEEE Transactions on Geoscience and Remote Sensing, 41(6): 1321-1331.
Ganguly N. 2003. Cellular automata evolution : theory and applications in pattern recognition and classification. Bengal: PhD thesis of Bengal Engineering College.
Kocabas V, Dragicevic S. 2006.Assessing cellular automata model behaviour using a sensitivity analysis approach. Computers Environment & Urban Systems,30(6): 921-953.
Mitsova D, Shuster W, Wang X. 2011.A cellular automata model of land cover change to integrate urban growth with open space conservation. Landscape & Urban Planning,99(2): 141-153.
Mathey A H, Krcmar E, Dragicevic S,etal. 2008. An object-oriented cellular automata model for forest planning problems. Ecological Modelling,212(3): 359-371.
Paul R L.2006.Training cellular automata for image processing.IEEE Transactions on Image Processing, 15(7): 2076-2087.
Sun X Y, Du H Q, Han N,etal. 2014. Synergistic use of Landsat TM and SPOT5 imagery for object-based forest classification. Journal of Applied Remote Sensing, 8(1):801-807.
Sternberg S R. 1980. Language and architecture for parallel image processing. Pattern Recognition in Practice, Amsterdam,35.
Verbeke L P C, Vancoillie F M B, De wulf R R. 2004. Reusing back-propagating artificial neural network for land cover classification in tropical savannahs. International Journal of Remote Sensing,25(14): 2747-2771.
Van Wijk M T, Rodriguez-Iturbe I. 2002.Tree-grass competition in space andtime: Insights from a simple cellular automata model based onecohydrological dynamics. Water Resources Research,38(9): 18-1-18-15.
Wolfram S. 1983. Statistical mechanics of cellular automata. Reviews of Modern Physics,55(3): 5686-5697.
Weller A F, Harris A J, Ware J A. 2006. Artificial neural networks as potential classification tools for dinoflagellate cyst images: a case using the self-organizing map clustering algorithm. Review of Palaeobotany and Palynology,141(3/4): 287-302.
(责任编辑 石红青)
Comparison of Landsat-TM Image Forest Type Classification Based on Cellular Automata and BP Neural Network Algorithm
Tian Jing Xing Yanqiu Yao Songtao Zeng Xujing Jiao Yitao
(ResearchCenterofForestOperationsandEnvironment,NortheastForestryUniversityHarbin150040)
【Objective】 The results of forest resources monitoring with remote sensing are often affected by the method of forest type classification, so this study proposed a forest type classification method based on cellular automata (CA), and the proposed method was tested with a Landsat-TM imagery, aiming at improve the classification accuracy, obtained results can be provide a technique support for remote sensing monitoring of forest resource. 【Method】The study area was located in Dailing Forestry Management Bureau of Lesser Khingan Range, based on a good quality Landsat5-TM imagery covering the study area acquired in 2010 and forest inventory data of the study area in 2012, by using window method to obtain the 5thband mean pixel value of all classes as center cluster, and the Moore model as the framework, the cell as the basic unit, the pixel mean value as the object, and the minimum distance method to obtain evolutionary rules, the judging criteria is that the distance between 8 cell which around the center cell and the each center cluster is the nearest as well as the number of pixels is largest which the center cell belongs to the this category. By compared to BP neural network classificationto illustrate the classification accuracy of the cellular automata. 【Result】 The forest type classification based on cellular automata resulted in an overall accuracy and Kappa coefficient of respectively 88.712 1% and 0.829 1, especially user accuracy of needle forest, broad-leaved forest and mixed forest respectively 73.60%, 92.94% and 94.13%, this results show that forest type identification is obtained the ideal result. BP neural network classification method achieved the overall accuracy of 86.671 3%, Kappa coefficient of 0.798 4.So the two classification methods can effectively identify the forest type information.【Conclusion】 The cellular automata model used in remote sensing image forest type classification can make up the problem of the low classification accuracy caused by the low spatial resolution of TM imagery, it alsocan effectively improve the classification accuracy. And the cellular automata classification method can contribute to monitor the forest resource change and also provide an effective way to improve the efficiency of forest resources monitoring in large-scale areas.
cellular automata; BP neural network; forest type classification; pixel value; landsat5-TM imagery
10.11707/j.1001-7488.20170204
2016-04-15;
2016-11-06。
林业公益性行业科研专项(201504319)。
S771.8
A
1001-7488(2017)02-0026-09
*邢艳秋为通讯作者。
