电驱式小区玉米膜上直插穴播机的研制与试验
2017-03-27石林榕赵武云李荣斌辛兵帮
石林榕,赵武云,孙 伟,李荣斌,辛兵帮,戴 飞
电驱式小区玉米膜上直插穴播机的研制与试验
石林榕1,赵武云1※,孙 伟1,李荣斌2,辛兵帮2,戴 飞1
(1. 甘肃农业大学工学院,兰州 730070; 2. 酒泉铸陇农机有限责任公司,酒泉 735000)
为解决西北地区制种玉米机械化播种问题,针对制种玉米播种条件和农艺要求,设计了电驱式小区玉米膜上直插穴播机。重点对构成该机的核心部件前进速度补偿机构、限深机构、后轮高度调节机构等进行了设计、仿真。前进速度补偿机构是由转动导杆机构驱动平行四杆机构进行机具前进速度补偿来实现成穴器入土播种和出土期间水平位移差接近零;限深机构可保证穴播机播深合格率;后轮高度调节机构可根据平铺膜和垄作铺膜前轮与后轮的行走情况使机器保持水平,非作业时升高后轮可避免鸭嘴接触地表或撕裂地膜。并进行了大田试验,试验结果表明:前进速度补偿机构运行平稳可靠、振动较小,驱动的排种器鸭嘴插膜口小,穴孔和膜孔无错位,播深合格率较高;整机空穴率为1.1%,穴粒数合格率为93.2%,膜下播种深度合格率为90.1%,三项核心指标均达到了NY/T987—2006《铺膜穴播机作业质量》标准的指标;膜孔合格率为98.5%,可满足制种玉米播种的农艺技术要求和玉米播种机的基本作业质量标准要求。
农业机械;农作物;设计;玉米;直插穴播机;电驱
0 引 言
种业是国家战略性、基础性核心产业,是促进农业长期稳定发展、保障国家粮食安全的根本[1]。国家出台系列政策、措施积极构建现代农作物种业体系[2]。种业机械化是种业现代化的前提[3]。田间试验机械化是提高作物育种和种子扩繁效益与效果的必由之路[4]。2014年中国农作物耕种收综合机械化水平突破60%,但中国种业机械化整体水平远低于大田生产[5]。田间试验机械化已成为品种试验的瓶颈[6-7]。中国种业试验机械相关研究起步晚[8]。由于种植农艺要求复杂、技术难度较大等原因,相关研究多数停留在科研阶段,无法满足田间试验需要[9]。中国自1978年以来,通过引进吸收外国技术先后研制了多款播种机[10-12],由于其作业性能、地区适用性等原因,推广较难;近年来,青岛农业大学应用智能电控等技术,研制成功了小区株行谷物播种机、小区精密玉米穴播机等机型[13-14],地区应用性差异等不易使用。
2013年甘肃省成为中国最大玉米制种基地,河西地区为甘肃最具优势的玉米制种基地[15]。河西制种玉米父本母本播种机械不同,母本广泛采用推滚式玉米穴播器,效率较高;父本主要用提插式播种器,可根据土壤墒情和种子调整限深,也可根据不同种类种子单粒、多粒要求安装不同形状型孔的种轮,具有深浅一致、效率高等特点[16]。甘肃十年九旱,地理环境恶劣,覆膜播种优势明显[17]。针对“先铺膜后播种”模式绝大部分播种仍采用人工或简易机械。简单播种机械存在撕膜、挑膜和膜孔错位的现象,劳动强度高、播种效率低下,严重制约了玉米全程机械化的发展,在农村劳动力匮乏的今天尤为显著。
基于此,本文在成功研制玉米直插播种机[18-25]的基础上,针对“先覆膜后播种”方式研究设计了电驱式小区玉米膜上直插穴播机,重点对前进速度补偿机构和限深机构进行了计算,并对设计的穴播机进行田间试验研究。
1 整机机构与工作原理
1.1 整机结构
电驱式小区玉米膜上直插穴播机主要由前轮、电机、链轮Ⅰ、机架、链轮Ⅱ、链轮Ⅲ、排种器机构、前进速度补偿机构、电瓶组、把手、直线推杆、后轮转动轴、后轮、后轮连杆、差速器、前轮轴、链轮Ⅳ和链轮Ⅴ等组成,图1为其结构示意图。排种器机构是将玉米籽粒按一定的柱距播入膜下浅土层,其播种动作由水平位移补偿机构实现“零速”穴播。
1.2 工作原理
如图1所示,电驱式小区玉米膜上直插穴播机作业时,电机驱动差速器,使整机以一定速率前进;与此同时,电机驱动电磁离合器转动,接通电磁离合器电源,其动力传递至前进速度补偿机构。前进速度补偿机构具体现实:将匀速转动为非匀速转动带动平行四杆机构做非匀速回转运动,即整机前进时鸭嘴在播种期间能相对于地面基本直下直上。排种器组件通过支撑杆的上下运动拨动种轮板手来驱动种轮转动取排种、拉起鸭嘴扳机开启活动鸭嘴卸种来实现排种,由于排种器组件通过滑块、弹簧阻尼器与穴播杆连接,当遇到坚硬地面或石块时弹簧阻尼器会被压缩,鸭嘴会被保护;漏播时,安装在排种器组件上的漏播报警器会报警,人工补种即可。
1.3 技术参数
电驱式小区玉米膜上直插穴播机主要应用于甘肃省国家玉米制种基地(主要分布在张掖市甘州区、酒泉市肃州区、武威市凉州区等),其通过安装一个或2个排种器来进行单双行播种,穴播机采用并联2节12V32A的超威铅酸电瓶为蜗轮蜗杆减速电机和牙嵌式电磁离合器提供动力,该机主要技术参数如表1所示。
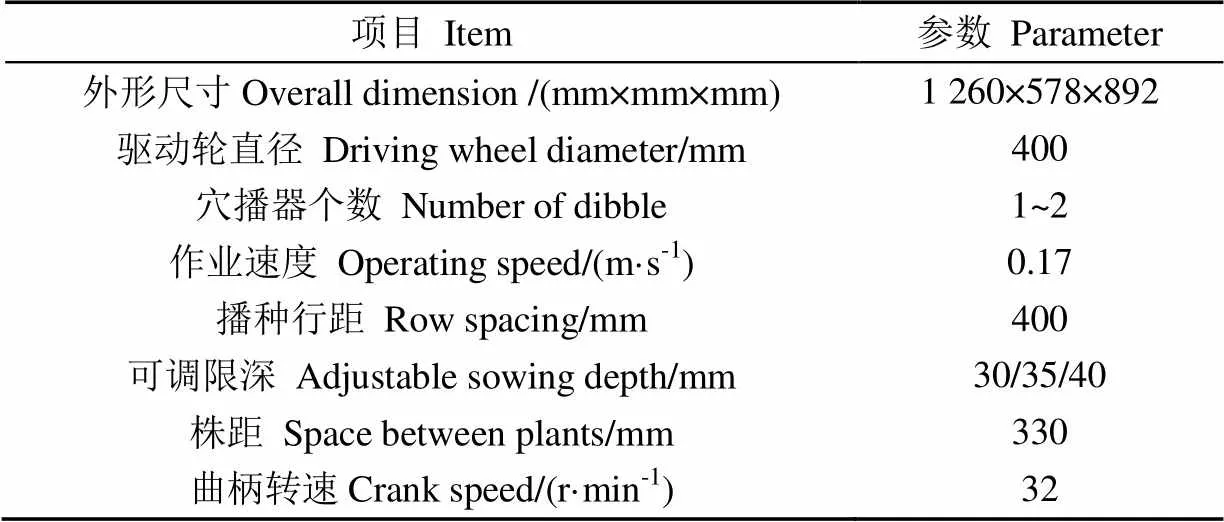
表1 电驱式小区玉米膜上直插穴播机主要技术参数
2 整机关键部件设计
2.1 前进速度补偿机构设计
前进速度补偿机构的主要由曲柄杆、滑块、导杆、主动杆、从动杆和穴播杆等组成,如图2所示。其核心功能为转动导杆驱动平行四杆机构实现前进速度周期性补偿,在前进速度补偿期间穴播杆入土到出土时前进速度接近零,保证了鸭嘴对玉米生长周围种床(上虚下实)破坏少,减少了鸭嘴对地膜撕裂等问题。如图2所示,7个UCP轴承座安装在机架上,曲柄轴与从动曲柄轴安装距离为250 mm,2个从动杆安装距离为248.5 mm,弹簧阻尼器安装长度为126 mm,两套前进速度补偿机构的曲柄杆之间夹角布设为180º。
2.1.1 前进速度补偿机构运动学分析
本文只对前进速度补偿机构中的穴播杆进行运动学分析,目的是分析穴播杆在1个播种周期内的整机前进与穴播方向组成平面内位移和速度变化曲线,能否实现“零速”穴播要求,穴播杆的前进速度能否补偿前进速度产生的位移差。分析穴播期间穴播杆某点加速度,特别是其质心方向加速度变化规律,同时考虑电驱式小区玉米膜上直插穴播机实现走步式播种,2个前进速度补偿机构对称安置,保证了个穴播杆惯性力的平衡[26]。穴播杆从入土、穴底、出土 3个关键时间点前进速度补偿机构的各组成运动简图如图3所示。
1.曲柄 2.导杆 3.主动杆 4.穴播杆 5.从动杆 6.滑块
1.Crank 2.Guide rod 3. Driving rod 4. Rod for hole sowing 5.Driven rod 6.Slider
注:1为曲柄与轴之间的角位移,rad;2为导杆与轴之间的角位移,rad;为主动杆与轴之间的角位移,rad。
Note:1is angular displacement between crank andaxis, rad;2is angular displacement between guide rod andaxis, rad;is angular displacement between driving rod andaxis, rad.
图3 前进速度补偿机构运动简图
Fig.3 Motion diagram of forward speed compensation mechanism
由于整机两边设置的前进速度补偿机构相对曲柄轴对称,且运动方向与前进方向平行,可将前进速度补偿机构转化为对称平面上的平面连杆机构[27],前进速度补偿机构简图如图3所示。
以曲柄杆回转中心为原点,水平方向为轴、垂直方向为轴建立直角坐标系,作封闭矢量多边形,建立矢量方程如下。
矢量方程转化为位移方程为
(3)
式中x,y为构件上某点(铰链点或任意点、、…)的坐标;l为构件(1,2,3,…)的长度,mm;l为构件上点(铰链点或任一点)与间的距离,mm;α为构件铰链点连线在平面内与轴的角度(逆时针方向为正),(°)。
对式(1)~式(3)求导分别得到点、点的线速度和杆2的角速度。
(8)
2.1.2 前进速度补偿机构参数优化
1)参数的确定
在穴播杆入土前,种子已落入鸭嘴。为避免鸭嘴堵土,穴播杆从穴底向上运动时鸭嘴才能开启排种。在排种期间为避免种子在鸭嘴内多次弹击,造成种子在其内逗留时间过长影响排种,穴播杆向上的最大加速度应小于重力加速度。同时应增加在一个播种周期内穴播杆播种时间。如图4所示,为使鸭嘴开启时种子始终对鸭嘴内壁有压力,需满足->0,即<。
1.固定鸭嘴 2.活动鸭嘴 3.玉米籽粒
1.Fixed duckbill 2. Active duckbill 3.Corn grain
注:1为活动鸭嘴对玉米的支撑力,N;2为固定鸭嘴对玉米的支撑力,N;为1和2的合力,N;为玉米重力,N。
Note:1is support force of corn grain on active duckbill, N;2is support force of corn grain on fixed duckbill, N;is resultant force of1and2, N;is corn gravity, N.
图4 鸭嘴向下开穴时玉米籽粒受力分析
Fig.4 Force analysis of corn grain in downward duckbill
据式(9)借助Matlab模拟穴播杆在曲柄杆转速分别为π、1.17π和1.33π rad/s条件下方向加速度变化曲线,对比图4最终将曲柄杆转速定为1.07π rad/s,如图5所示。
其余影响前进速度补偿机构补偿性能参数有点与之间距离、曲柄长度、主动杆长度、导杆与主动杆夹角、整机前进速度。按杆件实际安装长度要求:曲柄杆长度:88.5 mm<1<98.5 mm;点与之间距离:56.5 mm<<66.5 mm;主动杆长度:93 mm<3<98 mm,导杆与主动杆夹角:80°<<100°;整机前进速度:100 mm/s<<300 mm/s。参数如式(10)。
式中为点与之间距离,mm;为导杆与主动杆夹角,(°);为整机前进速度,mm/s。
图5 不同曲柄角速度条件下穴播杆垂直加速度变化曲线
Fig.5 Changing curves of vertical acceleration of rod for hole sowing at different crank angular speeds
2)约束条件及目标函数的建立
转动导杆机构存在条件:<1;鸭嘴入土深度条件:3(1−cos2)−≥0,初始值取40 mm;为实现鸭嘴的近直插穴播[28-29],入土1和出土3期间鸭嘴的前进速度需满足以下条件:
3)优化结果
方程(11)属于非线性约束优化问题,采用MATLAB 优化工具箱的中函数Fmincon进行约束的非线性多元函数最小化优化问题,为便于加工将优化结果四舍五入。曲柄杆长度1为93.5 mm;点与之间距离为61.5 mm;主动杆长度3为93 mm;导杆与主动杆夹角为90°;整机前进速度为170 mm/s。
4)各参数对穴播杆穴播轨迹的影响规律分析
应用Matlab软件可方便观察前进速度补偿机构各参数对前进速度补偿机构穴播杆穴播轨迹的影响规律,如图6所示。
如图6a所示,当点与之间距离为61.5 mm、主动杆长度3为93 mm、导杆与主动杆夹角为90°、整机前进速度为170 mm/s、曲柄杆角速度为1.07π rad/s时,增大1,穴播杆穴播轨迹的高度不变,宽度小幅度变窄,并两边对称于平行于轴的对称线,且穴播杆入土和出土的水平绝对位移差较大,限深变深;1减小,轨迹的高度不变,宽度小幅度变宽,并两边对称于平行于轴的对称线,且穴播杆入土和出土的水平绝对位移差较小,限深变浅。当曲柄杆长度1为93.5 mm、主动杆长度3为93 mm、导杆与主动杆夹角为90°、整机前进速度为170 mm/s、曲柄杆角速度为1.07π rad/s时,增大,轨迹的高度不变,宽度小幅度变窄,并两边对称于平行于轴的对称线,且穴播杆入土和出土的水平绝对位移差较大,限深变深;减小,轨迹的高度不变,宽度小幅度变宽,并两边对称,且穴播杆入土和出土的水平绝对位移差较小,限深变浅,如图6b所示。当曲柄杆长度1为93.5 mm、点与之间距离为61.5 mm、导杆与主动杆夹角为90°、整机前进速度为170 mm/s、曲柄杆角速度为1.07 πrad/s时,增大3,轨迹的高度变高,宽度变宽,对称线左移,且穴播杆入土和出土的水平绝对位移差较大,限深变深,减小3,轨迹的高度变低,宽度变窄,对称线右移,且穴播杆入土和出土的水平绝对位移差较小,限深变浅,如图6c。如图 6d所示,当曲柄杆长度1为93.5 mm、点与之间距离为61.5 mm、主动杆长度3为93 mm、整机前进速度为170 mm/s、曲柄杆角速度为1.07 πrad/s时,当增大或减小时,轨迹的高度和宽度均未变,且穴播杆入土和出土的水平绝对位移差和限深均未变,但无平行于轴的对称线。
2.2 限深机构设计
由于穴播机前轮轮距较小,受地面不平度影响较大,进而使排种器播种性能和播深合格率受到影响较大。播深深一致使苗齐苗壮。为此设计了限深机构,如图7所示。
拉簧2主要作用是克服鸭嘴开口力、排种轮周期转动力及接触零部件摩擦力后将竖直方向错位的顶杆和穴播杆拉回原位,但拉簧变形最大工作行程后的最大拉力较穴播杆的入土阻力小很多。
式中max为拉簧受最大载荷时的长度,mm;0为拉簧未受载时的长度,mm;为弹簧刚度,N/mm;max为拉簧最大变形,mm;max为拉簧最大变形力,N。
播种深度一般为30~40 mm,取穴播深度为35 mm,始终使限深机构低于理论高度(-)20 mm,保证鸭嘴入土后始终位于深,即当顶板小范围接触低于田面时,拉簧仅发生变形完成播种;当顶板小范围接触高于田面时,拉簧被拉伸到长后,限位块限制了顶杆和穴播杆之间的相对运动,顶杆和穴播杆同时向上运动,与此同时压簧被压缩,而鸭嘴入土深度未改变。
1.顶杆 2.拉簧 3.滑槽 4.连接杆Ⅰ 5.穴播杆 6.压簧 7.滑杆 8.滑道 9.直杆 10.卡块 11.滑块 12.连接杆Ⅱ 13.顶板 14.限位块 15.鸭嘴
1.Push rod 2.Tension spring 3.Chute 4.Connecting rod I 5.Planting bar 6.Pressure spring 7.Slide bar 8.Slideway 9.Straight bar 10.Block 11.Slider 12.Connecting rod II 13.Roof 14.Limited block 15.Duckbill
注:Δ限深机构实际与理论安装高度差,mm;为鸭嘴入土深度,mm;为拉簧下端与限位块的距离,mm;1为穴播杆垂直速度,mm·s-1。
Note: Δis installation height difference of limited depth mechanism between theory and practice, mm;is duckbill buried depth, mm;is distance between lower end of tension spring and limited block, mm;1is vertical seed of planting bar, mm·s-1.
图7 限深机构示意图
Fig.7 Sketch map of limited depth mechanism
2.3 后轮高度调节机构设计
为适应平铺膜和垄作铺膜,穴播机前轮与后轮的行走需保持机器水平,并为非作业时升高后轮避免鸭嘴撕裂地膜或接触地表,设计了电驱玉米穴播机后轮高度调节机构,主要由顶杆、直流直线电动推杆、转动轴、底杆和地轮等组成。当直流直线电动推杆正向接上电源后,直流直线电动推杆变长,地轮下降,顶起整机向上升起,当直流直线电动推杆反向接上电源后,直流直线电动推杆变短,地轮上升,使整机下降,如图8所示。
3 田间试验与分析
3.1 试验材料与方法
电驱式小区玉米膜上直插穴播机田间播种性能试验于2015年4月19日在酒泉铸陇农机有限责任公司试验田进行,前进速度为0.17 m/s。试验地地势平坦,南北走向、呈矩形,土壤为沙壤土,含水率为9.5%~15.4%,40 mm深度土壤坚实度平均值为124 kg/cm2,地温平均值为14.5 ℃。试验地依照制种玉米播种技术要求起垄(垄宽70 cm、垄高12~15 cm),覆膜厚度为0.01 mm。玉米种植品种为陇单339号,千粒质量为371 g,种子外形尺寸平均值为87 mm×75 mm×45 mm。按照NY/T987-2006《铺膜穴播机作业质量》标准对播种机作业性能测定要求,计算电驱式小区玉米膜上直插穴播机膜上播种作业时种子空穴率、穴粒数合格率、膜下播种深度合格率[30]。以500 mm长单膜为1个作业小区,测定点为小区内所有的穴孔,用长100 cm板尺测量孔穴深度和种子深度,记录穴孔内的种数。穴播对膜的开孔大小测量依据NY/T 987-2006《铺膜穴播机作业质量》标准进行。试验样机和穴播膜孔大小如图9所示。
3.2 结果分析
电驱式小区玉米膜上直插穴播机播种性能指标与NY/T 987-2006《铺膜穴播机作业质量》标准对比结果如表2所示,其中测量结果为10个作业小区的测定平均值。表3为田间穴深和种深试验结果。表3中实际平均穴深为10个小区不同播深要求的电驱式小区玉米膜上直插穴播机鸭嘴实际穴深的平均值,mm;实际平均播深为10个小区不同播深要求的种子上平面离膜面的距离平均值,mm。
式中为总膜孔个数,个;h为空穴个数,个;k为空穴率,%;h为穴粒数合格穴数,个;l为穴粒数合格率,%;h为膜下播种深度合格穴数,个;b为膜下播种深度合格率,%;为大于标准膜孔1/4的概率,%;为作业小区内大于标准膜孔1/4的膜孔个数;为作业小区内测定总膜孔。
由表2试验结果可知,电驱式小区玉米膜上直插穴播机的空穴率为1.1%、穴粒数合格率为93.2%、膜下播种深度合格率为90.1%试验指标均符合相应指标要求;膜孔合格率为98.5%,可满足制种玉米播种的农艺技术要求和玉米播种机的基本作业质量标准要求。由表3试验结果发现在设计播深分别为30、35和40 mm时,播深合格率分别93%、90.6%和86.7%,随播深增加,播深合格率呈下降趋势,均满足指标要求。试验过程中电驱式小区玉米膜上直插穴播机传动运行平稳,穴播时前进速度补偿机构能可靠补偿机器前进速度。膜孔较小,鸭嘴播种期间无挑膜、撕膜等问题,无穴孔错位现象,满足制种玉米播种的农艺技术要求;鸭嘴遇到石块后排种器未强行插入,试验效果满足设计和农艺要求。
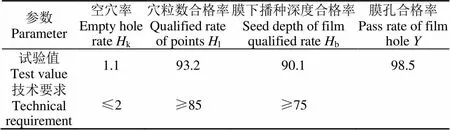
表2 田间播种性能试验结果
4 结 论
1)研制了电驱式小区玉米膜上直插穴播机,设计的前进速度补偿机构能实现成穴器入土播种和出土期间水平位移差接近零,两套前进速度补偿机构的曲柄杆之间夹角布设为180°,减小了整机振动;限深机构可保证两行穴播机构限深一致;后轮高度调节机构根据不同模式铺膜情况使整机保持水平。
2)田间试验结果表明电驱式小区玉米膜上直插穴播机空穴率为1.1%,穴粒数合格率为93.2%,膜下播种深度合格率为90.1%,3项核心指标均达到了NY/T987-2006《铺膜穴播机作业质量标准》的指标,膜孔合格率为98.5%,可满足制种玉米播种的农艺技术要求和玉米播种机的基本作业质量标准要求。
[1] 王磊,刘丽军,宋敏. 基于种业市场份额的中国种业国际竞争力分析[J]. 中国农业科学,2014,47(4):796-805.
[2] 张延秋. 对当前种业改革发展几个问题的认识[J]. 中国种业,2014(10):1-3.
[3] 朱明,陈海军,李永磊. 中国种业机械化现状调研与发展分析[J]. 农业工程学报,2015,31(14):1-7.
Zhu Ming, Chen Haijun, Li Yonglei. Investigation and development analysis of seed industry mechanization in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(14): 1-7. (in Chinese with English abstract)
[4] 尚书旗,杨然兵,殷元元,等. 国际田间试验机械的发展现状及展望[J]. 农业工程学报,2010,26(13):5-8.
Shang Shuqi, Yang Ranbing, Yin Yuanyuan, et al. Currentsituation and development trend of mechanization of field experiments[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(13): 5-8. (in Chinese with English abstract)
[5] 农业部农业机械化管理司. 中国农业机械化科技发展报告(2009-2010)[M]. 北京:中国农业科学技术出版社,2011.
[6] 王长春. 田间育种试验机械化的发展[J]. 世界农业,2001(4):43-44.
[7] 党政平,党琳,张建军. 田间试验机械的应用现状及发展前景[J]. 陕西农业科学,2013,59(6):140-142.
[8] 常建国,刘兴博,叶彤,等. 农业小区田间育种试验机械的现状及发展[J]. 农机化研究,2011,33(2):238-241.
Chang Jianguo, Liu Xingbo, Ye Tong, et al. Agricultural plot field trial breeding status and development of machinery[J]. Journal of Agricultural Mechanization Research, 2011, 33(2): 238-241. (in Chinese with English abstract)
[9] 卢秉福,胡志超,张祖立. 作物育种试验区机械化的研究进展[J]. 中国农机化学报,2006(6):44-47.
Lu Bingfu, Hu Zhichao, Zhang Zuli. Review on mechanization of crop breeding test plot[J]. Journal of Chinese Agricultural Mechanization, 2006(6): 44-47. (in Chinese with English abstract)
[10] 廖庆喜,黄海东,吴福通. 我国玉米精密播种机械化现状与发展趋势[J]. 农业装备技术,2006,32(1):4-7.
Liao Qingxi, Huang Haidong, Wu Futong. The situation and prospect of corn precision metering mechanization in China[J]. Agricultural Equipment & Technology, 2006, 32(1): 4-7. (in Chinese with English abstract)
[11] 陶鑫,徐祝欣,李建东,等. 小麦田间育种机械化研究现状及应用[J]. 农业工程,2013,3(4):12-15.
Tao Xin, Xu Zhuxin, Li Jiandong, et al. Research situation and application of wheat breeding field experiments mechanization[J]. Agricultural Engineering, 2013, 3(4): 12-15. (in Chinese with English abstract)
[12] 杨薇,王飞,赫志飞,等. 小区育种机械发展现状及展望[J]. 农业工程,2014,4(6):7-9.
Yang Wei, Wang Fei, He Zhifei, et al. Development present situation and prospect of plot breeding machinery[J]. Agricultural Engineering, 2014,4(6): 7-9. (in Chinese with English abstract)
[13] 刘曙光,尚书旗,杨然兵,等. 小区播种机存种机构参数试验及优化[J]. 农业工程学报,2010,26(9):101-108.
Liu Shuguang, Shang Shuqi, Yang Ranbing, et al. Test and optimization of parameters for the storing device of plot seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(9): 101-108. (in Chinese with English abstract)
[14] 刘曙光,尚书旗,杨然兵,等. 油菜育种播种机自动供种系统设计[J]. 农业机械学报,2011,42(7):91-95.
Liu Shuguang, Shang Shuqi, Yang Ranbing, et al. Design of automatic supplying seed system for plot seeder of rape[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the Chinese Society for Agricultural Machinery), 2011, 42(7): 91-95. (in Chinese with English abstract)
[15] 李彦伟,盛国成,刘国春. 玉米种子生产机械的研制及推广应用[J]. 粮食加工,2015,5(40):57-59.
[16] 李长荣,马继光,刘立晶. 河西走廊杂交玉米制种机械化
现状及发展趋势分析[J]. 新疆农机化,2012,5:6-9.
[17] 钟建龙. 覆膜和灌溉方式对制种玉米生长发育及产量影响的研究:河西走廊为例[D]. 北京:中国农业科学院,2014.
Zhong Jianlong. Study on the Effects of Plastic Film Mulching and Irrigation Mode on Maize For Seed in Hexi Corridor[D]. Beijing: Chinese Academy of Agricultural Sciences, 2014.
[18] 魏宏安,邵世禄. 垂直插入式小麦覆膜穴播机的研究[J]. 农业机械学报,2001,32(6):34-37.
Wei Hongan,Shao Shilu. Study on wheat hill-drop planter used for perpendicularly inserting film mulching field[J]. Transactions of the Chinese Society for Agricultural Machinery, 2001, 32(6): 34-37. (in Chinese with English abstract)
[19] 赵武云,吴建民,王芬娥,等. 旱地玉米全膜覆盖双垄沟播精密播种机:200910022858.7[P]. 2011-07-20.
[20] 赵武云,马海军,吴建民,等. 全膜覆盖双垄沟播玉米精量穴直播机:201020692945.1[P]. 2012-01-04.
[21] 石林榕,吴建民,赵武云,等. 一种直插式成穴机构:201420489531.7[P]. 2014-12-10.
[22] 石林榕,吴建民,赵武云,等. 一种直插式成穴装置:201420488968.9[P]. 2012-12-10.
[23] 赵建托,赵武云,任颜华,等. 玉米全膜覆盖双垄沟播机直插式播种机构设计与仿真[J]. 农业机械学报,2010,41(10):40-43.
Zhao Jiantuo, Zhao Wuyun, Ren Yanhua,et al. Design and simulation of direct insert corn planting device of furrow seeder with whole plastic-film mulching on double ridges[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(10): 40-43. (in Chinese with English abstract)
[24] 赵武云,戴飞,石林榕,等. 玉米全膜双垄沟直插式精量穴播机设计与试验[J]. 农业机械学报,2013,44(11):91-97.
Zhao Wuyun, Dai Fei, Shi Linrong, et al. Design and experiment of direct insert precision hill-seeder with corn whole plastic-film mulching on double ridges[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(11): 91-97. (in Chinese with English abstract)
[25] 孙伟,吴建民. 鸭嘴式成穴器的选型与研究[J]. 甘肃农业大学学报,2009,44(5):140-142.
Sun Wei, Wu Jianmin. Shape select and study on the duck-rostra type punching-opener[J]. Journal of Gansu Agricultural University, 2009, 44(5): 140-142. (in Chinese with English abstract)
[26] 赵匀. 农业机械分析与综合[M]. 北京:机械工业出版社,2009:113-134.
[27] 李滨城. 机械原理MATLAB辅助分析[M]. 化学工业出版社,2011:35-68.
[28] 耿端阳. 新编农业机械学[M]. 北京:国防工业出版社,2011:127-156.
[29] 孙靖民,梁迎春. 机械优化设计[M]. 北京:机械工业出版社,2006:25-39.
[30] NY/T 987-2006铺膜穴播机作业质量[S]. 北京:中国标准出版社,2006.
Development and experiment of electric driving insert hill-drop planter on film for plot corn
Shi Linrong1, Zhao Wuyun1※, Sun Wei1, Li Rongbin2, Xin Bingbang2, Dai Fei1
(1.,730070,; 2.,735000,)
In solving the problem on the seed corn mechanization sowing in the northwest area and understanding the corn sowing conditions and agronomic requirements, an electric driving insert hill-drop planter on film for plot corn was developed. The differential motor drives are installed in the front wheel shaft with the front wheel moving ahead. Also, the motor drives are used for the electromagnetic clutch to rotate. Whenever the clutch is switched on, the input power of the motor crank shaft sprocket is used through a different number of the teeth of the deceleration after the transfer to increase the speed compensation mechanism. The uniform rotation of the input crank guide rod achieves a non-uniform rotation that drives the non-uniform rotary motion of the parallel four-bar mechanism, which means that when the planter moves forward, the duckbill in the sowing period goes straight up and down relative to the ground. The sowing device assembly makes the toggle wheel move by the up and down movement of the brace, driving the wheel wrench to turn to take or discharge seeds, and to pull the trigger on the active duckbill to achieve the seed discharging. The sowing device components are attached to the sowing rod through the slider and spring damper. When the hard ground or rock spring damper is compressed, it protects the duckbill. When there is a leakage sowing, the sowing alarm installed on metering device will alarm the module to remind the artificial sowing. As part of the core components of the forward speed compensation mechanism, the depth limiting and rear-wheel height adjusting mechanisms were designed and simulated. The forward speed compensation mechanism consists mainly of crank rod, slider, guide rod, driving rod, driven rod, and bunch rod. The core function of attaining the forward speed compensation under the periodically rotating guide bar drives the parallel four-bar mechanism. Compensation under the buried and unearthed planting bars, which is near zero speed, promotes the corn growth around the bed (deficient in the upper bed and excess in the lower bed), makes the corn less damaged, and reduces the planting bar to tear the plastic film. Considering the tread of the front wheel of the planters is small, the seed sowing performance and the pass rate of sowing depth for the seed sowing device are affected by the ground roughness. Also, the corn seeds germinate better under the same sowing depth. With this, the depth limiting mechanism was designed. In meeting the demand of the film mulching and ridge tillage, the walking machine maintains the level, and when there is no operation the duckbill of the planter avoids touching the surface and tearing film, and the rear height adjusting mechanism designed is mainly composed of push rod, DC (direct current) linear electric push rod, rotating shaft, bottom bar and land wheel. In the perform test, the results showed that the hole rate was 1.1%, the qualified rate of seeds number per cavity was 93.2%, and the pass rate of sowing depth under the film was 90.1%. The three sowing core indicators have reached the standard of NY/T 987-2006 PU film dibbling machine operation quality, and the film hole qualified rate was 98.5%. The test results show the operation of compensation device is stable and reliable in the forward speed, which was placed on the 2 lines of symmetry and greatly reduced the vibration of the whole machine cycle. The film holes of the duckbill inserted were smaller, and hole and film hole have not slipped, and the qualified rate of sowing depth was higher. After encountering stones, the duckbill will not insert into it forcedly. The results of this study met the design and agronomic requirements as cited.
agricultural machinery; crops; design; corn; insert hill-drop planter; electric drive
10.11975/j.issn.1002-6819.2017.04.005
S223.2
A
1002-6819(2017)-04-0032-07
2016-06-19
2016-12-26
“十二五”国家科技支撑项目(2013BAD08B01-7);甘肃省科技重大专项计划项目(143NKDF016);国家自然科学基金资助项目(51405086)
石林榕,男,助教,甘肃陇南人,主要从事旱区农业工程技术与装备研究。兰州 甘肃农业大学工学院,730070。Email:getmao@qq.com
赵武云,男,教授,博导,甘肃兰州人,主要从事农业工程技术与装备研究。兰州 甘肃农业大学工学院,730070。 Email:zhaowy@gsau.edu.cn
中国农业工程学会高级会员:石林榕(E041200842S)。
石林榕,赵武云,孙 伟,李荣斌,辛兵帮,戴 飞. 电驱式小区玉米膜上直插穴播机的研制与试验[J]. 农业工程学报,2017,33(4):32-38. doi:10.11975/j.issn.1002-6819.2017.04.005 http://www.tcsae.org
Shi Linrong, Zhao Wuyun, Sun Wei, Li Rongbin, Xin Bingbang, Dai Fei. Development and experiment of electric driving insert hill-drop planter on film for plot corn[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(4): 32-38. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.04.005 http://www.tcsae.org
