基于sEMG的特征包络线提取与动作识别研究
2017-03-27鲍官军王志恒
高 峰,杨 彬,鲍官军,王志恒
(浙江工业大学 特种装备制造与先进加工技术教育部省重点实验室,杭州 310014)
基于sEMG的特征包络线提取与动作识别研究
高 峰,杨 彬,鲍官军,王志恒
(浙江工业大学 特种装备制造与先进加工技术教育部省重点实验室,杭州 310014)
针对表面肌电信号模式识别在康复器械以及智能假肢中的应用问题,通过平方调解法来提取多通道sEMG特征包络线,以提高手指动作识别速率与正确率;首先将手指动作采集实验获取的表面肌电信号进行平方处理,再经低通滤波形成包络线;利用幅值乘方法对不同的动作类型的包络线进行处理并形成学习用的教师样本标签,最后通过BP神经网络完成动作的识别分类;实验结果显示,屈拇指、屈食指、屈中指、屈无名指、屈小指和屈五指这6种动作的平均识别正确率为94.93%,每次动作识别的平均延时为50.7 ms。
表面肌电信号;特征包络线;平方调解法;样本标签;BP神经网络
0 引言
表面肌电信号(surface electromyographic signals, sEMG)是不同的运动单位动作电位(motor unit action potential,MUAP)在肌肉纤维和细胞组织中传导叠加的综合结果[1]。sEMG由于具有拾取方便并且无创伤性等特点,现被广泛应用于肢体运动康复医疗领域当中[2-3]。例如,矫形器、机器人康复辅助设备以及肌电假肢等多类人机交互平台[4]。为了能更好的将sEMG应用于康复器械的控制当中,主要的工作就是从表面肌电信号中解码肢体的运动模式,即sEMG的特征提取与动作模式识别[5]。Englehart K.和Hudgins B.等利用小波包提取特征向量并应用MLP分类器,识别错误率在7%以下[6]。Abdulhamit Subasi等通过小波分析对表面肌电信号进行特征提取并利用神经网络技术完成了分类实验,正确识别率达到了90.7%[7]。Momen等使用模糊C-means聚类法对sEMG特征空间进行分割,对4类及5类手势的平均识别准确率分别达到92.7±3.2 %和79.9±16.8 %[8]。以上的研究表明,虽说目前动作模式分类的正确率已经达到较高的水平,但同时也存在着诸多的问题[9]。例如,电极布置不当,缺失了部分的体征信息,个体差异性对实验效果的影响较大[10];频域特征的提取在某种程度上提高了动作识别正确率,但较多特征参数相对时域特征来说耗时严重,影响了控制的实时性[11]。简而言之,对动作类型识别的速率和正确率是实现良好康复训练的必要条件[12]。
Chen Z, Fan S等人提出人手康复训练最基本的成效就是让患者能够实现各个手指的弯曲动作,以此为手部功能进一步的康复奠定生理基础[13]。而神经网络具有较好的容错性、自适应性和复杂特征空间划分能力,在模式识别领域中有着广泛的应用。
综合以上问题与结论,本文利用12路肌电信号采集系统提取人手屈拇指、屈食指、屈中指、屈无名指、屈小指和屈五指这6种动作的9通道肌电活动信息,提出了一种平方调解法提取信号时域特征包络线,根据添加的教师样本动作标签,最后通过BP神经网络完成动作的识别分类。结果表明,神经网络对于提取特征包络线后的手指动作的识别正确率可达94.93%,每次动作识别平均延时为50.7 ms。
1 多通道sEMG信息采集
1.1 信息采集设备
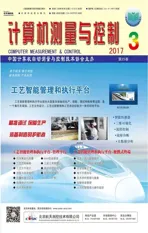
在sEMG信号采集实验中使用的是自主研发定制的肌电信号采集系统,采样频率为500Hz,具有10位AD转换精度,与工作站通过USB接口进行通讯,可以同时采集12路通道的sEMG信号并实时显示在工作站软件界面上。采样电极为3极差分输入,在一定程度上保证了输入信号的完整性和真实性。实验设备具体如图1所示。
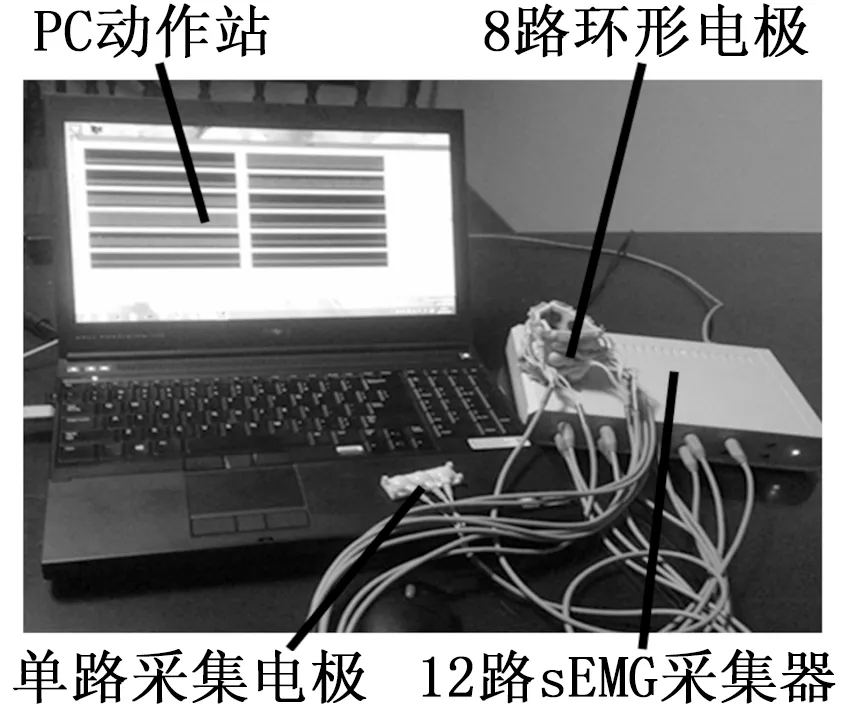
图1 12路sEMG信号采集设备
1.2 电极布置方案
准确地采集表面肌电信号并使其在最大程度上表示不同运动模式下所对应肌肉的活动状态是sEMG信号处理和实际应用的前提[14]。医学研究表明,各个手指弯曲时所牵动的肌肉群主要包括拇长屈(展)肌、指总屈肌(指深屈肌、指浅屈肌)。但由于指深屈肌位于众多肌肉群里层,一定程度上会牵动其它肌肉的运动[15],例如掌长肌和桡侧腕屈肌。具体如表1所示。

表1 各指弯曲动作对应肌肉群
考虑到前臂手指驱动肌肉的分布形式以及肌肉之间不可避免的耦合牵动,共设置9组电极来采集sEMG信号。其中8路电极环绕手臂布置,用以检测食指、中指、无名指、小指对应总指伸屈肌产生的sEMG信号,另外一路电极单独布置,用以检测拇长屈肌产生的sEMG信号。这种布置方式,可以很大程度地保证各路肌电信号的独立性,以利于动作识别。
1.3 采集实验
利用上述方法和设备,采集受试者在屈拇指、屈食指、屈中指、屈无名指、屈小指和屈五指这6种动作,指间关节弯曲角度为90°±5°,在每种动作当中两次动作之间有1-2秒的间隔,共做100-200次,以保证有足够的数据样本供神经网络的训练和学习。实验中,手指弯曲的力度与速度缓慢适中,并在整个采集实验过程当中保持一致,以贴近患者受试的真实情况。图2为屈拇指时其中四个通道的原始肌电信号。
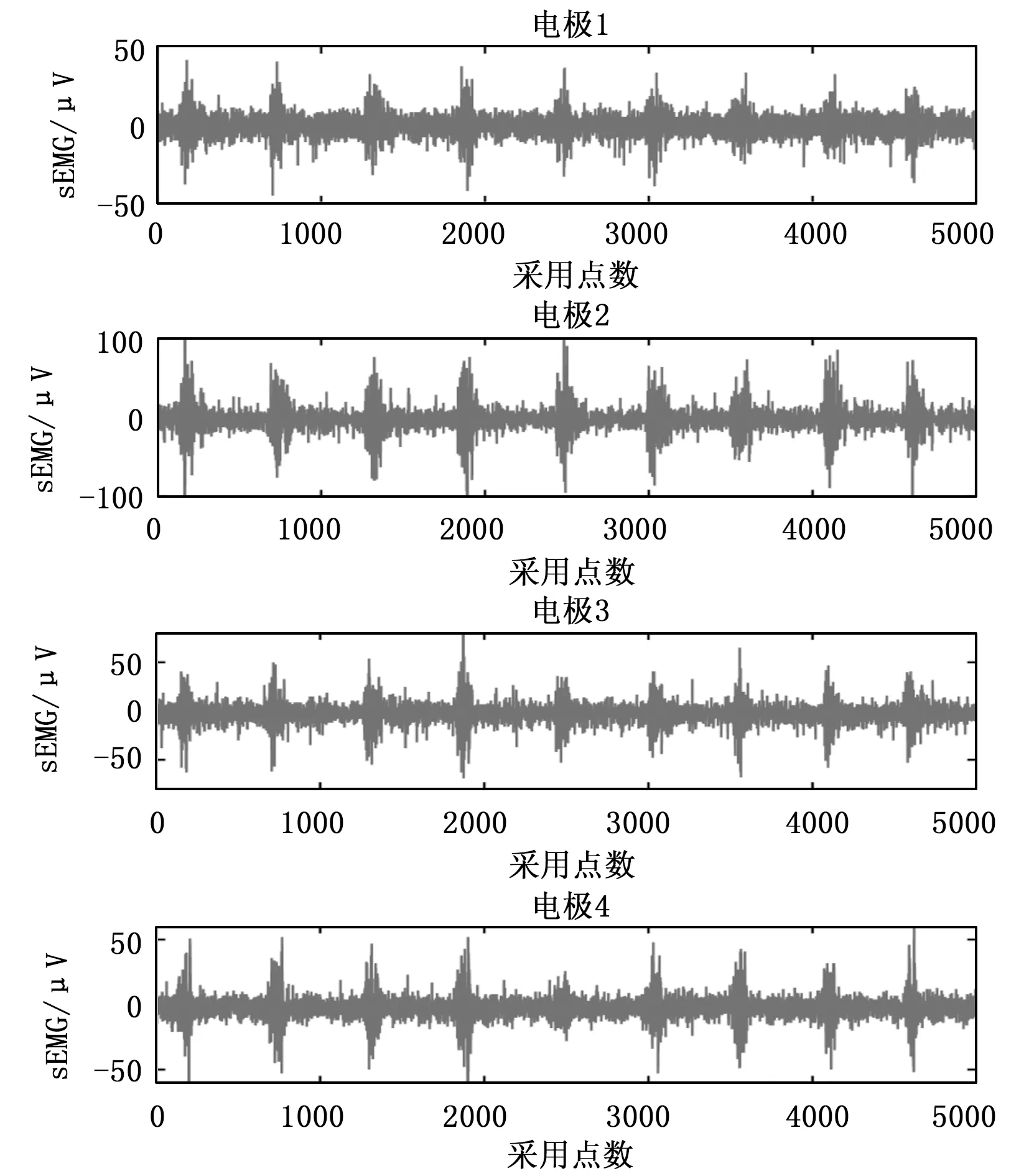
图2 原始肌电信号(屈拇指1-4通道)
2 特征包络线提取与样本标签制定
文[7]中所述,肌电信号的形成,是经过大脑意识调制过的电脉冲作用于肌肉,在神经递质的作用下在肌肉中产生肌电信号并引起肌肉收缩。而肌电信号的特征提取,从本质上讲就是将大脑意识的调制信号提取出来。从肌电信号波形来看,能反映大脑意识的波形就是肌电信号的包络线,而且包络线幅值反映了各路肌电信号的信噪比。如图3所示,将各电极采集到的肌电信号包络线提取后,就可根据这些包络线组成的特征信号识别手指动作。

图3 肌电信号包络线
2.1 提取sEMG特征包络线
本文提出的提取包络线的方法为平方解调法,具体来讲就是将信号进行平方处理后,再经过低通滤波得到包络线。平方调解法具有因果性,可用于实时提取肌电信号特征包络线。
滤波调解过程当中,低通滤波器采用了3阶巴特沃兹滤波器,其包络线输出可表示如下:
(1)
式中,x(n)为原始信号数据,bi和ai是滤波器参数,可以根据阶数和3db截止频率设计。
图4为屈拇指时对应原始肌电信号包络滤波的结果。

图4 肌电信号的包络滤波(屈拇指1-4通道)
2.2 制定教师样本标签
实验中需要识别的手指动作包括:屈拇指、屈食指、屈中指、屈无名指、屈小指以及屈五指,除此之外还隐含了无动作这一状态,所以实际需要识别七种状态,这样才能涵盖所有采集到的特征数据。因此可以采用7位二进制的编码方式来表示各种状态,形成如表2所示的动作标签。
在不同的手指动作中,各电极检测到的sEMG信号虽然强度大小不一,但具有同步性,因此可以将9路sEMG信号的包络信号叠加后取平均,从而构造出一个动作同步信号Y(t):
Y(t)=[y1(t)+y2(t)+y3(t)+y4(t)+y5(t)
+y6(t)+y7(t)+y8(t)+y9(t)]/9
(2)
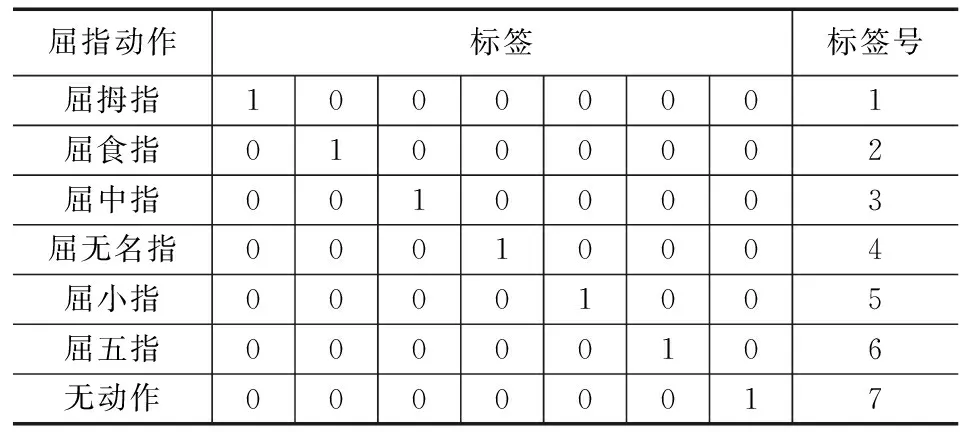
表2 屈指动作标签
利用Y(t)可进一步构造动作标签Sync(t)。具体做法是将Y(t)取n次方后再经过一个幅值乘方门限比较器[16],从而构造出标签数字信号Sync(t)如下:

Y(t)n-b>0
Y(t)n-b≤0
(3)
其中:n、b根据具体情况通过试验确定。本次实验取n=3,b=27 000形成的Sync(t)信号与sEMG的对应关系如图5所示(为清楚起见在图将Sync(t)信号幅值放大50倍),可以看出两者具有良好的同步性。
每采一次数据,则给数据加上相应的动作标签。Sync(t)信号为1的区域表示有屈指动作,应加上七位二进制1000000的标签;没有同步信号的区域表示是无动作状态,应加上0000001的动作标签。这样,每生成一次9×1的肌电包络信号向量,都对应着一个二进制动作标签,从而形成教师样本数据。

图5 添加动作标签的效果(屈拇指1-4通道)
3 实验与结果分析
3.1 BP神经网络的构建、训练与验证
在手指动作识别中,BP神经网络感知器不但具有良好的分类效果,而且速度快,非常适合于类似手指康复、机器人操作等需要很高实时性的场合。
根据上文所述,因为有9路包络信号构成9×1向量输入,同时有7路标签信号输出,因此可以构造9输入、7输出的三层神经网络感知器。其中,隐含层选择30个节点,每个神经单元采用Sigmoid激活函数。对神经网络加以训练后,具体的训练结果和识别效果可以用带有标签的数据加以验证。
详细的结果可以用表3所示的混淆矩阵进行评价。在混淆矩阵中,每一行代表某一类实际输出中包含的所有正确和错误的类输出;每一列代表验证样本中每一类数据的标签输出分类状况。在完全正确分类的情况下,除了主对角线元素外,其他元素都应该为0,但在实际中总是存在错误分类的情况,而错误的严重程度则可以在混淆矩阵中定量显示出来。
例如,第1行代表在总的拇指动作输出中,拇指动作数据中有1349个被正确识别输出,食指动作数据中有39个被错误地识别为拇指动作输出,中指动作数据中有1个被错误地识别为拇指动作输出,其他行含义及错误依次类推。而第1列则表示,在所有的拇指样本动作中,有1349个被正确识别,有7个被错误地识别为食指动作,有1个被错误地识别为中指动作,其他的列含义及错误识别依次类推。

表3 混淆矩阵
3.2 实时动作分类实验与结果分析
按照屈拇指、屈食指、屈中指、屈无名指、屈小指、屈五指的动作顺序进行数据记录并加上标签,每次动作周期维持在1~2 s,每种动作重复多次后转入下一个动作,用训练过的神经网络进行实时识别。本次实验共进行140次屈指动作对应有71980个数据采样点,持续时间大约151 s得到的识别结果如图6所示。

图6 神经网络实时识别结果
根据以上信息,本次实验通过提取sEMG特征包络线并利用BP神经网络进行手指动作的识别分类结果如表4所示。
其中,每次动作识别平均延时
(4)
式中,T为总消耗时间;N为采样点数;f为采集器频率;n为动作次数。

表4 手指动作识别正确率及平均延时
在整个实验过程中影响手指动作识别正确率的因素主要有:
(1)受试者的个体差异性,屈指力度波动范围较大;
(2)手指肌肉之间存在不同程度上的相互牵动,无法做到严格的单指独立弯曲动作。
对比表3与表4可知,预先采集新用户(患者)动作数据并进行训练之后,其对应屈指动作识别的正确率将提高3%左右。
本次实验手指动作识别平均延时为50.7 ms,相对于文[6]中Englehart.K所指出的信号长度处理延时200~300 ms,完全在可接受范围之内。因此,本文提出的方法满足在康复机械控制领域的实时性要求。
4 结论
(1)根据人手前臂肌肉分布特点,设计了9路采集电极的布置方式。其中8路电极环绕手臂布置,用以检测食指、中指、无名指、小指屈肌产生的sEMG信号,另外一路电极单独布置,用以检测拇屈肌产生的sEMG信号。这样可以最大程度地保证各路肌电信号的独立性,以利于动作识别。
(2)基于肌电信号产生的原理,提出了一种平方调解法提取肌电信号的特征包络线,利用幅值乘方门限法将其转变为方波信号并制作教师样本标签。
(3)构造9输入、7输出的BP神经网络并利用样本标签进行训练,最终通过实验验证得到屈拇指、屈食指、屈中指、屈无名指、屈小指和屈五指等6种手指动作平均识别正确率为94.93%,每次动作识别平均延时为50.7 ms。由此可知,本文提出的方法满足在康复机械控制领域的实时性要求。
[1] Khokhar Z O, Xiao Z G, Menon C. Surface EMG pattern recognition for real-time control of a wrist exoskeleton[J]. Biomedical Engineering Online, 2010, 9(5):41.
[2] 吴 琼,丛 芳,桑德春,等. 肌电触发电刺激对偏瘫上肢运动功能恢复的研究进展[J].中国康复理论与实践, 2010, 16(2): 124-126.
[3] 张道辉. 仿生机械手肌电控制方法研究[D].沈阳:沈阳理工大学,2013.
[4] 王利波.康复仿生手研究[D].沈阳:沈阳理工大学,2013.
[5] 王 涛,侯文生,吴小鹰,等.用于肌电假肢手控制的表面肌电双线性模型分析[J].仪器仪表学报, 2014, 35(8): 1907-1913.
[6] Englehart K, Hudgins B. A robust, real-time control scheme for multifunction my electric control [J]. IEEE Transactions on Biomedical Engineering, 2003, 50(7):848-854.
[7] Subasi A, Yilmaz M, Ozcalik HR. Classification of EMG signals using wavelet neural network [J]. Journal of Neuroscience Methods, 2006, 156(1-2):360-367.
[8] Momen K, Krishnan S, Chau T. Electromyographic signals corresponding touser-selected intentional movements formultifunction prosthesis control[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2007, 15(4):535-542.
[9] 吴冬梅, 孙欣, 张志成,等. 表面肌电信号的分析和特征提取[J]. 中国组织工程研究与临床康复, 2010, 14(43):8073-8076.
[10] Tenore F, Ramos A, Fahmy A, et al. Towards the control of individual fingers of a prosthetic hand using surface EMG signals[A]. International Conference of the IEEE Engineering in Medicine & Biology Society[C]. 2007:6146-9.
[11] Kevin T. O’Toole, Mark M. McGrath. Mechanical Design and Theoretical Analysis of Four Fingered Prosthetic Hand Incorporating Embedded SMA Bundle Actuators[J]. Engineering and Technology, 2007,31(2):142-149.
[12] 万 莎. sEMG信号实时检测及假肢手指控制的初步研究[D].重庆:重庆大学, 2012.
[13] Chen Z, Fan S, Zhang D. An Exoskeleton System for Hand Rehabilitation Based on Master-Slave Control[J].Intelligent Robotics and Applications. Springer International Publishing, 2014:242-253.
[14] 黄鹏程.基于多点连续肌电控制的仿生康复手关键技术研究[D].杭州: 浙江工业大学, 2013.
[15] 陈士文, 周 晓, 王文艳,等. 前臂后群伸肌的神经分布及意义[J].中国临床解剖学杂志, 2013, 31(1):22-24.
[16] 黄鹏程,杨庆华,鲍官军,等.基于幅值立方和 BP 神经网络的表面肌电信号特征提取算法[J].中国机械工程,2011,23(11):1332-1336.
Research on Feature Envelope Extraction and Motion Recognition Based on Surface Electromyographic Signals
Gao Feng, Yang Bin, Bao Guanjun, Wang Zhiheng
(Ministerial and Provincial Key Laboratory of E&M,Zhejiang University of Technology,Hangzhou 310014, China)
On study of surface electromyographic signals (sEMG) pattern recognition in rehabilitation equipment and intelligent prosthetic applications, a square-mediation method that extracts the envelope of multi-channel sEMG features is presented, with which the finger gesture recognition rate and accuracy rate is improved. In the process, the sEMG is squared by the finger movement acquisition experiment, and then the envelope was formed through the low-pass filtering. Using the amplitude-multiplication method, the envelope of different types of finger action is used to creat the teacher sample label. With these label, the BP neural network is used to accomplish the recognition and classification of the action. Experimental results show that the average correct rate of finger behavior recognition is 94.93% , including thumb, index finger, middle finger, ring finger, little finger and all finger flexion actions. The average time delay for each action recognition is 50.7 ms.
surface electromyographic signals (sEMG);feature envelope;square-mediation method;sample label;BP neural network
2016-10-21;
2016-11-24。
国家自然科学基金(51405441);浙江省重点科技创新团队项目(2011R50011);浙江省自然科学基金(Q15E050025)。
高 峰(1968-),男,浙江杭州人,博士,副教授。主要从事康复机器人方向的研究。
杨 彬(1991-),男,云南红河人,硕士研究生,主要从事康复机器人方向的研究。
1671-4598(2017)03-0213-04
10.16526/j.cnki.11-4762/tp.2017.03.058
TN911.7;TP241
A