一种永磁同步电机转子初始位置检测方法
2017-03-27樊卫华朱孟韬曹建新
杨 杰,樊卫华,朱孟韬,郑 鑫,曹建新
(1.南京理工大学自动化学院, 南京 210094; 2.江苏通用电梯有限公司, 江苏 扬州 225000)
一种永磁同步电机转子初始位置检测方法
杨 杰1,樊卫华1,朱孟韬1,郑 鑫2,曹建新2
(1.南京理工大学自动化学院, 南京 210094; 2.江苏通用电梯有限公司, 江苏 扬州 225000)
电梯曳引机控制需要实时获取转子的机械角度,而常用的增量式编码器在首次清零信号到来前不能提供准确的转子位置信息,从而可能导致闭环控制失败;因此,转子的初始位置检测成为曳引机控制中必须解决的问题,传统的检测方法计算复杂,且定位过程中易造成转子堵转或摄动,不利于电梯系统的舒适性;为此,提出了一种利用正弦波增量式编码器的换向信号计算转子初始位置的方法,设计并实现了编码器换向信号的调理电路,研究了利用两路换向信号解算转子的初始位置信息的算法,并研发了相应的软件模块;实现了当转子保持静止时初始位置的高精度检测,满足电梯平稳启动的需求;实验结果表明,该方法不依赖电机的数学模型,运算量小,且具有较高的检测精度和通用性。
永磁同步曳引机;初始位置;启动
0 引言
永磁同步电机具有结构简单、调速性能好、效率高的特点,在电梯等特种设备中应用广泛。为降低系统成本,永磁同步电机调速系统通常选用增量式编码器来实时获取转子的位置信息,实现闭环控制。由于在初始时刻,转子的初始位置是任意的,而增量式编码器的脉冲计数总是从零开始递增(或递减),因此在首次清零脉冲到达前,不能向控制器提供精确的转子位置信息[1]。这可能使得矢量控制、直接转矩控制方法失效,在垂直升降式电梯的曳引机控制系统等应用中,将导致严重的事故。由于电梯这样的特种设备不允许随意转动曳引机,定位过程中转子须严格静止,且保持稳定,否则也将引起严重后果,因此转子的初始位置检测是曳引机控制系统中必须解决的问题。
使用绝对式编码器固然可以解决上述问题,但在相同的成本下,提供的测量精度却远低于增量式编码器,不利于提高系统的控制性能。近年来,许多学者对转子的初始位置检测进行了大量研究。文献[2-3]提出了基于磁定位原理的摄动定位方法。通过给电机定子施加电流矢量,利用增量式编码器脉冲信号检测电机的转动方向,根据转动方向与摄动电流矢量的角度关系,不断改变电流矢量的方向,缩小定位范围,直至转子稳定不动。这种方法算法较复杂,定位时间长,且在定位过程中造成转子摄动,不利于提高电梯系统的舒适性。文献[4-7]提出了脉冲电压注入法。通过向定子绕组注入各方向的电压脉冲,同时比较各方向电压脉冲的电流响应的最大值,之后不断调整电压脉冲的相位,使之逼近实际转子位置。可在抱闸闭合状态下进行,但检测效果依赖电流采样精度,且会造成电机在启动前堵转。
针对上述问题,本文利用在电梯曳引机控制系统中广泛应用的增量式正弦波编码器提供的sin/cos正余弦换向信号,提出了一种转子初始角度检测方法。通过设计信号调理电路和软件滤波算法,将两路相位互差90度的换向信号在功能上近似处理为单圈绝对位置编码器,在电机启动时提供转子初始位置信息。
本文内容安排如下:第1章介绍了基于换向信号的定位原理;第2章给出了信号调理电路的设计;第3章详细介绍了定位方法并给出了软件流程;第4章给出了调试结果;最后总结了本文工作。
1 基于sin/cos信号的定位原理
本文以电梯控制领域常用的正弦波增量式编码器海德汉ERN1387为例,该编码器的接口信号包括:A、B、R、C、D,其中A、B为幅值相等,相位相差90度的正弦增量信号,A、B每转输出N个周期的正弦波,N为编码器线数;R为参考点信号,每转输出一个脉冲;C、D信号为换向信号,这两个信号原理与A、B相同,但每转仅输出一个完整的正弦波信号,一般用于矢量控制中磁通位置的检测。
首先,介绍基于C、D换向信号的转子初始角度定位原理[8]。如图1所示,C相和D相在转子单圈行程内,只输出一个完整的正弦波形,其信号幅值只与曳引机的转子机械角度相对应,且C相超前D相90度机械角度。
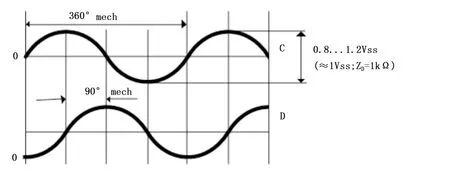
图1 编码器C相和D相的理想输出波形
设t时刻,转子的绝对机械角度为η(t),信号C的电压为VC(t),信号D的电压为VD(t),信号C和信号D的正弦电压信号的幅值为E,则:
(1)
由式(1)可得:
(2)
式(2)表明:原理上可通过同时采样C、D两路电压信号,获取转子的绝对机械角度。
实际上,曳引机矢量控制算法需要获取转子的实时电角度γ(t)。而电角度γ(t)与机械角度η(t)之间的关系如(3)所述:
γ(t)=np*(η(t)-σ)
(3)
其中:np为电机极对数,σ为编码器安装时的误差角。因编码器和电机同轴相连,故误差角σ为常值,且可在调试阶段由转子磁定位法求得。
获得电角度γ(t)后即可进行定子三相电流的坐标变换,驱动转子旋转。
下面介绍如何将上述原理应用于实际系统检测。首先给出信号调理电路。
2 硬件电路设计
由于编码器ERN1387的所有信号均以差分形式输出,而大多数微处理器(MCU)通常不能直接接受差分输入信号。为了从C、D两相的输出信号中解析出转子的位置信息,需要设计专门的信号调理电路。
该信号调理电路首先利用去差分电路将差分信号转化为单端信号。考虑多数MCU内置的ADC模块输入范围为:0~3V,不能接受负电压,故设计偏置电路将正弦信号转化为正值信号;再经由比例电路将信号调整至ADC模块的输入量程内;考虑曳引机控制系统工作环境比较恶劣,常有强电磁干扰,故在电路中设计稳压滤波电路去除高频噪声,改善信号采样的质量。
下面以C相为例,介绍信号调理电路的硬件设计。

图2 去差分电路原理图
图2为去差分电路原理图。C+、C-信号间通过接入一个120Ω电阻进行阻抗匹配,然后信号经过RC低通滤波器,去除高频噪声干扰;经过由运算放大器LM358构成的比例电路将差分信号放大,最后在2.5V偏置电压的作用下变为单端正值信号,送入后续电路进行幅值调整和稳压滤波。

图3 幅值调整和稳压滤波电路原理图
为了提高单端信号的抗干扰能力,将其送入反向电压跟随器,而后再经过反向比例器,通过调节滑动变阻器的阻值,使其输出电压范围为0~3V,满足DSP芯片的ADC模块对输入信号的要求。针对电压采样中可能遇到的信号毛刺以及强电磁干扰导致的电压采样输出的瞬间峰值过高等问题,在信号末端增加3V稳压二极管和一阶RC低通滤波器,以保证信号质量。
3 初始角度检测的软件实现
以在曳引机控制中常用的TI公司浮点型DSP处理器——TMS320F28335为例,介绍初始位置检测算法模块的设计与实现。
本文设计的初始角度检测算法包括AD采样、信号滤波、幅值调整、角度解算和脉冲叠加,具体流程如图4所示。

图4 软件运行流程
由式(2),同时采样某一时刻的C、D信号可解算出此刻的转子位置信息,这要求DSPADC模块中的采样保持器应满足同时采样两路AD信号的要求[9]。
实际工况下,虽然信号调理电路可以滤除部分噪声,但残余噪声仍对系统性能有不小的影响,故在软件中采用均值滤波,对信号进一步进行处理。具体处理方法为:
首先,对C相、D相的输出电压采样10轮,每轮采样3次,求均值后存入数据队列;
然后,去除数据队列中的最值后再次求均值,尽可能减小噪声干扰。
由于调理电路输出的两路电压信号可能存在峰峰值不等的情况,解算角度前必须在调试阶段进行幅值调整,将两路正值信号转化为幅值相等,仅存在相位差的标准正余弦信号。具体做法如下,记录C相、D相信号的峰值和谷值Vcmax,Vcmin,Vdmax,Vdmin,记t时刻C、D相电压采样值为Ec(t)和Ed(t),则经过如式(4)幅值调整后,可解算出机械角度值。
η(t)=
(4)
由式(4)计算得出的转子机械角是基于ADC采样结果的,而在实际工况下,系统常伴随着强电磁干扰。若在编码器首次清零前的行程内,持续采样C、D相电压幅值获取转子机械角度以驱动电机,则在外部因素的限制下难以保证η的解算精度。而连续波动的角度误差势必造成电机输出的电磁转矩产生波动,影响系统的控制效果[10]。特别是针对极对数np较多的电机,在机械角度向电角度的转化中,较大的np值会增益电角度误差,进一步削弱控制效果。
故本文采用只解算一次初始角度值的方法来避免误差的波动,在电机运行前求出转子初始角度值,对应编码器的最大脉冲计数值,将其转化为相应的计数脉冲初值,在首次清零信号到来前叠加至处理器的正交编码模块的脉冲计数中,为系统提供稳定的转子位置信息,以保证电机平稳安全地运行。
4 调试结果
本系统采用电流、转速双闭环的控制策略对曳引机进行控制。在进行转子初始角度检测前,首先应测试调理电路输出的sin/cos信号波形,利用示波器观察其是否已经正值化。图5为C相信号输出。可以看到,信号已经完全正值化,但在噪声干扰下的存在明显的毛刺。
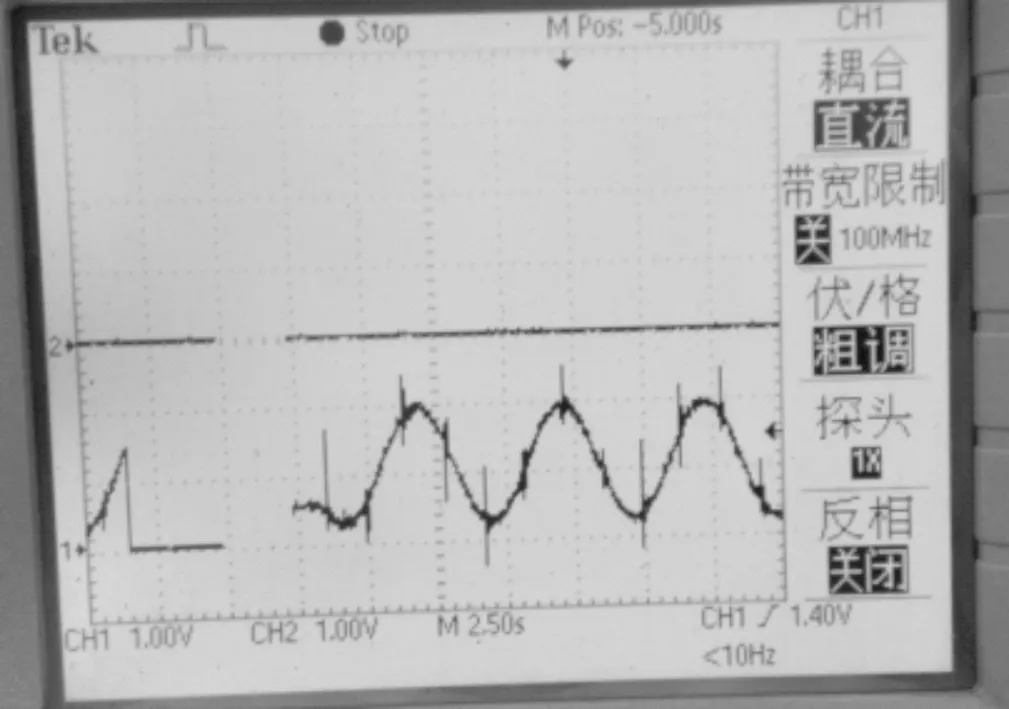
图5 实际输出波形
其次应观测ADC模块的采样结果,验证滤波算法的可行性。将解算角度的代码插入定时器的中断响应函数中,观察ADC模块的转换结果,如图6所示,信号毛刺已被滤除,两路波形的相位正确,但峰峰值不等。分别记录两路波形的峰值和谷值,用作幅值调整。依据式(4)对ADC的采样结果进行幅值调整,将转子手动清零后,驱动曳引机运行,分别记录正交编码器采集的角度值和C、D相解算的角度值,如图7所示,两种角度值贴合紧密,图8表征了二者间的误差,可以看到由C、D相解算的转子机械角具有较好的精度,满足曳引机的启动要求,但由于滤波方法的限制,误差角度值在电机运转过程中存在持续地波动,验证了前文所述的单次计算初始角度后采用叠加脉冲的方式驱动电机的必要性。

图6 滤波后的两路信号波形
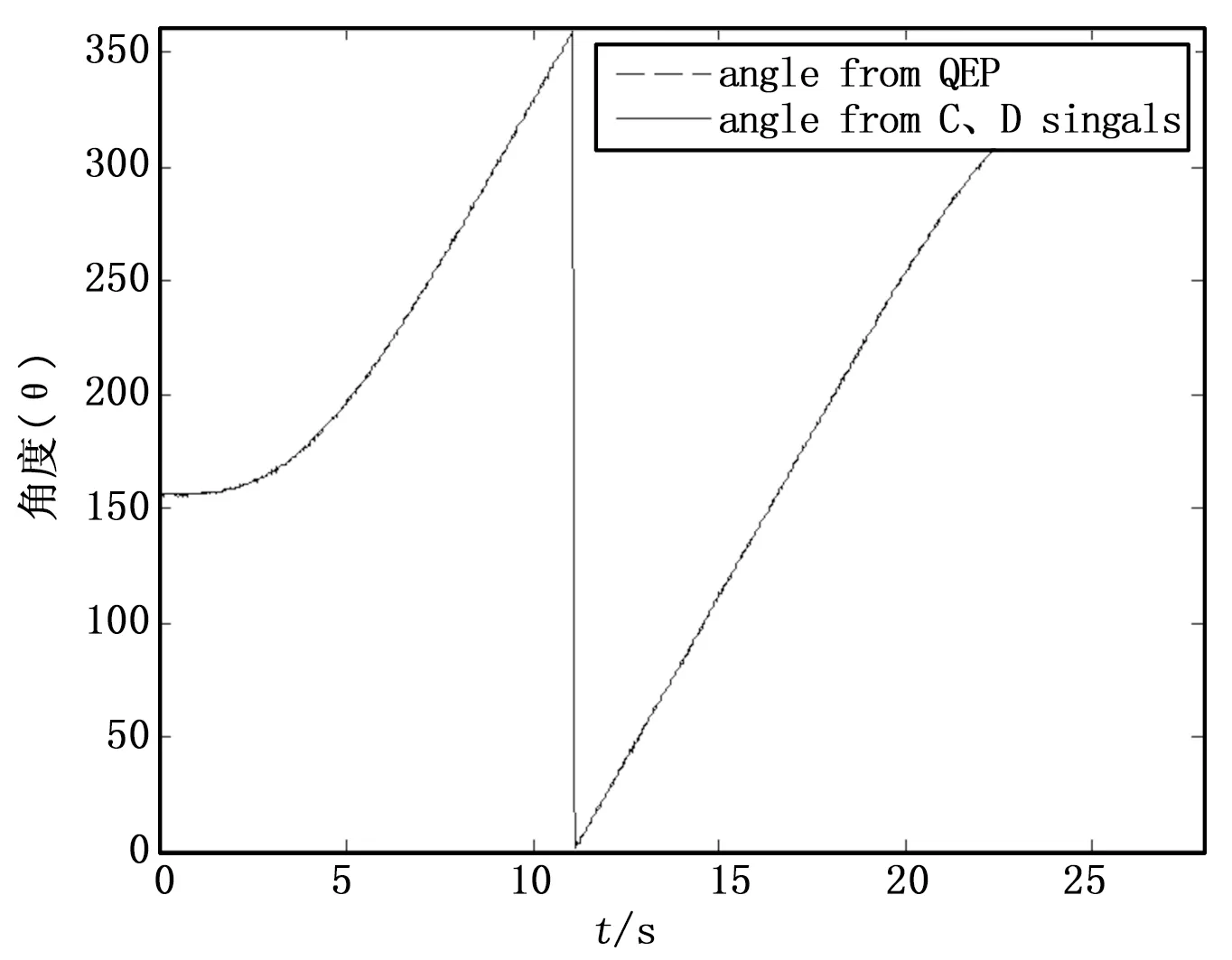
图7 角度对比结果
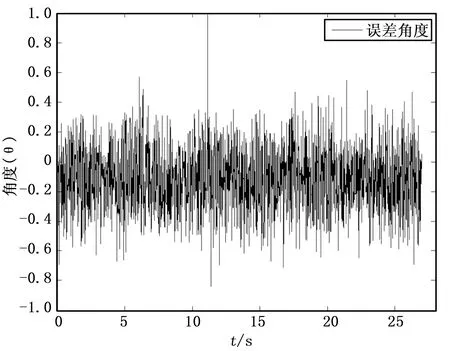
图8 误差角度值
最后,采用单次计算初始角度并叠加脉冲的方式驱动电机连续运行,验证本文提出的方法。速度给定如图9所示,利用C、D相解算的初始角度在转速闭环模式下启动电机,如图10所示,在系统运行零时刻,由sin/cos信号换算的脉冲计数初值正确地叠加到了脉冲计数寄存器的计数值上,角度变化平缓无波动,速度闭环的加速过程稳定平滑,电机运行情况良好。

图9 给定速度曲线

图10 速度闭环运行结果
5 总结
本文针对永磁同步曳引机的转子初始角度检测问题,提出了一种利用正弦增量式编码器的换向信号的检测方法,分析了换向信号的定位原理,设计并实现了信号调理电路和软件滤波方法,在电机启动前检测出转子的初始角度,并利用叠加计数脉冲的方法在增量式编码器首次清零前为系统提供转子位置信息。调试结果表明:初始角度检测准确、电机运行稳定可靠。本文提出的转子初始角度检测方法是可行的,且该方法不依赖电机的数学模型,检测时转子保持静止,具有很高的通用性。
[1] 孙名佳, 林剑峰, 曹文智, 等. 基于三角函数的正弦波编码器信号处理技术研究[J]. 制造业自动化, 2014, 36(1): 9-12.
[2] 黎永华, 皮佑国. 基于磁定位原理的永磁同步电机转子初始位置定位研究[J]. 电气传动, 2010, 40(3): 28-31.
[3] 陈福龙. 基于DSP的永磁同步电动机伺服控制系统研究[D]. 武汉:华中科技大学, 2006.
[4] 李毅拓, 陆海峰, 瞿文龙, 等. 一种新颖的永磁同步电机转子初始位置检测方法[J]. 中国电机工程学报, 2013, 33(3): 75-82.
[5] Lei W. Study on initial rotor position identification of permanent magnet synchronous motor based on high frequency signal injection[A]. Informatics in Control, Automation and Robotics (CAR), 2010 2nd International Asia Conference on[C]. IEEE, 2010, 2: 397-401.
[6] 王子辉, 陆凯元, 叶云岳. 基于改进的脉冲电压注入永磁同步电机转子初始位置检测方法[J]. 中国电机工程学报, 2011, 31(36): 95-101.
[7] Boussak M. Implementation and experimental investigation of sensorless speed control with initial rotor position estimation for interior permanent magnet synchronous motor drive[J]. IEEE Transactions on Power Electronics, 2005, 20(6): 1413-1422.
[8] HEIDENHAIN. 电梯行业用旋转编码器[EB/OL]. http://www.heidenhain.com.cn/fileadmin/pdb/media/img/587718_04_A_03_PUe_Drehgeber_fuer_Aufzugsindustrie_cn.pdf,2016-08-28.
[9] 符 晓, 朱洪顺. TMS320F2833x DSP 应用开发与实践[M]. 北京:北京航天航空大学出版社,2013.
[10] 李 彪, 李黎川. 基于高性能磁链算法的永磁同步电动机无位置传感器控制[J]. 电工技术学报, 2016, 11:7.
A Positioning Method of Initial Rotor Position of PMSM
Yang Jie1,Fan Weihua1,Zhu Mengtao1,Zheng Xin2,Cao Jianxin2
(1.School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China;2.Jiangsu General Elevator Limited Company, Yangzhou 225000, China)
The control of Hoisting machine needs the mechanical angle of the rotor, but the incremental encoder usually cannot provide accurate location information before its clear signal comes. So, the initial position detection of the rotor becomes a problem that must be solved in the control of the traction machine. The traditional method is complicated and the rotor locked or perturbed during the positioning process, which is not conducive to improving the comfort of the elevator system. To deal with this problem, a positioning method of initial rotor position based on the commutation signal of sinusoidal incremental encoder is presented. What’s more, Signal conditioning circuitry and software filtering algorithm are developed in this paper. By sampling the two commutation signals, the initial position of the rotor can be obtained with high accuracy. During the process of positioning, the rotor remains stationary, and the detection accuracy meets the requirements of the motor smooth starting. The experimental results show that the detection method does not rely on the mathematical model of the motor, and has high universality.
PMSM; initial rotor position; motor starting
2016-09-29;
2016-11-11。
国家自然科学基金项目(61673219);江苏省科技成果转化项目(SBA2015030440);江苏省政策引导类计划(产学研合作)——前瞻性联合研究项目(BY2016004-07);江苏省“六大人才高峰”项目(XNYQC-CXTD-001)。
杨 杰(1991-),男,安徽安庆人,硕士研究生,主要从事嵌入式系统的软硬件设计方向的研究。
1671-4598(2017)03-0033-03
10.16526/j.cnki.11-4762/tp.2017.03.010
TP3
A