基于机器视觉的工业机器人分拣技术应用研究与系统开发
2017-03-23卓书芳
卓书芳
(福建信息职业技术学院 机电工程系,福建 福州350003)
基于机器视觉的工业机器人分拣技术应用研究与系统开发
卓书芳
(福建信息职业技术学院 机电工程系,福建 福州350003)
随着科学技术的不断进步,与机器人有关的技术也得到飞速发展,专家和学者关注的焦点也转移到机器人视觉技术方面,从而让机器人也拥有和人眼相似的使用功能。文章研究了基于机器视觉的工业机器人分拣系统,该系统主要包括机器人本体及工件平台、机器视觉和运动控制三大模块,对它们的结构分别进行了设计;最后重点分析了分拣系统中应用的关键技术。
机器视觉;工业机器人;分拣技术;系统设计
经过几十年的视觉技术发展,机器视觉技术的应用已经涉及到精密加工、药品生产、生产流水线、产品包装以及无损检测等领域,并且在容易发生人身伤害或者易于人工操作的领域发挥更加重要的作用〔1〕。需要注意的是,基于机器视觉技术的不确定性和复杂性带来的后续问题并没有得到有效解决,这也是视觉机器人研究急需解决的问题。
1 基于机器视觉的机器人工件分拣系统设计
1.1 机器视觉系统设计
机器视觉系统是整个分拣系统的核心所在,同时合理优化的视觉模式也是机器人能够快速准确进行分拣的关键。需要说明的是,基于机器视觉系统的硬件设计、机器人相机的设定以及识别和追踪工件的智能算法将在后续进行详细说明。
1.2 机器人本体设计
机器人的本体设计是工业机器人分拣系统的重要组成部分,同时也是机器视觉和运动控制设计方案的基础,该结构的有效性和合理性会直接决定了整个分拣系统的整体效果。
当确定分拣机器人的结构方案后,本文采用三维设计软件来进行基于机器人本体的三维建模,具体的结构示意图如下图1所示。
分拣机器人的三维建模示意图如图1所示,其中三轴的活动范围分别为:X轴活动区间:0-500mm,Y轴活动区间:0-600mm,Z轴活动区间:0-600mm,当然还要注重机器人的结构紧凑性。本文根据分拣技术的精度要求,采用滚珠丝杠导轨的方式来实现三轴运动,而且采用滚珠丝杠设计的传动摩擦力较小、运行较为平稳以及反应速度快,通常应用在直线运动类型的机器人。文章采用三菱HC-KFS43型号的交流伺服电机,该电机的输入功率为400W,最高转速可达3000r/min。
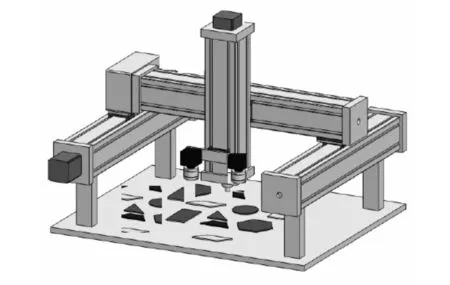
图1 分炼机器人三维建模
2 分拣系统关键技术应用
2.1 摄像机标定技术
摄像机设定的主要目的在于将空间坐标系统转换为立体图像坐标系统,首先会从不同方向采集标定板中的像素坐标以及对应的世界坐标,然后根据像素变换关系来构建像素坐标和世界坐标的映射关系,从而得到基于二维图像的世界坐标的三维映射信息,最后完成摄像机设定〔2〕。摄像机坐标与世界坐标的关系如公式(1)所示。
(1)
其中:R3*3=(RxRyRz)为摄像机的旋转矩阵,T3*1=(RxRyRz)T为摄像机平移向量,R3*3:和R3*1与摄像机的结构工艺有关;(XW,YW,ZW,1)和(XCYCZC,1)分别表示为空间的定点在世界坐标系和摄像机坐标系下的向量。
摄像机坐标系的坐标(Oc,Xc,Yc,Zc)通过针孔摄像机模型的透视和映射处理后,得到基于成像坐标系中的物理坐标(Xu,Yu),如公式(2)所示。
(2)
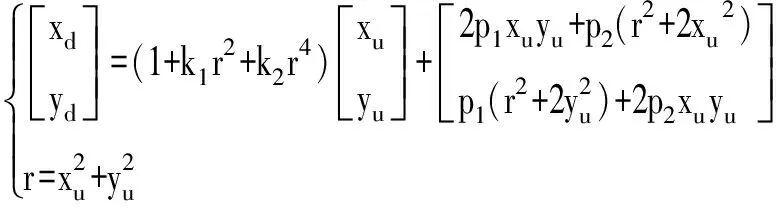
(3)
其中:p1,p2为切向畸变参数,k1,k2为径向畸变参数。
摄像机图像坐标(o,u,v)与成像平面坐标(Od,Xd,Yd)的线性转换关系如公式(4)和(5)所示。
(4)
(5)
其中:(cx,cy)为基准坐标,一般处于图像的中心位置,f代表摄像机的焦距,Δx为相邻像素在水平方向上的距离,Δy为相邻像素在垂直方向上的距离,fx和fy是以单个像素为单位的焦距。具体的公式(6)所示。
(6)
其中:s表示为比例因子,H表示为单应性矩阵或者投影矩阵,本文参照计算机图像坐标和世界坐标系得出方程,由此求出H,由此构建二维坐标系和三维世界坐标系的映射关系。此外还可以利用最小二乘法得到外部参数矩阵、内部参数矩阵以及四个畸变参数,并以此作为标定的最后结果。
2.2 图像预处理技术
图像预处理技术的主要作用就是清除图像中不相关的图像信息,留下有效信息,降低图像处理的复杂度,提高图像的信噪比,以此有效减轻图像处理的压力。显然,图像预处理的效果会直接影响到目标图像的中心、周长、面积以及边界轮廓的描述,这也是图像处理的关键技术。因为在静态识别过程中所处理的工件对象为灰度图像,因此无需针对工件图像进行灰度转换,本节介绍的图像预处理技术的主要功能为图像的平滑去噪。图像预处理技术还要参考系内部的元件、电路噪声干扰以及外部的电磁波等。一般情况下,摄像机收集的图像大多存在噪声,这势必造成图像质量的下降。常见的噪声主要有两种:第一种为椒盐式噪声,这种噪声的幅值相差不大,而且出现的点为随机的;第二种为高斯噪声,这类噪声会随机地出现在图像的每个像素点,而且其幅值也是随机的。在图像处理过程中,通常利用图像平滑技术来消除噪声,但是图像的清晰度和图像平滑处理相互矛盾。当然理想的图像平滑处理技术是在不影响图像质量的情况下清除图像噪音,这往往会造成图像边缘轮廓的模糊化。现阶段,常用的空间域的图像平滑处理方法主要有: 近邻平滑滤波、中值滤波、均值滤波以及自适应滤波等方法。
2.3 角点结合轮廓特征识别技术
文本采用改进型的算子来检测角点,而且算子对于图像的噪声、旋转以及灰度变换有较好的可靠性和稳定性。与常规的检测角点不同,改进型算子能够检测出角点的所属目标。需要注意的是,本文采用的改进型角点检测可以进行多目标处理,首先将目标图像进行分块,然后针对不同图像块提取角点特征,这样不仅有效区分角点的所属性,而且还可以将图像进行平移和灰度化处理,其具体公式如(7)所示。
E(u,ν)=Σw(x,y)[I(x+u,y+ν)-I(x,y)]2
(7)
其中w(x,y)为窗口函数的高斯型平滑因子,I(x,y)为原图像灰度值,I(x+u,y+ν)为图像经过平移后的灰度值。如果进行微小平移,则可以省略高斯项。如公式(8)所示。
(8)
其中:Ix和Iy表示为图像的水平和垂直方向的导数,λmax和λmin为像素点个数的最大值和最小值。当λ1≫λ2或者λ2≫λ1时,所选的为图像的边缘;如果λ1和λ2数值较大时则可将其作为图像角点,该旋转因子R的表达式为:
(9)
一般情况下,k取0.0402,而且R值只和M的特征值相关。R值与角点类型的关系为:当R值为较大的正数时定义为角点,当R值为较小的负数时定义为图像边缘,当R与零值接近时定义为平坦区域。此外要针对旋转因子R进行阈值处理,由此得到局部极大值。需要注意的是,如果增加阈值则图像的角点数目减少;如果减少阈值曾图像的角点数目增大。
3 结论
显然,研究基于机器视觉的工业机器人分拣技术对于机器人手臂的抓取和分拣有着重要促进作用,不仅有效降低机器人工作的错误率,而且显著减少工业生产成本,从而能够创造更多的工业价值。机械工业的定位和摄像机识别技术已经成为整个机器人分拣技术的核心所在,因此具有一定的研究和应用价值。
〔1〕 刘振宇,赵彬,邹风山.机器视觉技术在工件分拣中的应用〔J〕.计算机应用与软件,2012,(11):87-91.
〔2〕 潘丽霞.论工业机器人的发展与应用〔J〕.山西科技,2010,(3):22-25.
Application Research and System Development of sorting Technology by Industrial Robot Based on Machine Vision
ZHUO Shu-fang
(DepartmentofMechanicalandElectricalEngineering,FujianCollegeofVocationalInformationTechnology,Fuzhou,Fujian, 350003,China)
The Paper expounds the sorting system of industrial robot based on machine vision. The main system includes three modules, they are robot and work- piece platform, machine vision and motion control. The structure of them are designed respectively. Finally focuses on the analysis of the key technology in the application of sorting system.
Machine vision;Sorting technology;System design
10.3969/j.issn.1008-3723.2017.01.004
(j)cnki 1008-3723 2017.01.004
2016-12-04
福建省中青年教师教育科研项目"基于机器视觉的工业机器人分拣技术应用研究与系统开发"(JAT160732).
卓书芳(1976-),女,福建屏南县人,福建信息职业技术学院 机电工程系讲师,硕士.研究方向:机电系统辨识与智能控制.
TP242.2
A