红外成像导引头搜索策略优化设计
2017-03-23彭明焱徐琰珂
徐 丹,彭明焱,徐琰珂
红外成像导引头搜索策略优化设计
徐 丹,彭明焱,徐琰珂
(中国空空导弹研究院,河南 洛阳 471009)
通过对影响红外成像导引头截获概率的视场形状、搜索策略等关键因素进行研究,提出了一种新的六边形轨迹搜索策略,并在常用的视场形状(方形及圆形)条件下,与方形、圆形轨迹搜索策略进行对比分析。结果显示本文设计的六边形轨迹搜索策略在圆形视场条件下具有最大的归一化截获场面积,且其对截获时间和搜索周期的变化均最不敏感。采用的研究方法和获得的结果为红外成像导引头的视场选择和搜索策略设计提供了理论依据,具有重要的工程应用价值。
红外成像导引头;视场;搜索策略;截获面积;搜索周期;截获时间
0 引言
评价导弹优劣的其中一个标准是能否高概率地截获目标,因此导引头设计的一个重要指标就是导弹截获目标的概率。对于红外成像导引头来说,影响截获概率的因素主要有来自背景的辐射干扰、导引头的视场状态、载机雷达及弹载装置的测量误差、目标机动等。其中,导引头的视场状态主要指视场大小、形状及搜索策略。为了提高红外成像导引头对目标的截获概率,需要充分发挥导引头对目标的搜索能力,通过导引头进行空间搜索来提高小视场条件下探测目标的概率。因此对导引头的视场形状及搜索轨迹进行研究是相当必要的。
目前研究较多的是多元红外导引头的搜索算法,例如钟录宏[1]、范文同[2]等人都对玫瑰线扫描机制做过大量的研究,但这些都属于红外扫描亚成像,提供的仅是简单的图像轮廓,无法辨认目标的细节,抗干扰特性较差。为了满足导弹发射后截获及抗红外干扰等技术指标,选择采用红外成像导引头[3-4],但目前对其搜索目标的算法研究很少,杨乐[5]、刘桂宝[6]等人提出了3种定向扫描方式,对捕获可行性问题进行了初步探讨,但并未对这3种方式进行对比分析与优化选择,而张晓阳[7]等人也仅仅是对方形、圆形两种搜索轨迹进行了对比研究。本文基于对搜索轨迹的简单化要求,研究了六边形轨迹的搜索算法,并分别在两种视场形状下,与方形及圆形搜索轨迹进行仿真对比,更加全面地分析比较了6种常用的视场形状与搜索策略的组合,为红外成像导引头的设计提供了更全面的理论参考。
1 六边形搜索轨迹的可实现性分析

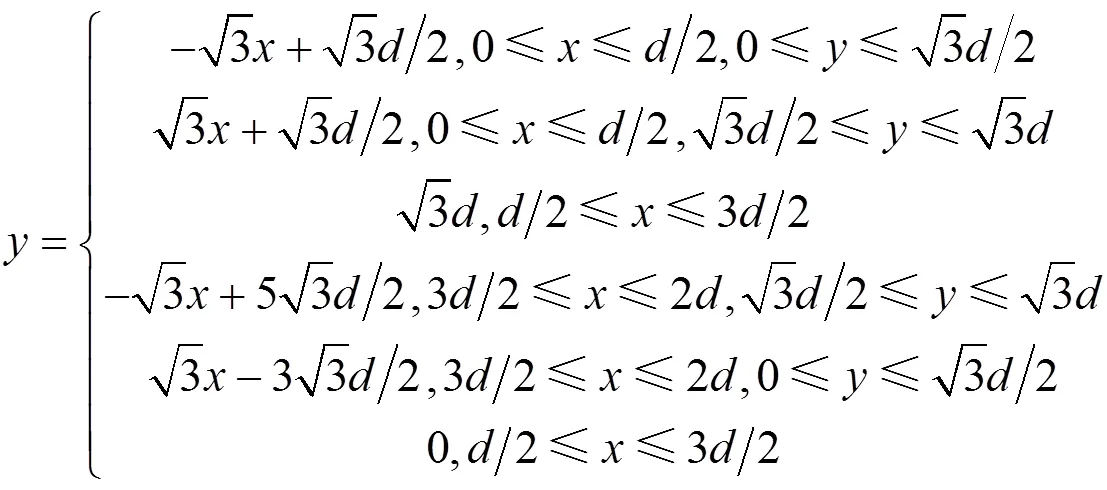
由方程可知六边形搜索轨迹并不复杂,可以实现。
2 方形视场六边形轨迹
设为系统的搜索速度,r为系统的搜索周期,则:
=6/r(2)

图2 方形视场六边形轨迹工作示意图
当截获时间为c时,光轴运动的距离为c。设视场边缘的一点刚好能够被截获,即其在视场内驻留的时间刚好等于截获时间c。当在某一时刻该点刚好逃出视场,则与其对称的点则刚好进入视场。当为方形视场左下角顶点时,、两点的位置如图1所示,两者之间的距离刚好等于c。因此,令c<c。

则要使目标被截获就需要满足:

即:

即:


即:

考虑到区域1、2、3在搜索场中的对称性,可得方形视场六边形轨迹条件下的截获场,如图3所示,搜索场被4组虚线所截出的多边形区域即为截获场。
图3 方形视场六边形轨迹理论搜索场与截获场示意图
因此,方形视场六边形轨迹截获场的面积可大致计算为:

重叠区域面积为:
搜索场的面积为:

3 圆形视场六边形轨迹

在这种情况下,搜索场为具有6个圆角的六边形,如图5所示。
图4 圆形视场六边形轨迹工作示意图

图5 圆形视场六边形轨迹理论搜索场与截获场示意图



即:
对于区域2内截获面积的求解,我们可以类比于图6圆形视场方形轨迹对区域2中截获面积的求解方法[7]。

图6 圆形视场方形轨迹工作示意图
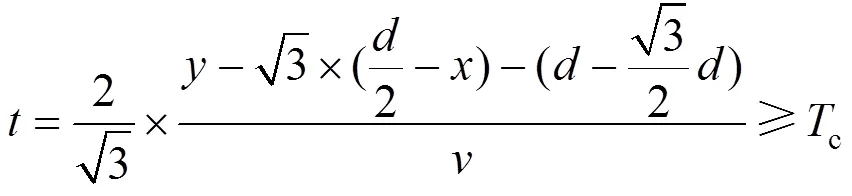
如图所示,区域2中任意一点在视场中不间断的停留时间为:
其中:



因此,圆形视场六边形轨迹截获场的面积可大致计算为:

搜索场的面积为:

4 仿真计算
设系统的视场边长=3.6°,搜索周期r=0.5s,搜索幅度=1°。根据本文对两种视场状态下六边形搜索轨迹的截获场模型的分析,并参考文献[7]中相应视场状态下有关方形及圆形搜索轨迹的公式推导,通过仿真对比获得系统截获场的面积e同系统截获时间c的关系。
为了能更清楚地对比分析导引头搜索目标的6种组合策略,在此将有关方形及圆形搜索轨迹的公式列出,便于参考:
1)方形视场方形轨迹
截获场面积:
式中:=c为截获场在正方形4个角处要截去的等腰直角三角形的腰长。
重叠区域面积:
c=(2-2) (26)
搜索场面积:
=2(27)
2)方形视场圆形轨迹
截获场面积:

重叠区域面积:
搜索场面积:

3)圆形视场方形轨迹
截获场面积:

搜索场面积:
4)圆形视场圆形轨迹
截获场面积:

式中:为截获场比搜索场内缩的距离。
重叠区域面积:
搜索场面积:

需要说明的是:为了适应视场需求且使对比明显,本文分别在两种视场状态下对各搜索轨迹算法进行了仿真计算,其结果如图7、图8所示。图中实线代表方形轨迹,虚线代表圆形轨迹,点划线代表六边形轨迹。

图7 方形视场下截获场面积同系统截获时间的关系

图8 圆形视场下截获场面积同系统截获时间的关系
由于上述6种方式中导引头的搜索场面积有所不同,因此相互之间的比较有失公平,为了得出更准确的结果,本文利用其各自的搜索场面积来对其截获场进行归一化,得到归一化后的截获场面积同系统截获时间的关系。
从图9、图10中可以看出,截获时间越长,归一化后的截获场面积越小。在方形视场状态下,按圆形轨迹搜索得到的截获场对截获时间的变化最不敏感,而在圆形视场状态下,六边形轨迹的结果最好。将此两种组合综合比较,如图11所示,圆形视场六边形轨迹对截获时间的变化最不敏感,为最优的搜索组合。

图9 方形视场下归一化截获场面积同截获时间的关系

图10 圆形视场下归一化截获场面积同截获时间的关系
图11 方形视场圆形轨迹与圆形视场六边形轨迹对比
设系统的视场边长=3.6°,截获时间c=0.05s,搜索幅度=1°。仿真得到系统归一化后的截获场的面积e同系统搜索周期r的关系,如图12、图13所示。
可以看出,随着系统搜索周期的增长,截获场面积均在增大。在方形视场状态下,圆形轨迹的截获场面积对搜索周期最不敏感,而在圆形视场状态下,六边形轨迹的结果最好。综合比较结果如图14所示,圆形视场六边形轨迹对搜索周期最不敏感,为最优搜索组合。
由以上对比可知,按圆形视场六边形轨迹搜索得到的截获场对截获时间和搜索周期的变化均最不敏感,且在相同条件下获得的截获场面积最大,因此在实际中选择圆形视场六边形轨迹搜索策略是最合理的。

图12 方形视场下归一化截获场面积同系统搜索周期的关系
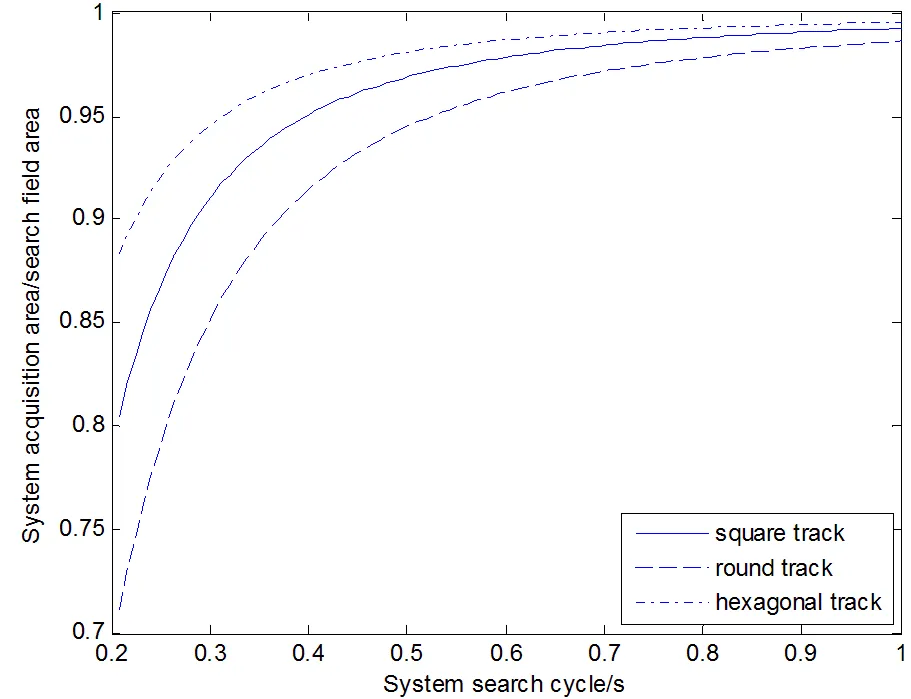
图13 圆形视场下归一化截获场面积同系统搜索周期的关系
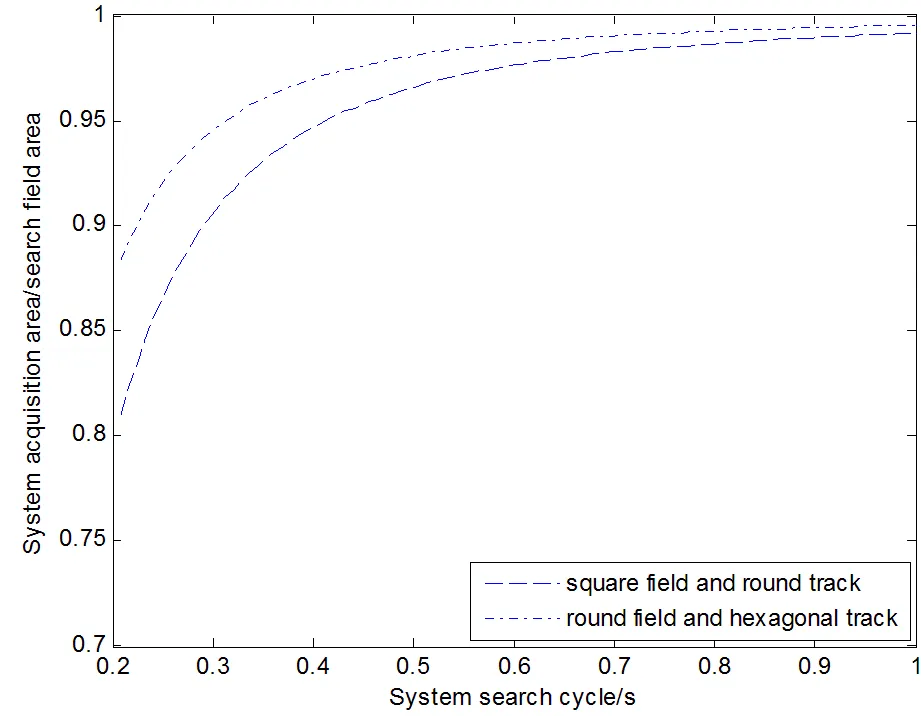
图14 归一化后的方形视场圆形轨迹与圆形视场六边形轨迹对比
实际运用中,导引头的一些指标往往已经固定,因此本文又选择了几组固定指标进行仿真,结果如表1所示(注:方-方即方形视场方形轨迹,其余类推)。由表中数据可以看出:相同指标下,采用圆形视场六边形轨迹搜索策略所得归一化后的截获概率最高。
5 结论
本文侧重分析了视场状态变化对导引头截获概率的影响,并针对目前常用的两种视场形状,对比分析了3种搜索轨迹算法,分别对各种组合下所得的截获场面积和重叠区域面积进行了建模和仿真计算,通过分析可知,圆形视场六边形轨迹算法对截获时间和搜索周期的变化均最不敏感,且其归一化后的截获场面积和重叠面积又均为最大。因此,在实际中选择圆形视场六边形轨迹进行搜索结果最好。

表1 固定指标下6种组合归一化后的截获概率
[1] 钟录宏. 红外亚成像关键技术研究[D]. 南京: 南京理工大学, 2003.
ZHONG Luhong. The key technology study on infrared subpixel[D]. Nanjing: Nanjing University of Science and Technology, 2003.
[2] 范文同, 王星, 纪媛, 等. 玫瑰扫描型导引头目标定位技术研究[J]. 现代防御技术, 2010, 38 (5): 86-90.
FAN Wentong, WANG Xing, JI Yuan, et al. Target orientation technique about rosette scanning infrared seeker[J]., 2010, 38 (5): 86-90.
[3] 范晋祥, 张渊, 王社阳. 红外成像制导导弹自动目标识别应用现状的分析[J]. 红外与激光工程, 2007, 36(6): 778-781.
FAN Jinxiang, ZHANG Yuan, WANG Sheyang. Analysis of application status of ART technologies in infrared imaging guided missiles[J]., 2007, 36(6): 778-781.
[4] 宋磊, 黄长强, 王志军, 等. 红外导引头定向扫描控制研究[J]. 电光与控制, 2010, 17(5): 14-17.
SONG Lei, HUANG Changqiang, WANG Zhijun, et al. On directional scanning control of infrared seeker[J]., 2010, 17(5): 14-17.
[5] 杨乐, 陈少华, 卿建军, 等. 红外导引头定向扫描方式研究[J]. 红外技术, 2004, 26(5): 72-74.
YANG Le, CHEN Shaohua, QING Jianjun, et al. The beamed scan mode study on infrared guide unit in field of view[J]., 2004, 26(5): 72-74.
[6] 刘桂宝, 罗继勋, 黄伟, 等. 红外导引头定向扫描控制软件设计与仿真[J].红外技术, 2006, 28(5): 523-526.
LIU Guibao, LUO Jixun, HUANG Wei, et al. Design and simulation of beamed scan control software for infrared beamed unit[J]., 2006, 28(5): 523-526.
[7] 张晓阳, 徐琰珂, 付奎生. 红外成像导引头视场选择及搜索策略设计[J].红外与激光工程, 2014, 43(12): 3866-3871.
ZHANG Xiaoyang, XU Yanke, FU Kuisheng. Field of view selection and search strategy design for infrared imaging seeker[J]., 2014, 43(12): 3866-3871.
An Optimal Design of Search Strategy for Infrared Imaging Seeker
XU Dan,PENG Mingyan,XU Yanke
(China Airborne Missile Academy, Luoyang 471009, China)
By studying on the key factors which impact the acquisition probability of infrared imaging seeker, such as the area and the shape of the seeker’s field of view and the search strategy, a new hexagonal search strategy was proposed and then was compared with the square and round tracks under popular shapes (square and round) of the view. The result indicates that the new proposed hexagonal search strategy can lead to the largest normalized acquisition area under round field of view, and it is not easy to be affected by the change of acquisition time and search cycle. The adopted study methods and acquired results provide theoretical references for the selection of field of view and the design of search strategy for infrared imaging seeker, and have high value of engineering application.
infrared imaging seeker,field of view,search strategy,acquisition area,search cycle,acquisition time
TJ765.3+33
A
1001-8891(2017)02-0136-07
2016-06-27;
2016-09-02.
徐丹(1992-),女,河南商丘人,硕士研究生。研究方向:红外成像空空导弹发射后截获的关键技术研究。