跨平台的整车电子电器架构的分析与设计
2017-03-23黄少堂梁伟强黄丽芳张雁英
任 强,黄少堂,梁伟强,黄丽芳,张雁英
(广州汽车集团股份有限公司汽车工程研究院,广东 广州 511434)
跨平台的整车电子电器架构的分析与设计
任 强,黄少堂,梁伟强,黄丽芳,张雁英
(广州汽车集团股份有限公司汽车工程研究院,广东 广州 511434)
为了满足车辆“智联化”、“大数据”等技术的设计需求,提出了一种既通用,又具有扩展性的电子电器架构设计方法。根据不同级别车型的特点,从线束设计和网络设计两方面进行平台化和模块化设计,满足了后期功能的扩展,实现了A00~C级不同平台车型系统和功能的复用、智能车联网的无缝搭载。应用结果表明,该架构不仅能够满足多个平台和车型的不同需求,而且可以有效地与车载互联网融合,实现整车数据的最大化共享。
大数据; 互联网; 智能通信; 总线技术; 可靠性
0 引言
随着汽车市场的成熟及竞争的加剧,消费者对汽车安全性、舒适性、便利性等要求越来越高,而汽车的性能提高依赖于电子技术[1]。汽车已经由单纯的机械产品发展为高级的机电一体化产品,即所谓的“电子汽车”。近年来,电子电器系统在整车中的比重不断上升,目前在一款C级车中的电子电器系统成本已经接近总成本的30%。
随着电子电器系统的增加,汽车电器之间的信息交互桥梁——线束和与其配套的电器接插件数量成倍上升,不仅占据了车内的有效空间,而且使得整车质量逐步增大,整车成本逐步提高,系统维护和故障检测的难度不断加大,电子电器系统的可靠性和稳定性难以保证[2]。
同时,随着互联网技术的成熟,汽车与互联网相互结合已成为趋势;“大数据”、“车载互联网”[3]、电商平台等也已成为汽车行业的热门话题。无论是减少线束、降低成本,还是搭建“大数据中心”、实现汽车“互联化”[4]、建立电商平台等,都与整车电子电器架构的设计分不开。本文基于国内外发展情况,详细分析、介绍了一种新型电子电器架构的设计思路与方法,实现了一个跨平台的、可应用于A00~C不同层级的电子电器架构。
1 基本思路
整车跨平台电子电器架构设计过程中最重要的是要实现跨平台。前期需要对整车的多个平台和车型作好规划,对每个平台和车型的配置、功能、定位、成本等作好详细分析。跨平台设计思路如图1所示。在设计平台时,需要考虑多种平台的多款车型的配置、功能、成本等需求,找出其相同点和差异点。在具体设计时,对同一平台下不同车型的差异点进行模块化设计,使各个模块可根据平台和车型需求的不同进行增加或者删减,实现灵活移植。
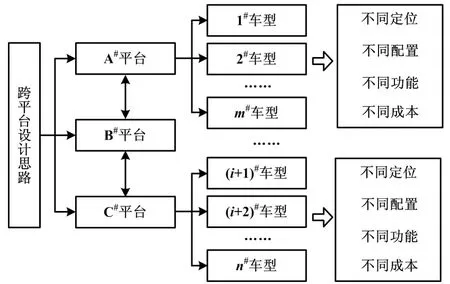
图1 跨平台设计思路示意图
电子电器架构的跨平台设计需要从线束设计和总线设计两方面考虑。
在线束设计上,顺应汽车智能化的趋势,在关键技术电源分配系统(电器盒)设计上应用半导体功率开关及智能芯片,实现整车智能化蓄电池能量管理及整车电源分配智能化,保证整车所有电子控制单元正常供电。
在总线设计上,结合国内外总线发展趋势、车型定位、通信速率及不同客户对安全、舒适、娱乐等性能的需求,综合分析各个系统功能比例、分布区域和通信速率,设计整车电子电器总线架构。
2 线束设计
电器盒的设计是线束设计的一个关键技术。为了实现跨平台的设计,满足电子电器架构的智能化需求,在线束设计上,将传统的电器盒设计为带智能通信功能的智能电器盒,实时监控整车的电源运行状态,进行智能控制,实现电器盒平台化扩展设计;可以根据实际电源分配需求调整软件和接口定义,从而比传统电器盒更快、更智能地实现功能需求。
传统硬线控制中,每个继电器的控制回路都需要有一根电线回路,整车上需要很多根电线回路,大大增加了整车的负载及线路的复杂性。传统的电器盒控制回路如图2所示。
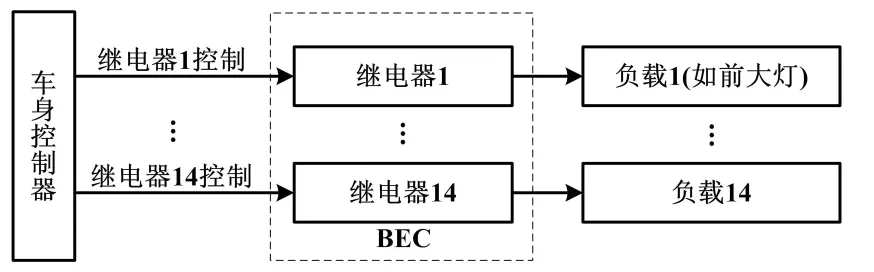
图2 传统的电器盒控制回路示意图
基于控制器局域网络(controller area network,CAN)总线的电器盒中,所有的控制信号全部经两根CAN总线传输给电器盒,可以大大减少电线回路数量,降低整车负载。基于CAN总线的智能电器盒控制回路如图3所示。

图3 基于CAN总线的智能电器盒控制回路示意图
智能电器盒需要根据不同平台、不同车型的需求通断负载,实现以下功能。
①蓄电池能量管理。通过蓄电池传感器实时监控蓄电池的充电状态,在极端用电情况下,控制盒切断部分负载,防止蓄电池电量过低,保证发动机下一次启动所需的蓄电池电量;根据整车用电情况和蓄电池电量情况,提高发动机的怠速转速,减少蓄电池的充放电次数,提升蓄池的使用寿命。
②负载故障智能监控。采用智能芯片,实现负载工作状态的实时监控,当电源回路或负载出现故障时,仪表上显示故障信息,提醒客户对其进行维修。
③暗电流智能管理。根据车辆的停放时间及蓄电池的电量状态,切断部分负载的暗电流,以提高车辆的待机时间。
④故障自恢复功能。使用半导体驱动负载,短路故障解除后,半导体功率开关可自行恢复其功能,无需更换保险丝,从而提升整车的使用便利性。
3 电子电器总线网络系统设计
网络系统是电子控制单元(electronic control unit,ECU)之间实现相互通信、信息共享的基础。网络系统主要包含网络架构/拓扑和网络管理控制策略的设计。
3.1 网络架构/拓扑的设计
网络架构/拓扑主要由网络上连接的ECU所决定。而采用何种总线技术,则由ECU之间传输信息所需要的速率、带宽和可靠性所决定。目前,车载总线技术主要有CAN/LIN/MOST/FlexRay/Ethenet等,它们因波特率、传输介质、开发成本以及面向应用对象不同而被应用在不同车载网络的子系统中。控制器局域网络是一种能有效实现分布式控制和实时控制的串行通信网络[5],是目前行业流行且应用成熟、广泛的网络。1986年2月,由Robert Bosch公司在美国汽车工程师学会(society of automotive engineers)大会上提出控制器局域网络。1990年,Bosch CAN规范CAN 2.0版被提交给国际标准组织,并于1993年11月出版[6]。而本地局域网(local interconnect network,LIN)是一种低成本的串行通信网络[7]。它采用单主/多从结构,不需要总线仲裁,由主节点来控制总线的访问,适用于功能简单的控制单元。CAN/LIN网络已成为汽车行业的主流网络。不同网络特性对比如表1所示。

表1 不同网络特性对比
根据设计的车型平台特点,将整车电子电器系统划分为不同子系统,然后根据不同的子系统选择合适的总线技术设计网络拓扑。不同子系统网络规划如表2所示。

表2 不同子系统网络规划
①音响娱乐系统。音响娱乐系统主要传输音/视频等多媒体数据,需要较高的传输速率和较大的带宽。如视频信息传输需要高达4.4 Mbit/s的速率,这类系统适宜采用面向媒体系统传输(media oriented system transport,MOST)[8]或Ethernet总线技术。
②车身电子系统。车身电子系统主要传输状态指示、显示信号以及一些开关的控制信号等。这些信号的传输对实时性要求不高,只需要较低传输速率(如100 kbit/s)即可,适宜采用低速CAN总线技术。
③动力、底盘系统。动力、底盘系统涉及整车的动力、底盘控制,要求精度高、响应快,对信号传输实时性要求特别高,需要信号传输具有高可靠性和高实时性,适宜采用高速CAN总线技术或FlexRay总线技术[9]。
④驾驶辅助、主动安全系统。驾驶辅助、主动安全系统主要涉及驾驶安全,要求信号传输具备高可靠性和实时响应,适宜采用高速CAN总线技术、FlexRay总线或Ethernet技术。
为满足各个功能子系统对网络带宽、实时性、可靠性的不同需求,考虑到整车网络的扩展性,CAN、FlexRay、Ethernet、LIN和MOST五种类型的网络都应该在汽车上得以应用。但是,不同网络子系统中所采用的网络技术存在很大的异构性。这种异构性不仅体现在网络类型上,而且同种类型的带宽也存在异构性(如高速CAN和低速CAN)。而网关可以用来实现不同子系统之间的互连和异构网络的集成。通过一个中央网关对不同协议进行转换,将各个网络子系统连接起来。CAN、FlexRay、Ethernet、LIN和MOST五种类型的网络与网关之间互连,可实现不同系统、不同网络之间的信号传输。网络架构/拓扑设计如图4所示。
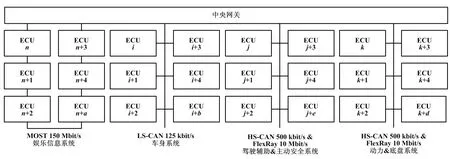
图4 网络架构/拓扑设计示意图
3.2 网络控制策略的设计
网络架构/拓扑设计完成后,需要设计相应的网络管理机制,以协调各个子网之间的通信和实现整个网络系统的唤醒控制、运行监控和休眠控制。
网络管理机制按照控制方式的不同,可以分为主从式网络管理和多主式网络管理。
主从式网络管理定义网络上的某一核心ECU为网络管理者(主节点)、其他节点ECU为从节点,然后通过主节点对网络上的从节点进行管理。它的核心机制是主节点通过监控从节点的报文,掌握整个网络的情况,同时由主节点发送休眠和唤醒命令,控制整个网络的休眠和唤醒。该机制如图5所示。
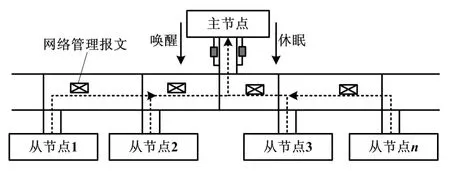
图5 主从式网络管理机制示意图
而目前国际上,多主式网络管理机制较为成熟的有汽车电子类开发系统和对应接口标准(open systems and the corresponding interfacesfor automotive electronics,OSEK)网络管理机制和汽车开放系统架构(automotive open system architecture,AutoSar)网络管理机制。
OSEK网络管理核心机制以“Ring_Token”的方式在不同网络ECU之间建立环状连接,通过相互之间传递专门的网络报文实现对整个网络的管理[10-11]。OSEK网络管理机制如图6所示。
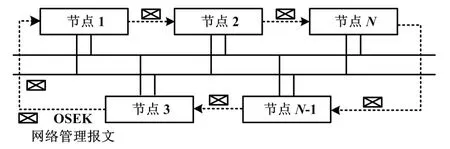
图6 OSEK网络管理机制示意图
AutoSar网络管理核心机制是每个ECU通过接收其他节点专门的网络管理报文,从而自主判断网络的状态以及进行休眠和唤醒的控制[11]。网络设计者根据自身网络系统的应用需求以及开发的成本、难易度等因素,选择不同网络管理机制。AutoSar网络管理机制如图7所示。

图7 AutoSar网络管理机制示意图
4 跨平台架构的设计与实现
如果要实现跨平台的架构,除了以上线束设计及总线网络设计外,还需要一些特定技术来支撑。以下为几个关键技术。
①终端电阻的动态设计技术。终端电阻是网络设计的一个关键参数,每个车型的ECU数目、布置位置等都不同,终端电阻的设计也就不太相同。本文提出一种动态设计终端电阻的技术。定义一套终端电阻计算模型,将ECU布置位置、线束长度及阻抗、ECU等效电容/电阻等参数作为模型的计算系数,使得不同车型根据各控制器的布置位置、线束长度、线束阻抗、节点数量等计算出终端电阻值;各个节点只需微调匹配电阻值,即可实现多车型的复用,进一步保证网络扩展后的可靠性。
②仿真技术。在网络设计时,采用CANoe、Davinci、Vehicle spy等通用的总线仿真工具链对整个平台进行仿真。根据仿真对整个网络平台通信的实时性、信号传输延时情况、通信网络的负载率、标志符(identification,ID)仲裁、网络的睡眠与唤醒等进行分析,把分析结果与设计目标进行比对,对不满足设计目标的项目进行相应调整,从而实现设计上的优化。
③跨平台规范设计。围绕着电子电器架构,从各个节点出发,定义各个ECU信号,建立网络通信矩阵;对各个网段进行整合,寻找共性,编制适用不同网段的规范、流程,形成动力网络设计规范、车身控制网络设计规范、LIN网络设计规范等,对控制单元的总线收发器、总线接口电路、总线的终端电阻、总线的电容、微控制单元(micro controller unit,MCU)的初始化时间、发送总线信号时间、网络管理状态切换的时间等各种参数进行详细的定义。利用这些规范去约束各个网络和ECU的开发,使得各个网络和ECU只要按标准开发,就能无缝接入到电子电器架构。
④测试验证技术。网络设计实现后,采用CANoe、Vehicle spy等通用的总线测试工具链对整个平台进行测试,从单个节点到单个子网到整车网络等逐级进行测试验证,保证平台网络的有效性与稳定性。
此外,在设计过程中,单个节点的硬件资源分配、软件模块的设计都要考虑多车型、多平台的设计,以保证每个ECU都能够快速实现功能扩展,并且能够承担网关作用,扩充新的网络。比如音响娱乐系统可以扩展MOST/Ethernet网络;发动机动力系统(engine management system,EMS)、车身控制模块(body control module,BCM)等能够承担LIN网络主节点任务,扩充LIN网络;防抱死系统(antilock brake system,ABS)可以升级为车身电子稳定系统(electronic stability program,ESP);自动车身水平系统(automotive leveling system,ALS)能够升级为自适应前照明系统(adaptive front-lighting system,AFS)等。这些设计可满足不同层级客户的定制化需求,提升车辆的竞争力。
5 智能车联网的无缝搭载与应用
以上介绍的电子电器架构基于总线架构设计,各个系统的信息都通过总线发布到网络上,实现了不同子系统之间的信息最大化共享,使得整车网络不用作任何变更,便可在原电子电器架构上快速搭载Telematics智能车联网系统。Telematics指通过在车内安装的终端装置,并通过车载网络、无线通信网络以及卫星定位系统等,实现汽车、驾驶员及乘客与服务提供商、内容提供商等的信息交互,为驾驶员和乘客提供定位与导航、路况、交通信息、应急对策、危险区域提醒、远程车辆诊断、网络应用(金融、新闻、E-mail等)等各种移动服务。在车内增加一个车载终端模块,该模块可与中央网关集成,也可另外设置一个控制器,以同时采集各个网段的信息;将智能车联网Telematics系统通过无线网络设备接入汽车网络,可实时获取整车网络上的所有信息,实现远程诊断、远程控制、远程软件刷新、远程启动/熄火等。同时,ESP后台服务器可以将整车的总线诊断数据及车主的驾驶信息存储起来,建立“大数据中心”。研发部门可以通过这些数据进行远程故障排查,故障统计分析、隐患分析、驾驶行为分析等;提出合理化建议,将维修经验进行逐步积累,形成诊断专家数据库;还可以反馈这些数据,作为后期车型研发改进
的参考依据。
6 结束语
本文介绍的跨平台电子电器架构分析与设计方法,是立足于现在国内外总线发展趋势及汽车行业智联化、大数据化的大背景下提出的方案,可以实现各个不同级别的平台车型架构相互转换,以及整车数据的最大化共享。利用了现有、成熟的CAN、LIN网络技术,扩展引入MOST、Ethernet新网络,不仅可以满足不同客户的需求,还可以为企业后期搭载车载互联网及大数据电商平台打下坚实基础。
[1] 韩云武,罗禹贡,赵峰,等.混合动力汽车发动机辅助制动控制方法[J].汽车工程,2014,36(12):1433-1438.
[2] 何长伟,杨殿阁,张涛,等.车联网中车载网络负载与线束优化[J].汽车技术,2014(9):1-4.
[3] 郭迟,刘经南,方媛,等.位置大数据的价值提取与协同挖掘方法[J].软件学报,2014,25(4):713-730.
[4] 段宗涛,康军,唐蕾,等.车联网大数据环境下的交通信息服务协同体系[J].长安大学学报(自然科学版),2014,34(2):108-114.
[5] 张国胜,王书举.基于数据压缩的车身CAN网络优化调度设计[J].汽车工程,2015,37(8):980-984.
[6] 巩少梁.基于2.0协议的CAN总线控制器的设计[D].哈尔滨:哈尔滨理工大学,2014.
[7] 张以磊.基于CAN/LIN总线的车身控制系统的设计与研究[D].太原:中北大学,2014.
[8] 方智,齐勇,刘兆丹,等.基于MOST总线的车载多媒体互动系统[C]//2014中国汽车工程学会年会论文集,2014:562-568.
[9] 王闯.FlexRay总线在线控转向系统中的应用研究[J].自动化仪表,2015,36(8):38-41.
[10]张建军,于萍,张本宏,等.一种改进的AUTOSAR车载网络管理方法[J].电子测量与仪器学报,2013,27(11):1093-1098.
[11]周霖.基于AUTOSAR标准的网络管理栈-SmartSAR NM的设计与实现[D].杭州:浙江大学,2011.
Analysis and Design of the Cross-Platform Vehicle Electrics & Electronic Architecture
REN Qiang,HUANG Shaotang,LIANG Weiqiang,HUANG Lifang,ZHANG Yanying
(The Automotive Engineering Institute of Guangzhou Automobile Group Co.,Ltd.,Guangzhou 511434,China)
In order to meet the design requirements of the technologies of vehicle “Intelligence-Internet” and “Big data”,etc.,the design method of universal and expandable E/E architecture is proposed.In accordance with the features of different level and model of the vehicles,the platforming and modular design are conducted based on wire harness and network styles that fully considering the functional expansion to implement usage sharing of A00~C level different platform vehicle systems and functions,and the seamless connection of the intelligent Internet of vehicle.The results show that this architecture can meet the different needs for multiple platforms and different models,and effectively integrate the Internet of vehicle,to maximize the vehicle data sharing.
Big data; Internet; Intelligence communication; Bussing technique; Reliability
任强(1975—),男,硕士,工程师,主要从事整车电子电器系统的研究及自主开发工作。E-mail:renqiangqiang@gaei.cn。
TP393;TH7
A
10.16086/j.cnki.issn1000-0380.201703023
修改稿收到日期:2016-01-20
