浅谈圆形堆取料机行走机构的啃轨现象
2017-03-17李大庆
刘 旭 李大庆
北方重工集团有限公司
浅谈圆形堆取料机行走机构的啃轨现象
刘 旭 李大庆
北方重工集团有限公司
本文对行走机构的结构和工作原理做了介绍,提出了可能产生啃轨现象的原因,并做了简单的分析,提出了几个方面的注意事项及解决思路。
堆取料机、行走端梁、门架、球铰、车轮、钢轨
1、前言
门架式顶堆侧取堆取料机是一种新型的混匀堆取料机;是建立在予均化理论上的一种工艺设备;能够同时完成堆料和取料工艺,或者分别完成堆料和取料工艺。广泛用于煤炭、水泥、冶金、电力等行业。该设备具有结构紧凑、占地面积小、环保性能突出、技术水平先进、程控水平高等优点。
2、行走机构的结构及工作原理
行走机构由球铰支撑、端梁体、车轮架、驱动装置、主动车轮组、从动车轮组、轴瓦、铰轴、挡轮装置、清扫器等部分组成,见(图一)。
行走端梁座落在外侧环行轨道上,顶部通过球铰支撑门架。门架的部分重量由端梁和环行轨道承受,以减少中心柱承受力。端梁主体支架为钢板焊接而成的箱形结构。共采用四个轮子,每两个轮子用一个小的箱形体连接并构成一个车轮组,共构成两套车轮组。两套车轮组上方分别用铰轴与大的端梁体铰接,铰轴控制其旋转自由度。保证两个车轮同时接触并始终压力相同。端梁体顶部通过球铰与门架铰接,其旋转自由度通过两组车轮组的轮缘控制,由轮缘来阻止其较大旋转位移。使得端梁在行走过程中可以随时进行调整,并补偿实际制造中的误差。
两套车轮组分别布置在端梁的前后两侧,每套行走车轮组均由一个驱动车轮和一个从动车轮构成,车轮组两侧安装有轨道清扫器、缓冲器。车轮为带轮缘的结构形式,并采用挡轮组以处理车轮的啃轨问题。
行走驱动采用减速电机-车轮结构形式,减速器与车轮轴采用空心轴胀套联结,驱动机座通过扭矩臂与箱体固定。电机采用变频电机,通过变频调速来调整取料机行走速度,进而调整取料出力。
3、行走端梁啃轨现象产生的原因
3.1 门架自身变形
门架采用箱型梁结构,是设备中较大截面的弹性体,承载着绝大部分取料机的重量,在运行过程中因为载荷的变化,随时存在着变形和位移。虽然在设计时对其变形进行了处理,但是误差无法完全消除,且部分变形是在运动中出现的。
3.2 轨道安装
所有圆形料场都很难保证轨道的圆度及其与设备的同心度,加上安装公司的能力参差不齐以及轨道在运输过程中的自身变形,极易造成轨道安装问题。例如在某电厂项目中,轨道的安装最大偏差达到200mm,严重超出设计要求。
3.3 行走机构自身的结构形式
在某电厂项目中,行走机构采用带轮缘的车轮加挡轮的结构,由于挡轮和轨道的间隙过小,造成啃轨。
3.4 挡墙高度和仓压造成墙体变形和轨道变形。
4、解决方案
4.1 提高门架的刚度
门架的变形是客观存在的,只能通过优化结构,如调整L1和L2的尺寸等,减小门架的变形量,从而减少对行走端量的影响,如图(二)、图(三)

图(一)行走机构简图
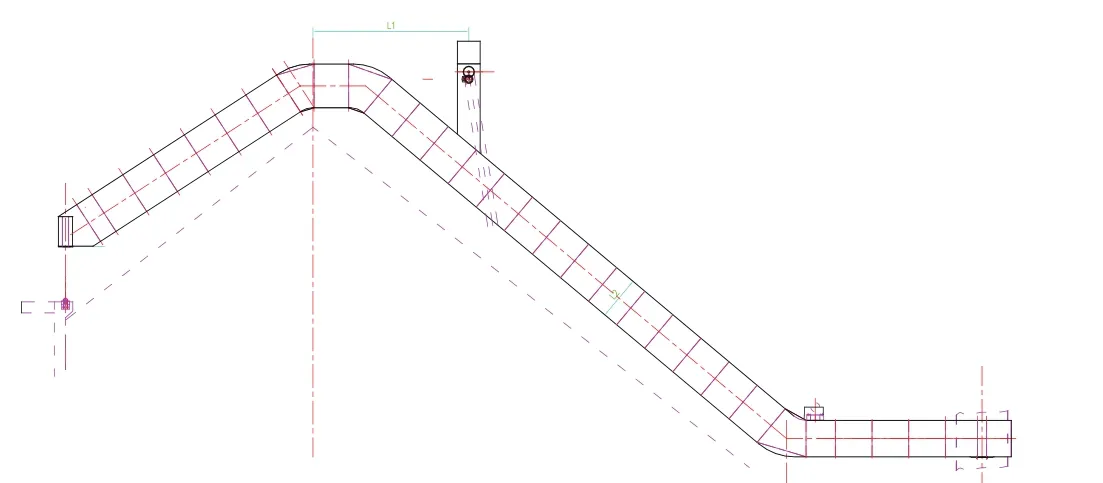
门架简图(二)

测量轨道简图(三)
4.2 提高安装质量,保证轨道安装精度
在现场安装以前进行必要的修复,采取更加适合的测量方法,比如在中柱上部刚安装完还没有安装堆料装置时,找到中心柱的圆心以其为基准来确定轨道的安装位置,而不是简单的仅仅用挡墙做基准或是激光打点的方法。如图三所示A点是中心柱的圆心B点是钢轨的中心,以A点为圆心,以AB之间的距离R1为半径画出的圆就是轨道的安装位置。
4.3 行走机构采用新的结构形式
采用光轮结构替代原带轮缘结构。如图(四)
5、结论
由于对储量的要求越来越大,圆形料场的直径也在不断加大,门架自身的变形对行走的影响也随之加大,行走端梁与门架的连接也由球铰换成燕尾槽结构,带轮缘结构是否有其他方式来保证轨道存在的偏移量是目前需要研究的一个问题,而目前很多项目却在要求轨道有较大偏移量,在没有更好的办法前只能采用不带轮缘结构。

车轮简图(四)
