红外雷达自动定位的3D智能立体停车场
2017-03-15卢祎玮沈世雄
卢祎玮+沈世雄


[摘要]随着社会经济的发展、科技水平的进步,人们生活水平的不断提高,对自由快捷的交通方式有了更多的要求与更高的期望,而汽车作为出行代步的首选正在大量普及。由于我国家用汽车刚性期需求量巨大且人均汽车保有量逐年增加,停车位一位难求的问题出现。而城市中可用土地面积逐渐缩小,可用停车空间的利用率低,使得停车位不足停车难的问题更加凸显。为解决以上问题,并开发已有的停车位上层及其他可用空间,我们的团队提出并基于solidworks软件设计了有广阔市场价值的“3D智能立体全空间停车位方案”。
[关键词]立体全空间停车;3D智能;利用率低;停车难;Solidworks
[DOI]1013939/jcnkizgsc201705176
1现状及趋势分析概述
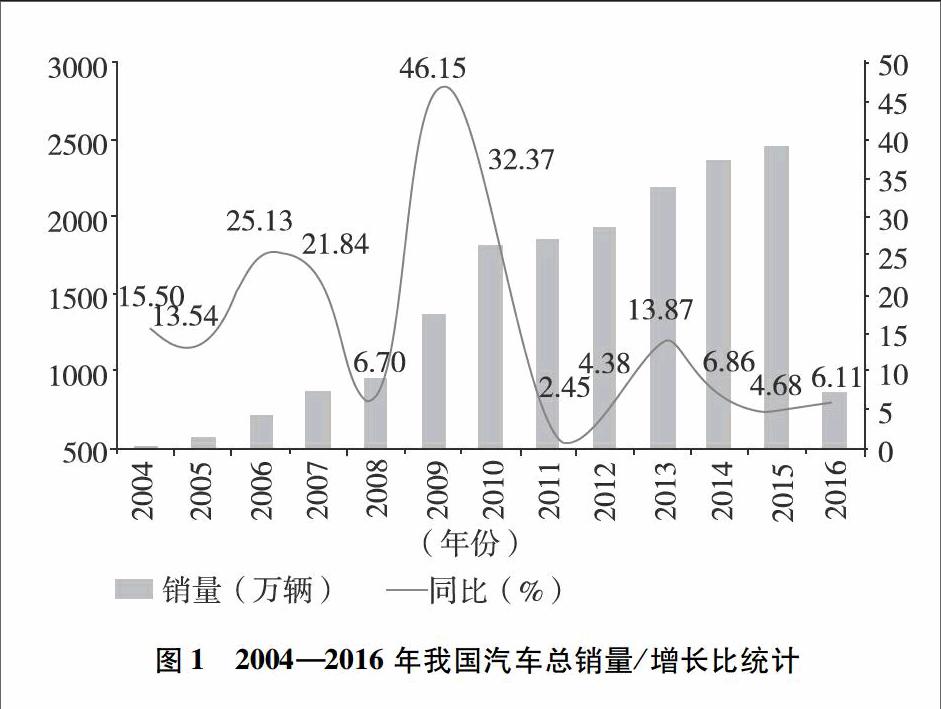
据中汽协统计,2015年中国汽车销量同比增长47%报2460万辆。2016年1~5月汽车产销分别完成10844万辆和10755万辆,比上年同期分别增长58%和7%(见图1)。随着汽车保有量日益增加,停车位不足的问题越来越凸显。而德国、日本已经开发出一套较为完整的立体停车体系,来解决停车位不足的问题。因此开发出一种适合我国国情的立体车库设计方案,有着极大使用及其他潜在价值。
2机构功能分解
21停车平台部分
停车平台部分(见图2)由轮式千斤顶、轮式步进类千斤顶、上承载平台、下拉升定位平台、平面定位组组成。上承载平台包含齿梳型交换设计用于完成车辆停放。中部的一体化顶升机构,用于完成车辆的顶起。轮式步进类千斤顶,用于完成车辆的入库以及复位回程运动。
22卷扬机举升部分
卷扬机举升部分采用电机驱动,在链传动的带动下卷筒进行转动从而完成平台的上升与下降。卷扬机设计通用性高、结构紧凑、体积小、重量轻、起重大的特点,故可以安全高效地完成所需定位任务。
23停车场停车架
双通道三巷道五平台联合运动停车位如(见图3)。停车场车架可按具体需要将层数增加至十几层,多巷道配合卷扬机举升部分可用于完成多平台同时上下运动,五停车平台联动,可用于车辆的快速出入,大大增加车辆停放存储效率。
3创新理念与原理分析
31创新理念
首先,国内外已有立体停车场主要倾向于单一平台上下来完成车辆的停放,本立体停车场解决方案可实现多平台同时運动,来解决多车辆停放问题。其次,该机器将实现高程度的机电一体化,其中最高优先级停车路径选取算法,为车辆停放效率提供了有效的数学计算保证。类流水线功能布置让三大总成机构各司其职,便于管理及维护。停车场外观总览图见图4。
32传动原理
停车平台举升机构传动,采用螺旋传动。将回转运动变换为直线运动,运动准确性高,且有很大的降速比。差动螺旋可以获得微小的位移。结构简单,制造方便。工作平稳,无噪声,可以传递很大的轴向力。卷扬机采用链传动,承载能力高,适用于多种工作环境,是完成车辆顶升的良好选择。
33运动原理
车辆起吊:三巷道顶部分别有三个卷扬机举升机构,当车主将车辆正确停在载重平台上时,电机启动将停车平台吊起,在预定层数停止与层平台进行锁定完成巷道竖直定位,在同停车平台分离后自动复位。
车辆停放:停车平台在水平电机驱动下移动至选定车位。紧接着轮式千斤顶的启动,将上承载平台顶升,到极限高度后轮式进一步千斤顶启动,将车辆送入车库并进行定位检测。入库定位监测合格后轮式千斤顶卸载,将车辆安全放入停车架,最后复位。从而将车辆安全地放置在停车库车架上。
多平台联动:停车平台有停车、等待、上下行三个状态,其中停车与等待为固定状态,其余平台只可选择停止避让或者通过巷道上下行绕行。当卷扬机拉升机构工作时平台将定义成为等待状态。等巷道为空时方可进一步动作。
参考文献:
[1]郑文纬,吴克坚机械原理[M].北京:高等教育出版社,1997
[2]张荣机械原理[M].武汉:华中科技大学出版社,2015
[3]濮良贵,纪名刚机械设计[M].北京:高等教育出版社,2006
[4]李文斌,李长河,孙未先进制造技术[M].武汉:华中科技大学出版社,2014
[5]哈尔滨工业大学理论力学教研室理论力学[M].北京:高等教育出版社,2015
[基金项目]本文系2016年东湖未来之星大学生科研重点项目,项目名称:“红外雷达自动定位的3D智能立体停车场。”
[作者简介]卢祎玮(1996—),男,汉族,湖北十堰人,本科。研究方向:机械设计及机电自动控制一体化;沈世雄(1995—),男,汉族,湖北孝感人,学生,本科。研究方向:机械设计及模拟仿真。
