智能网联汽车体系结构与关键技术
2017-03-14王建强王昕
王建强,王昕
(兰州交通大学交通运输学院,甘肃兰州 730070)
无人驾驶(Driverless)为我们勾画了一幅未来出行的美好蓝图,将出行者从传统机械专注的自驾模式带入充满时尚和乐趣的无人驾驶模式。无人驾驶汽车也称为轮式移动机器人,主要依靠车内以计算机系统为控制器的智能驾驶仪来实现无人驾驶,其实质是一台受软件体操控的可以自由移动的载人计算机。无人驾驶的概念一经提出,便得到学术界和工业界的普遍关注和支持,而无人驾驶技术的核心承载主体是智能网联汽车(Intelligent connected vehicles,ICV)[1-4]。ICV搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(人、车、路、后台等)智能信息交换共享,具备复杂的环境感知、智能决策、协同控制和执行等功能,可以满足出行者多方面的出行需求,并同时提升行车安全,实现节能减排,优化交通资源配置,在一定程度上缓解交通拥堵[5-8]。
智能网联汽车可以从3个维度进行剖析,即“智能”“网联”“汽车”。“智能”即搭载先进的车载传感器,控制器、执行器等装置和车载系统模块,具备复杂环境感知、智能化决策与控制等功能;“网联”主要指信息互联共享能力,即通过通信与网络技术,实现车内、车与环境间的信息交互;而“汽车”是智能终端载体的外观形态[9-10]。从更为广义的角度来看,ICV并不是特指某类或单个车辆,而是以车辆为主体和主要节点,由车辆、道路设施、通信设备及交通控制系统以及数据存储与处理系统等共同构成的综合协调系统,是未来智能交通系统下车联网环境中发挥着重要作用的智能终端[11]。
虽然前景美好,但是智能网联汽车距离批量生产和实际投入使用尚存在较大距离。本文旨在探讨ICV发展现状的基础上,分析ICV的关键技术构成,并探讨ICV未来发展趋势。
一、智能网联汽车现状
智能网联汽车具有较长的产业链,有望成为未来汽车销售市场中的主力车型。ICV可以提供的主要服务类型如表1所示[12]。因此,国内外的多数汽车厂商和信息技术企业都纷纷投入到ICV的研究与试产当中。总体来看,目前的ICV车型可以分为已量产、测试和概念车型3种,如表2~表4所示。

表1智能网联汽车服务类型

表2主流量产车型

表3主要测试车型
二、智能网联汽车体系结构
智能化与网联化在智能网联汽车发展的过程中充当了必不可少的组成部分,图1说明了不同阶段智能化和网联化走向融合的过程中,有关智能网联汽车的综合应用情况[13-15]。
其中,智能化主要指车辆行驶过程中ICV自主的程度高低,其分级情况如表5所示;而网联化是指在车联网环境下,通过车与车、车与路、车与移动互联网之间的数据传递进行信息处理、决策和反馈过程,其分级情况如表6所示。
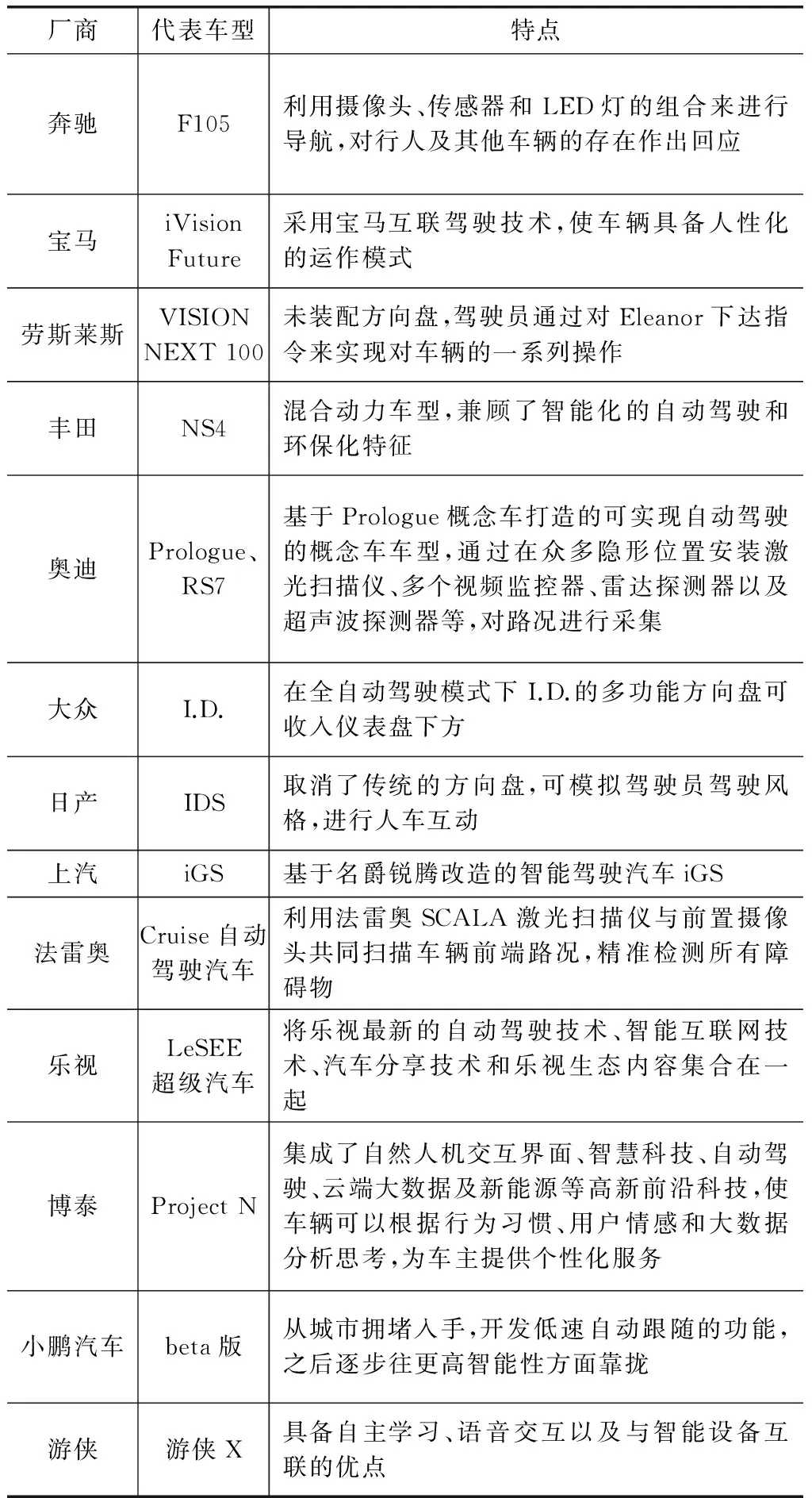
表4主要概念车型
从数据获取、融合、存储与处理的数据流角度分析,智能网联汽车与外界信息交互过程可以分为感知层、决策层、控制层3层,如图2所示。
(一)感知层
借助车载传感器、GPS、雷达等,结合近距离通信技术,实时准确地探测车辆自身状态和周围环境的信息,通过数据融合技术,将各种类型数据依据通信标准进行交互,实现数据共享。
(二)决策层
依据感知层以及云平台获取的信息来进行决策,进而向驾驶员发出辅助决策信息。目前,ICV技术发展还处于借助先进驾驶辅助技术的智能驾驶阶段,所以决策信息主要起到预测、警告、推荐作用,驾驶员掌握车辆行驶的主动权。当ICV发展到较为完备的阶段时,决策层除了车载决策系统之外,还包括智能交通系统后台服务中心的协同决策机制,将车辆可控权限进行了扩展,是真正的智能网联汽车自主驾驶技术的核心部件。
(三)控制层
车辆在驾驶辅助阶段主要进行一些基本的速度和方向控制。融合完备的网联技术后,车辆自主控制将逐步替代驾驶员的人工控制,实现真正意义上的无人驾驶。
三、关键技术
智能网联汽车的运行涉及到环境感知、智能决策以及协同控制这3个层次中的核心处理及操作,包括车辆环境感知技术、通信技术、云平台与大数据技术、多级驾驶辅助技术以及信息安全技术等。
(一)车辆环境感知与通信技术
车辆整体环境信息的及时性、准确性和可靠性需要依赖于车辆环境感知技术。在复杂、动态和多样化的交通环境下,提高环境感知精确程度、对动态目标进行识别与估计以完成交通环境信息的多视图数据融合,是现阶段车辆环境感知面临的三大任务[16]。
车辆所处的环境由自车状态和外部环境所决定。通过环境感知,智能网联汽车获取包括车辆位置、行车速度、移动方向以及各类车内设备参数等自车状态信息,并且借助视频摄像头、雷达传感器、激光测距器等收集车辆外部的交通信号、路面状态、交通状况、行人移动等数据信息,再结合LTE-V2X(Long term evolution-Vehicle to X,LTE-V)或者专用短程通信技术(Dedicated short rangecommunication,DSRC)等近距离通信技术传输数据,采用信息融合技术进行分层存储[17-19]。LTE-V2X技术是一项能够满足复杂的车联网通信需求、支持可扩展的系统架构,并且较为灵活地提供可靠、实时、安全的信息传输技术;DSRC是一种高效的无线通信技术,它可以实现在特定区域内(通常为数十米)对高速运动下移动目标的识别和双向通信,车联网中的车—车通信和车—路通信是DSRC的两种表现形式。
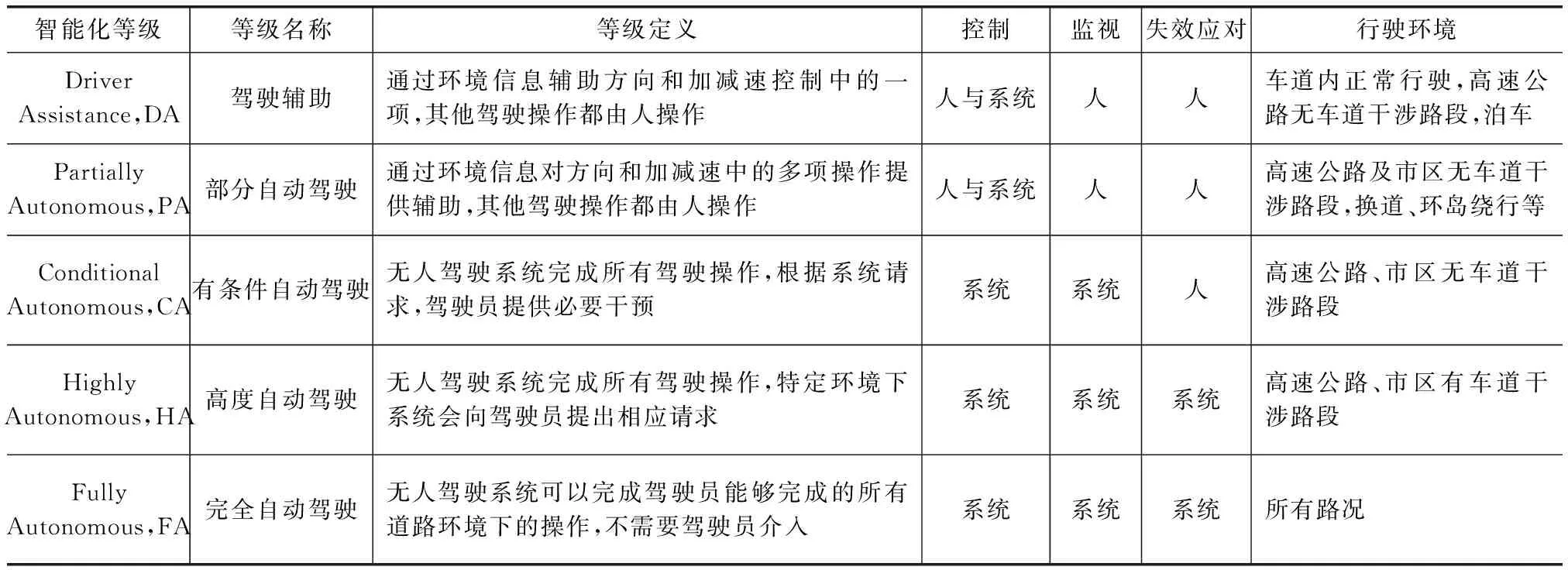
表5智能化等级

表6网联化等级

图1 智能网联汽车的发展路径

图2 智能网联车体系结构
机器视觉与激光雷达技术是实现车辆环境信息采集功能的关键技术,是智能网联汽车感知层在运作过程中不可或缺的重要组成部分。机器视觉与激光雷达通过组合装配,二者互为补充,各有所长,共同组成车辆的视觉传感系统。
机器视觉视场宽,侧向精度高,成本低,不受其他传感器影响,可以提供亮度和深度等更加丰富的平面信息,用于估算如果不躲避检测到的对象会出现危险的可能程度,但机器视觉容易受到环境中的光照等气候因素影响[16]。此技术一般包括多功能摄像、立体摄像以及红外摄像等技术:多功能摄像机用来检测驾驶员面部或者交通道路标记,立体摄像机能够发现危险路况,红外摄像技术可以提供夜间视觉辅助的功能[14]。
激光雷达方向性好,测量角度和距离精度高,不受地面杂波干扰,能在低仰角下工作;不足之处是此技术受恶劣天气、扫描角及分辨率影响较大,对于很细小的柱状障碍物难以识别[16]。激光雷达能够快速地获取扫描平面中的距离信息,并获得障碍物在扫描平面中的外轮廓,对于路面场景中其他车辆、行人或障碍物,道路边界等信息具有不错的识别检测效果。
(二)车路协同技术
车路协同系统(Cooperative vehicle infrastructure system,CVIS)解决车辆与人、车辆与环境等之间的协同交互问题。智能网联汽车发展到成熟阶段,将会运用协同智能交通系统(Cooperative intelligent transportation system,C-ITS),对于车—车通信,车—路通信以及车—云通信3个环节进行更有效的交通状态估计和控制[20-22],如表7所示。

表7车路协同系统构成说明
云平台与大数据技术是实现车—云通信的关键技术。据估计,每辆车每小时的数据上传量就超过20 GB[12],如此之大的数据量只能上传到云平台进行相关的大数据处理和分析。云平台不仅是一个存储数据中心,还是一个信息收发枢纽,进行所有信息的接收、处理和传送。
(三)驾驶辅助技术
驾驶辅助技术是指借助各类车载传感器和通信技术,对车辆、驾驶员以及环境信息及时、准确甚至动态的收集,同时进行辨识、侦测、追踪和处理,进而发出警示,使驾驶员察觉可能发生的危险,或在必要时进行汽车控制的一系列主动安全技术。驾驶辅助技术作为智能网联车发展必经阶段中的关键技术,在辅助驾驶、部分自动驾驶以及有条件的自动驾驶这3个智能化阶段中占主导地位,而高度自动驾驶以及自动驾驶阶段中,网联协同控制执行技术的作用增大。当前,驾驶辅助技术的构成如表8所示。
(四)人工智能技术
从广义上来说,人工智能技术是指运用深度学习、模糊逻辑等方法,在大数据背景下,使机器通过自主学习的方式具备一定程度上的智能,从而可以理解外界事物并做出预判和决策,以提高工作效率和个性化服务水平[23]。面对极其复杂多变的不确定道路行驶环境,具备无人驾驶功能的ICV需要及时准确应对各种情况、具有自主学习和自我决策的能力。而当前的人工智能技术无疑是最佳的选择。在海量行驶数据的基础上,人工智能技术可以通过智能计算和分析,对外界事物进行认知、自主学习以及做出判断及决策,进而决定ICV的行进轨迹和行驶路径[24-25]。
此外,信息安全技术作为智能网联汽车的关键技术,涉及到了智能网联汽车的每一层。信息安全技术包括终端APP的加密防护技术、权限验证技术、防火墙技术、身份鉴别技术、电子身份标识技术、数字签名技术等,对于实现保障传输安全、非法入侵检测以及用户隐私数据保密十分关键。实现大量信息安全、准确、及时交互,是智能网联汽车关键技术发展的重大突破,也关系到智能网联汽车的推广和普及。

表8驾驶辅助技术构成
四、结语
技术的进步和市场的需求共同促进了智能网联汽车的快速发展,以无人驾驶为目标的智能网联汽车受到了学术界和工业界的广泛关注。各种新型的智能网联汽车陆续问世,新颖且充满人性化设计的概念车型让人们充满期待。然而,面临复杂多变的交通路况和难以琢磨的个性化需求,智能网联汽车的发展绝非一日之功。本文仅从智能网联汽车的体系结构与关键技术入手进行初步探析,指出智能网联汽车发展过程中存在的关键技术难题和突破方向,为智能网联汽车的健康快速发展提供参考。
[1] Harper C D,Hendrickson C T,Mangones S,et al.Estimating potential increases in travel with autonomous vehicles for the non-driving,elderly and people with travel-restrictive medical conditions[J].Transportation Research:Part C,2016,72: 1-9.
[2] 陶永,闫学东,王田苗,等.面向未来智能社会的智能交通系统发展策略[J].科技导报,2016,34(7): 48-53.
[3] 康俊民,赵祥模,徐志刚.无人车行驶环境特征分类方法[J].交通运输工程学报,2016,16(6): 140-148.
[4] 潘福全,亓荣杰,张璇,等.无人驾驶汽车研究综述与发展展望[J].科技创新与应用,2017(2):27-28.
[5] 赵福全,匡旭,刘宗巍.面向智能网联汽车的汽车产业升级研究——基于价值链视角[J].科技进步与对策,2016,33(17): 56-61.
[6] Hu J,Park B B,Lee Y J.Transit signal priority accommodating conflicting requests under connected vehicles technology[J].Transportation Research Part C,2016,69: 173-192.
[7] Wang J,Li S.The impact of travelers’ rationality degree heterogeneity in the advanced traveler information system on the network traffic flow evolution[J].Simulation Transactions of the Society for Modeling & Simulation International,2017,93(6): 447-457.
[8] 马书红, 孙朝旭.基于系统动力学的城市交通系统供需分析模型[J].长安大学学报:社会科学版,2017,19(3): 31-37.
[9] Agrawal S,Zheng H,Peeta S,et al.Routing aspects of electric vehicle drivers and their effects on network performance[J].Transportation Research Part D: Transport and Environment,2016,46:246-266.
[10] 黎宇科,刘宇.国外智能网联汽车发展现状及启示[J].汽车工业研究,2016(10): 30-36.
[11] 张懿,刘焰.大数据时代下的智能网联汽车发展研究[J].江苏科技信息,2016(24): 7-9.
[12] Coppola R,Morisio M.Connected car: technologies,issues,future trends[J].Acm Computing Surveys,2016,49(3):1-36.
[13] 王兆,邓湘鸿,刘地.中国智能网联汽车标准体系研究[J].汽车电器,2016,338(10): 15-18.
[14] Faezipour M,Nourani M,Saeed A,et al.Progress and challenges in intelligent vehicle area networks[J].Communications of the Acm,2012,55(2): 90-100.
[15] 欧阳明高.从智能化电动汽车发展的角度谈“互联网+汽车+交通”[J].汽车纵横,2015(9): 20-22.
[16] 黄武陵.智能车辆环境感知技术与平台构建[J].单片机与嵌入式系统应用,2016(8): 9-13.
[17] Guériau M,Billot R,Faouzi N E,et al.How to assess the benefits of connected vehicles? a simulation framework for the design of cooperative traffic management strategies[J].Transportation Research:Part C,2016,67: 266-279.
[18] 谢伯元,李克强,王建强,等.“三网融合”的车联网概念及其在汽车工业中的应用[J].汽车安全与节能学报,2013(4): 348-355.
[19] 马飞跃,王晓年.无人驾驶汽车环境感知与导航定位技术应用综述[J].汽车电器,2015,318(2): 15-19.
[20] 蔡伯根,王丛丛,上官伟,等.车路协同系统信息交互仿真方法[J].交通运输工程学报,2014,14(3): 111-119.
[21] 谢伯元,王建强,秦晓辉,等.基于车路协同的车辆状态估计方法[J].汽车工程,2014(8): 968-973.
[22] Wang J,Niu H.Graded information feedback strategy in two-route systems under ATIS[J].Journal of Traffic and Transportation Engineering:English Edition.2014,1(2),138-145.
[23] 贺倩.人工智能技术发展研究[J].现代电信科技,2016(2):18-21.
[24] Lipson H,Kurman M.无人驾驶[M].林露茵,金阳,译.上海:文汇出版社,2017.
[25] 赵新勇,李珊珊,夏晓敬.大数据时代新技术在智能交通中的应用[J].2017,3(5): 1-7.
