三维技术在潘家口长城烽火台修缮中的应用
2017-03-12韩会伟唐子奇
许 伟 韩会伟 唐子奇
(1.河北省水文工程地质勘查院 石家庄 050021;2.河北省地质调查院 石家庄 050081)
研究主要目的是为文物保护部门提供潘家口长城烽火台修缮工程所需要的三维数据,研究中使用三维激光扫描技术,因为相对于传统的测量技术,三维激光扫描技术具有的明显的优势:它能够完整地重建扫描实物,快速获得高精度原始点云数据,其扫描获得点云中的每个三维数据都是直接采集于目标的真实数据,使得后期处理的成果真实可靠。
此段长城维修性质定位为现状修整,坚持最小干预的原则,所有涉及的补砌、修补、添加等措施均以长城的安全为目的,且与相邻部位墙体相协调,保持整个长城历史沧桑感,保留和展示各时期长城特点,把保证长城安全性和真实性放在首位。
1 研究区概况
研究区长城位于河北省迁西县西北和宽城满族自治县西南部,为宽城县与迁西县共有,地理位置如图1所示。
该段长城是明代蓟镇长城的重要组成部分,始建于洪武年间,嘉靖、万历年间重修。位于河北省迁西县西北和宽城满族自治县西南部,为宽城县与迁西县共有。自潘家口水库1979年蓄水后,部分长城被淹没在水中。淹没线以上长城保存较好,包括砖石长城和石墙长城,内外墙保存基本完整,局部坍塌,墙顶残存地面砖,地面覆盖的积土上生长了大量植物,对长城风貌形成了遮挡,内外侧垛口墙部分残存。由于自然侵蚀和人为破坏,此段长城的墙体、墙芯、垛口墙、宇墙、地面受到不同程度损坏,有的甚至影响长城结构安全。部分外包砖墙坍塌缺失造成墙芯结构松散,加速了城墙破坏速度,部分长城现状如照片1、2。

图1 研究区地理位置概况图

照片1 长城峰火台内部现状

照片2 长城部分城墙现状
2 三维点云内业处理
外业扫描生成的点云数据,需导入进专门的点云处理软件中处理。内业点云处理采用与徕卡C10扫描仪配套的数据处理软件Cyclone8.0。内业处理主要有点云数据导入、球形标靶定位、点云附加照片、点云数据的拼接、点云数据的去噪、点云数据的优化抽稀、点云数据的导出。
2.1 点云数据导入
内业人员在电脑中建立文件夹存放不同次的扫描数据,打开Cyclone软件,并新建数据库,采用扫描仪专用数据线与扫描仪直连的方式,将外业扫描的数据导入电脑中。
2.2 球形标靶定位
软件提示数据导入成功后,打开各测站Model Spaces下的Modelspace View点云文件,按照外业扫描时绘制的球形标靶位置示意图,在点云中确定标靶的具体位置(图2)。

图2 点云中确定球形标耙的具体位置
在外业扫描完成后,徕卡C10三维激光扫描仪内置的同轴相机对各测站都进行全景拍照,Cyclone8.0软件支持直接在点云中附加照片,照片会贴在每一个点云上,可使扫描效果更加真实,方便区分不同材质的墙体,效果如图3所示。按上述方法,对外业扫描的各站数据进行球形标靶定位。
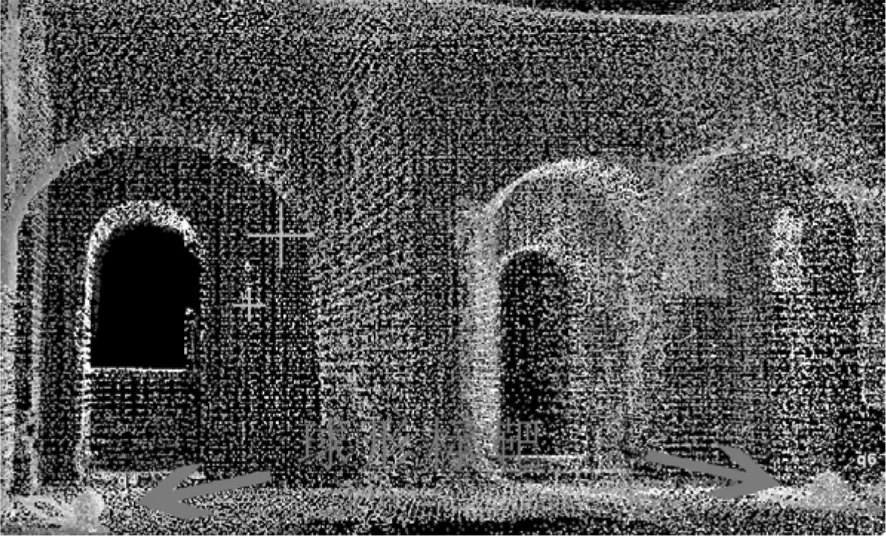
图3 点云数据附加照片后效果
2.3 点云数据拼接
外业扫描时采用球形标靶定位,通过RTK获取了控制点的经纬度及高程坐标,利用徕卡扫描仪自带软件的点云拼接模块进行点云拼接:选中需要拼接的数据所在的文件,创建一个拼接,打开拼接窗口,将要拼接的多个Scan World和测量坐标添加到拼接窗口中,将测量坐标设置为Home Scan World,自动添加约束条件,拼接多站扫描得到完整的Scan World,拼接完成后显示拼接误差,先除去超标误差值,再重新计算误差,直到误差满足项目规定的误差要求,最后冻结这个拼接,生成新的Scan World(图4)。

图4 高精度原始点云数据
2.4 点云数据去噪及抽稀
研究区噪点主要为山上树木、杂草、空气中的灰尘及仪器自身性能造成的散乱点。对于易判别的散乱点,肉眼判别后直接将其删除;对于遮掩造成的噪点采用窗口最小值重复滤波法,可以去除大部分噪点(图5)。

图5 去噪后的点云数据
外业扫描采用的是高精度进行扫描,其具体参数为100 m距离处:水平间距为0.05 m、竖直间距为0.05 m。扫描产生的点云数据量非常庞大,尽管通过去噪后整个点云数据量降低了约20%,但点云数据量仍然庞大,使得后期处理速度非常缓慢。内业人员利用Cyclone8.0软件的抽稀模块Unify Clouds,将点云按照1 m的参数进行抽稀。需要特别注意点云抽稀不可逆,要对点云数据提前备份。
3 三维剖面制作
3.1 点云剖面截取
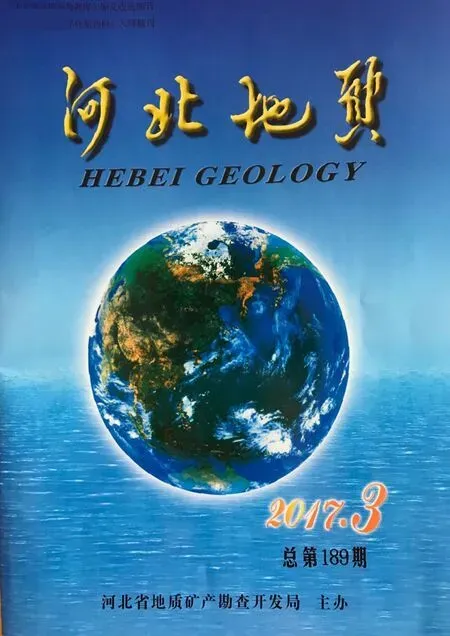
为了勾绘烽火台剖面图,对烽火台三维点云截取多个剖面。按照文物保护部门要求,需要截取烽火台外墙三个面,内部指定位置两个剖面,楼梯中间位置剖面,走廊拱门中间位置东西两处、南北两处共四处剖面。截取的剖面点云如图6、7所示。

图6 烽火台外墙面三维点云截面
3.2 剖面图的绘制
烽火台剖面图可以有效的辅助文物保护设计单位制定工作计划,为文物保护设计单位提供了非常重要的数据。目前各个三维激光扫描仪厂家的自带软件具有绘图功能,但导出格式有限制,常不能和其它工程绘图软件结合使用。因此作业人员需要将点云数据转换到常用的工程绘图软件中进行进一步处理,本次项目采用AUTO CAD软件制作剖面图。
三维扫描仪扫描得到的点云数据量非常庞大,如果直接导出,会因为计算数据量过多而出错,所以在导出文件之前,先要对点云数据进行进一步的抽稀操作。
经过抽稀,将原来数十万个点云数据抽稀减少为5万多个,抽稀后的点云具体数量,在导出数据时可以显示。
图7 烽火台楼梯中间位置三维点云截面
使用AUTO CAD 2012需要加载专用的点云处理模块,如图8所示。

图8 CAD加载点云处理模块
按文物保护设计单位要求,对导出的点云绘制剖面图(图9、图10与图6、图7对应)。烽火台外墙绘制图中,较大不规则图形代表烽火台的观望口,小矩形代表破损的砖块;烽火台外墙绘制图中,平行部分为走廊顶部,弧形部分为拱门。根据导出的点云绘制剖面图,文物保护设计单位再根据剖面图制定修缮计划。

图9 烽火台外墙绘制图

图10 烽火台内部绘制图
4 结论
以潘家口长城烽火台为例,介绍了利用三维激光扫描仪拼接点云数据的方法,详细介绍了如何将Cyclone、AUTO CAD等软件结合起来,通过点云数据进行三维拼接、绘图的整个过程。
将三维激光扫描仪引入文物保护是对传统文物保护方法的扩展与补充,在极大提高工作效率的同时提高了文物修复的精度,而且在某些条件下提供了传统方法难以获得的数据资料。
[1]许伟,李勇,蔡子昭.高精度激光扫描技术在黄安村地质灾害测量中的应用 [J],矿山测量,2015.
[2]邱俊玲.基于三维激光扫描技术的矿山地质建模与应用研究 [D].武汉:中国地质大学,2012.
[3]张会霞.三维激光扫描点云数据组织与可视化研究 [D].北京:中国矿业大学2010.
[4]闫利,崔晨风,张毅.三维激光扫描技术用于高精度断面线生成的研究[J],遥感信息.2007,54-56.
[5]周华伟.地面三维激光扫描点云数据处理与模型构建[D],昆明:昆明理工大学2011.