天空双基地预警雷达空间同步技术研究
2017-03-12王庚袁俊泉王力宝陈阿磊
王庚, 袁俊泉, 王力宝, 陈阿磊
(1.空军预警学院研究生管理大队, 湖北武汉 430019;2.空军预警学院三系, 湖北武汉 430019)
0 引言
单基地天基预警雷达以其平台高、滞空时间长的优势能够有效满足现代预警对于远距离、低空、隐身目标长时间监视的要求[1],但由于该体制雷达信号的传播路径过长、路径损耗过大,对雷达发射功率提出了很高要求,不利于装备研制。天空双基地预警雷达作为一种结合了天基单基地预警雷达和双基地雷达两种体制特点的新型雷达体制,通过有效缩短传播路径,从而降低了对发射功率的要求,同时还能够有效隐藏接收端,提高了整体的安全性能[2]。
杨振起提出了脉冲追赶同步技术实现双基地雷达的空间同步[3],通过控制接收波束指向,使接收波束追赶发射脉冲在空间中的位置,形成了时间顺序上的多波束,大大提高了发射能量的利用率。但现有脉冲追赶技术的几何模型基本都是针对地基双基地[4]或空基双基地雷达[5-6],且只对脉冲追赶过程中的接收波束指向的计算作了简单说明,缺少对脉冲追赶过程中接收波束形成时刻和接收波束驻留时间的理论分析和公式推导[7]。王喜提出了脉冲追赶同步技术存在着空间覆盖的矛盾问题[8],但并未设计相应的解决方案。另外,对于脉冲追赶技术中存在的接收追赶波束驻留时间的矛盾问题还未看到有学者进行相关研究。
本文基于天空双基地预警雷达的空间几何模型[9-10], 针对天空双基地预警雷达的运动特点[11-12], 将适用于传统地基双基地和空基双基地雷达的脉冲追赶同步技术应用到天空双基地预警雷达的空间同步中。首先介绍了脉冲追赶同步技术,对其应用到天空双基地预警雷达空间同步过程中涉及的相关参数进行公式推导;然后分析了脉冲追赶技术存在的空间覆盖矛盾和波束驻留时间矛盾两种不足,并针对不足提出了脉冲追赶技术的改进技术——多波束脉冲追赶技术;最后进行了具体场景下的仿真实验,设计得到相应空间同步方案,通过分析仿真得到的检验参数,对同步技术的可行性进行验证。
1 脉冲追赶同步技术
1.1 脉冲追赶原理
1.1.1 技术原理
所谓脉冲追赶技术,就是通过快速变换接收波束指向,使得接收波束去追赶发射脉冲在空间传播的位置,从而保证所有可能接收到的目标回波始终落在接收波束之内。发射脉冲在窄的发射波束内以接近光速传播,当遇到目标时,产生散射回波,在回波脉冲传播到接收机时,接收波束正好指向目标方向。当发射脉冲以光速沿发射波束方向传播时,接收波束要快速转动,一直追赶发射脉冲的空间位置,直到下一个发射脉冲到达扫描划分区域,即在每一个脉冲重复周期内,接收波束扫描一遍发射脉冲传播过的全部空间。在发射波束移动到新的方向后,接收波束又要去追赶新的发射脉冲空间位置。图1是天空双基地预警雷达使用脉冲追赶技术进行空间同步的扫描示意图。

图1 脉冲追赶技术原理图
从图1所示的脉冲追赶同步的工作过程可以发现,脉冲追赶技术对于接收波束指向的快速捷变能力要求很高,这是一般机械扫描天线难以满足的要求,必须采用相控阵天线,且波束控制技术要采用DBF数字波束形成技术。
利用脉冲追赶技术实现“时间多波束”,从而提高了发射能量的利用率,但脉冲追赶过程中,由于接收波束是一直追赶着发射脉冲在空间中的位置,所以利用单波束沿发射波束指向进行脉冲追赶的距离不能超过发射信号中脉冲周期对应的电磁波传输距离。
传统意义上的单波束脉冲追赶同步技术还存在空间覆盖的矛盾和接收波束驻留时间的矛盾,这大大降低了其空间同步的效果,其技术改进方案详见第2节的多波束脉冲追赶技术。
1.1.2 技术应用
传统的脉冲追赶技术应用在地基或空基双基地预警雷达中,其技术建立在低速或静止的收发端的空间运动模型,因此技术实现相对简单,但天空双基地预警雷达作为一种跨越两种不同运动平台体制的雷达,其运动模型相较于前者有较大差异,且更加复杂。因此要将脉冲追赶同步技术应用到天空双基地预警雷达,需要重新设计同步方案,基于天空双基地预警雷达的空间运动模型进行波位编排并计算相应的波束控制参数。
脉冲追赶同步技术使用时,控制参数中接收波束指向、接收波束形成时刻和接收波束驻留时间的计算过程与单波束空间同步技术中的控制参数计算方法不同,需要重新计算。其中,接收波束指向是指接收追赶波束在随着发射脉冲在空间传播位置的变化而发生变化时的接收波束的指向;接收波束形成时刻是指接收追赶波束在发射脉冲超出接收波束覆盖范围的时刻,同时也是接收波束指向下一位置的时刻;接收波束驻留时间是指脉冲追赶波束保持在固定方向驻留的时间。如何计算得到这3个参数是脉冲追赶技术实现的关键。
1.2 相关参数计算
脉冲追赶同步技术在进行相关参数计算时,通常是将收发波束的重叠区域简化为重叠区域的中心点,不考虑波束宽度对于目标分布的影响。
1.2.1 追赶波束形成时刻
利用脉冲追赶技术进行空间同步时,接收波束是追赶着发射脉冲在空间中的位置而不停地改变着波束指向,图2是脉冲追赶过程中接收区域的变化示意图。

图2 脉冲追赶过程中接收波束覆盖区域的变化示意图
如图2所示,A1,A2,A3,A4,A5分别是发射波束连续覆盖的5个划分区域的中心点,则每个划分区域对应的发射距离分别为Rt1=TA1,Rt2=
TA2,Rt3=TA3,Rt4=TA4,Rt5=TA5;每个划分区域对应形成的脉冲追赶波束的接收距离分别为Rr1=RA1,Rr2=RA2,Rr3=RA3,Rr4=RA4,Rr5=RA5。
有上述参数可以计算发射信号经过每个划分区域中目标反射到达接收天线的传播时间TDi满足:
(1)
假设发射波束的形成时刻是T0,则图2中各个划分区域对应的脉冲追赶波束的形成时间Ti满足:
Ti=T0+TDi
(2)
经过上面的计算,可以得到每个扫描划分区域接收波束的形成时刻,但要进行空间同步,还需要计算每个扫描划分区域对应的追赶波束的驻留时间,下面将就接收波束驻留时间的计算进行详细推导。
1.2.2 追赶波束驻留时间
发射信号脉冲重复频率为fr,则发射信号脉冲重复周期Tp满足:
(3)
发射信号脉宽占比为di,则发射脉冲宽度Di为
(4)
假设di=0.2,则图2中的A1,A2,A3,A4,A5五个划分区域中心点对应的接收追赶波束接收到的发射脉冲随时间的变化示意图如图3所示。

图3 发射脉冲随时间的变化情况
如图3所示,在进行脉冲追赶时,每个接收追赶波束在一个波位的波束驻留时间是Di,当发射信号脉宽占比di=0.2时,最多可以产生5个接收追赶波束,当第5个接收追赶波束驻留时间结束后,则发射波束指向下一个发射波束扫描区域或者开始新一轮的脉冲追赶。整个发射信号脉冲重复周期Tp内每个接收追赶波束只能接收到1个发射脉冲宽度时间Di的目标反射回波,但接收机可以接收到5个发射脉冲宽度时间Di的目标反射回波,保证接收通道在整个发射信号脉冲重复周期Tp中都能接收到反射回波信号。
脉冲追赶技术的一大特点是:接收波束为了追赶发射脉冲的空间位置,需要快速地变换波束指向,在发射波束驻留期间追赶波束指向会变换上百次,可见追赶波束指向计算的重要性。
1.2.3 追赶波束指向
确定追赶波束指向的难点是确定每个时刻追赶波束波束中心在转动地心坐标系中的坐标。在发射波束指向某一波位并保持一定时间波束驻留时,接收追赶波束的指向需要不断变化,始终追赶着发射脉冲在空间中的位置,从而保持接收波束对发射脉冲到达区域的覆盖,因此在脉冲追赶同步技术的实际应用中还需要计算每个波位对应的接收追赶波束的指向。下面计算接收追赶波束中心在转动地心坐标系中的坐标。
如图2所示,共有5个接收追赶波束,假设经坐标转换之后卫星在转动地心坐标系中的坐标为(Xt,Yt,Zt),波位中心在转动地心坐标系中的坐标为(Xa,Ya,Za),则接收追赶波束中心在转动地心坐标系中的坐标(Xi,Yi,Zi)为
(Xi,Yi,Zi)=(Xa,Ya,Za)+
i=1,2,…,5
(5)
2 多波束脉冲追赶技术
脉冲追赶技术通过产生“时间多波束”,提高了系统的能量利用率和目标的数据率,但是,由于发射波束具有一定的宽度,使得接收波束相邻波位中存在多个距离接收天线相等的目标区域,这使得目标回波的接收过程中存在探测区域覆盖和空间覆盖的要求相矛盾的现象,无法保证对所有目标回波的接收,这样会导致部分区域存在盲区。同时,脉冲追赶技术还存在接收波束驻留时间的矛盾,使得发射脉冲无法被完成接收,从而降低雷达的整体性能。本节主要针对上述两大矛盾进行分析,并针对具体矛盾提出相应的解决方案。
2.1 双波束脉冲追赶
2.1.1 空域覆盖的矛盾
由于收发距离达几百公里,可以假设收发波束都是平行波束,如图4所示,通过简单的几何推导可以得到,经过D点的电磁波的收发距离之和折线BDF与经过C点的电磁波的收发距离之和折线ACE相同,其物理含义是D点和C点的反射回波同时到达接收天线,实际上,线段CD上所有目标的反射回波同时到达接收天线;同理,G点和H点的反射回波也同时到达接收天线。那么,在上述结论之下可以得到:图4中三角区域CDG中的目标与三角区域CGH中的目标的反射回波到达接收天线的时间一样。这样导致一个矛盾:在接收区域CDG的目标回波时,区域CGH的目标回波就无法接收,即探测区域的覆盖与空间覆盖要求相矛盾。

图4 脉冲追赶空域覆盖的矛盾性
2.1.2 双波束脉冲追赶原理
为了解决上述空间覆盖的矛盾,本文提出了双波束脉冲追赶的空间同步技术,如图5所示,在接收波束的下一个脉冲追赶波位处,利用DBF技术同时再形成一个接收波束2,接收已经传来但接收波束1无法接收的目标回波。在接收波束1覆盖区域的回波都接收完毕后,保持接收波束2不同,将接收波束1改变方向到接收波束2后面的波位,这样接收波束1和接收波束2交替循环,形成双波束脉冲追赶,保证了监视区域反射回波的完全接收。

图5 双波束脉冲追赶技术原理图
2.2 三波束脉冲追赶
2.2.1 驻留时间的矛盾
完全接收到一个目标的脉冲回波需要接收波束驻留至少一个脉冲长度的时间,如图6所示,在接收双波束覆盖平行四边形CHGD区域时,在接收经过H点的反射回波的驻留时间中,发射脉冲会继续沿发射波束方向传播到O点,这样当接收波束将H点的反射回波接收完毕后再去接收平行四边形HOPG区域的反射回波,则无法接收到HOPG区域目标的所有的脉冲回波,只能接收到部分脉冲回波。针对上述问题,本文提出了三波束脉冲追赶的技术。

图6 脉冲追赶波束驻留时间的矛盾性
2.2.2 三波束脉冲追赶技术原理
如图7所示,在双波束脉冲追赶技术上,在接收波束2的下一个波位再形成一个接收波束3,保证HOPG区域的反射回波完全接收。其中,接收波束1在驻留到一个脉冲长度时间后,指向接收波束3后面的波位,同时接收波束2和接收波束3保持驻留状态;在经过一个脉冲长度的时间之后,接收波束2指向接收波束1下面的波位,同时接收波束3和接收波束1保持驻留;在经过一个脉冲长度时间后,接收波束3指向接收波束2下面的波位,同时接收波束1 和接收波束2保持驻留,然后依次循环。

图7 三波束脉冲追赶技术原理图
图8是脉冲追赶过程中接收波束对应的波位划分情况。

图8 脉冲追赶过程中扫描波位划分
发射脉冲宽度时间Di,则图8场景下进行三波束脉冲追赶时,假设发射波束的位置不发生变化,则3个接收波束指向上的变化情况如表1所示。

表1 三波束脉冲追赶接收波束指向变化
通过观察表1可以看出,进行三波束脉冲追赶时,每个脉冲追赶波束的平均波束驻留时间为3个发射脉冲宽度时间Di。
3 仿真实验与分析
3.1 仿真参数设置
模拟天空双基地预警雷达对我国周边某一固定区域实施预警监视的场景。仿真场景中只使用一颗卫星和一架飞机,整个监视过程持续1 min,在第30 s左右,卫星飞过监视区域中心的上空。整个波束扫描过程中,收发波束在每个波位的驻留时间是固定的,这样每个波位对应区域的脉冲积累时间是相同的。
整个扫描过程中飞机沿东经118°线向北飞行,出发点位于北纬29.975°。
监视区域设置在东经119.5°到东经120.5°,北纬29°到北纬31°,监视区域高度从地面到距离地面垂直高度30 km之间。整个监视区域东西跨度为110 km,南北跨度为220 km,高度跨度为30 km。
波位编排方案即监视区域划分方案如图9所示。

图9 波位编排方案
整个监视区域按照经度方向均分为10份,纬度方向均分为20份的区域划分,方案共划分为200个波位,每个波位对应的扫描区域为经度跨度为0.1°,纬度跨度为0.1°,高度跨度为30 km。
扫描过程中,发射波束从图9中阴影区域开始扫描,按照先沿纬度方向向北,再沿经度方向向东的扫描方式依次扫描每个波位,每个波位的波束驻留时间为2 ms,脉冲积累数为100。整个扫描过程中,雷达对监视区域共扫描150次。
3.2 仿真结果与分析
为了验证基于脉冲追赶同步技术的空间同步方案的可行性,下面对仿真实验得到的波束指向误差、接收信噪比和空间覆盖率三个检验参数的仿真结果进行分析。
3.2.1 波束指向误差
发射波束指向误差和接收波束指向误差随时间的变化情况如图10、图11所示。从图中可以看出,发射波束指向的最大误差为20.259 1 m,而发射波束覆盖宽度最小值为12.171 3 km,误差只占0.2%,影响不大;接收波束指向的最大误差为1.145 4 m×10-10m,误差可完全忽略。所以空间同步方案的波束指向符合空间同步的要求。

图10 发射波束指向误差随时间变化情况

图11 接收波束指向误差随时间变化情况
3.2.2 接收信噪比
接收信噪比在空间上的分布情况和随时间的变化情况如图12~图14所示,其中,图12为单次扫描整个监视区域接收信噪比的分布图,图13为10次扫描整个监视区域接收信噪比的分布图,图14为10次扫描单个波位接收信噪比随时间的变化关系图。

图12 监视区域的接收信噪比分布图

图13 10个扫描周期中的波位接收信噪比的三维图

图14 10个扫描周期中波位接收信噪比的变化情况
观察图12~图14可以得到如下结论: 1) 接收信噪比的最小值为11.206 5 dB,大于11.2 dB,满足检测信噪比要求,所以空间同步方案的波束驻留设计符合空间同步的要求; 2) 靠近飞机一侧监视区域的接收信噪比更大,靠近飞机所处纬度区域的接收信噪比更大; 3) 由图12 可见,按照固定脉冲积累数的扫描方案,使得接收信噪比在空间上的分布不均,部分波位的接收信噪比超过了17 dB,造成能量的利用率不高,可以通过控制每个波位的波束驻留时间使得接收信噪比分布均衡。
3.2.3 空间覆盖率
空间覆盖率在空间上的分布情况和随时间的变化情况如图15~图17 所示,其中图15为单次扫描整个监视区域空间覆盖率的分布图,图16为10次扫描整个监视区域空间覆盖率的分布图,图17为10次扫描单个波位空间覆盖率随时间的变化关系图。从图中可以得到如下结论: 1) 空间覆盖率最小值为112.27%,实现了对监视区域的无缝扫描,所以空间同步方案的空间覆盖设计符合空间同步的要求; 2) 远离飞机一侧监视区域的空间覆盖率更大,远离飞机所处纬度区域的空间覆盖率更大; 3) 由图16可以发现,接收信噪比在空间上的分布极其不均,部分波位的空间覆盖率超过了260%,因此可以通过灵活设计波位编排方案使得空间覆盖率分布更均衡、发射能量的利用率更高。
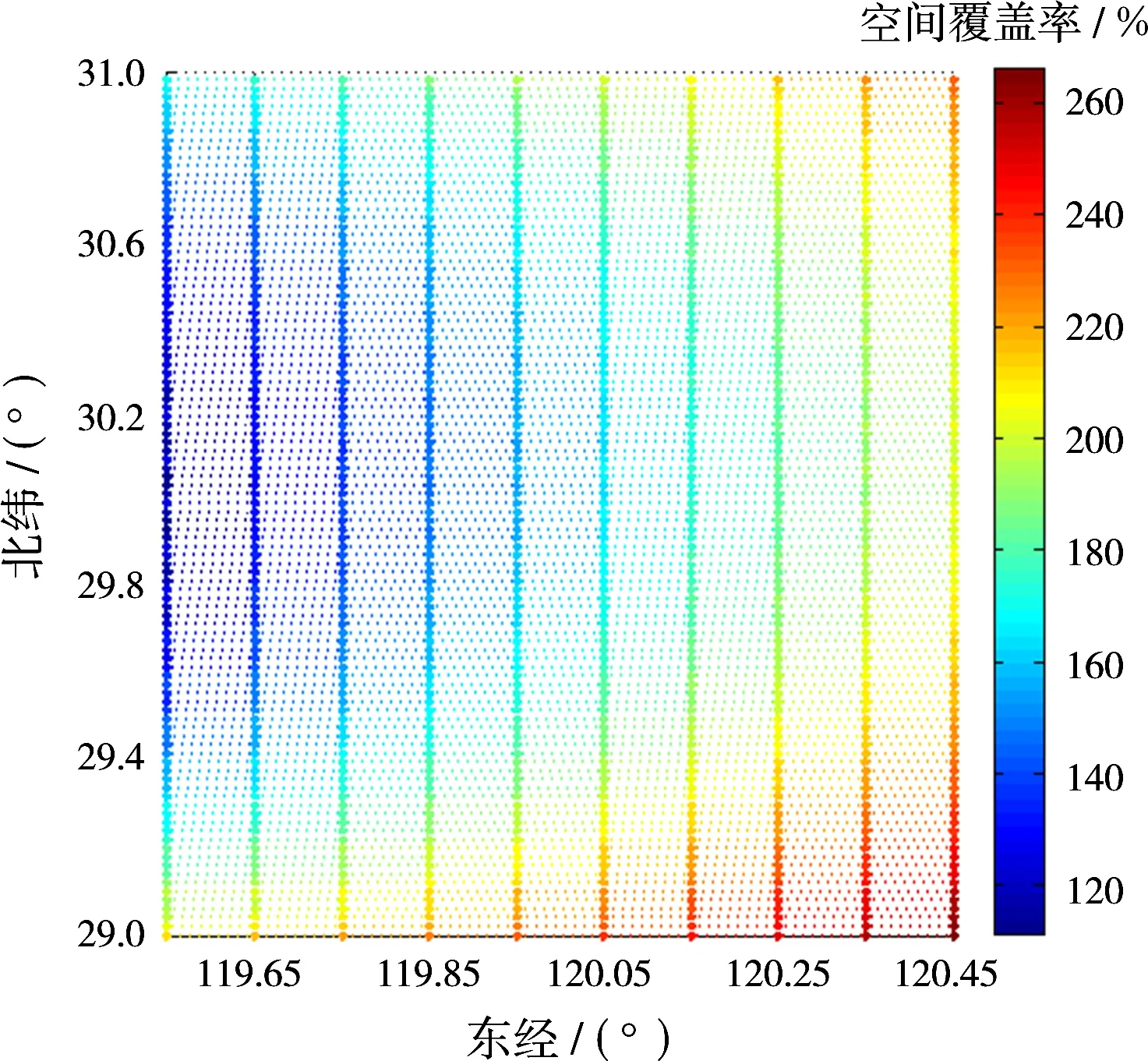
图15 监视区域的空间覆盖率分布图

图17 10个扫描周期中空间覆盖率的变化情况
综合上述分析,可以得到脉冲追赶同步技术校验参数表如表2所示,即设计的空间同步方案能够实现收发波束的空间同步,实现对目标区域的预警监视功能,该方案可行,单波束空间同步技术可以有效运用到天空双基地预警雷达的空间同步中。

表2 检验参数统计表
4 结束语
本文主要针对天空双基地预警雷达的空间同步技术设计问题进行研究。将脉冲追赶3种空间同步技术应用到天空双基地预警雷达的空间同步问题中,对相关参数设计和计算进行了推导;然后,对脉冲追赶技术中存在的不足进行分析并提出了相应的改进方案;最后,针对具体仿真场景设计出空间同步方案,并通过仿真实验对同步方案的可行性进行了论证。由理论分析及仿真结果可知:
1) 脉冲追赶同步技术应用到天空双基地预警雷达的空间同步中,并且可以达到与单基地雷达同样好的扫描性能、测量精度和分辨率,并且时域滤波和空域滤波相结合的扫描方式可以滤除副瓣杂波;但其接收波束控制十分复杂,对信号处理和数据处理速度要求高,增加了装备的制造难度和成本。
2) 脉冲追赶技术自身存在空域覆盖和驻留时间两种矛盾,结合同时多波束技术设计的多波束脉冲追赶技术能够有效化解矛盾,提高空间同步的效率。
[1]贲德,龙伟军. 天基雷达的关键技术[J]. 数据采集与处理, 2013, 28(4):391-396. BEN De, LONG Weijun. Key Technology of Space-Based Radar[J]. Journal of Data Acquisition and Processing, 2013, 28(4):391-396.(in Chinese)
[2]贲德,王海涛. 天基监视雷达新技术[M]. 北京:电子工业出版社, 2014.
[3]杨振起,张永顺,骆永军. 双(多)基地雷达系统[M]. 北京:国防工业出版社, 1998:31-84.
[4]刘张林,高新成. DBF及脉冲追赶技术在双基地雷达中的应用[J]. 现代雷达, 2006, 28(2):32-35.
[5]徐晓靖. 基于运动平台的双/多基地雷达系统及其关键技术[J]. 船舶电子对抗, 2011, 34(3):43-45. XU Xiaojing. Bi/Multi-Static Radar System Based on Motion Platform and Its Key Technologies[J]. Shipboard Electronic Countermeasure, 2011, 34(3):43-45.(in Chinese)
[6]马彦恒,宋瑶,董健. 空地双基地雷达空间同步研究[J]. 雷达科学与技术, 2015, 13(1):65-69. MA Yanheng, SONG Yao, DONG Jian. Research on Spatial Synchronization in Air-Ground Bistatic Radar[J]. Radar Science and Technology, 2015, 13(1):65-69.(in Chinese)
[7]王喜,王更辰,朱瑞. 机-机双基地雷达空间同步技术研究[J]. 微计算机信息, 2009, 25(28):162-163.
[8]王喜,王更辰,刘文辉. 机-机双基地雷达接收波束形成[J]. 火力与指挥控制, 2010, 35(12):104-106. WANG Xi, WANG Gengchen, LIU Wenhui. Research on Receiving Beam Direction of Bistatic Radar on Airborne Plat[J]. Fire Control & Command Control, 2010, 35(12):104-106.(in Chinese)
[9]袁博资,马晓岩,袁俊泉,等. 天空双基地雷达体制分析和参数设计[J]. 空军预警学院学报, 2014, 28(2):89-96.
[10]黄忠言,袁俊泉,王力宝,等. 天空双基地预警雷达非平稳杂波特性分析[J]. 空军预警学院学报, 2015, 29(4):235-238.
[11]王庚,袁俊泉,王力宝,等. 天空双基地预警雷达空间同步设计分析[J]. 空军预警学院学报, 2016, 30(2):89-94.
[12]王庚,袁俊泉,王力宝,等. 天空双基地预警雷达空间同步方案设计[J]. 空军预警学院学报, 2016, 30(6):404-409.