基于ADS-B的雷达数据采集评估系统设计
2017-03-12何彬兵汪在华
何彬兵, 汪在华
(1.中国电子科技集团公司第三十八研究所, 安徽合肥 230088;2.孔径阵列与空间探测安徽省重点实验室, 安徽合肥 230088)
0 引言
现役情报雷达面临的电磁环境越来越复杂,为了应付这些复杂的电磁环境,雷达采取了多种抗干扰措施,但是由于缺乏相应的雷达性能评估设备,用户无法掌握在复杂电磁环境下雷达的性能发挥情况。
ADS-B的主要信息是飞机的四维位置信息、飞机的识别信息和类别信息以及其他附加信息,如航向、空速、风速、风向和飞机外界温度等[1]。航空电子设备接收来自全球卫星导航系统(GNSS)的位置信息,然后广播其位置和其他数据信息给装备了ADS-B接收装置的地面设备或地面站[2]。由于ADS-B系统使用的是全球卫星导航系统报告的已知位置和参数向量,而不用询问雷达,它融合了飞机上GPS和相关设备的数据来生成一个三维位置和状态向量参数,其经纬度误差一般小于20 m,地面接收设备可通过接收1 090 MHz工作频率[3],来完成对目标的检测和定位。因此,如果通过ADS-B地面设备获得的数据作为雷达评估和标校真值来使用,其覆盖距离和经纬度误差应能满足一般雷达测量要求,雷达评估和标校结果的可信度取决于真值的稳定性、可信度和多次测量的一致性等[4]。
1 系统设计
雷达数据采集评估系统是一个集数据采集、数据分析、通信与监视于一体的信息系统,系统通过实时采集民航目标ADS-B信息(经度、纬度、高度及航向),对民航广播信息进行滤波解析,根据民航航班ICAO地址分辨民航目标并形成目标航迹信息,与雷达对同一目标同期实时采集的数据进行对比分析,计算出两者之间的差值及均方差,从而验证雷达相关参数的有效性及精确度,同时为调整雷达相关参数提供依据,实现对雷达的性能评估。系统框图如图1所示。
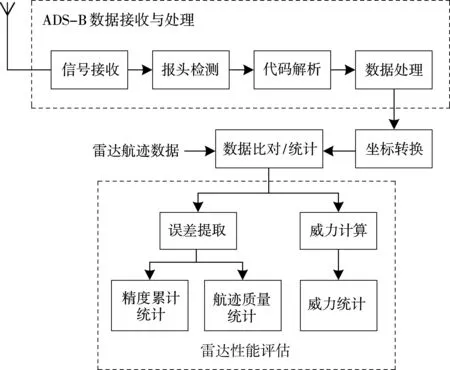
图1 系统框图
ADS-B数据解码过程如下:接收到ADS-B报文数据包后,解析报文数据包,按照报文数据项所代表的含义将其取出并放入相应的参数变量中(目标航班号、当前经度、纬度、高度等);ADS-B信息中的经度、纬度、高度隶属于大地坐标系,而雷达一般采用的是极坐标系,为了实现ADS-B信息坐标数据与雷达航迹坐标数据的匹配,ADS-B目标数据需进行坐标转换[5]。
系统通过雷达上报端口接收雷达航迹数据,经过航迹相关处理,找到与之对应的ADS-B目标数据,目标累计多帧数据后进行系统误差、标准差统计计算。综合多批目标数据,逐一计算对应的系统误差和标准差,再加权计算出雷达总体精度误差(距离和方位的系统误差和标准差)。同时,可以统计威力范围内雷达跟踪的目标数和接收到的ADS-B目标数,统计分析后给出雷达点迹丢失率。同理,通过比较可给出雷达探测威力评估报告。
ADS-B系统数据链在发送位置信息时,并没有把实时时间信息包含在其中,ADS-B地面接收设备接收数据中的时间是接收设备接收到数据解算后打上的GPS时间戳,不是民航飞行的实时时间。精度数据分析往往是以雷达记录的绝对时间(该时间由雷达携带的定位设备提供)作为基准进行分析,据统计二者一般相差有几百毫秒左右。因此,ADS-B数据提供的民航位置参数和雷达录取的数据存在时空没有对准的问题,在数据分析时不能按照通常用时间为基准的方法分析,可通过对数十条航路数据进行分析,得出以某个飞行拐点作为基准点来对航迹进行对比分析,基本能够测量出雷达真实的距离、方位和仰角精度。具体试验时,将雷达各系统状态设置完好,并在雷达附近用ADS-B系统地面接收设备接收民航数据,同时雷达跟踪各条航路上的民航目标并记录数据。飞行结束后,以ADS-B设备记录的数据作为真值进行误差统计,记录多条航路,并分别对其进行误差对比分析。
相比于利用军用飞机作为合作目标检飞只能获取一部GPS数据的方法相比,利用ADS-B导航信息,理论上可以提供多个目标的GPS数据,然后求得校正后的平均量,就可以获得较好的校正效果。通过算法求出N条路线的校正值然后求得平均的校正值,来消除误差,从而达到校正的目的。另外,在实际操作中,由于ADS-B系统的定位位置是机载GPS天线相位中心,而雷达定位则是利用飞机的电磁波反射面,从原理上讲这两种方式的定位点是不同的,必然产生不可消除的系统误差。这个误差和飞机的大小有关,民航客机的体积一般都比较大,所以在实际数据的分析中适当考虑该因素的影响,消除该误差[6]。
2 硬件设计
基于ADS-B的雷达数据采集评估系统的硬件分成两大部分:ADS-B地面接收和解码部分、战术性能测试评估处理部分。其中,ADS-B地面接收和解码部分包含ADS-B天线、信号接收模块、报头检测模块、代码解析模块、数据处理模块、坐标转换模块等,战术性能测试评估处理部分由一台显控主机(评估软件运行载体)及其附件(包含GPS天线、电源等)组成,ADS-B地面接收和解码部分内嵌在显控主机内。系统实物图如图2所示。
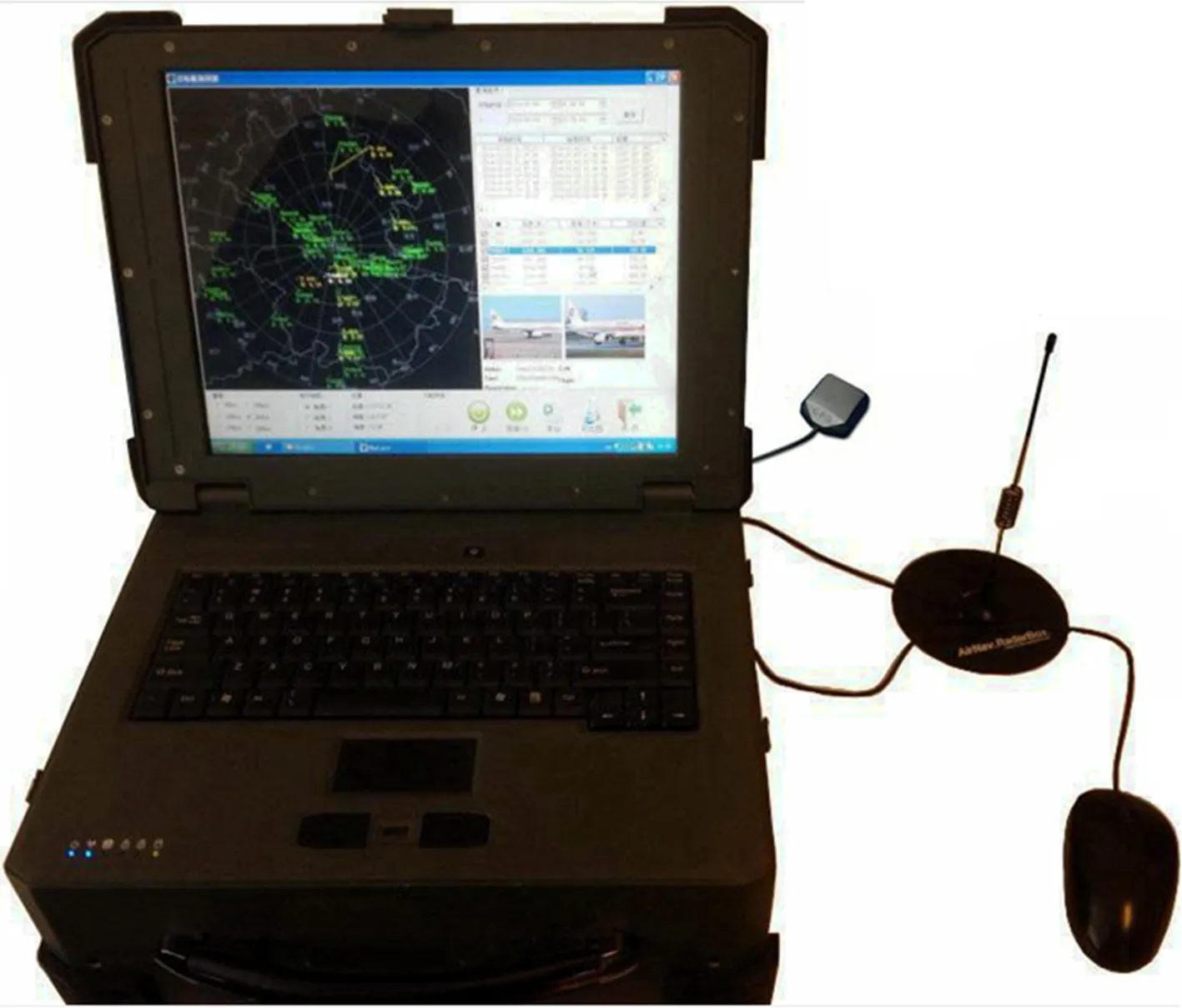
图2 系统实物图
ADS-B天线接收1 090 MHz空间电磁波信息,信号接收模块完成1 090 MHz调制信号到视频信号的解调工作;报头检测模块根据1 090 ES数据链格式,完成8 μs的前导脉冲框架检测;代码提取模块依据框架检测位置,确定后续112 bit的数据块,并完成对代码的提取、解析、装配;数据处理模块去除错误应答信息,提取正确应答信息,完成同一目标应答数据的凝聚、关联,保存有用的目标经纬度、高度等信息;坐标转换模块将标的WGS-84坐标数据转换为雷达坐标系下的坐标数据,便于与来自被试雷达的数据进行比对;显控主机运行雷达性能评估软件,完成雷达性能评估功能。
3 软件设计
雷达数据采集评估系统的软件主要实现ADS-B民航航班数据的接收,提取ADS-B编码信息,经解码后记录飞机的经纬度、高度等数据;同时接收雷达通过指定协议上报的航迹数据;通过数据分析和比对,将在时间、方位和距离上符合的ADS-B数据和雷达航迹数据进行配对;在比较足够多的配对目标数据后(配对目标ADS-B数据、配对目标雷达航迹数据),通过对目标误差进行累计统计,实现对雷达情报质量和雷达性能的评估。系统软件工作流程如图3所示。

图3 系统软件工作流程图
系统软件主要由系统配置、任务编缉、数据采集、情报协议解析、信息显示与记录、雷达性能评估、数据库管理等模块组成,如图4所示。系统配置模块主要包括站地坐标配置、真值表格式配置、通信方式配置、通信协议配置;任务编缉模块主要是输入当前任务的工作时间、地点、环境参数等;数据采集模块包括采集雷达上报的航迹数据、ADS-B接收的民航航班数据和GPS数据;情报协议解析模块的任务是根据协议类型对接收的雷达点航迹数据、ADS-B数据进行解码,解析出目标批号、距离、方位、高度等信息;信息显示与记录模块负责显示ADS-B信息、雷达点航迹信息,主要显示目标参数、人机交互等信息,并按照内部的格式进行记录,文件记录之后,可将记录的雷达数据文件进行重演,再现工作时的场景,便于开展数据分析;雷达性能评估模块负责分析接收到的数据,评估雷达情报质量和雷达性能,并以报表形式进行显示和输出;数据库管理模块主要管理包括系统接收的各种数据、雷达装备型号、通信协议和用户信息等。

图4 系统软件组成框图
对雷达情报评估的指标包括雷达精度评估、威力评估、航迹自动起始能力(自动起始时间和自动起始率)评估、航迹质量(跟踪精度、点迹丢失率)评估等。雷达精度评估包括单个目标的精度评估和雷达总体精度评估。雷达总体精度评估是分距离段、方位范围、高度层,统计雷达的方位、距离和高度精度。单个目标的精度评估,可通过人工干预的方式在显示界面上点击目标批次进行操作,即可显示该目标的距离、方位、高度的精度误差。雷达总体精度评估通过软件自动评估完成。系统提供两种不同方式评估雷达总体精度的评估结果供参考。方式1:考虑ADS-B数据和雷达航迹数据之间存在时空没有对准的问题,只有目标作切向飞行时,才进行距离精度评估,因为目标切向飞行时,距离精度对时间不敏感;同理,只有在目标径向飞行时,才进行方位精度评估,因为目标径向飞行时,方位精度对时间不敏感。方式2:不管目标是否是径向、切向,只要有配对的雷达航迹数据和ADS-B数据就实时进行精度评估。这两种方式各有优缺点:方式1的精度评估方法计算结果更精确,但是需要较长时间,因为目标并不是每时每刻都在切向或者径向飞行,可采集的数据较少;方式2的精度评估方法计算更快,只要有数据就可以实时计算精度,但是没有方式1精确。
雷达威力评估是通过累积比较ADS-B数据和雷达航迹数据,评估雷达探测目标的最远距离;航迹自动起始能力评估包括航迹自动起始时间评估、航迹自动起始率评估两方面内容,航迹自动起始时间评估是计算雷达录取的航迹起始时间与最早出现该目标的ADS-B信息的时间之差,航迹自动起始率评估是指在一段时间内雷达自动起始的新目标批次总数与该段时间内送来的ADS-B信息中包含的新目标批次总数之比;航迹质量评估包含跟踪精度评估和点迹丢失率评估,跟踪精度评估是指评估目标航迹跟踪过程中目标的ADS-B数据、雷达航迹数据各参数之间的误差,点迹丢失率评估是指目标航迹跟踪过程中该目标ADS-B数据出现次数和该目标雷达录取点迹个数之差与该目标ADS-B数据出现次数的比值。
4 应用验证
根据上述思路,成功进行了雷达数据采集评估系统的研制。系统使用时首先进行系统配置,包括站地坐标、通信方式等;然后进行任务编缉,输入当前任务的各个参数;编缉完成后开始采集数据,采集的雷达情报数据和ADS-B数据以电子地图的方式显示,雷达状态、干扰、抗干扰信息以数据表的形式显示,同时将采集到的所有数据存储在数据库中;数据采集完成后可进行相关计算,通过对数据进行统计分析,实现对雷达精度、雷达威力、航迹质量等雷达性能评估。系统界面如图5所示。
雷达精度分析包括高度均值方差分析、距离均值方差分析、方位均值方差分析以及离散率计算。系统列出当前所有待计算的目标,当单击某一目标,系统自动计算相关精度参数并显示,包括均值、方差、离散率。如图6所示,图中上部分表示某批目标的航迹数据序列,显示了整个航迹的变化过程,下部分表示航迹的相对误差值。当雷达目标无对应的ADS-B数据时只计算离散率,若要计算均值和方差则需要添加真值表。
雷达威力分析是计算当前时间段内雷达录取的所有目标的最大发现距离,如图7所示,左侧列表列出了当前所有待计算的目标和最大距离,单击某一目标,此时系统查询并显示相应的飞机航班信息,包括航空公司、航班号、飞机型号,同时右侧图表显示航迹数据序列,显示了整个航迹的变化过程。选中多批目标后,软件可根据目标实际发现的最大距离得出雷达的探测威力。

图5 系统界面
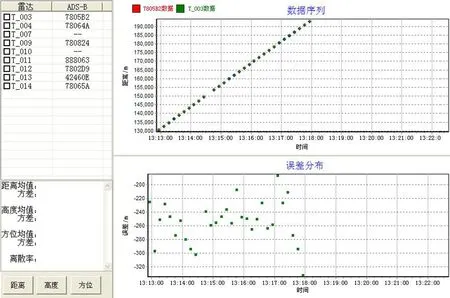
图6 目标精度分析

图7 雷达威力分析
5 结束语
本文介绍了一种基于ADS-B的雷达数据采集评估系统,该系统实时采集雷达的主要工作参数、状态参数及情报数据,再利用目标真实GPS数据或民航ADS-B广播数据等真值,对雷达性能(如雷达威力、雷达精度、航迹质量等)进行评估。经应用验证,该系统能够对ADS-B目标信息进行假目标抑制、相关、滤波等跟踪处理,形成ADS-B目标航迹信息;能够对采集到的ADS-B目标航迹信息数据和雷达数据进行分析、处理,实现雷达性能指标的评估与显示。
[1]李自俊. ADS-B广播式自动关监视原理及未来的发展和应用[J]. 中国民航飞行学院学报, 2008, 19(5):11-14.
[2]姚姣. ADS-B监视功能的性能研究和仿真[D]. 成都:电子科技大学, 2010.
[3]王伟玮,涂榫. 基于ADS-B和RTL-SDR的空中交通监
视系统[J]. 微型机与应用, 2016, 35(17):80-83.
[4]孟军,马彦恒,董建,等. 一种基于ADS-B的雷达跟踪精度计算方法[J]. 中国测试, 2013, 39(1):110-113.
[5]杨蓓蓓,张洪川. 一种基于ADS-B的雷达性能测试方法[J]. 雷达与对抗, 2015, 35(2):12-14.
[6]张涛,唐小明,金林. ADS-B用于高精度雷达标定的方法[J]. 航空学报, 2015, 36(12):3947-3956. ZHANG Tao, TANG Xiaoming, JIN Lin. A Method of High-Accuracy Radar Calibration with ADS-B [J]. Acta Aeronautica Et Astronautica Sinica, 2015, 36(12):3947-3956.(in Chinese)