教学用双足步行机器人步态规划及软硬件设计
2017-03-08高宇博邓佳玉魏庆媛赵英妤
张 蔓, 高宇博, 邓佳玉, 魏庆媛, 赵英妤
(哈尔滨石油学院,黑龙江 哈尔滨 150028)
研究与设计
教学用双足步行机器人步态规划及软硬件设计
张 蔓, 高宇博, 邓佳玉, 魏庆媛, 赵英妤
(哈尔滨石油学院,黑龙江 哈尔滨 150028)
阐述了教学用步行机器人的自由度选择及步态规划,分析了六自由度双足机器人行走规律,用CAXA软件画出自由度分部图,运用三点规划法确定了摆动腿踝关节、髋关节的3个步态姿态点,配合多项式插值法确定踝关节运动。选择32路舵机控制器为主控板,并给出直线行走程序。
教学;双足机器人;步态;规划
机器人是一种智能化机械装置,广泛应用在危险、繁重的工业现场。固定式机器人通常应用在产品流水线上,移动机器人则可应用在各种环境当中,用于勘察、搬运、星球探测等[1]。步行机器人在移动机器人中应用最广泛,其特点是适应各类地形地貌,具有行走速度快、能耗小、体积小等优点。双足机器人(又称仿人形机器人,类人机器人)是步行机器人的一种,和其他移动机器人相比,双足机器人在步行环境的适应性上具有巨大优势,可平地行走,也可以上下台阶,跨越障碍。目前步行机器人主要应用于康复医学、智能假肢等方面,由于其结构类似人类,赋予其丰富的传感器系统后则可代替人类去特殊的危险领域作业,如太空探测、海底探测、核污染现场作业等,因此研究双足机器人具有非常重要的意义。
1 双足机器人自由度选择
一般来说,双足机器人能实现的基本功能有直线行走,上下楼梯、转弯行走等,本文机器人需实现的只有直线行走功能。直线行走分为以下6个步骤:左腿抬起,重心右移;左腿落下,重心左移;右腿抬起,右腿落下。通常机器人双腿活动关节分为髋关节、膝关节、踝关节,实现直线行走单组动作只需髋关节的俯仰自由度和踝关节的俯仰自由度,连贯动作调试时还需踝关节的偏转自由度,以保持动作的连贯性。双足机器人自由度分配如图1所示,髋关节分配一个俯仰自由度,以Y轴为轴线旋转;膝关节没有自由度;踝关节分配一个俯仰自由度,围绕Y轴旋转;踝关节分配一个偏转自由度,以X轴为轴线旋转。每条腿3个自由度,由于机器人腿部设计成对称结构,所以双腿共6个自由度,建立的坐标系如图1所示。
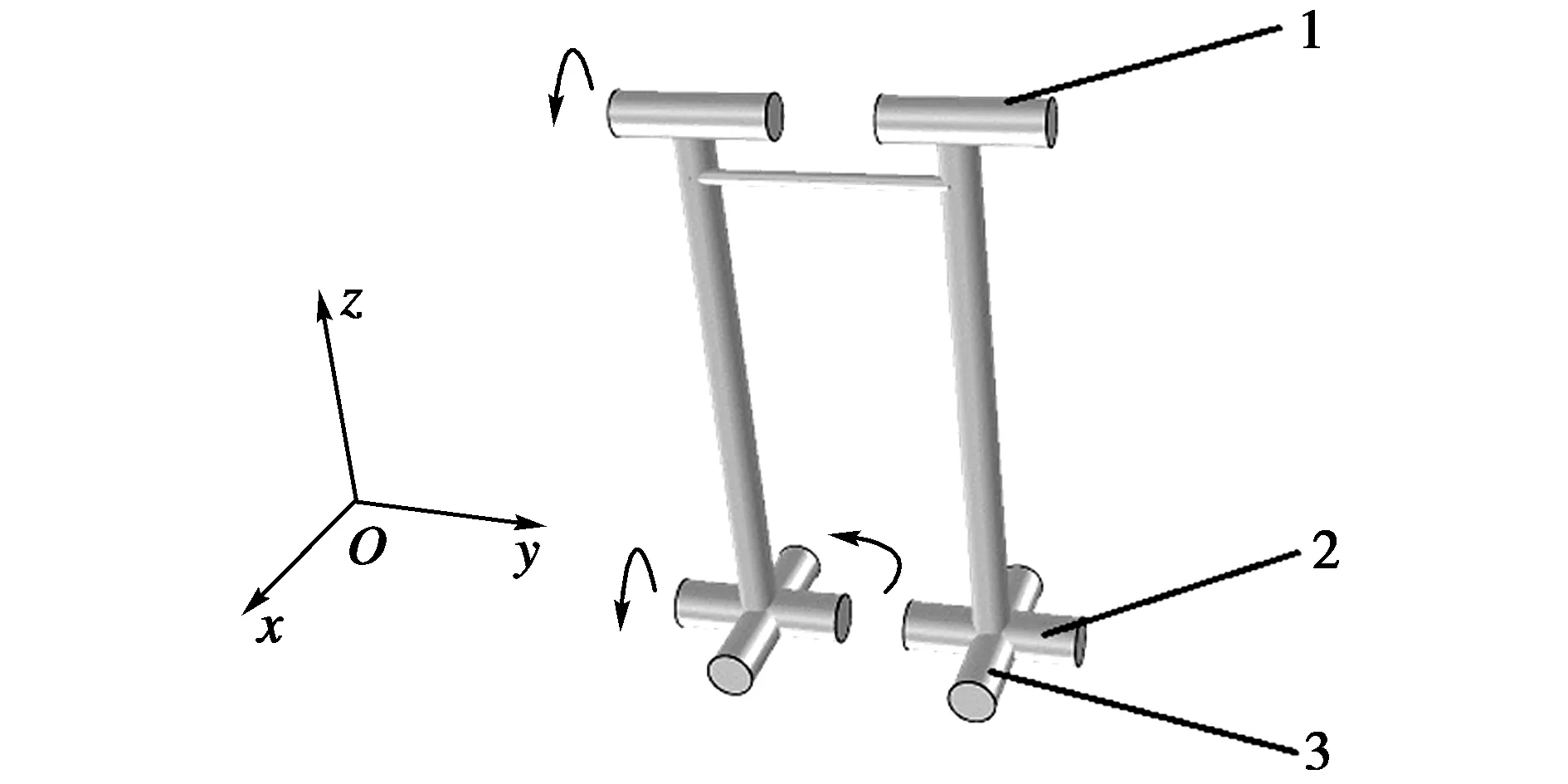
图1 双足机器人自由度分配1.髋关节俯仰自由度;2.踝关节俯仰自由度;3.踝关节偏转自由度
2 双足机器人步态规划
机器人运动过程中稳定行走状态分为静平衡和动平衡。 静态平衡的条件是机器人的重心始终保持在着地腿支撑区域;动态平衡的条件是机器人的重心保持在ZMP(零力矩)区域。机器人运动保持静态平衡状态一般速度较慢,而保持运动中的动态平衡状态则速度较快。本文讨论的是最基本的静平衡状态。
如何实现静态平衡取决于机器人的行走姿态和规律,也就是机器人的步态。步态是运动过程中步行者(人、动物或机器人)的肢体在时间和空间上的一种协调关系,根据人类行走的规律,确定双足机器人各关节角的函数,分析行走过程中各关节姿态的变化规律,使机器人的重心保持在支撑区域内。为了方便计算和分析,假设机器人两腿髋关节轴连线始终与地面平行,运动中脚底板一直保持和地面平行[2-4]。
机器人直线行走是一个具有周期性的单步行走,在步行周期里分单腿支撑状态和双腿支撑状态。采用三点分析法,选择同一关节在摆动腿离地时刻、腿抬到最高处时刻、腿落地时刻的坐标参数,计算出数值带入5次多项式中得到各个关节角的变化规律[5-6]。假设一个步行周期时间为TM,双足支撑时间为TR,单步距离为L′,踝关节抬腿最高处为H;假设左腿支撑,右腿摆动,以左腿踝关节在支撑面上竖直方向的投影为原点,则支撑腿踝关节坐标为(Xzh,Zzh),右腿一个步行周期开始的瞬间时刻右腿踝关节坐标为(-L′,HKS),右腿髋关节坐标为(-L′/2,HKG),右腿抬到最高点时刻右腿踝关节坐标为(XG,H),右腿髋关节坐标为(XK,HW),右腿落地时刻右腿踝关节坐标为(L′,HKS),右腿髋关节坐标为(L′/2,HKG)。实验测得的双足机器人数据见表1。
表1 双足机器人实验数据

质量/kg身高/cm步行周期TM/s双足支撑时间TR/s单步距离L′/cm踝关节抬腿最高处H/cm髋关节抬腿最高处HW/cm脚踝高HKS/cm髋关节高HW/cm092430369174515
摆动腿踝关节的运动函数式为:
a1+a2t+a3t2+a4t3+a5t4+a6t5
由已知条件可求出踝关节在双足支撑期间和单步周期内X轴的位移、速度和加速度的值,带入公式可得到摆动腿踝关节在X轴上的运动规律。同理,可求出摆动腿髋关节的运动规律。
3 双足机器人硬件选择及软件编程
双足机器人驱动器选用舵机,舵机采用闭环系统,利用接收的数字信号进行控制,具体体积小,性能稳定的特点。舵机有三根线,分别是电源线、地线、控制信号线。舵机通常由0.5 ~2.5 ms的PWM方波控制,其旋转角度为0~180°,驱动由32路伺服电机控制器实现,该控制器以ATMEL公司的Atmega16单片机为核心,采用双电源输入以避免信号干扰。
软件开发平台是伺服电机上位机软件,通过指令控制双足机器人直线行走。双足机器人直线行走程序如下:
T700 #0P1491#1P1507#2P1500#16P1502#17P1469#18P1456T700T700 #0P1200#1P1480#2P1500#16P1350#17P1520#18P1490T700
T700 #0P1380#1P1200#2P1200#16P1300#17P1520#18P1490T700
T800 #0P1329#1P1289#2P1225#16P1350#17P1020#18P1158T800
T800 #0P1599#1P1118#2P1111#16P1630#17P1250#18P1328T800
T700 #0P1638#1P1480#2P1500#16P1766#17P1230#18P1250T700
T700 #0P1660#1P1480#2P1500#16P1600#17P1800#18P1790T700
T700 #0P1611#1P1959#2P1794#16P1640#17P1763#18P1792T700
T700 #0P1348#1P1759#2P1564#16P1350#17P1900#18P1920T700
T700 #0P1280#1P1740#2P1710#16P1300#17P1520#18P1490T700
T800 #0P1380#1P1200#2P1200#16P1300#17P1520#18P1490T800
T800 #0P1329#1P1289#2P1225#16P1350#17P1020#18P1158T800
T800 #0P1599#1P1118#2P1111#16P1630#17P1250#18P1328T800
T700 #0P1638#1P1480#2P1500#16P1766#17P1230#18P1250T700
T700 #0P1660#1P1480#2P1500#16P1600#17P1800#18P1790T700
T700 #0P1611#1P1959#2P1794#16P1640#17P1763#18P1792T700
T700 #0P1348#1P1759#2P1564#16P1350#17P1900#18P1920T700
T700 #0P1280#1P1740#2P1710#16P1300#17P1520#18P1490T700
T700 #0P1491#1P1507#2P1500#16P1502#17P1469#18P1456T700
[1] 于欣龙译.爱上Arduino[M].北京:人民邮电出版社,2012.
[2] 张毅.移动机器人技术基础与制作[M].哈尔滨:哈尔滨工业大学出版社,2013.
[3] 朱硕迪.六自由度双足竞步机器人的结构设计及轨迹跟踪[D].哈尔滨:哈尔滨理工大学,2015.
[4] 王曙光.移动机器人原理与设计[M].北京:人民邮电出版社,2013.
[5] 孟浩,王妍玮.基于Arduino的双足仿人机器人设计[J].林业机械与木工设备,2014,41(2):38-40.
[6] 辛颖,薛伟,杨铁滨,等.慧鱼创意组合模型在机器人技术实验教学中的实践与应用[J].森林工程,2012,28(1):81-83+86.
(责任编辑 张雅芳)
Teaching-type Bipedal Walking Robot Gait Planningand Software and Hardware Design
ZHANG Man, GAO Yu-bo, DENG Jia-yu, WEI Qing-yuan, ZHAO Ying-yu
(Harbin Institute of Petroleum,Harbin Heilongjiang 150028,China)
The freedom degree choice and gait planning of teaching-type bipedal walking robots are stated,the walking pattern of six DOF biped robots is analyzed,CAXA software is used to draw the segment graph of the degree of freedom,a three-point planning method is used to determine the three gait posture points of the swinging leg ankle joints and hip joints,and a polynomial interpolation method is adopted to determine the movement of ankle joints.A 32-way steering servo controller is used as the main control board and straight line walking procedures are given.
teaching;biped robot;gait;planning
2016-12-05
“单片机原理及应用”课程教学改革项目:哈尔滨石油学院课程改革与建设项目;黑龙江省高等教育学会“十三五”高等教育科研课题(规划课题)项目“机电类专业本科创新教育体系研究与实践”(16G446)
张 蔓(1975-),女,黑龙江哈尔滨人,哈尔滨石油学院机械工程学院讲师,硕士,主要从事机电创新设计教学及研究工作,E-mail:zhangman25873@qq.com。
TP242
A
2095-2953(2017)03-0038-02