基于3D结构激光的木材表面缺陷检测的研究
2017-03-08姚建平杨建华
姚建平, 肖 江*, 闫 磊, 杨建华,2
(1.北京林业大学工学院,北京 100083;2.国家林业局北京林业机械研究所,北京 100029)
研究与设计
基于3D结构激光的木材表面缺陷检测的研究
姚建平1, 肖 江1*, 闫 磊1, 杨建华1,2
(1.北京林业大学工学院,北京 100083;2.国家林业局北京林业机械研究所,北京 100029)
木材表面缺陷直接影响木材品质及其使用价值,表面缺陷的检测对于木材的科学利用具有十分重要的意义。目前大多数的木材表面缺陷检测都是对二维可见光图像进行处理得到缺陷相关的特征参数,本研究设计了基于3D结构激光的木材表面缺陷图像采集和识别系统,该系统可以采集到木材表面缺陷的灰度图和高度图,再采用HALCON软件对其进行处理以提取木材表面缺陷的特征值。实验结果表明,该系统可以快速准确地检测识别出木材表面的节疤、虫眼、凹痕等缺陷,具有非接触、高精度的优点。
木材表面缺陷;3D结构激光;HALCON;检测
我国是一个森林资源相对匮乏的国家,面对我国森林资源不足、森林质量不高的现状,如何充分利用森林资源、提高木材利用率,是我国林业科技人员迫切需要解决的重要课题。木材缺陷的类型、尺寸、位置、形状等特征直接影响木材产品的强度、外观及档次,木材表面缺陷的检测对木材加工过程中的木材材质评定、质量控制和产品分等均具有重要意义,检测并剔除木材表面缺陷是木制品加工过程中的重要环节[1]。
木材表面缺陷是指降低木材商品价值和使用价值的各种非正常和不规则的部分[2]。木材表面缺陷类型很多,形状复杂,传统的木材表面缺陷检测主要由人工完成,存在劳动强度大、效率低、准确率低等问题[3-4]。随着木材加工业向机械化、自动化的大规模生产方向发展,人们对木材的加工质量,尤其是表面缺陷更加重视[5]。利用机器视觉和图像处理技术,快速、准确地检测木材表面缺陷可以有效地提高木材加工行业的自动化程度。
机器视觉技术就是利用机器代替人眼来做测量和判断,而在机器视觉近二十年的发展过程中,受图像摄取技术及数据处理技术的限制,机器视觉系统普遍基于二维视觉技术[6]。目前机器视觉主流的检测手段还是依赖2D相机,即从灰度图中提取被测物特征,然后在X-Y平面内进行测量。当遇到需要测量高度或需要Z方向信息,如需要高度、深度、厚度、平面度、体积、磨损等检测时,2D视觉则不能满足要求。近年来,随着三维图像摄取技术和数据处理技术的飞速发展,3D视觉技术成为了计算机视觉领域的发展焦点[7]。3D结构激光扫描测量技术作为非接触式测量方式之一,能够全自动高精度地直接对目标物体进行激光扫描,直接获取被测物体的深度信息,增加的第三维数据不但能够获取更多的被测物体信息,还可以降低数据偏差,提高测量精度和准确度及工作效率[8]。因此,本研究设计了一套基于3D结构激光的木材表面缺陷图像采集和识别系统,利用专业的机器视觉软件HALCON对其采集到的高度图和灰度图进行处理,最终识别出木材表面的节疤、虫眼及凹痕缺陷。
1 系统搭建
系统主要由Gocator 3D智能传感器、平移运动实验平台DH-POL-PY300、Gocator数据传输线和I/O线、转换器HF150W-S-48及上位机组成,系统实物图如图1所示。
Gocator 3D智能传感器由加拿大LMI公司生产,其为集激光发射器和相机成像测量装置为一体的智能激光传感器。Gocator非常适合被集成在生产设备上进行材料检测或用于改善生产过程质量控制的速度,是各种非接触式在线检测应用的理想选择。

图1 系统实物图
Gocator 3D智能传感器具有性能稳定、测量精度高、维护简便等特点,可广泛应用于工业自动化、汽车制造、轮胎检测、道路检测、金属冶炼等各个领域[9]。本系统采用的型号为Gocator 2330,该传感器外观图如图2(a)所示,整体结构如图2(b)所示。Laser Emitter发射结构光用于激光成型,Camera用于观测从目标表面反射出的激光,I/O connector接受输入和输出数字信号,Power/LAN Connector接通电源和激光安全信号并连接到千兆以太网。另外,Gocator还包括电源状态指示灯、Camera测量状态指示灯和激光状态指示灯。Gocator 2330性能参数见表1。

图2 Gocator 2330智能传感器
传感器可以连接到各种输入和输出设备上,如通过Master连接电脑,Master可为激光传感器提供电源和数据I/O的单点接入。激光传感器提供两种应用接口,本研究采用Web界面,用户可以根据需要进行各种参数设置,同时还提供了开发工具包,可以根据需要定制个性化解决方案,Web界面的所有参数都可以通过函数接口实现。传感器通过IP在局域网中寻址找到对应的传感器进行各项设置及数据的获取。Gocator既能够静止采集一条激光线的高度数据,也能够运动采集一个平面的高度数据。X方向(激光线方向)以及Z方向(高度方向)上的间隔在出厂时就已经校准好,Y方向(运动采集方向)则需要设置对应的毫米距离。运动采集的方式有两种:
表1 Gocator 2330性能参数

扫描速度170~5000Hz接口千兆以太网输入差分编码器,激光安全控制,外触发输出2∗数字输出,RS-485串口(115K),1∗模拟输出(4~20mA)输入电压+24~+48VDC(13W),波动范围:±10%每条剖面轮廓所包含数据点数1280Z方向线性度/%ofMR001Z方向分辨率/mm0006~0014X方向分辨率/mm0044~0075净距离CD/mm90测量范围MR/mm80视场FOV/mm47~85设备尺寸/mm49×75×142工作温度/℃0~50
一种是时间运动采集,即间隔固定的时间采集;另一种是编码器运动采集,即通过脉冲触发采集。时间运动采集无需编码器,但需要物体匀速稳定运动,否则Y向间隔不能和实际距离相对应。编码器脉冲采集需要接入A、B两相触发,按照每个脉冲的上升沿进行触发,在最高采集频率内不受运动速度的影响,并且能分辨物体的运动方向。传感器的Web应用界面如图3所示。
本系统采用的实验平台是平移运动实验平台DH-POL-PY300,该平台适用于线阵摄像机拍照实验,并提供有旋转编码器。Gocator可通过平移台编码器进行触发采集图像。平移实验平台的相关参数见表2。
表2 平移实验平台相关参数

项目参数平移实验台面尺寸/mm600×400×200方形托盘尺寸/mm300×250支架高度/mm700平台材料金属运动方式往复运动运动速度/mm·s-10~200重复运动精度/mm±01跳动/mm±01触发传感器内置旋转编码器(2000脉冲/r)中心最大负载/kg10工作温度/℃-5~60
实验选择的是编码器运动采集模式,当实验台中的电机开始带动平移台往复运动时,编码器发出与运动同步的触发信号,该信号输入到Gocator中后,Gocator发射出线激光并开始采集图像,由此保证了采集到的图像不会因为速度变化而发生变形。完成Gocator的安装和接线后,进行编码器和平台校准,然后在Web应用界面上设置好曝光值、采集间距、有效区域等各类相关参数后,即可以开始进行图像的采集。
2 图像采集
为了实现图像的在线实时采集与处理,采用了Halcon作为系统软件的核心处理模块。Halcon是德国MVTec公司开发的一套完善的标准机器视觉算法包,拥有应用广泛的机器视觉集成开发环境。其能节约产品的成本,缩短软件的开发周期,在欧洲及日本的工业界是公认的具有最佳效能的Machine Vision软件,是一套Image Processing Library(图像处理库),并且由多个各自独立的算子以及底层的数据管理核心构成[10]。Halcon提供有开放的软件接口,可以与Visual C++、Visual Basic等开发工具相结合进行以图形图像处理为主应用程序的开发。作为目前业内功能最完善、效率最高的软件之一,Halcon已被广泛应用于工业生产中的各个方面,如机械加工、电子器件、包装加工、木材加工等领域。HDevelop是Halcon高度交互式的编程环境,其工作界面如图4所示。

图4 HDevelop工作界面
Gocator提供GenTL驱动程序,允许GenTL兼容的第三方软件(比如Halcon)从Gocator的表面模式下实时地采集和处理3D点云数据和灰度数据。驱动安装和Halcon采集参数设置完成后就可以进行图像的采集,实验中设置的采集模式为异步循环采集式。连接相机并采集图像的语句为:
open_framegrabber(’GenICamTL’,0,0,0,0,0,0,’progressive’,16,’rgb’,-1,’false’,’default’,’192.168.1.10’,0,-1,AcqHandle)
grab_image_start(AcqHandle,-1)
grab_image_async(Image,AcqHandle,-1)
其中,GenICamTL表示设备名称,rgb表示图像为彩色图像,192.168.1.10表示相机的IP地址。对于已经采集到并保存下来的图像,也可以直接通过read_image算子读取。
Gocator的测量范围为47~85 mm,制作的实验样本为尺寸8 cm×6 cm×1 cm(长×宽×厚)的榆木锯材。实验共采集无缺陷图片40张、节疤图片50张、虫眼图片48张、凹痕图片45张,图5所示为其中有代表性的四张图片。
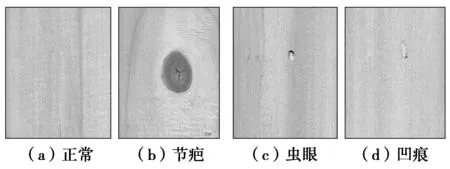
图5 四张有代表性的图片
3 图像处理与特征提取
Gocator采集的图片为16位的RGB图,图像的高度信息、灰度信息和参数信息分别保存在R、G、B三个通道中。先通过算子read_image读取图像,然后运用算子Go2GenTL_ParseData(Image,HeightMap,Intensity,frameCount,timestamp,encoderPosition,encoderIndex,inputs,xOffset,xResolution,yOffset,yResolution,zOffset,zResolution,width,height,hasIntensity)进行图像拆分,得到高度图和灰度图。各参数所代表的意义如下:Image为图像,HeightMap为高度图,Intensity为灰度图,frameCount为帧计数,timestamp为时间标志,encoderPosition为编码器位置,encoderIndex为编码器序列,inputs为输入,xOffset为X方向偏移,xResolution为X方向分辨率,yOffset为Y方向偏移,yResolution为Y方向分辨率,zOffset为Z方向偏移,zResolution为Z方向分辨率,width为图像宽,height为图像高,hasIntensity为是否有灰度值。
对四张有代表性的图片进行拆分后得到的高度图和灰度图如图6所示,每组图中左边为高度图,右边为灰度图,高度图中的像素值代表该像素点的高度值,灰度图中的像素值代表该像素点的灰度值。利用算子Texture3D_display可以实现木材图像表面3D灰度纹理的显示,如图7所示。

图6 图像拆分

图7 3D灰度纹理
利用拆分得到的高度图和灰度图对缺陷图像进行处理。针对节疤的处理流程如图8所示,针对虫眼凹痕的处理流程如图9所示。

图8 节疤处理流程

图9 虫眼凹痕处理流程图
图像处理后的结果如图10所示,图中缺陷部分的边缘用线条拟合表示,从效果图看缺陷边缘的拟合效果良好。
木材表面缺陷特征的类型选择和缺陷特征量的提取是建立木材表面缺陷识别系统的关键。提取出木材缺陷区域后可以获得缺陷区域的相关参数。本研究提取的缺陷区域特征量包括灰度均值、灰度方差、偏心度、圆度、紧密度五种,这五种特征可以作为后续缺陷分类识别的特征输入量。
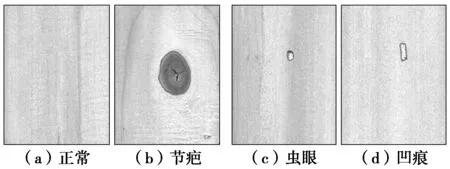
图10 缺陷处理效果
(1)灰度均值:
(1)
(2)灰度方差:
(2)
式中:Mean为缺陷图像灰度均值;Deviation为缺陷灰度方差;g(p)为缺陷像素点灰度值;R为缺陷区域;F为缺陷区域像素个数。
(3)偏心度:
(3)
式中:Ra为缺陷区域等效椭圆长半轴长;Rb为缺陷区域等效椭圆短半轴长。
(4)圆度:
(4)
式中:R为缺陷区域面积;max为缺陷区域外接圆半径。
(5)紧密度:
(5)
式中:L为缺陷区域周长;R为缺陷区域面积。
除了上述五种特征外,还能获取到缺陷区域的面积和中心坐标以及缺陷的深度。其中,缺陷区域面积反映的是缺陷的大小,中心坐标反映的是缺陷的位置,缺陷的深度反映的是缺陷的深度信息。由于图像的X方向分辨率和Y方向分辨率是已知的,缺陷区域的真实面积可以通过缺陷区域像素面积乘以X方向分辨率乘以Y方向分辨率求出。针对上述缺陷图片获取到的特征信息见表3,正常样本的特征值均为0。
在采集到足够多的样本数量和提取到相应的缺陷特征值以后,就可以利用模式识别的方法对木材表面缺陷进行分类识别。常用的分类识别算法有支持向量机(SVM)、K近邻分类器、BP神经网络分类器等。
表3 缺陷特征值

面积/mm2中心坐标横坐标纵坐标灰度均值灰度方差偏心度圆度紧密度深度/cm节疤334978735791663021123483223501362067811760虫眼161605554829640265184877838101414063412022760凹痕414314738989724791225555641003828028420591302
4 小结
搭建了基于3D结构激光扫描技术的木材表面缺陷图像采集和识别系统,采用专业的机器视觉处理软件HALCON对采集到的图像进行处理,设计了缺陷图像处理算法流程图,并提取了相应的缺陷特征值。从缺陷处理的效果图看,综合了高度值和灰度值的缺陷边缘拟合效果良好,表明该系统用于木材表面缺陷检测具有可行性,而且具有检测精度高的优点。
[1] 尹建新,楼雄伟,黄美丽.灰度直方图在木材表面缺陷检测中的应用[J].浙江林学院学报,2008,25(3):272-276.
[2] 石岭,王克奇.板材表面缺陷检测技术研究[J].林业机械与木工设备,2005,33(3):40-42.
[3] 张召,业宁,业巧林.基于纹理提取和SVM技术的自动木材缺陷识别[J].浙江林学院学报,2009,45(23):219-223.
[4] 马大国,马岩.基于Gabor特征的木材表面缺陷的分块检测[J].东北林业大学学报,2013,41(10):118-121.
[5] 戴天虹,池成全,韩雪莹.基于数字图像处理及DSP的木质板材缺陷图像处理系统[J].机电产品开发与创新,2011,24(4):77-78+62.
[6] 杨建华,张伟,李丽.基于机器视觉的锯材表面缺陷检测系统设计[J].林产工业,2013,40(1):21-24.
[7] 莫圣阳.基于3D视觉技术的受电弓磨耗检测系统研究[D].广州:广东工业大学,2015:4-9.
[8] 吴庆华.基于线结构光扫描的三维表面缺陷在线检测的理论与应用研究[D].武汉:华中科技大学,2013:3-9.
[9] 徐清霞.基于几何特征的钢轨磨耗检测[D].上海:上海工程技术大学,2015:45-47.
[10] 马继东,李淑红,朱玉杰.基于HALCON的树木检测方法应用研究[J].森林工程,2015,31(3):57-59.
(责任编辑 张雅芳)
Study on Detection of Wood Surface Defects Based on 3D Structure Laser
YAO Jian-ping1, XIAO Jiang1*, YAN Lei1, YANG Jian-hua2
(1.School of Technology,Beijing Forestry University,Beijing 100083,China; 2.Beijing Forestry Machinery Research Institute of the State Forestry Administration,Beijing 100029,China.)
Wood surface defects directly affect the quality of wood and its value in use,and wood surface defect detection is of great significance for the scientific utilization of wood.At present,most of the wood surface defect detection is based on the 2D visible image processing to obtain the defect-related feature parameters.In this paper,an image acquisition and recognition system of wood surface defects based on 3D structure laser is designed.The system can capture the gray scale and height map of wood surface defects,and the HALCON software is used to deal with it to extract the characteristic value of wood surface defects.The experimental results show that the system can detect and identify the wood surface defects like knots,wormholes and dents quickly and accurately,which has the advantages of non-contact and high precision.
wood surface defects;3D structure laser;HALCON;detection
2017-01-09
中央级公益性科研院所基本科研业务费专项资金项目“基于机器视觉的单板外观质量在线检测系统研究”(CAFINT2015C14)
姚建平(1991-),男,硕士研究生,主要研究方向为机器视觉与图像处理,E-mail:yjp2495637@126.com。
*通讯作者:肖 江(1956-),女,教授,博士生导师,博士,主要研究方向为木材无损检测技术,E-mail:xiaojiang56@126.com。
TS642
A
2095-2953(2017)03-0020-06