基于实测渣土输出流量反馈的双闭环盾构土压平衡控制探索
2017-03-07邵成猛
邵成猛
(中国铁建十六局集团有限公司,100018,北京∥高级工程师)
基于实测渣土输出流量反馈的双闭环盾构土压平衡控制探索
邵成猛
(中国铁建十六局集团有限公司,100018,北京∥高级工程师)
现有的盾构土压平衡控制系统中,通常通过控制螺旋输送机的转速改变渣土输出流量实现对密封舱压力的控制。为克服螺旋输送机理论计算渣土流量与实际输出流量存在的偏差对密封舱压力精确控制产生的影响,在现有盾构土压平衡控制系统的基础上,在输送渣土的皮带机上安装皮带秤,以准确实时测得螺旋输送机的瞬时渣土输出流量作为反馈信号构成螺旋输送机转速的控制闭环,并与密封舱压力的反馈信号构成盾构土压平衡双闭环控制系统。通过仿真分析和现场试验验证了所建立控制系统的有效性。
盾构掘进机; 土压平衡控制; 密封舱压力; 渣土输出流量反馈
Author′s address China Railway 16th Bureau Group Co.,Ltd.,100018,Beijing,China
土压平衡盾构是盾构掘进机的一种,在其工作过程中会引起土体扰动,从而改变地层的应力状态,进而造成地表变形,当变形过大时会引发地表开裂、地面建筑物倾斜等施工事故。目前,控制盾构工作过程中地表变形的基本方法是保证其密封舱土压平衡[1-2]。
为了实现盾构密封舱压力的快速精确控制,许多学者对相应的控制理论及方法进行了研究。文献[3]解释了盾构土压平衡的实现过程,提出了两种土压平衡控制方法。文献[4]基于PID(比例积分微分)控制器提出了密封舱压力的控制方法。文献[5]考虑盾构与土体的耦合作用建立了密封舱压力的控制机理模型,并提出了优化控制算法。文献[6]考虑推进速度波动的影响提出了一种土压平衡复合控制方法。现有的盾构土压平衡控制方法中,通常都是通过控制螺旋输送机的转速改变渣土输出流量实现密封舱压力的控制,但由于螺旋输送机不一定时刻处于“满载”状态,只通过其转速不能精确得到渣土的输出流量,这对密封舱压力的精确控制会产生一定影响。
为克服螺旋输送机理论计算渣土流量与实际输出流量存在的偏差对密封舱压力精确控制产生的影响,在现有盾构土压平衡控制系统的基础上,在输送渣土的皮带机上安装皮带秤,以准确实时测得的螺旋输送机的瞬时渣土输出流量作为反馈信号构成旋输送机转速的控制闭环,并与密封舱压力的反馈信号构成盾构土压平衡双闭环控制系统。为验证所建立控制系统的有效性,进行了仿真分析和现场试验研究。
1 密封舱土压平衡原理
土压平衡式盾构掘进机主要由盾体、刀盘、螺旋输送机、推进装置等构成。盾构掘进机前部的密封挡板与刀盘、切口环以及螺旋输送机形成密封舱。在工作过程中,推进液压缸驱动盾构掘进机向前推进,刀盘切削下的渣土填充密封舱和螺旋输送机壳体内的空间,形成的土压来平衡开挖面土层的水土压力,以保持开挖面土层的稳定,防止地表变形,渣土通过螺旋输送机排出盾体。盾构掘进过程中,需要使密封舱内的土压和开挖面的水土压力保持动态平衡。如果密封舱内的土压大于开挖面的水土压力,地表将发生隆起;反之,如果密封舱内的土压小于开挖面的水土压力,地表将发生沉陷[3]。为实现土压平衡,可通过实时调节螺旋输送机的转速或调节液压缸的推力,使盾构排土量和开挖量保持或接近平衡。
根据文献[6]中的描述,将密封舱看作一个封闭容器,进入该容器的渣土流量取决于盾构的推进速度,而排出容器的渣土流量取决于螺旋输送机的结构参数和转速,密封舱的渣土流量连续性方程为:
(1)
式中:
qi——密封舱渣土的输入流量;
qo——密封舱渣土的输出流量;
Cepm——密封舱的泄漏系数;
pe——密封舱土压力;
po——外界压力(包括盾体前方的土压力和水压力);
Ve——密封舱容积;
βe——渣土的体积弹性模量;
D——盾构外径;
v——盾构推进速度;
ηs——螺旋输送机排土效率;
d1——螺旋输送机叶片直径;
d2——螺旋轴半径;
Ts——螺旋输送机叶片螺距;
nm——螺旋输送机驱动液压马达转速;
ig——螺旋输送机减速机减速比。
忽略密封舱泄漏渣土的体积,可得到盾构密封舱土压力变化差值为:
(2)
在盾构掘进过程中,土压传感器实时测量密封舱内的土压,并与给定的土压值进行比较,以调整盾构的推力或螺旋输送机的转速,完成密封舱压力的闭环控制,实现土压平衡。盾构的推进液压缸上装有位移传感器,对所测得的位移信号进行差分后反馈到主控制器,实现对盾构推进速度的闭环控制。螺旋输送机上装有转速传感器,可实时测得螺旋输送机的转速。由于螺旋输送机不一定时刻处于“满载”状态,只通过其转速不能精确得到渣土的输出流量,为实时测量螺旋输送机输出渣土的流量,在输送渣土的皮带机上安装了皮带秤。皮带秤是采用杠杆原理设计的,在皮带机的皮带下面安装杠杆装置,皮带上面的物料通过杠杆装置的承载面时,会对承载面产生一定的压力,杠杆装置将该压力传送到称重传感器,结合皮带机的实时速度,即可得到皮带机上渣土的瞬时流量,从而得到螺旋输送机输出渣土的瞬时流量。通过对螺旋输送机输出渣土流量的实时测量,完成对螺旋输送机转速的闭环控制。盾构土压平衡控制原理如图1所示。

图1 盾构土压平衡控制原理图
2 双闭环盾构土压平衡控制系统设计
实际盾构的推进速度是根据土层条件确定的,并受到盾构姿态调整等要求的影响,因此,盾构推进速度的调整不能仅依据土压平衡的要求。通常采用控制螺旋输送机的转速来实现土压平衡控制。根据文献[6],设计了一种采用速度反馈的螺旋输送机电液控制系统,得螺旋输送机的速度控制方程nm=Nm(i,TL,ps,pa)(其中i为比例电磁铁输入控制电流,TL为螺旋输送机负载扭矩,ps为控制系统供油压力,pa为变量泵壳体压力)。
根据式(2),可得到图2所示密封舱土压平衡控制系统的方框图。图中,is为螺旋输送机变量泵起点控制电流,Gbf为反馈系数。

图2 密封舱土压平衡控制系统结构图
3 仿真分析与试验研究
为验证所提出的基于渣土实测输出流量反馈的双闭环盾构土压平衡控制系统的有效性,进行了仿真分析,并进行现场试验研究。对于螺旋输送机速度控制环节,进行由0到20 r/min阶跃响应信号的跟踪仿真;对于盾构密封舱土压平衡控制系统,进行由0到20 kPa阶跃响应信号的跟踪仿真。仿真结果分别如图3和图4所示。
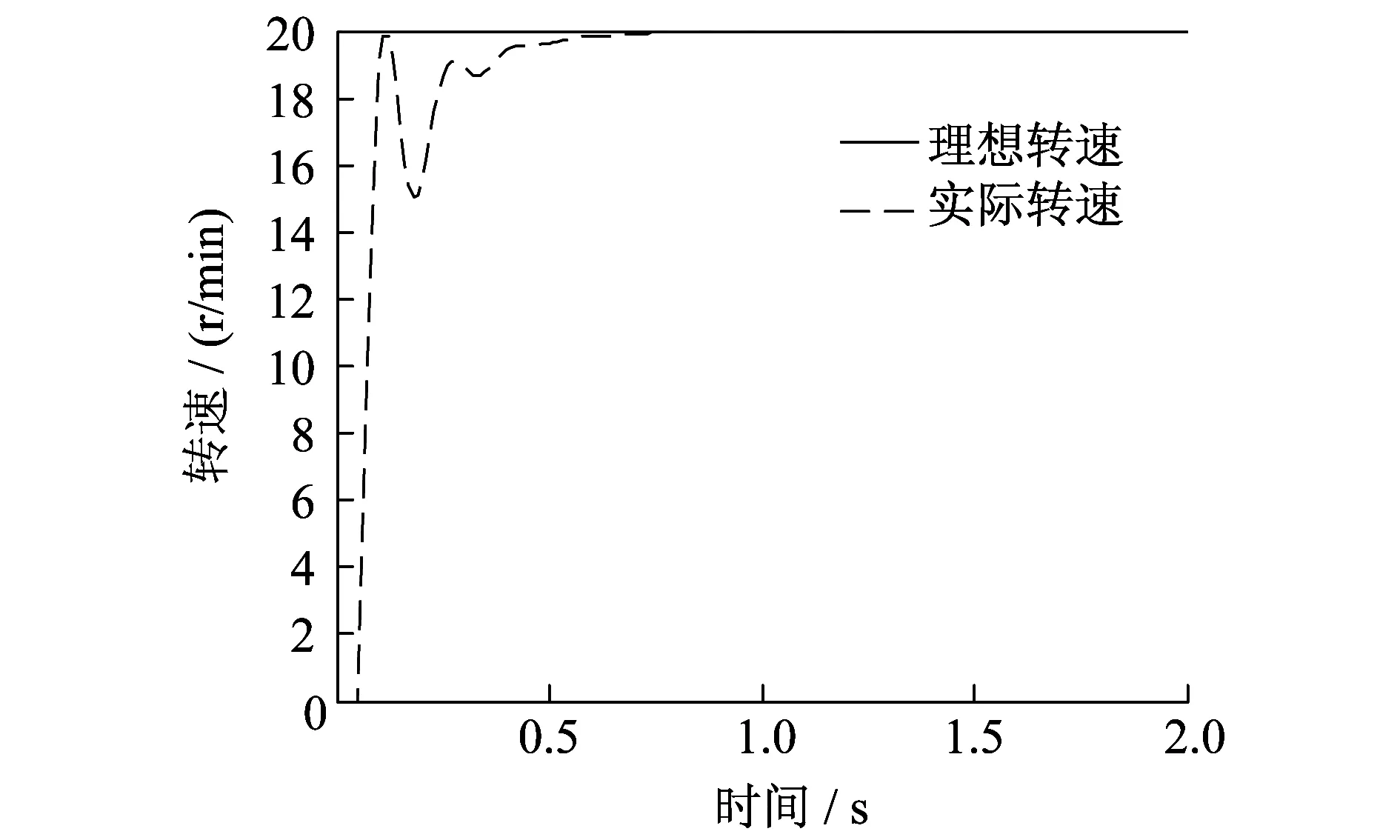
图3 螺旋输送机速度控制阶跃响应

图4 密封舱压力控制阶跃响应
由图3和图4可以看出,对螺旋输送机速度控制环节和盾构密封舱土压平衡控制系统进行阶跃响应测试时,虽然都会产生一定的波动,但经过一定时间都能达到稳定状态;螺旋输送机速度控制环节的阶跃响应时间约为0.55 s,盾构密封舱土压平衡控制系统的阶跃响应时间约为2.23s。
对所提出的土压平衡控制系统进行现场试验测试。该盾构机的直径为6.41 m,推进速度为5 cm/min,所在工作土层的土密度为1.9 t/m3,设定密封舱理想土压为200 kPa。将本土压平衡控制系统的试验结果与普通土压平衡控制系统的结果进行对比分析,如图5所示。

图5 盾构密封舱土压控制误差
从图5可以看出,采用基于渣土实测输出流量反馈的双闭环盾构土压平衡控制系统时,盾构密封舱土压控制的最大误差为0.805 kPa;采用普通土压平衡控制系统时,盾构密封舱土压控制的最大误差为1.07 kPa。相对于普通控制系统,本文所提出的土压平衡控制系统的控制误差有了较大程度的减小,验证了该方法的有效性。
4 结语
为克服螺旋输送机理论计算渣土流量与实际输出流量存在的偏差对密封舱压力精确控制产生的影响,对现有盾构土压平衡控制系统进行了改进,在输送渣土的皮带机上安装皮带秤,以准确实时测得螺旋输送机的瞬时渣土输出量,并提出了基于渣土实测输出流量反馈的双闭环盾构土压平衡控制。
对该盾构土压平衡控制系统进行了仿真分析和试验研究。对于螺旋输送机速度控制环节,其阶跃响应时间约为0.55s,对于盾构密封舱土压平衡控制系统,其阶跃响应时间约为2.23s。在现场试验研究中,将所提出的土压平衡控制系统的试验结果与普通土压平衡控制系统的结果进行对比分析,验证了所提出方法的有效性。在此基础上,将对本盾构土压平衡控制系统进行现场试验,进一步优化方案,以实际解决土压平衡盾构施工出土量控制难的问题,从根本上减小盾构施工引起的地层损失率。
[1] SUCHATVEE S,HERBERT H E.Artificial neural networks for predicting the maximum surface settlement caused by EPB shield tunneling [J].Tunnelling and Underground Space Technology,2006(21):133-150.
[2] 张冬梅,黄宏伟,王箭明.盾构推进引起地面沉降的粘弹性分析[J].岩土力学,2001,22(3):311-314.
[3] 胡国良,龚国芳,杨华勇.盾构掘进机土压平衡的实现[J].浙江大学学报(工学版),2006,40(5):874-877.
[4] YANG Huayong,SHI Hu,GING Guofang.Earth pressure balance control for EPB shield [J].Sci China Ser E-Tech Sci,2009,52(10):2840-2848.
[5] 上官子昌,李守巨,孙伟.土压平衡盾构机密封舱土压力控制方法[J].煤炭学报,2010,35(3):402-405.
[6] 王林涛,龚国芳,杨华勇,等.基于前馈-反馈复合控制的盾构土压平衡控制[J].中南大学学报(自然科学版),2013,44(7):2726-2735.
Earth Pressure Balance Control Based of Double Closed Loop Shield Tunneling Machine on the Feedback of Output Flow Muck
SHAO Chengmeng
In the existing earth pressure balance control system, the pressure control of capsule is commonly achieved by changing the revolving speed of screw conveyer. To overcome the negative influences of the offset between theoretical calculation of sediment flow and actual output flow of screw conveyer on the precision pressure control of capsule, the existing earth pressure balance control system is improve by installing a belt weigher on belt conveyer to achieve real-time measurement of the muck output flow of screw conveyer. The feedback of muck output flow and the capsule pressure feedback signal constitute a double closed loop control of the earth pressure balance control system. Simulations and field tests have verified the effectiveness of the proposed method.
shield tunneling machine; earth pressure balance control; earth pressure in capsule; feedback of muck output flow
U 455.43
10.16037/j.1007-869x.2017.01.013
2015-04-13)
