基于FPGA的宽频带水声定位信标信号发射系统设计研究
2017-03-03张国龙王小宁
张国龙 王小宁
(91388部队93分队 湛江 524022)
基于FPGA的宽频带水声定位信标信号发射系统设计研究
张国龙 王小宁
(91388部队93分队 湛江 524022)
为了克服水声定位系统中信标信号与水声设备工作频段重叠,提高水声定位系统的定位精度与信标信号的检测速度,论文设计完成了一种基于FPGA的宽频带水声定位信标信号发射系统。系统在单片机控制下以FPGA嵌入式系统为运算核心配合D/A电路等模块发射特定水声定位信标信号。将该系统加装于某型水下目标模拟器中与某型水声定位基阵在南海某海域进行海上试验,试验表明该信标信号发射系统功能完整,达到了预先设计目标,信标信号接收基阵能对接收的定位信标进行准确、实时的检测识别,通过试验表明采用该系统后具有较高时延估计精度。
信标信号; FPGA; 水声定位
Class Number TN91
1 引言
同步水声定位作为一种应用成熟、简单、有效的系统被普遍采用。同步水声定位系统是一种要求在被定位目标上加装一定频率的合作声信标,接收阵元通过估计时延或时延差来进行定位的设备。
近年来,随着大量水声设备的研发和应用,其覆盖的工作频段越来越宽,而且由于缺少统一的频段使用规范,不可避免地会出现其他水声设备与水下合作目标定位系统的工作频段重叠的问题,对定位测量系统的适用性提出了挑战。同时,定位测量系统的定位精度和设备复杂度不仅与系统结构和定位算法密切相关,而且一定程度上取决于定位信标的设计优劣,良好的定位信标设计不仅可以降低信标信号传播过程中的多种干扰,而且有利于定位系统对信标信号的快速、高精度检测。本文将重点分析和讨论利用FPGA嵌入式系统设计开发一种北斗同步宽频带水声定位信标发射装置的设计方法与实际应用分析,通过宽频带设计以提高声信标信号在复杂水声环境下工作的适用性,易于检测和识别。同时,以高精度北斗秒脉冲作为时統信号,可以在提高对时精度的同时避免在军事用途中使用GPS系统等带来的各种问题。
2 海洋环境对定位信标信号影响分析
海洋独特的内部结构和上下表面对声波造成很大影响,详述如下:
1) 水下声定位信标信号传输受水声信道影响
由于海水介质复杂,空间分布不均匀,而且随机时变,声信号在海洋传播时随机起伏。海洋表面和大气相接触,受温度和气流的影响常常出现波浪和涟漪之类的起伏,造成对声信号的反射和漫反射,引起声信号的随机起伏的频率的展宽[1]。海水中的湍流和热交换会产生温度的不均匀性,声信号在通过这些水层时会产生多路径的干涉效应。这些因素使得声速动态范围很大,声信号接收端呈现出严重的幅度失真和相位失真,声信号畸变很明显。
2) 声定位信号受海洋噪声和环境影响
海洋环境中的背景噪声复杂,潮汐、湍流、海浪、船只等声音共同构成了海洋中的噪音,还有声信号的回波造成的混响,这些都极大地影响了对声信号的分辨[2]。
结合水声信道的特点,定位信标信号发射装置设计需要从时延精度、实时性、功耗、抗噪声干扰等多方面进行考虑,主要对水声定位信标的硬件结构、信标信号编码方式和调制方式以及工作参数进行选择。通过整体上综合考虑,达到一个时延精度、实时性、功耗、设备复杂度之间的平衡,设计出适合系统的定位信标发射装置。
3 基于FPGA的宽频带水声定位信标信号发射系统整体设计
同步水声定位系统为了确知目标发射声合作信标信号的时间,一般需要在测量平台上安装高精度同步对时设备,工作前对目标声源时钟与定位系统时钟进行同步对时,以保证声源按同步时刻定时发射信号,这种对时方式给系统带来额外的硬件设计负担,而且使用繁琐,精度不高。利用北斗定位系统秒脉冲产生同步控制信号为定位测量系统和目标声源对时的方法,可以在减少硬件设计负担的前提下,简单可靠地实现同步对时功能,而且能够保证整个测量过程中信标信号发射的零时刻与定位系统中测距计数器的起始时刻始终一致,从而提高对时精度和测距精度。
本文论述的基于FPGA的宽频带水声定位信标信号发射装置硬件结构是以FPGA嵌入式系统为核心添加各种外围功能模块进行设计,硬件结构框图如图1所示。
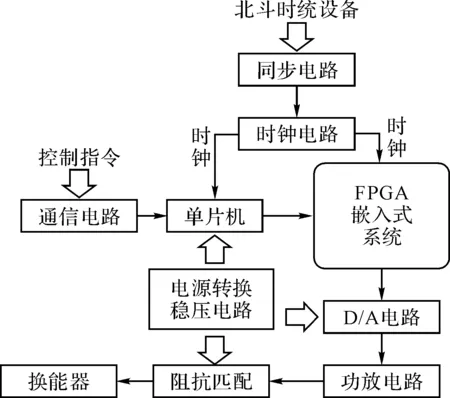
图1 信标发射装置硬件结构框图
功能电路主要由同步电路、通信电路、单片机控制电路、FPGA嵌入式系统、D/A转换电路、功放电路、匹配电路、电源转换和稳压电路以及发射换能器等模块电路构成。它主要用于产生被测目标轨迹测量所需要的测距、测向信号;同时利用北斗定位系统秒脉冲产生同步控制信号,保证在测量开始前与测量船上的接收系统进行同步钟对时,保证信标信号发射的零时刻与接收系统中测距器计数的起始时刻相一致,提高测距精度。
4 系统关键功能部件设计
4.1 FPGA嵌入式系统设计
现场可编程门阵列(Field Programmable Gate Array,FPGA)是可编程逻辑器件的典型代表,FPGA器件具有集成度高、功耗低、体积小、可靠性好、逻辑资源丰富等优点,具有通过用户编程实现专门应用的功能,而且研究人员开发了大量经过验证的IP(Intellectual Property)供设计者使用,可以大大缩短系统的研制周期,减少资金投入[3]。基于FPGA的诸多优点,本系统选用FPGA设计系统逻辑电路。
为实现多功能可配置的宽频带水声定位信标信号发射系统,系统需要有控制核心单元,用以完成与上位机通信功能及对同步信号发生单元的配置功能。控制单元的器件有很多,但从系统的开发周期,设计的难易程度以及功耗等因素,系统要求控制单元要能完成多种工作的控制单元。若用FPGA完成,任务量大,不是最佳选择,用单片机可完成功能设计要求。考虑到本系统可能由电池供电使用,所以功耗问题是系统硬件设计时首要考虑的问题,因此本系统选用超低功耗单片机作为系统的控制单元进行设计,具体设计框图如图2所示。
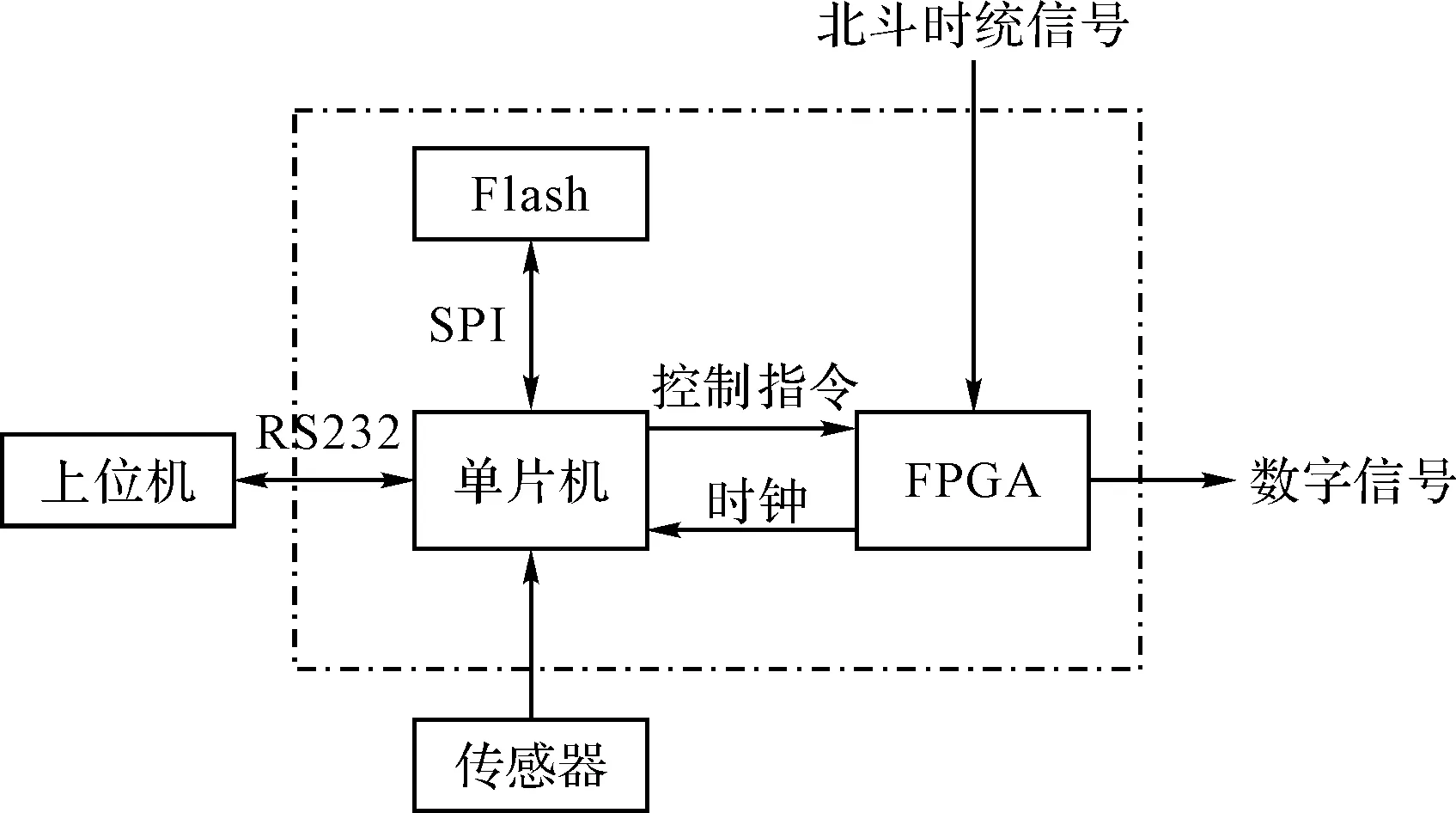
图2 FPGA嵌入式系统框图(虚线框内)
4.2 同步、时钟模块设计
同步声信标是基于同步钟测距方法来实现的,同步对时的好坏直接影响到定位的精度。本系统为保证定位测距的高精度,同步、时钟模块采用低温漂恒温晶振,与基准同步时钟进行同步的计数逻辑可由FPGA嵌入式系统来完成,同时为了降低系统设计的复杂度,减小体积,增强系统工作的稳定性,选择有线同步方式,系统在入水之前通过电缆与北斗定位系统进行同步对时,入水后根据同步信号进行信号发射[4]。另外,由于北斗定位系统和本系统是两个不同的系统,系统电路中信号的电压、电流幅值可能相差很大,在同步对时时,若将两个系统直接互连,有可能将互相干扰,情况恶劣可能导致系统不能正常工作或者烧毁。为了防止这种情况发生,两者之间加装光电耦合隔离器件,这样就能使得双方正常工作而不相互影响。
4.3 DAC、功放、阻抗匹配模块设计
定位信标信号作为模拟信号,FPGA嵌入式系统输出的信号则为数字信号,因此D/A模块要实现数字信号到模拟信号的转换功能。由于DAC电路输出的信号功率无法达到水声换能器发射功率,因此要用功率放大电路来使得水声换能器正常工作。同时,匹配电路则使得定位信标模块输出更好的频率特性,提高发射效率。因此,DAC、功放、匹配电路模块在本系统中是必不可少的一部分。
对于DAC器件来说,采样率是重要的指标之一,由于本系统所产生的信号频率在10kHz以下,选用采样率60kHz以上就能够满足采样定理。DAC器件由串行接口电路、功耗和速度控制器、参考电压控制器、通道锁存器、通道锁存器、缓存、倍放大器组成。整个系统主要包括DA控制模块、信号发射模块、算术运算与控制单元三个部分。DA控制模块主要负责DAC芯片的控制时序运算与控制单元,作为各个功能模块的接口是整个系统的核心[10]。FPGA通过运算控制模块实现对DAC的逻辑控制和数据输出,系统结构框图如图3所示。
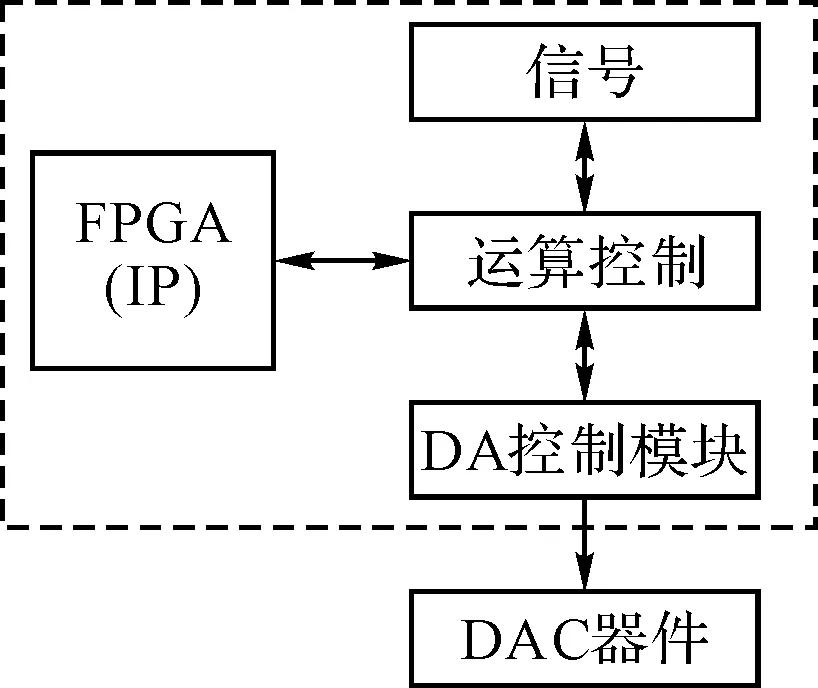
图3 DAC模块结构框图
4.4 功放模块设计
功放模块主要任务是使换能器在不失真的情况下尽可能地获得最大输出功率。由于ADC模块输出信号幅度峰-峰值较小,考虑到后面的功放要达到要求的功率,就必须加大输出电压(峰-峰值),这样就需要一个信号调理电路将信号幅值增大,同相放大电路满足使用需求,其电路原理图如图4所示。
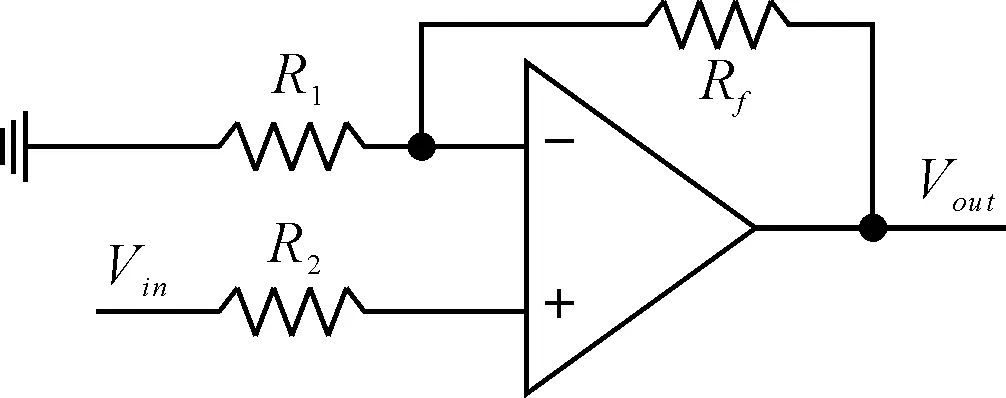
图4 同相放大电路原理图
放大系数满足公式:
(1)
其中:Vin为输入信号,Vout为输出信号。
4.5 阻抗匹配模块设计
压电陶瓷水声换能器是常用的水下声发射装置。这是一种容性负载,它的阻抗或导纳函数同频率很难用数学表达式来精确表述。所以根据换能器的这些特性,可以把换能器简单地表示成为一个由电阻、电容、电感组成的阻抗网络,只有其等效为纯电阻且阻抗与功放的输出阻抗相匹配的时候,才能保证功率输出地效率为最高[5]。匹配电路的设计就是为了实现此功能,使用变压器来与发射换能器的性能进行匹配,使用电感匹配换能器的等效电容,变压器实现阻抗匹配。具体设计时,首先测定发射换能器的工作参数,包括中心频率f0及其所对应的等效电阻R0和等效电容C0,然后计算变压器初,次级线圈及匹配电感L。计算公式如下所示:
变压比:
(2)
变压器初级匝数:
(3)
变压器次级匝数:
N2=N1/n
(4)
匹配电感:
L=1/((2πf0)2C0)
(5)
其中,f0为发射换能器的中心频率,R0和C0分别为发射换能器的并联等效电阻和等效电容,参数r为功率放大电路的等效输出电阻,BS为变压器的磁芯截面积,Vcc为电源的有效电压。
5 信标系统发射信号设计
5.1 信标信号工作方式的选择
定位信标信号发射方式主要有两种:脉冲发射和连续发射。本系统采用使用较广泛的脉冲发射方式,脉冲发射时发射不连续,即每间隔一段时间,定位信号就发射一次。这种工作方式的优点是可以让水声发射单元以“间歇式”方式来工作,在一个发射周期内只有一段时间工作,发射信标信号,从而达到省电与降低功耗的要求[6]。
另外信标信号持续时间,即发射信号的脉冲宽度,对于整个信标系统有较大的影响。信标信号在水中持续时间长,即宽度较宽,定位信号所携带的能量多也就传输的比较远。但是,对于接收系统来说,距离分辨力也降低了。定位信标信号如果太窄了,将会使定位信标信号的带宽很大。接收换能器的带宽往往都是有限的,有一定的通频带。当信号的频谱范围超越这个频带的时候,就会造成信号的接收不完整、信号的失真,进而影响系统的工作性能[9]。
通过以上所有因素的考虑,本装置为了达到要求的性能加大信标系统的通频带,同时信标信号脉冲宽度会选定在几毫秒到几百毫秒内。
5.2 定位信号的参数选择
信标信号类型的选择原则是应当使得定位信标信号波形模糊度函数与混响信道函数不重合,而与传输信道散射函数尽量逼近,提高接收端滤波器的检测性能。
在水下定位系统中,其作用距离是设计者关心的指标。根据这一标准,寻找最佳频率和定位信标信号之间的关系来找到其合适的信号工作频率[7]。
(6)
(7)
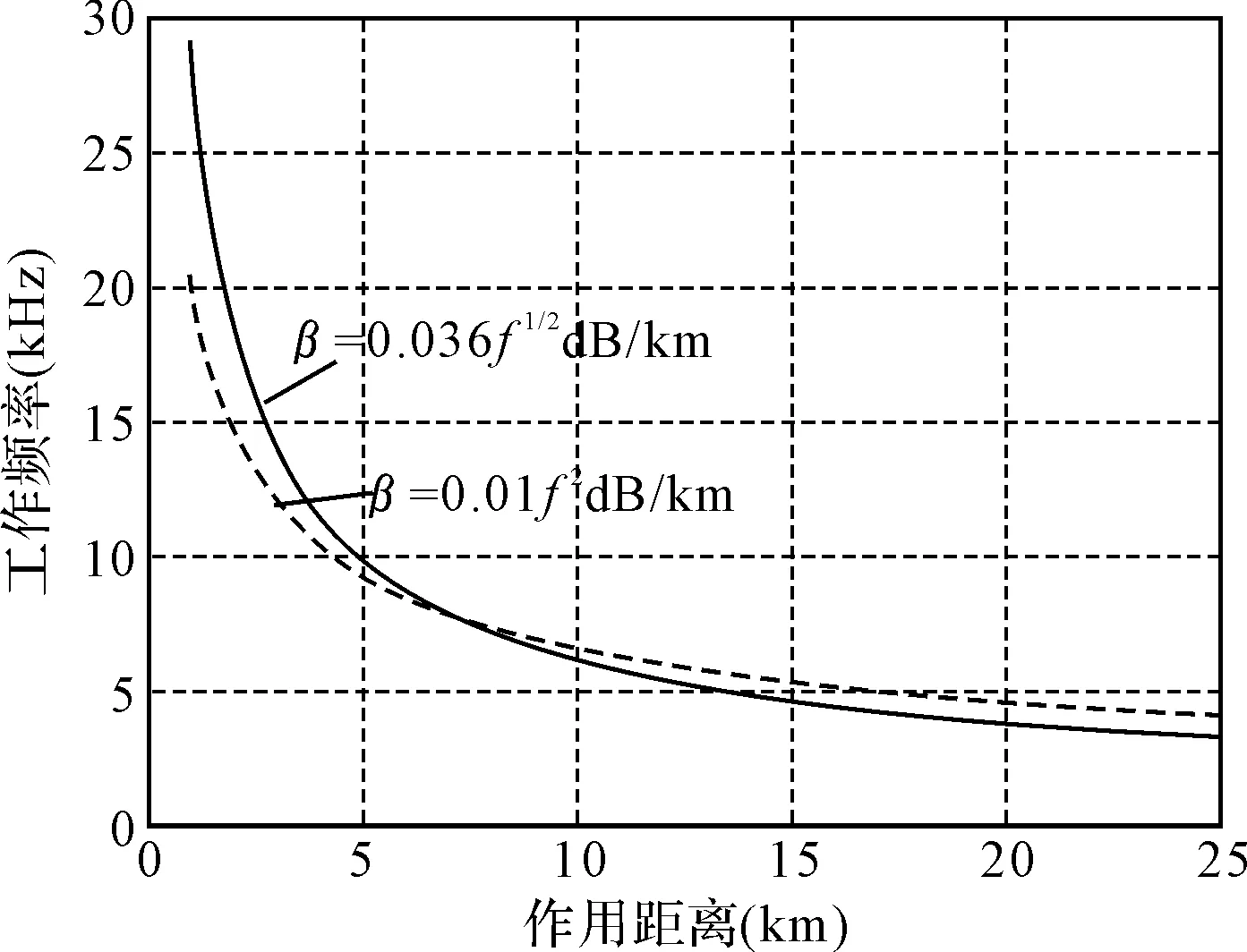
图5 水下声信号工作频率与作用距离的关系
由图5可以得到信号工作频率与作用距离之间的关系定,信标信号工作频率的增加将会使其作用距离明显降低。在本系统中根据所用的发射换能器频带工作范围,定位信标信号的工作频率可以在5kHz~15kHz频率范围内进行选择,其传播距离在之间5km~15km。
6 验证与分析
为了进一步验证本系统在实际应用中的可行性、有效性和准确性,将该系统搭载于某型水下目标模拟器中用以校验、调试水声定位测量基阵测量系统功能指标,其中某型水下目标模拟器作为上位机控制本系统进行工作,具体实物图如图6所示。
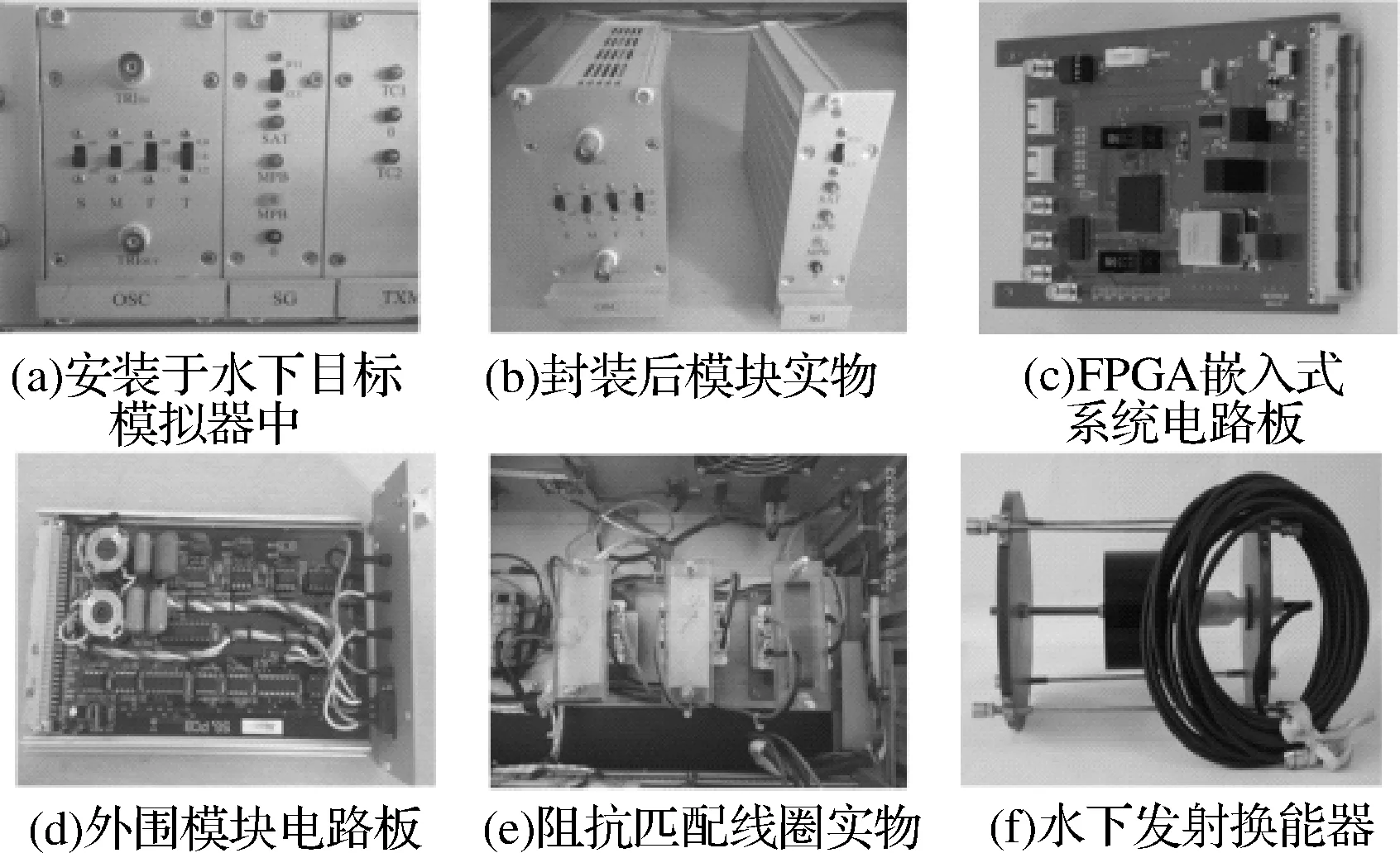
图6 系统各功能部件实物图
在南海某海域由工作母船A将某型水声定位测量阵吊放于水下10m位置处,同时本系统搭载于某型水下目标模拟器中,用工作母船B将水下目标模拟器吊放入水,且与水声定位测量阵处于同一深度,海上试验布放态势图如图8所示。工作母船A、B上各安装有北斗卫星定位系统与北斗卫星时統设备,在实时测量工作母船A、B之间距离L1的同时对两套设备进行北斗时统。试验过程中由水下目标模拟器作为上位机控制本系统发射特定信标信号,水声定位测量阵作为接收端接收信标信号。同时,某型水声定位测量阵利用信标信号经过特定水声定位算法计算两设备之间距离L2。工作母船A、B利用船载北斗卫星定位系统定位两船之间的距离L1。海上试验通过统计母船A、B之间距离L1与两设备之间距离L2之间差值作为试验结果,得到某型水声定位测量阵测量误差如表1所示。
图7 海上试验布放态势图
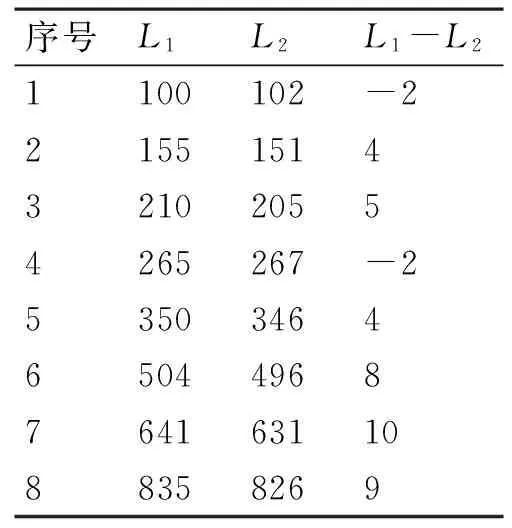
序号L1L2L1-L21100102-221551514321020554265267-2535034646504496876416311088358269
其中,L1为工作母船A、B之间距离,L2为某型水声定位测量阵与某型水下目标模拟器之间距离(以换能器为基准),L1-L2为某型水声定位测量阵测量误差。
7 结语
本系统安装于某型水下目标模拟器用以标校某型水声定位测量阵,其功能满足标校水声定位测量阵的条件,且具有低功耗、体积小、扩展性和兼容性强等特点。同时,本系统采用我国自行研制运营的北斗卫星定位系统作为定位同步设备,克服了以往对国外定位系统的依赖性。利用北斗卫星定位系统高精度定位授时功能,提高了本系统的测量精度和保密性,为本系统应用于军事用途提供条件。
在复杂水声条件的海洋环境下,本系统发射的信标信号均能保持较高的信噪比,特别是在南海深水海洋环境下,可以有效抵御海洋水声信道与海洋噪声对系统的影响,提高信标接收基阵对信标信号识别能力。
由表1抽取8组试验数据进行分析表明利用本系统可以进行水下目标定位,并且通过与北斗卫星定位系统定位工作母船A、B距离比较,得到在800m范围内定位误差可以保证在±10m范围,随着工作母船A、B距离逐渐缩小定位误差也随之减小。
由图7实物图可以看出本系统采用模块化、通用化设计,各个功能模块采用板卡式独立拔插安装且采用标准接口,这样将有利用本系统在不同工作平台上随意移植安装。
[1] Nakhmanson G.. S, Bakaeva G.. A. Output effect of a quadrature receiver whit an input band-pass filter at reception of a phase-keyed wideband signal[C]//Radioelectronics and Communications Systems,2007:205-298.
[2] 刘伯胜,雷加煜.水声学原理[M].哈尔滨:哈尔滨工程大学出版社,1993:10-35.
[3] 王志刚.基于FPGA的高速数字化接收与处理技术[D].南京:南京信息工程大学,2009:98-103.
[4] 许邦建,唐涛.DSP处理器算法概论[M].北京:国防工业出版社,2012.
[5] 胡广书.数字信号处理[M].北京:清华大学出版社,2003:30-89.
[6] 吴永亭,周兴华,杨龙.水下声学定位系统及其应用[J].海洋测绘,2003,23(4):25-31.
[7] 宋海岩,刘伯胜.水声定位及遥测系统接收机设计与实现[D].哈尔滨:哈尔滨工程大学,2008:128-225.
[8] 田野,刘伯胜.水声定位通信系统处理技术研[D].哈尔滨:哈尔滨工程大学,2005:28-105.
[9] 高国青,叶湘滨,乔纯捷,等.水下定位系统原理与误差分析[J].四川兵工学报,2010,31(6):85-96.
[10] 李守军,包更生,吴水根.水声定位技术的发展现状与展望[J].海洋技术,2005,24(1):33-62.
Design of Broadband Beacon Signal Transmitter of Acoustic Positioning System Based on FPGA
ZHANG Guolong WANG Xiaoning
(Unit 93, No. 91388 Troops of PLA, Zhanjiang 524022)
This thesis presents the design and manufacture of the FPGA-based broadband beacon signal transmitter of acoustic positioning system. It can overcome overlap of working frequency band, which radically increases the location accuracy of acoutic positioning system and detection speed of the signal transmitter. This system sends broadband beacon signal transmitter under the control of single chip microcomputer, whose core is FPGA-based embedded system. It will be equipped in a certain type of underwater targetsimulator and a certain type of underwater acoustic array to trial in the waters of the south China. The tests show that the entire system has full functiona, achieves the design goal in advance. The underwater acoustic array can accurately and quickly recognize beacon signal transmitter. The test shows this system time delay can be estimated precisely.
beacon signal, FPGA, acoustic positioning
2016年8月12日,
2016年9月23日
张国龙,男,工程师,研究方向:水下目标模拟技术。王小宁,男,工程师,研究方向:水声信号处理。
TN91
10.3969/j.issn.1672-9730.2017.02.032
