基于单片机MSP430的轴频磁场信号采集系统设计
2017-03-03陈春行林春生孙玉绘翟国君
陈春行 林春生 孙玉绘 翟国君
(1.海军工程大学兵器工程系 武汉 430033)(2.海军海洋测绘研究所 天津 300061)
基于单片机MSP430的轴频磁场信号采集系统设计
陈春行1林春生1孙玉绘1翟国君2
(1.海军工程大学兵器工程系 武汉 430033)(2.海军海洋测绘研究所 天津 300061)
轴频磁场是极其重要的目标识别特征之一,为了获得轴频磁场信号,论文介绍了一种基于MSP430F5438单片机和ADS1254的舰船轴频磁场信号采集系统,详细阐述了系统硬件设计和控制流程,并通过海上实验验证其性能指标满足方案要求。
轴频磁场; MSP430; ADS1254
Class Number TP391
1 引言
舰船在海洋环境中引起的磁场叫做舰船磁场。舰船轴频电磁场是由于舰船主轴转动过程中接触电阻变化,使得海水中舰船腐蚀电流或腐蚀防护电流发生脉动,该脉动电流在海水中产生了以螺旋桨转速频率为基波的极低频电磁场,该信号特征明显,区域性强,在一定距离上易被探测到,是很难被隐身的舰船特征信号,其具有很好的军事应用前景[1]。在此背景下本文设计了一种以TI公司MSP430系列超低功耗单片机作为核心控制元件与ADS1254进行SPI通信,并通过RS485与上位机进行通信的信号采集系统[2]。
2 系统组成与工作原理
信号采集系统主要由磁传感器、信号调理与AD采集模块、单片机控制模块、串口转换电路和电源分配模块等组成。系统组成原理框图如图1所示。

图1 系统组成原理图
图1中,磁传感器输出模拟信号经AD采集电路,将模拟信号转换成数字信号,通过单片机控制,采集结果由RS485通信传送给上位机显示。
3 系统硬件设计
系统硬件设计主要包括三部分:信号调理与AD采集模块,单片机控制模块和电源分配模块。
3.1 信号调理AD采集电路设计
信号调理的主要作用是对信号进行放大滤波,滤除高频干扰,减少噪声。本设计采用仪表放大器对信号进行放大滤波。
AD采集电路通过单片机MSP430F5438控制采集芯片ADS1254来实现。该芯片具有24bit无失码性能,用户可通过SPI接口对该器件进行配置,实现最高20.8kHz的转换速率。该芯片模拟前端具有4个单端通道输入通道,采用5V模拟电源供电,可接受最高±10V的单极性或双极性输入范围[3]。由于ADS1254的数字电源可采用3V和5V供电,因此既可用在普通5V电源系统中又可直接用在低功耗的3V中[4]。在本设计中,芯片的模拟供电AVDD采用+5V,数字供电DVDD采用+3.3V。单片机采用通用IO模拟SPI接口与ADS1254进行通信,完成功能配置和数据交换。本文以Y轴信号为例,AD采集电路原理图如图2所示。

图2 AD采集电路原理图
AD采集电路原理图中,网络标号BY为经过信号调理电路的Y通道信号输入,该通道的选择是由单片机所发送的CHSEL0和CHSEL1信号选择;+5V为参考电压,由芯片ADR391BUJZ-R2提供;SCLK、CHSEL0、CHSEL1、DOUT/DRDY为AD采集芯片ADS1254与单片机接口,其中当DOUT/DRDY引脚处于低电平时,表明ADS1254已经转换完成,准备好被单片机读取,当该引脚处于高电平时,对应ADS1254输出,单片机可通过该引脚读取数据。选择8MHz晶振为ADS1254的外部时钟源。
3.2 单片机控制模块
单片机控制模块为信号采集系统核心部分。系统选用单片机MSP430F5438为中央控制单元,主要功能是控制AD采集芯片进行AD采集,并与上位机进行RS485通信[5]。
单片机控制AD采集芯片采用模拟SPI接口进行通信,单片机为主,ADS1254为从[6]。单片机与上位机进行RS485通信是通过单片机内置串口模块和芯片SP3481完成的。单片机控制模块电路原理如图3所示。
图3中,网络标号ADS1254SCLK、BYOUT、CHSEL0、CHSEL1为AD采集芯片ADS1254与单片机接口。ADS1254SCLK为单片机向ADS1254提供的SPI时钟信号;CHSEL0、CHSEL1为单片机输出端,对应ADS1254输入;BYOUT为单片机输入端,对应ADS1254输出端。本系统中,单片机控制ADS1254通过模拟SPI进行通信,速度较快[7]。
3.3 电源控制模块
信号采集系统的电源分配采用模拟部分和数字部分分开供电的方法,减小了干扰噪声。模拟电源±5V给磁传感器、ADS1254模拟部分供电;±220V给仪表放大器供电;+3.3V给AD采集芯片和单片机控制模块供电,其由普通线性稳压器的AMS1117-3.3及74LV系列芯片提供。AMS1117片内过热切断电路提供了过载和过热保护,以防止环境温度造成过高的结温,损坏芯片[8]。为了确保AMS1117的稳定性,输出需连接滤波电容。系统电源电路如图4所示。
4 系统控制流程
该系统的控制流程主要包括对单片机配置和控制ADS1254进行AD采集,将采集结果按照规定的通信协议与上位机进行RS485通信。系统上电后首先对单片机控制器和ADS1254进行初始化。本系统单片机晶振分别为16MHz和32768Hz,分别提供高低频时钟频率[9]。选择ADS1254的通道进行模数转换,寄存器数据为24位通道的转换模式为连续转换模式。
5 测试实验
图5是本系统在某港口距离某型船约30m的距离所测到Y轴方向的轴频信号,前半部分为环境噪声,大约175s后随着主轴的转动,所测到的轴频信号明显,其基频信号为2Hz如图6所示,这也进一步验证了该系统能在低功耗模式下采集到目标信号[10]。

图3 单片机控制模块电路原理

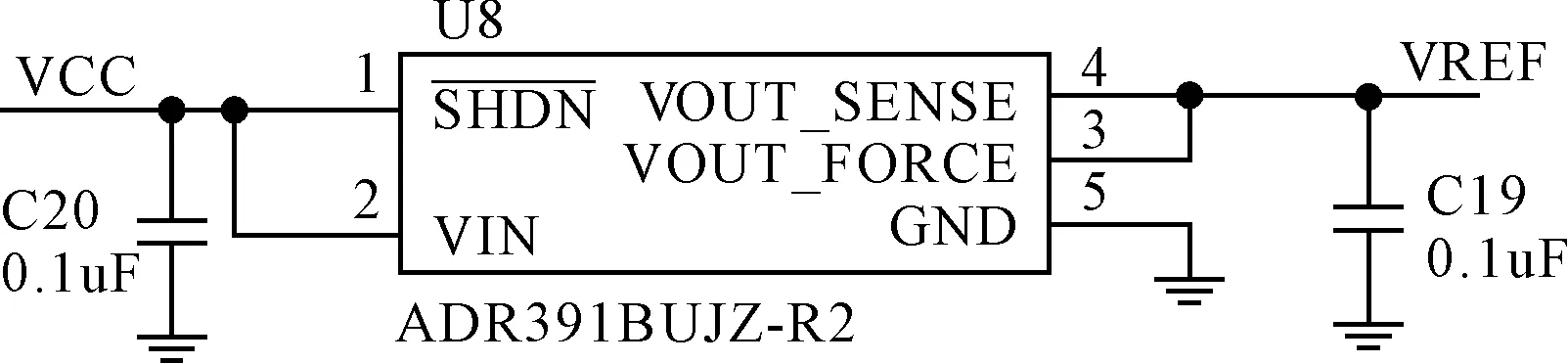

图4 系统电源电路
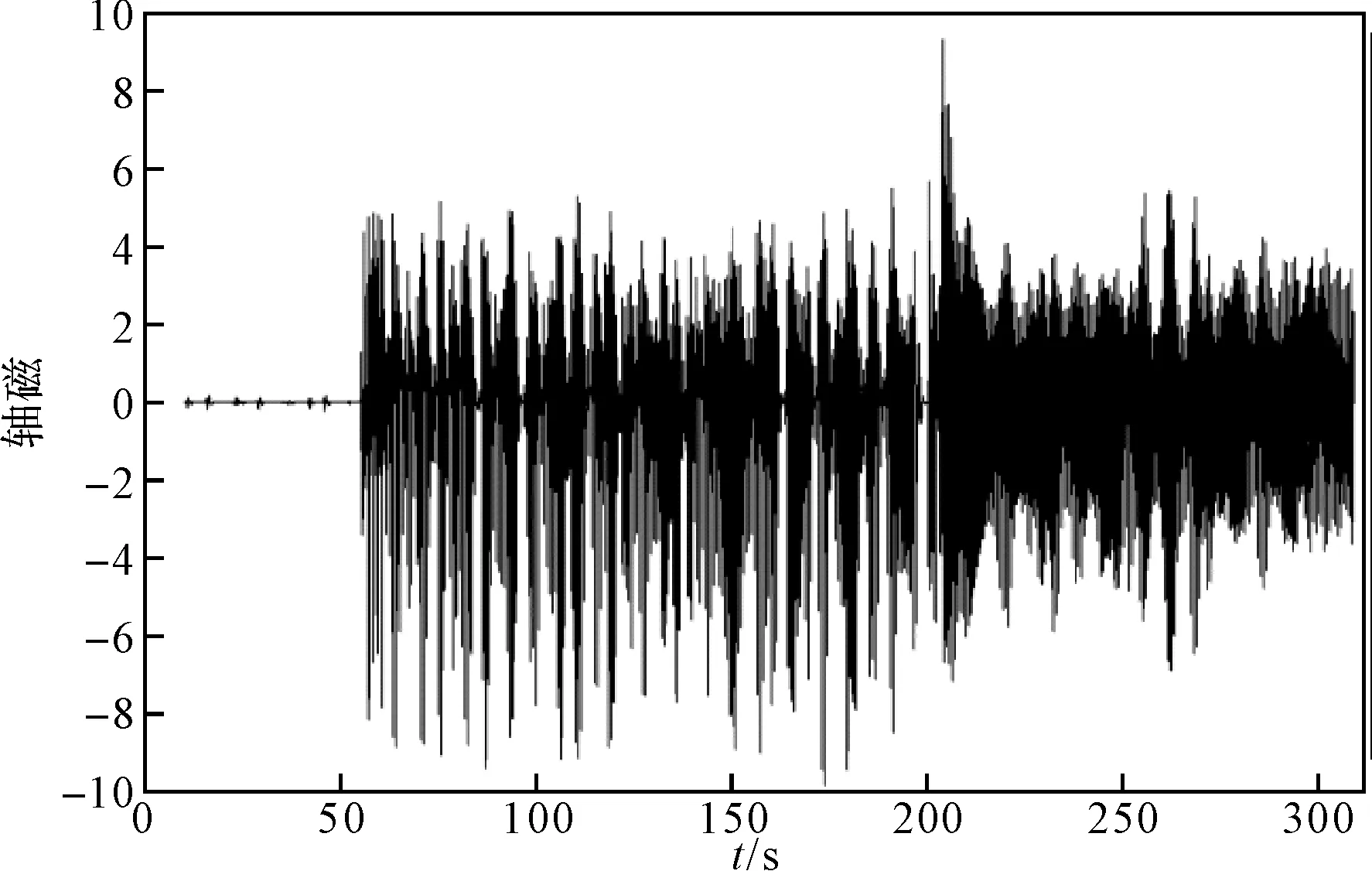
图5 轴频信号时域图

图6 轴频信号频域图
6 结语
舰船在航行状态下会产生明显的轴频磁场信号,频域上存在较稳定的线谱,但是容易受到环境干扰。本文所设计的信号采集系统的精度、分辨力、采样范围及稳定性等指标海试验证,均能满足方案要求。
[1] 林春生,龚沈光.舰船物理场[M].北京:兵器工业出版社,2007:233-249.
[2] 沈建华,扬艳琴,翟骁曙.MSP430系列16位超低功耗单片机实践与系统设计[M].北京:清华大学出版社,2005:46-82.
[3] 赵圣飞,李永红,王恩怀,等.基于单片机的磁强信号检测系统设计[J].仪表技术与传感器,2014(3):59-60.
[4] Analog Devices, Inc. ADS1254 Data Sheet[DB/OL]. http://www.analog.com/UploadedFiles/Data Sheets/ADS1254.pdf.
[5] Texas. Instrument. MSP430F5438 Data Sheet[DB/OL]. http://www-s.ti.com/sc/ds/msp430F5438.pdf.
[6] 魏小龙.MSP430系列单片机接口技术及系统设计实例[M].北京:北京航空航天大学出版社,2002:210-227.
[7] 杨俊春,孙珅,赵国良.AVR单片机中的SPI接口[J].应用科技,2004,32(2):43-46.
[8] AMS1117, 1A low Dropout Voltage Regulators[EB/OL]. 2001.
[9] 沈建华.MSP430系列FLASH超低功耗16位单片机原理与应用[M].北京:清华大学出版社,2004:46-82.
[10] 卿燕玲.高速数据采集及信号处理[D].成都:四川大学,2006:8-12.
Design of Shaft-rate Magnetic Field Signal Acquisition System Based on MSP430
CHEN Chunhang1LIN Chunsheng1SUN Yuhui1ZHAI Guojun2
(1. Department of Ordance Engineering, Naval University of Engineering, Wuhan 430033) (2. Naval Institute of Hydrographic Surveying and Charting, Tianjin 300061)
Shaft-rate magnetic field of a ship is one of features of the important target recognition. In the course of the shaft-rate magnetic field, this paper provides the signal acquisition system of magnetic field based on single-chip microcomputer of MSP430 and ADS1254. It expounds the system hardware and control flow in detail. The test indicates that all index meet the project requirement.
shaft-rate magnetic, MSP430, ADS1254
2016年8月11日,
2016年9月16日
国家自然科学基金项目(编号:41374018)资助。
陈春行,男,硕士,研究方向:军用目标特性及信息处理技术。林春生,男,博士,教授,研究方向:军用目标特性及信息处理技术。孙玉绘,男,博士,研究方向:军用目标特性及信息处理技术。
TP391
10.3969/j.issn.1672-9730.2017.02.027
