拖曳式浮标海面尾迹图像仿真研究
2017-03-03王永生刘翠海孙华庆郝晓虎
刘 岩 王永生 刘翠海 孙华庆 郝晓虎
(1.海军潜艇学院 青岛 266000)(2.91033部队 青岛 266000)
拖曳式浮标海面尾迹图像仿真研究
刘 岩1王永生1刘翠海1孙华庆1郝晓虎2
(1.海军潜艇学院 青岛 266000)(2.91033部队 青岛 266000)
利用开尔文尾迹理论,构建拖曳式浮标海面尾迹仿真模型,并对拖曳浮标在海洋背景场条件下不同航速、不同吃水航深、不同粘滞系数的尾迹进行仿真对比,分析尾迹波的变化。结果表明,当仅考虑尾迹水动力模型时,浮标吃水深度一定,在一定航速范围内,航速越大,尾迹越清晰;当航速一定,浮标吃水深度不同时,尾迹图像明显不同。
拖曳式浮标; 尾迹模型; 仿真分析
Class Number TN92
1 引言
为实现水下隐蔽通信问题,各国海军一直在寻求更为有效的通信手段。其中,通信浮标技术代表着一种重要的发展方向。以美国为代表的西方军事发达国家把通信浮标作为解决潜艇水下隐蔽通信的重要手段,先后研发和成功研制多种类型的通信浮标。拖曳式浮标是其中应用较为广泛的通信浮标之一,其由一根较长的电缆与艇体相连,浮标体自身重量较大,为确保其通信可靠性,浮标只能在一定的航行深度和航速,工作海况不得大于5级。尽管拖曳式浮标体积相对较小,但也足以在水面产生明显尾迹特征,仍存在被合成孔径雷达等侦测设备捕捉的可能性。因此,对拖曳式通信浮标的尾迹研究具有实际意义。
本文对拖曳式浮标在水面状态航行时产生的尾迹进行建模仿真,并将尾迹波与海洋表面波浪背景场相叠加,分析不同条件下的尾迹特征。
2 拖曳式浮标尾迹模型
开尔文尾迹是船体对水面的扰动而产生的尾迹,开尔文尾迹模型也适用于拖曳式通信浮标的尾迹仿真。该模型运用格林函数来描述流体点源的运动,在一定的边界条件下,可以得到近表面的速度,从而得到波高。
如果只考虑尾迹的表面重力波,忽略湍流尾迹,假设拖曳式通信浮标在工作状态时的航速为V,航向为x,其运动过程中产生的自由表面波高可以用以下函数表示:
(1)
其中k0=g/V2,g为重力,θ是基于航向的波浪传播方向,Re是实部,A(θ)是和特性有关的函数。在一定的近似条件下,将基于纵向中心面的浮标的场源分布来代表浮标表壳。根据这个理论,场源强度可以表示为
(2)
F是浮标表壳函数;在远场波浪的条件下,A(θ)表示为
(3)
其中H(k,θ)是科钦函数(SH是浮标表壳):
(4)
简化形状为:浮标体水线是抛物线,浮标两侧是垂直的,f表示为
(5)
b是浮标宽度,l是浮标长度;考虑粘滞拖曳作用对侧波的影响,波高表达式为
ζ(x,y)=ζ0(x+l,y)+Cζ0(x-l,y)
+ζ1(x+l,y)+Cζ1(x-l,y)
(6)
C是粘滞系数,函数ζ0(x,y)、ζ1(x,y)的表达式分别为
·sin(h(x,y))dθ
(7)
·cos(h(x,y))dθ
(8)
h(x,y)=k0(secθ)2(xcosθ+ysinθ)
(9)
3 仿真结果及分析
3.1 仿真步骤
基于上述模型,仿真步骤如下:
1) 输入浮标尺寸、吃水深度、航速等参数,模拟出浮标尾迹波形;
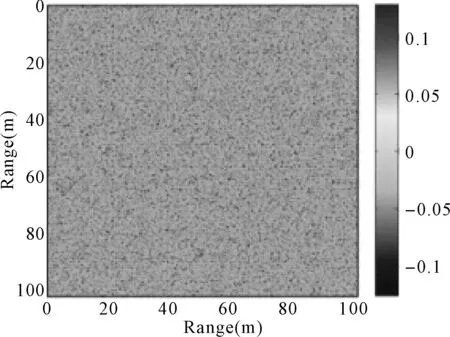
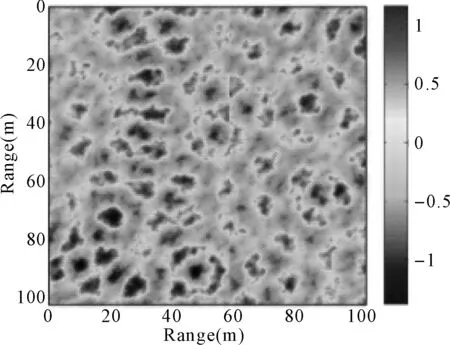
2) 运用随机产生的噪声,模拟海背景场;
3) 将尾迹与背景场叠加,模拟波高。
3.2 仿真结果分析
假定浮标体积参数为1900mm×1100mm×1000mm,浮标体在5级海况下能够正常工作。仿真时,图像分辨率设置为512×512,精度为0.2m。
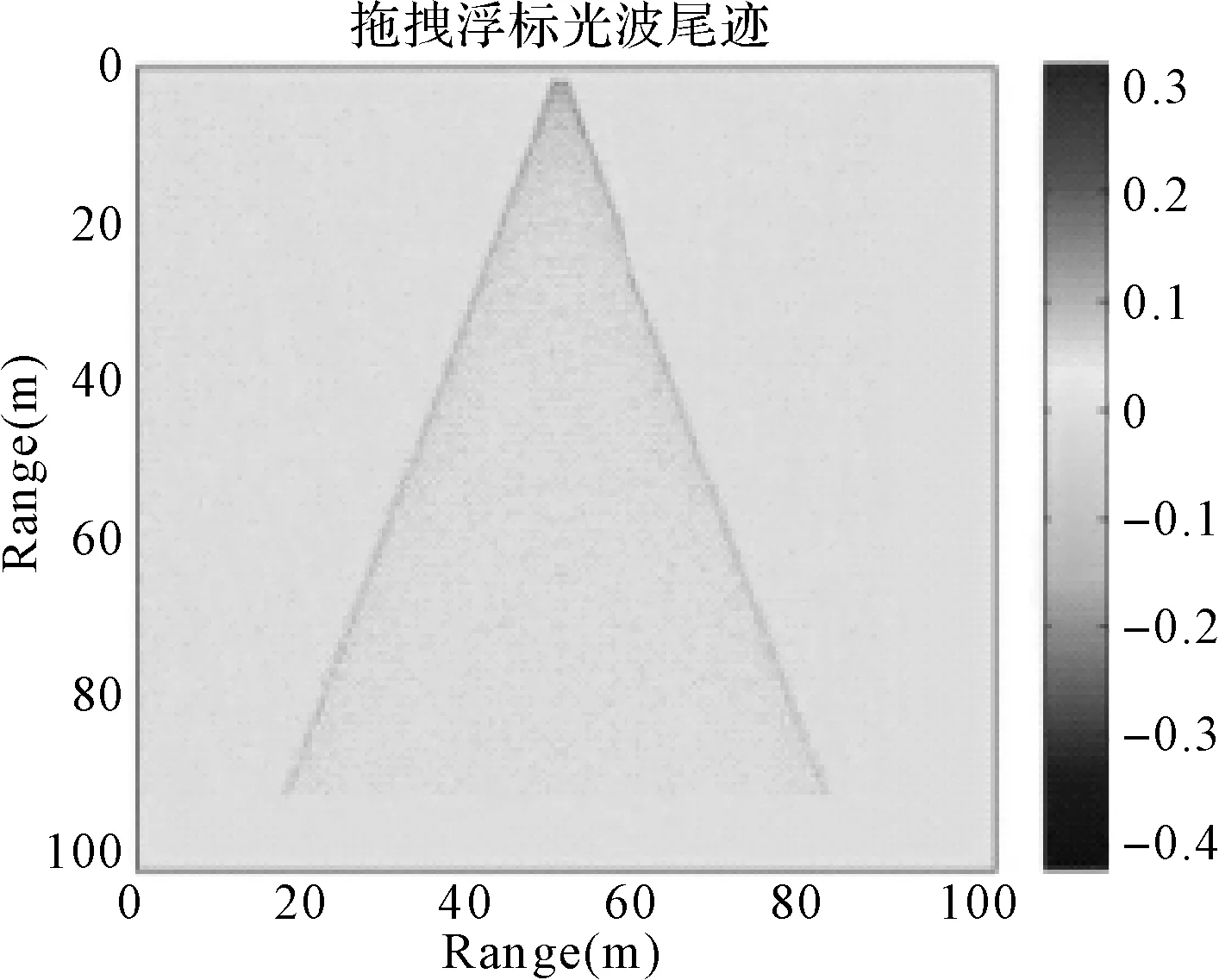
3.2.1 浮标吃水深度一定,不同航速条件下的尾迹波仿真结果
浮标工作时,对航速有一定要求,以确保通信的可靠性和隐蔽性。仿真过程中,取8kn、5kn,2kn三个航速进行运算和对比分析,更全面地对不同航速条件下的尾迹波进行研究。
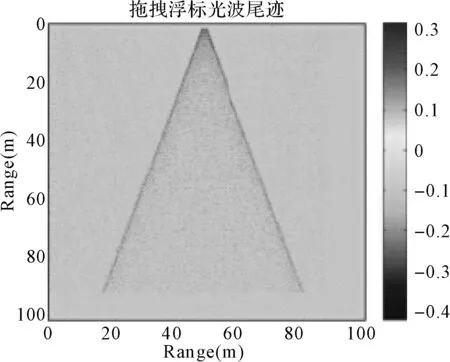
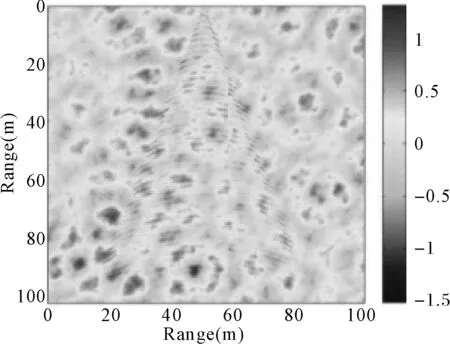
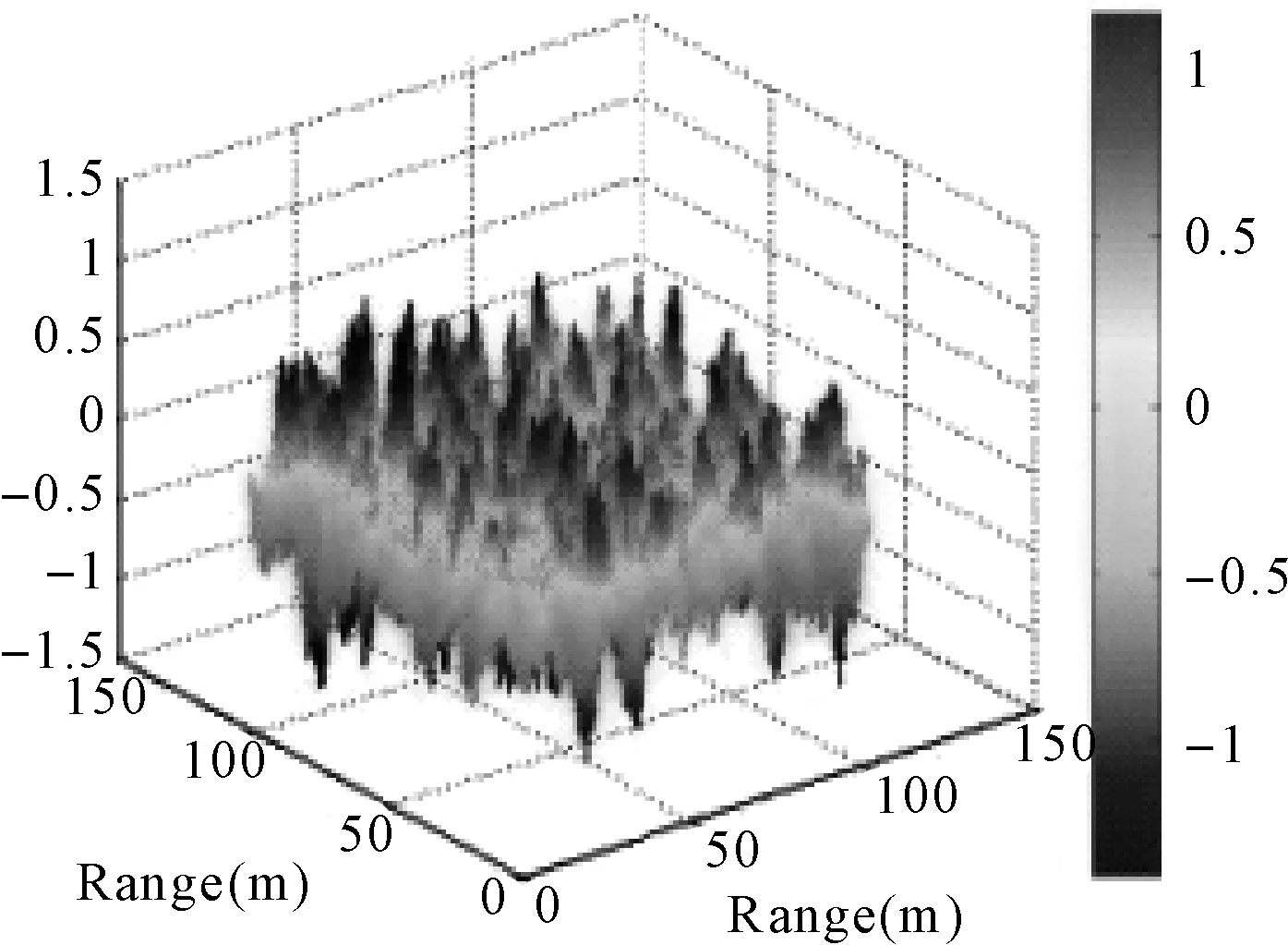
图1反映的是浮标吃水深度为1m,海水粘滞系数为0.1,分别在三个航速下的仿真结果图。

(a)V=8kn

(b)V=5kn


(c)V=2kn
通过比对分析,从图中可以看出,当航速在2kn时,图像模糊,基本无尾迹特征;当航速为5kn时,出现明显尾迹波;当航速达到8kn时,尾迹波很明显,横波清晰可见。可以得出,当浮标吃水深度不变时,艇速在2kn~8kn的范围,速度越大,浮标运动过程中产生的尾迹波越明显,反之,航速越小,尾迹特征越不明显。
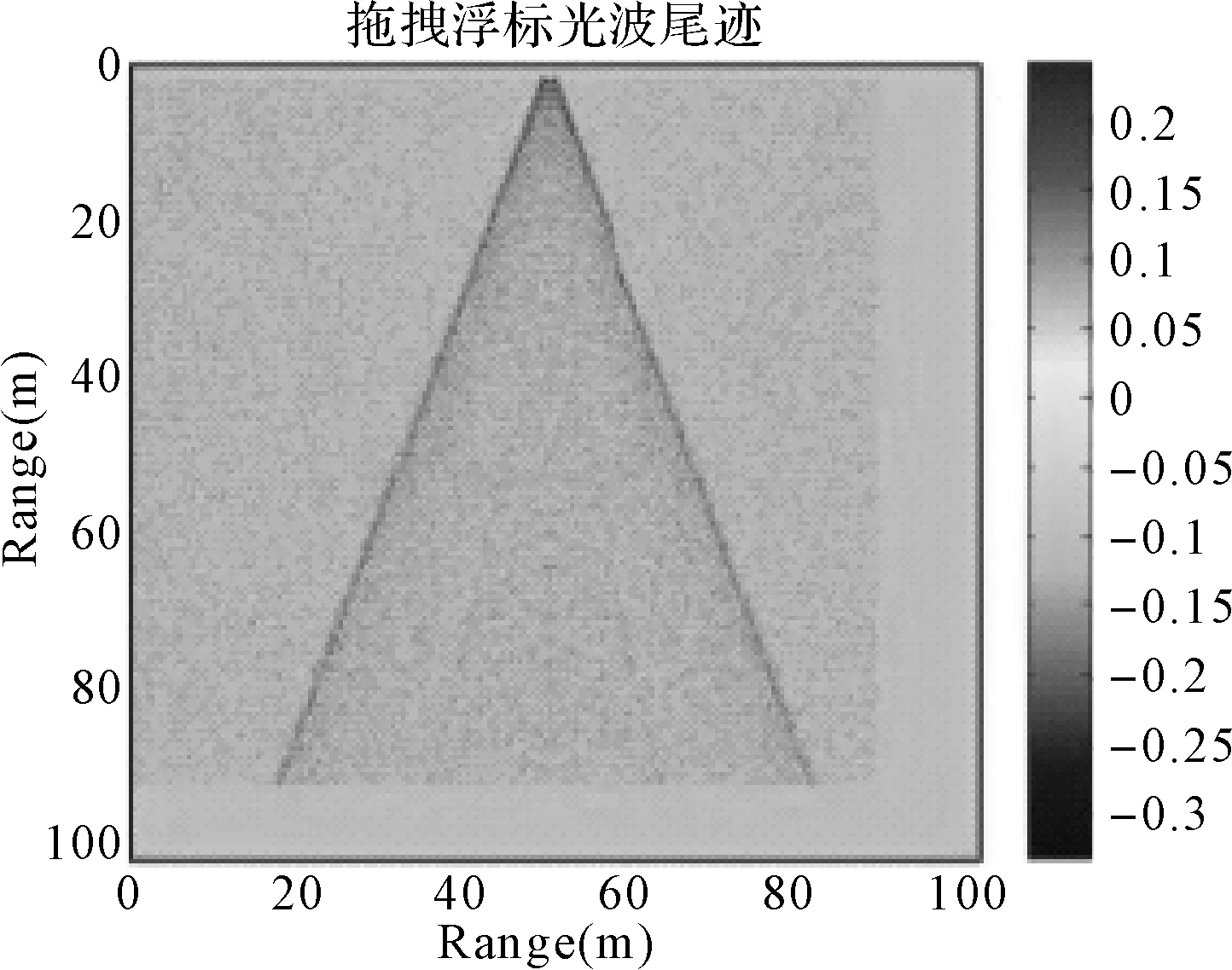
3.2.2 航速一定,浮标不同吃水深度条件下的尾迹波仿真结果
拖曳式通信浮标在工作状态时,受潜艇航行深度、线缆拖曳长度、浮标体重量等影响,是处于不同的吃水深度的。由于浮标上安装的天线体必须露出水面,所以,其吃水深度有限。考虑到浮标高度,取吃水深度0.25m、0.5m和1m深度进行仿真对比。
图2反映的是航速在5kn,粘滞系数0.1时,三种吃水深度下的仿真结果。


(a)d=0.25m

(b)d=0.5m

(c)d=1m
从仿真结果图中可以看出,当吃水深度在0.25m时,无明显尾迹波,当深度达0.5m时,海面有较清晰尾迹波,当深度达到1m时,尾迹波非常明显。可见,当航速一定时,浮标的吃水越大,尾迹波越明显,当吃水深度达到1m时,尾迹波最明显。
3.2.3 浮标吃水深度一定、航速一定,不同粘滞系数的仿真结果
在不同海区,海水的粘滞系数是不同的,也会造成浮标尾迹的变化,波形不一致。取航速在5节,浮标体吃水深度为1m,对粘滞系数分别为0.1、0.2、0.3进行仿真。


(a)C=0.1


(b)C=0.2


(c)C=0.3
通过比对分析,从图3中可以看出,粘滞系数影响尾迹波形的大小,粘滞系数越大,尾迹越大。但波形无明显改变,可以看出,粘滞系数对波形的影响较小。
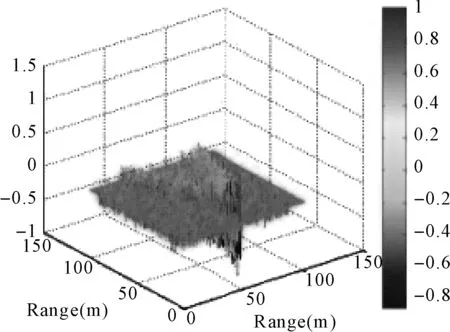
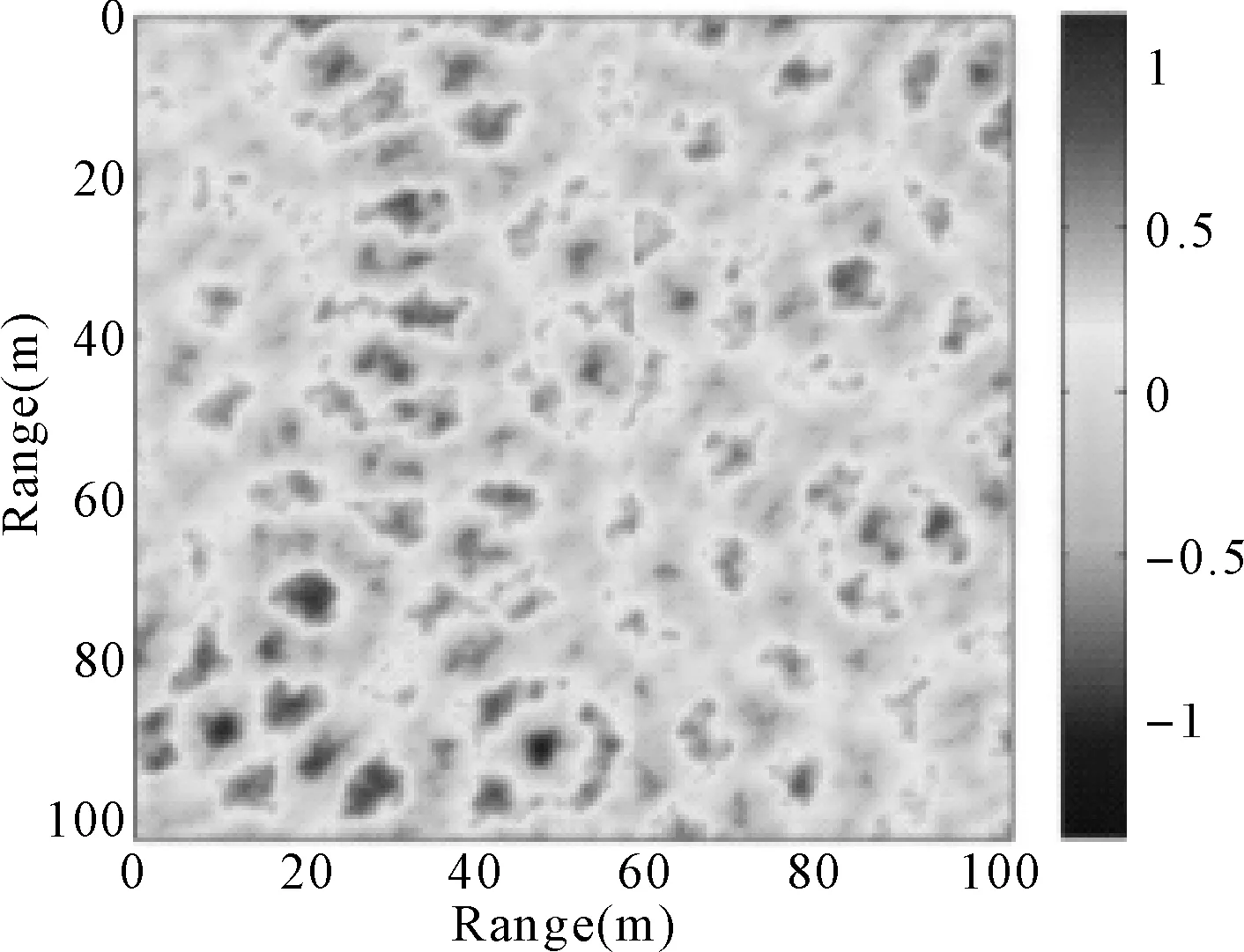
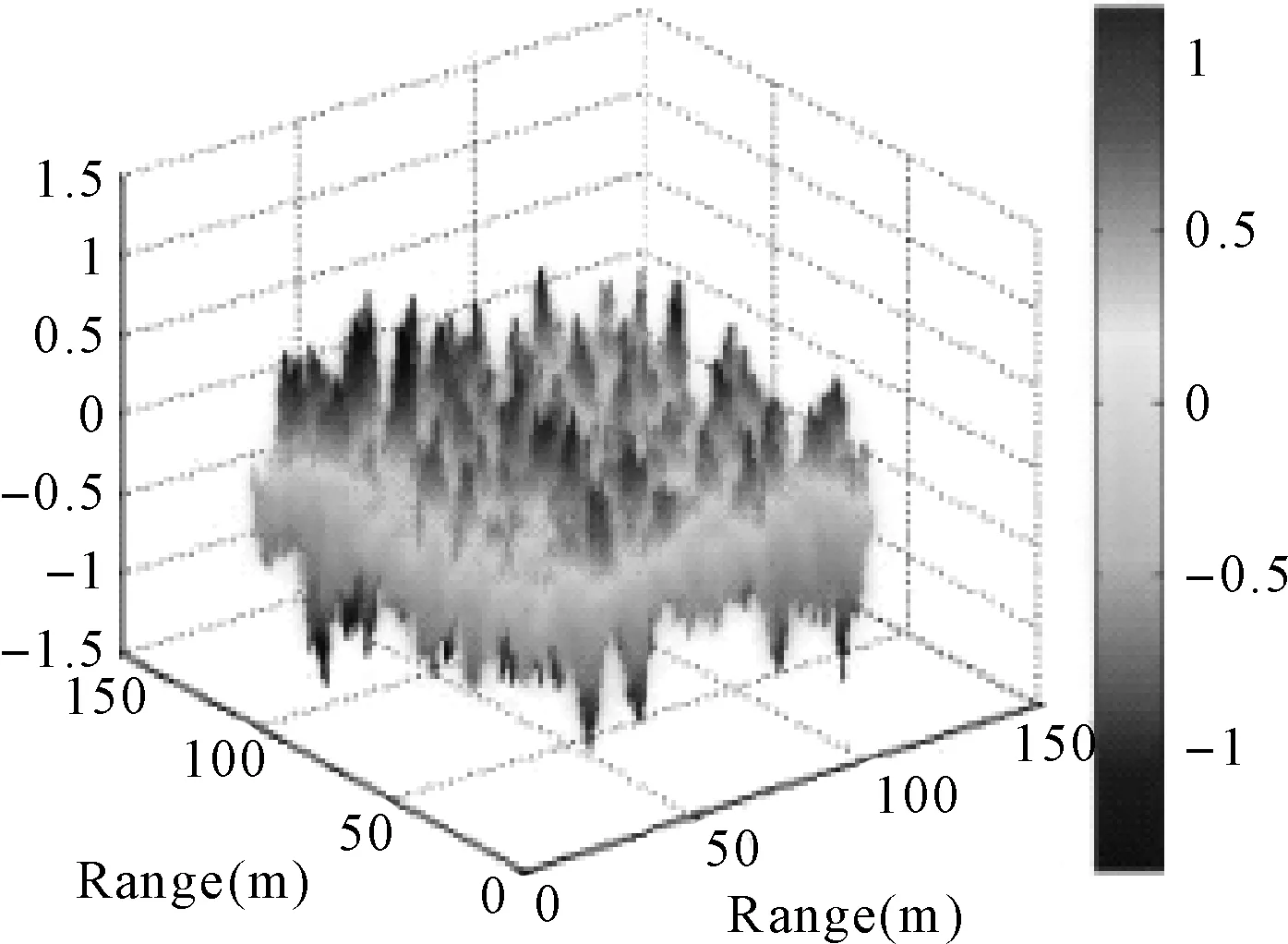
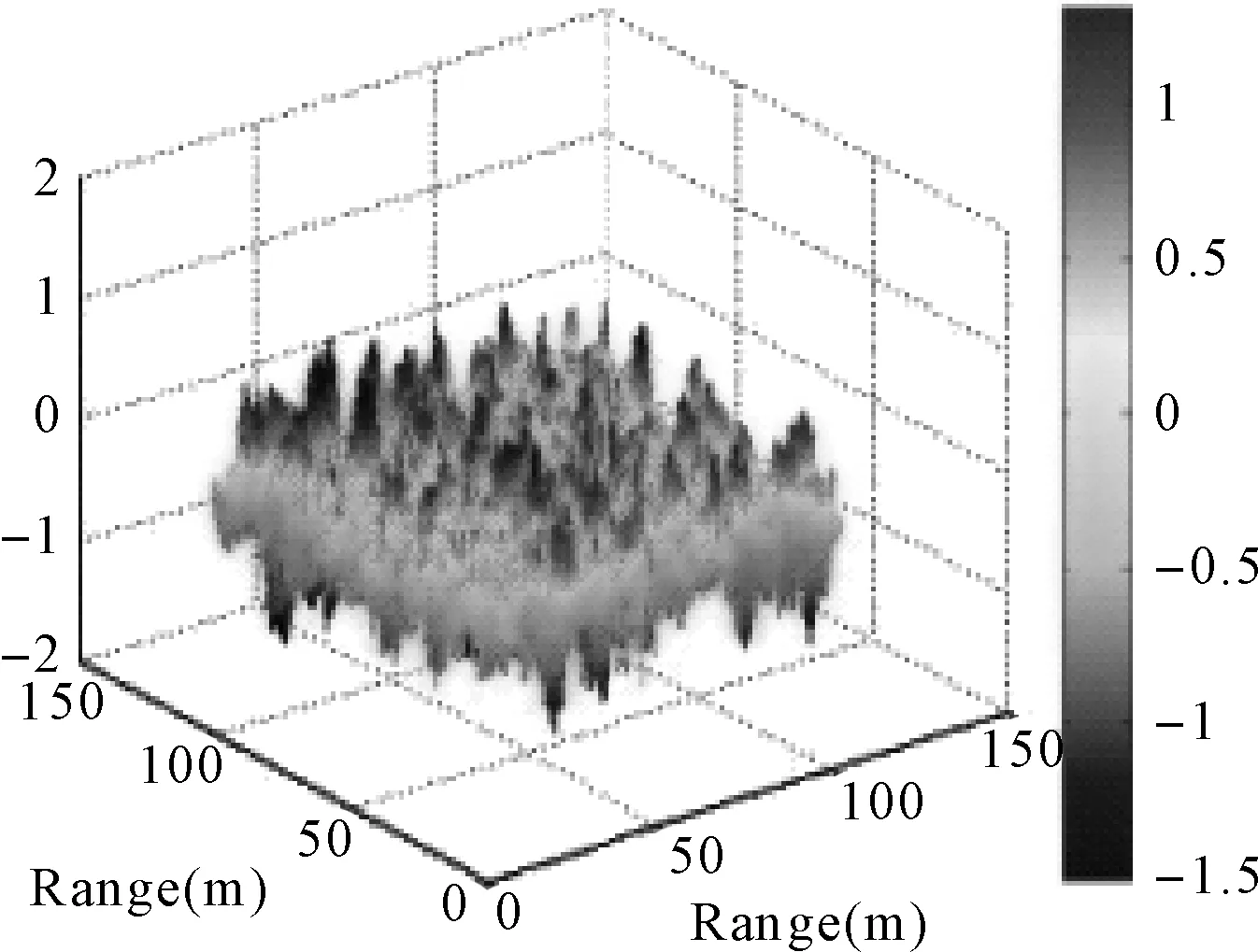
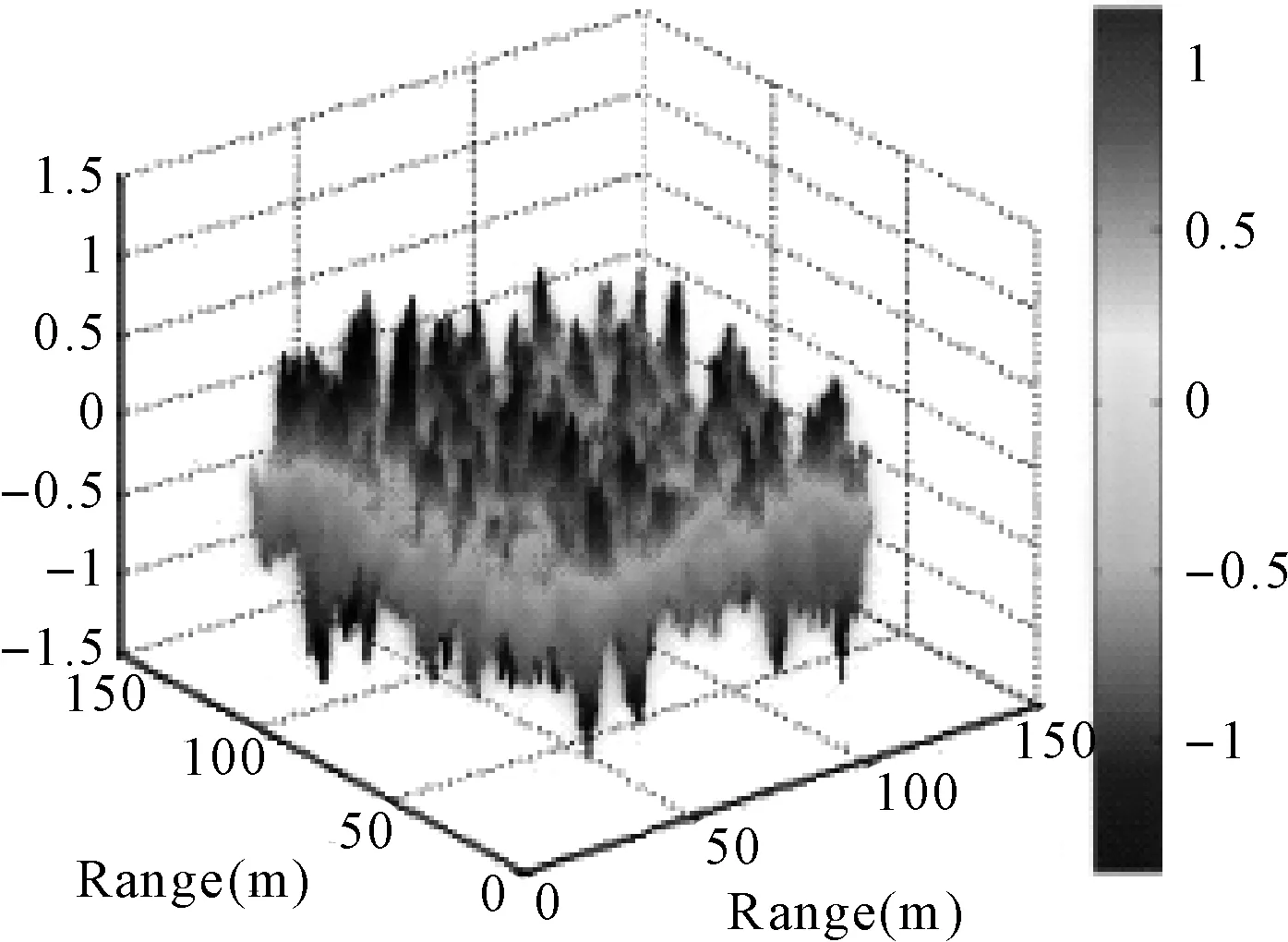
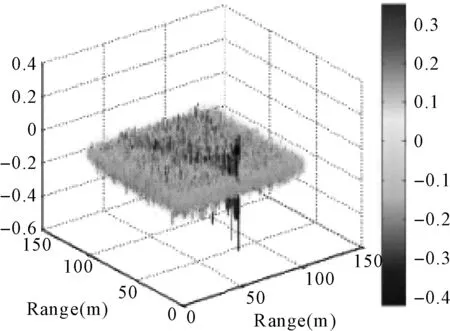
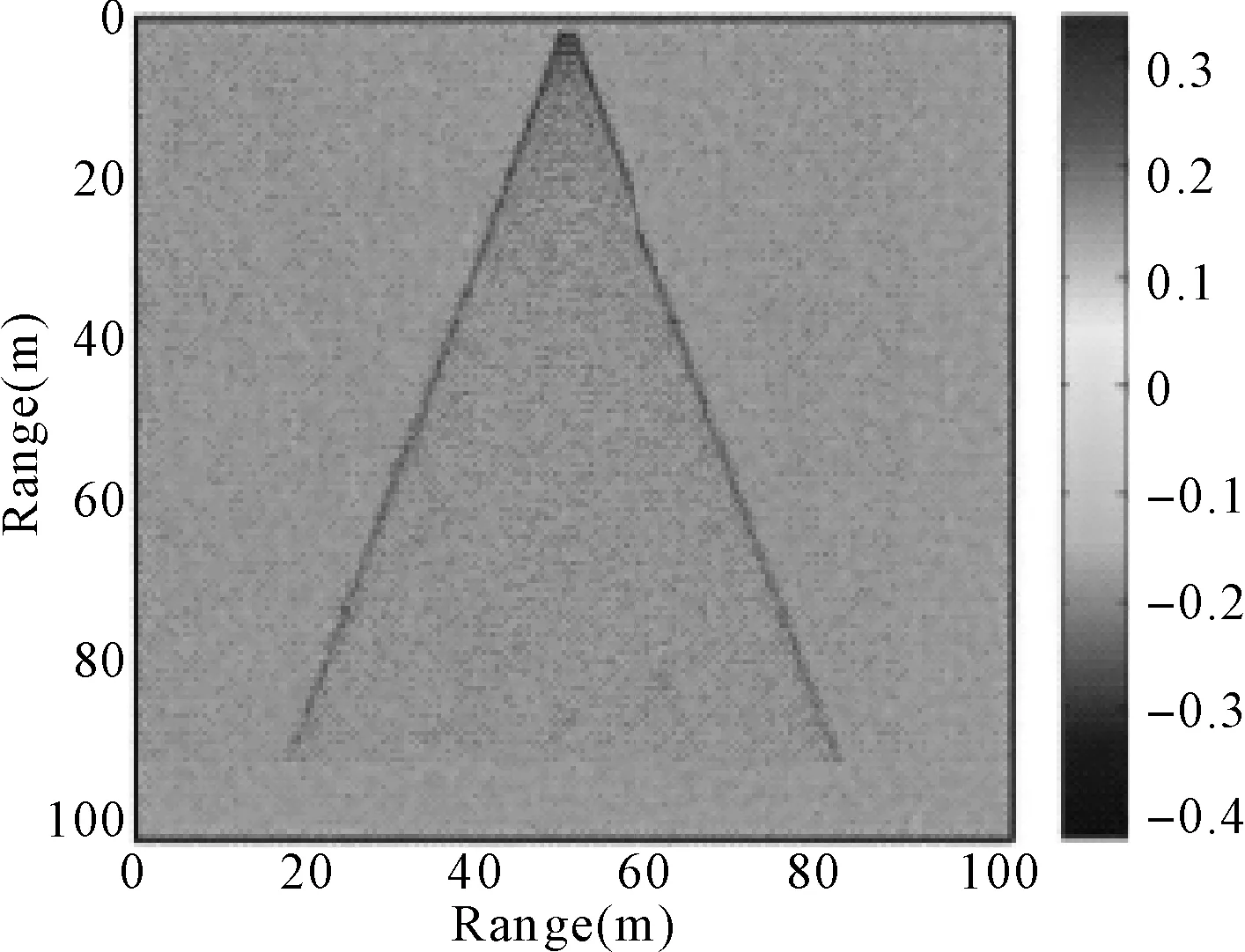
4 尾迹与海洋背景场叠加后的仿真分析
尾迹波的波形不仅与潜艇航速、浮标吃水深度、海水粘滞系数直接相关,而且还受到海洋背景场的影响。下面在原仿真的基础上,将不同航速、不同吃水深度、不同粘滞系数的浮标尾迹波分别叠加海表面风速3m/s(2级海况)、9m/s(5级海况),风向45度的海洋背景场,对结果进行比对分析。
4.1 不同航速的叠加
1) 风速3m/s,风向45°

(a)V=2kn


(b)V=5kn


(c)V=8kn
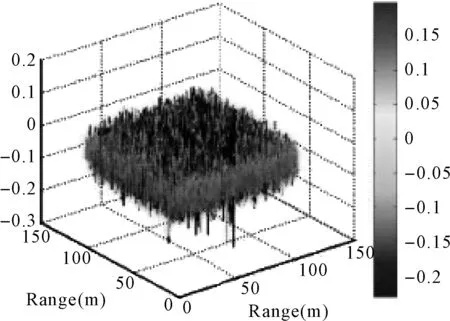
2) 风速9m/s,风向45°
(a)V=2kn


(b)V=5kn
(c)V=8kn
4.2 不同吃水深度
1) 风速3m/s,风向45°

(a)d=0.25m

(b)d=0.5m


(c)d=1m
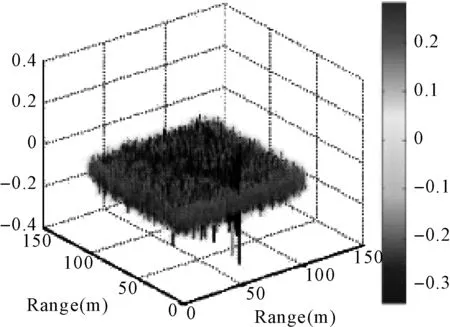
2) 风速9m/s,风向45°

(a)d=0.25m


(b)d=0.5m


(c)d=1m
4.3 不同粘滞系数
1) 风速3m/s,风向45°

(a)C=0.1


(b)C=0.2

(c)C=0.3
2) 风速9m/s,风向45°

(a)C=0.1

(b)C=0.2


(c)C=0.3
可以看出,在2级海况情况下,航速越大,吃水深度越深,粘滞系数越大,波形越明显,海洋背景场对尾迹波的影响越小;在5级海况情况下,海洋背景场对尾迹波的影响显著,波形被淹没。
5 结语
为了提高潜艇的隐蔽性,必须考虑潜艇浮标天线在海面形成的尾迹波被反潜兵力发现而造成的潜艇暴露问题。利用开尔文尾迹仿真模型,对拖曳式浮标海面尾迹进行仿真研究。潜艇航速、浮标吃水深度、海水粘滞系数等因素对浮标尾迹波的影响比较大,相对平静海况下,当吃水深度一定,随着航速的增加,尾迹特征越明显,航速5kn时,浮标尾迹特征已经明显;当航速一定时,随着浮标吃水深度越深,尾迹波越明显,吃水深度1m时尾迹特征明显;海水粘滞系数越大,尾迹波越明显,但波形变化不大。从对尾迹波叠加海洋背景场的仿真来看,在2级海况的下,浮标尾迹波形明显,当海况达到5级时,尾迹波淹没在海洋背景下。由于缺少与真实的SAR图像的对比,本文的模型和仿真还有待进一步改进和优化。
[1] 刘新安,罗曼,吴坤兴.潜艇通信浮标发展研究[C]//中国通信学会学术年会,2008.
[2] 王光源,马海洋,李冬.拖曳式通信浮标对潜艇隐蔽性的影响[J].舰船科学技术,2012,34(3):107-110.
[3] 李丽华,王永斌.潜艇拖曳综合浮标及其关键技术[J].舰船电子工程,2005,25(5):23-25.
[4] 罗曼,陈敏慎,曾东.潜艇拖曳通信浮标体应用与发展初探[J].舰船科学技术,2008,30(B11):77-80.
[5] 张建忠,秦建存.浮标通信的仿真与设计[J].无线电通信技术,2012,38(5):74-76.
[6] 巩彪,黄韦艮.SAR图像船只尾迹检测研究综述[J].遥感技术与应用,2012,27(6):29-36.
[7] 巩彪,黄韦艮,陈鹏.Kelvin尾迹SAR图像仿真研究[J].海洋通报,2013,32(2):208-213.
[8] 侯海平,陈标,刘翠华等.海洋背景下开尔文尾迹仿真与分析[J].计算机仿真,2007,24(8):12-15.
[9] 叶文隽.SAR图像舰船尾迹检测研究[D].长沙:国防科学技术大学,2009.
[10] 胡召玲,李海权,杜培军.SAR图像纹理特征提取与分类研究[J].中国矿业大学学报,2009,38(3):422-427.
Towed Buoy Sea Wake Image Simulation Research
LIU Yan1WANG Yongsheng1LIU Cuihai1SUN Huaqing1HAO Xiaohu2
(1. Navy Submarine Academy, Qingdao 266000)(2. No. 91033 Troops of PLA, Qingdao 266000)
A trail simulation model of towed buoy is established based on the Kelvin ship wake model. Trail simulations on various options, i.e. speed, navigation depth and viscous coefficient, are made combined with ocean background field to gain wake diagram for analysis. The results show that, considering only the wake model, the transverse wave arises with the navigation speed within a range when depth is certain, the wake varies a lot with the depth when the navigation speed is certain.
towed buoy, wake model, simulation analysis
2016年8月10日,
2016年9月18日
刘岩,女,硕士研究生,助理工程师,研究方向:军事通信。王永生,男,硕士,教授,研究方向:军事通信。刘翠海,男,硕士,副教授,研究方向:军事通信。孙华庆,男,硕士研究生,研究方向:磁异常信号检测。郝晓虎,男,助理工程师,研究方向:军事通信。
TN92
10.3969/j.issn.1672-9730.2017.02.017