交流伺服电机的PLC控制综合性实验开发与设计
2017-03-02陈英俊黄崇林
陈英俊, 黄崇林
(广东石油化工学院 机电工程学院, 广东 茂名 525000)
交流伺服电机的PLC控制综合性实验开发与设计
陈英俊, 黄崇林
(广东石油化工学院 机电工程学院, 广东 茂名 525000)
为探索机械类创新应用型人才的培养模式、提高学生的工程实践能力,根据交流伺服电机的位置控制模式及PLC高速脉冲输出原理,开发和设计了交流伺服电机的PLC控制综合性实验。实验内容包括设置交流伺服驱动器参数、电气设计与连线、运用PLC的高速脉冲处理指令编制程序,以及控制电机按指定的速度运行、单轴快速定位和指定的加减速动作。通过实验,学生巩固和扩展了课堂知识、激发了学习兴趣、提高了教学质量。
交流伺服电机; PLC控制; 综合性实验
随着交流伺服技术的发展,其技术越来越成熟,成本也不断地在降低,交流伺服电机逐渐取代直流伺服电机成为机电一体化技术和产品中主流控制用电动机[1-2]。特别是在多自由度的工业机器人、现代数控机床上,交流伺服电机因为其使用的便利性及免维护性,得到了广泛的应用[3- 4]。交流伺服控制技术是高校机械类专业学生必须学习和实践的重要内容[5- 6],而可编程控制器(programmable logical controller,PLC)是在工业控制中广泛采用的一种稳定可靠的控制器,学生在高年级时已经修读过相关课程,具备了开展交流伺服电机的PLC控制综合性实验的知识基础。本文根据探索机械类创新应用型人才培养模式的需要,以巩固机械类学生相关的专业课程知识与提高其工程实践能力、创新能力为目标,在交流伺服电动机系统和PLC控制器组成的实验平台上,开展交流伺服电机的PLC控制综合性实验技术研究,开发设计相应的实验项目,对提高机械类专业学生的培养质量具有实际意义。
1 实验设计原理
实验开发与设计的目的,在于学生通过在本实验中综合运用交流伺服电机与PLC控制的知识,设计和搭建出PLC控制交流伺服电机的系统,学习和掌握交流伺服电机及其驱动器的操作和使用方法,实现交流伺服电机的单轴定位和加减速等的简单控制,进一步强化学生对“机电一体化设计基础”“可编程控制器”“机电传动控制”等课程知识的掌握,提升学生的实际操作能力。同时教师利用此新的教学手段,提高教学质量和学生的学习效率。
1.1 交流伺服电机及其驱动器的理论基础
对于一般简单的机电一体化控制系统,常常采用廉价的步进电机,其控制精度已经足够;对于要求控制精度高,并且速度、负载变化大的场合,则应该采用交流伺服电机,又因其使用方便,所以常常取代了直流伺服电机[7]。交流伺服电机必须与驱动器配套使用才能够正常工作,伺服驱动器为伺服电动机提供动力及相应的控制信号,并且根据电动机尾部的光栅传感器检测到的电机速度或位置信号,实时调整电机动作,使其与设计人员既定的使用要求相匹配。交流伺服系统示意图如图1所示。

图1 交流伺服系统示意图
交流伺服电动机的驱动器常见的3种控制模式有:位置控制、速度控制和转矩控制[8]。位置控制是通过上位机提供给伺服驱动器的脉冲控制信号来控制伺服电机动作的,而速度控制和转矩控制则是通过上位机提供的模拟量控制信号去控制伺服电机的[9]。本实验选用的是80ST-M02430交流伺服电机和AASD15A伺服驱动器,其技术规格如表1和表2所示。

表1 80ST-M02430交流伺服电动机技术规格
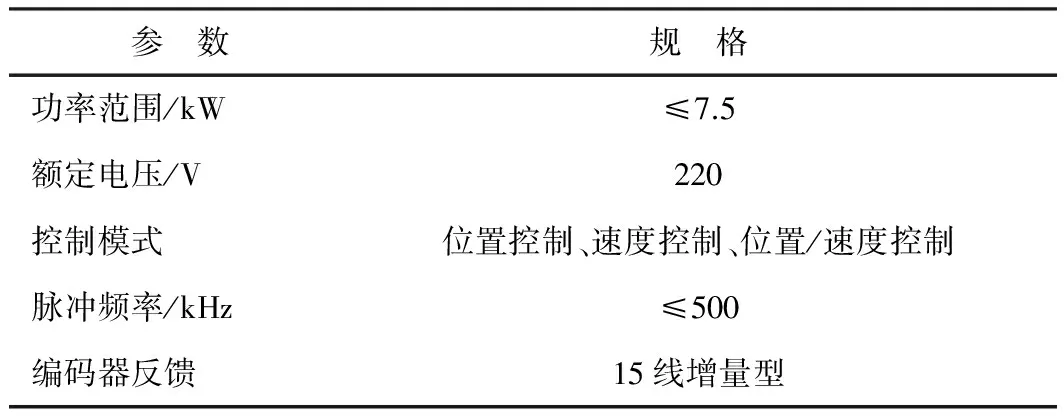
表2 AASD15A交流伺服驱动器技术规格
交流伺服电机额定电压为常用的市电220 V,功率在交流伺服电机中属于小功率型,体积较小;驱动器则是与交流伺服电机同一生产厂家的、功率相匹配的驱动器。这里驱动器的控制模式选用位置控制,为一种常见的、易用的、成本较低的驱动器控制模式,一般都能够满足实际机电一体化系统的控制需要。选用的设备既能达到让学生学会典型交流伺服系统的目的,而且使用方便、价格适中。
1.2 PLC控制的交流伺服电机的理论基础
实验中的PLC控制器实质就相当于图1中的交流伺服驱动系统的上位机,为交流伺服驱动器提供外部的控制信号。这里驱动器的控制模式选用位置控制,则PLC则必须选择能够输出脉冲控制信号的脉冲输出型PLC,而非继电器输出型的PLC。本实验中直接利用PLC输出的高速脉冲信号实现交流伺服系统的简单控制。本实验选用的PLC型号为FX1N-24MT,是日本三菱公司生产的功能强大的微型PLC,能提供输入输出总点数为24点(输入14点、输出10点),能同时输出2点100 kHz脉冲,PLC配备有7条特殊的定位指令,包括零返回、绝对位置读出、绝对或相对驱动以及特殊脉冲输出控制[10]。
2 实验开发与设计
2.1 交流伺服驱动器的设置
在交流伺服电机及其驱动器连接PLC之前,必须通过其操控面板设定好驱动器参数,并且在修改后需写入保存,重启后方能生效。因此,学生必须熟悉驱动器操控面板的操作。本实验中必须设置的参数如表3所示。
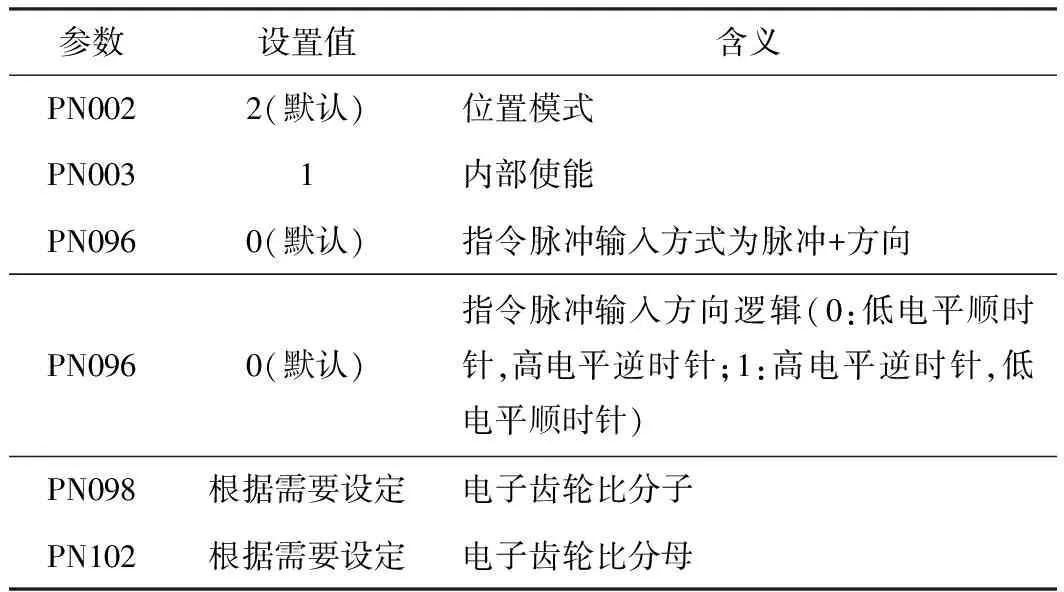
表3 交流伺服驱动器的参数设置
(1)
PN098为电子齿轮比分子,出厂默认值为1,取值范围为1~32 767;PN102为电子齿轮比分母,出厂默认值为1,取值范围为1~32 767。比如欲设置交流伺服电机5 000个脉冲转1圈,则电子齿轮比为2,所以PN098应设为2,PN102应设为1;设置交流伺服电机10 000个脉冲转1圈,则电子齿轮比为1,所以PN098应设为1,PN102应设为1,此为出厂默认值。熟悉并设置好电子齿轮比,在后续编程中才能对应地准确控制交流伺服电机的转速和位移,从而保证实验安全。
2.2 PLC控制程序的编写
学生需在计算机上自行安装PLC编程软件(如GX Works 2),并且正确设置COM通信口,通过编程电缆实现与PLC的通信,能够顺利读取PLC中原来的程序。在PLC控制交流伺服电机中,主要通过(D)PLSY和(D)PLSR两个高速脉冲处理指令实现电机指定速度运行、单轴快速定位和指定的加减速动作。
(D)PLSY指令用于产生指定数量的脉冲。通过在程序中使用(D)PLSY指令可以控制交流伺服电机以恒定转速转动指定圈数,实现交流伺服电机的单轴快速定位。其指令格式如图2所示[11]。
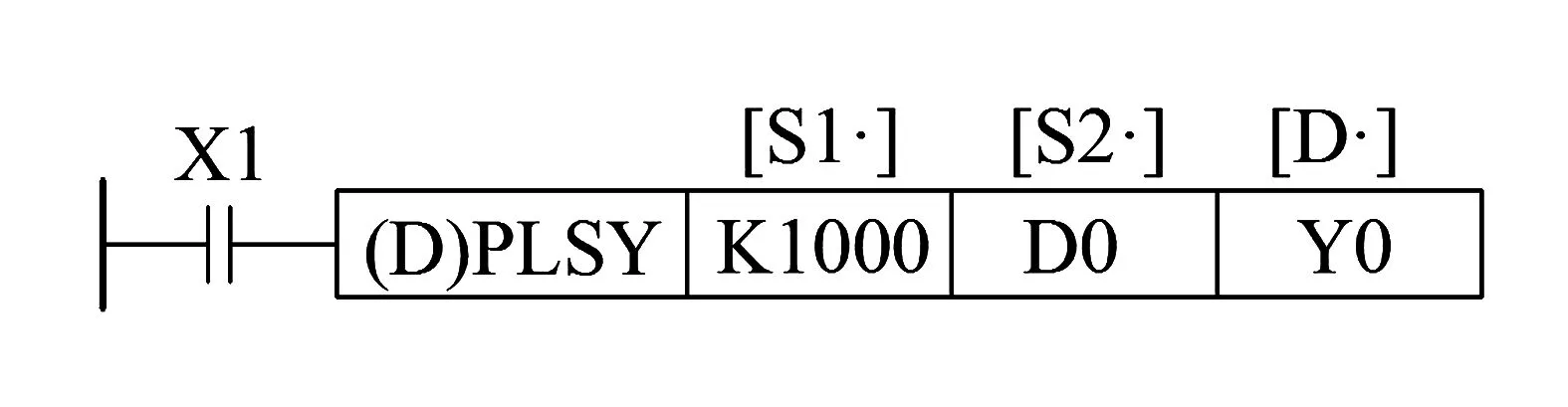
图2 脉冲输出指令(D)PLSY
关于(D)PLSY指令格式的说明:
(1) 图2中[S1·]指定脉冲频率。对于FX1N系列PLC,用16位指令PLSY时,最高输出频率为32 767 Hz;用32位指令DPLSY时,最高输出频率为20 kHz。实验中,交流伺服电机是位置控制也就是脉冲控制模式,是通过脉冲频率控制电机的转速,所以[S1·]中的参数就决定了电机的转速。但电机实际转速还需配合伺服驱动器中所设定的电子齿轮比进行计算,即电机每一圈所设定的对应的脉冲数,才能得出电机的实际转速(r/min)。
(2) 图2中[S2·]指定脉冲数量。因为交流伺服电机为脉冲控制模式,所以[S2·]中的参数就决定了电机的位移。类似于[S1·],电机的实际位移也要通过伺服驱动器中所设定的电子齿轮比进行计算,才能得出电机实际转过的圈数。
(3) 图2中[D·]指定脉冲输出元件号。对于FX1N系列PLC,其输出元件号只能为Y0或者Y1。图3所示是含有DPLSY指令的程序示例。

图3 含有(D)PLSY指令的程序示例
在图3所示程序中,DPLSY指令的[S1·]的值为K10000,则表示输出脉冲的频率为10 000 Hz,若驱动器设定的电子齿轮比为2,交流伺服电机5 000个脉冲转一圈,每秒转过10 000/5 000=2圈,则指定了电机的转速为120 r/min;[S2·]的值为K30 000,电机共转30 000/5 000=6圈;脉冲输出元件为Y0,方向信号输出元件为Y2,为低电平,电机顺时针转动。
(D)PLSR是带加减速功能的脉冲输出指令。通过在程序中使用(D)PLSR指令可以控制交流伺服电机以较平稳的速度启动或者制动,可以用来减小对机械零部件的冲击或者使得在转速变化过程中容易采集相关数据[12]。其指令格式如图4所示[11]。
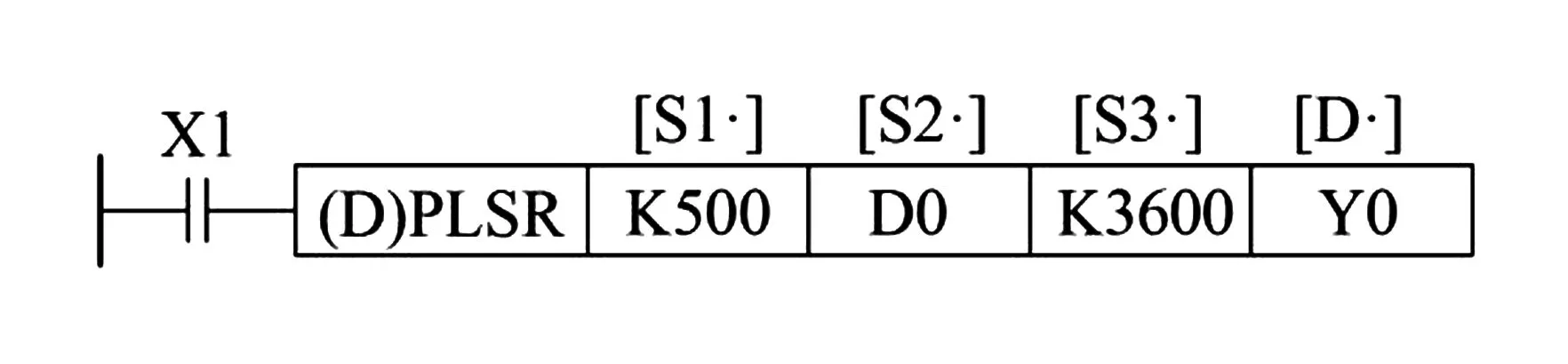
图4 脉冲输出指令(D)PLSR
(D)PLSR指令按[S1·]指定的最高频率分10级减速,达到[S2·]指定的输出脉冲数后分10级减速。关于(D)PLSR指令格式的说明:
(1)[D·]指定脉冲输出元件,与(D)PLSY指令类似,只能指定Y0或者Y1;
(2)[S1·]设定对应电机的最高转速的最高频率,对于FX1N系列PLC最高可设为100 kHz,并且必须为10的倍数,实际电机转速的计算与上述使用(D)PLSY指令类似;
(3)[S2·]设定总输出脉冲数,使用16位指令PLSR时,设定最大值为32767,使用32位指令DPLSR时,设定最大值为2 147 483 647;
(4)[S3·]设定加减速时间,单位为ms,最大值为5 000 ms,并且还需满足下列公式
(2)
2.3 实验电气连线
实验的电气连线主要分为2部分。一部分是交流伺服电机与其驱动器连线,即完成如图1所示的交流伺服电机系统连接。具体连接如下:
伺服驱动器有3条电源线引脚,L1、L2、L3。对于小于1 000W的交流伺服电机,一般接单相220V,即接L1、L2即可。电机线U、V、W、E和驱动器的U、V、W、地引脚一一对应连接。将厂家提供的电机编码器线与驱动器CN3直接相连。这部分的连线一般是连接好后,以后无论采用何种上位机对交流伺服电机进行控制,都不需要改变的。实验的电气连线另外一部分是伺服驱动器余下的CN2与上位机PLC的连接。CN2为交流伺服系统的控制信号输入接口。CN2接口一共包含25个引脚,采用位置控制模式的话只用到其中少数几个引脚。PLC输出的是24V脉冲信号,按照伺服驱动器说明书,如图5所示连接至PLC。其中的方向信号引脚,按照默认逻辑如果接到24V高电平的信号或者悬空,则电机逆时针转动,若接到低电平信号0V,则电机顺时针转动。

图5 驱动器接口与PLC连线
2.4 实验结果与注意事项
实验中,通过编制含有(D)PLSY和(D)PLSR两个指令的程序,均能使得交流伺服电机动作,并且根据程序中设定的参数及驱动器设定的电子齿轮比计算得到的转速,与驱动器操控面板上显示的转速一致。根据程序中设定脉冲数与电机转过的圈数一致,加减速时间也一致。用(D)PLSR指令实现了交流伺服电机如图6所示的梯形加减速控制。实验结果与预期控制结果一致。

图6 梯形加减速曲线
实验中必须注意的是,所用(D)PLSY和(D)PLSR指令对某个输入元件都只能使用一次;PLC的输出端子需要完整的回路,才能有电流流通或对控制元器件施加电压,所以使用到的输出元件的COM口需要短接。另外还需注意实验的组织形式:
(1) 实验分小组进行,小组人数以4人左右为宜,小组内分工须严格明确。
(2) 为提高学生的创新实践能力,实验中所有连线都须学生亲手连接,指导教师不给定参考程序,由学生自己灵活自由编制程序。实验过程中,指导教师主要是对连线结果进行把关,保证实验安全,以及指定学生必须要实现的电机动作。
3 结语
通过开发交流伺服电机的PLC控制综合性实验,让学生设计并且实现了由PLC和交流伺服电机及其驱动器组成的机电控制系统,使学生熟悉了交流伺服电机的控制方法,掌握了PLC控制交流伺服电机程序的编写及相关软件。自己动手连线、操作驱动器等使学生也学到了一些教科书上没有的知识,激发了学生对PLC控制设计的兴趣,为其将来从事相关机电一体化系统设计工作奠定了基础。
References)
[1] 莫会成,闵琳,王健,等.现代高性能永磁交流伺服系统综述:永磁电机篇[J].微电机, 2013(9):1-10,40.
[2] 寇宝泉,程树康.交流伺服电机及其控制[M].北京:机械工业出版社, 2008.
[3] 庄丽.机器人系统中交流伺服电机控制研究[J].制造业自动化,2015(7):61-62,83.
[4] 吴子英,刘宏昭,王胜,等.数控机床进给伺服系统研究进展[J].振动与冲击,2014(8):148-155,160.
[5] 张建民.机电一体化系统设计[M].北京:高等教育出版社,2014:101-104.
[6] 冯清秀.机电传动控制[M].5版.武汉:华中科技大学出版社,2011.
[7] 司鹏辉.步进电机和交流伺服电机性能综合比较[J].电子测试,2015(13):85-86,47.
[8] 孙兴伟,侯广政,王可,等.交流伺服电机速度控制模式实现方法的研究[J].机床与液压, 2012(15):54-55,59.
[9] 胡鹏.交流伺服电机的高精度恒转矩控制系统[J].机床电器,2012(5):23-25.
[10] 廖常初.FX系列PLC编程及应用 [M]. 2版.北京:机械工业出版社,2013.
[11] 钟肇新,范建东.可编程控制器原理及应用[M].广州:华南理工大学出版社,2006: 152-157.
[12] 陈英俊.弹性流体动力脂润滑机理与实验研究[D].广州:华南理工大学,2014.
Development and design of synthesized experiment based on PLC control of AC servo motor
Chen Yingjun, Huang Chonglin
(College of Mechanical and Electrical Engineering, Guangdong University of Petrochemical Technology,Maoming 525000, China)
In order to explore the cultivating mode of application-oriented and innovative talents of mechanical engineering, and to improve the engineering practical ability of students, based on the principles of the position controlling mode of AC servo motor and high speed pulse output of PLC, the synthesized experiment based on AC servo motor and PLC control was developed and designed. The experiment contents includes the configuration of the AC servo motor driver, electrical design and connection, and the programming from the processing instructions of high speed pulse, the motor controlling to definite speed, location and acceleration or deceleration. Through the experiment, the students can consolidate and expand the knowledge from classes, motivate the learning interest and the quality of teaching is improved.
AC servo motor; PLC control; synthesized experiment
10.16791/j.cnki.sjg.2017.02.038
2016-08-17
广东省科技计划项目(2015A030401103);广东省高校实验教学示范中心建设实验研究项目(215171);广东石油化工学院创新强校项目(GYFG2016B029)
陈英俊(1979—),男,广东高州,博士,副教授,主要从事微机电系统设计、摩擦学测试方法研究.
E-mail:mechenyj@gdupt.edu.cn
TH-39
A
1002-4956(2017)2-0147-04
