基于SINAMICS S120的运动控制系统实践教学平台建设
2017-03-02谢丽蓉王忠强
谢丽蓉, 高 磊, 路 朋, 王忠强
(新疆大学 电气工程学院, 新疆 乌鲁木齐 830047)
基于SINAMICS S120的运动控制系统实践教学平台建设
谢丽蓉, 高 磊, 路 朋, 王忠强
(新疆大学 电气工程学院, 新疆 乌鲁木齐 830047)
针对运动控制系统课程实践性强的特点,在分析自动化专业教学现状的基础上,建设了基于SINAMICS S120的运动控制系统实验教学平台,以加强学生综合应用知识解决问题的能力。采用SINAMICS S120伺服驱动系统,配合WINCC及PLC-300,通过用STARTER软件对硬件调试仿真后,建立集监控、控制、运动的一体化教学平台,使学生在实践的基础上对运动控制系统及自动化专业其他课程有更深的认识和更强的实践能力。
运动控制系统; SINAMICS S120; 教学实践
“运动控制系统”是大学本科电气工程及其自动化、自动化、机械工程及其自动化等专业的重要课程。运动控制系统涵盖自动控制理论、现代控制理论、检测与变送技术、PLC控制技术和电机学知识,综合性很强,故实践教学对相关专业学生学习理论知识和解决运动控制系统问题非常重要。运动控制系统理论有许多抽象的概念、复杂的公式以及复杂的运动系统框图,使学生难以理解并对该课程产生畏惧[1-5]。
笔者提出基于SINAMICS S120的运动控制系统实践教学方法,综合利用了本校自动化专业实验室的设备,让学生通过实验对运动控制系统课程涉及的理论知识有一个更深的理解。通过搭建运动控制系统实践教学平台,对自动运动控制理论及其与实际的结合进行较全面的阐释。
1 运动控制系统的传统教学方式
运动控制系统是实践性和综合性很强的课程,涉及自动化专业大部分理论知识,所以对这门课程的教学应真正做到理论与实践相结合[6],使学生能够综合应用自动化专业所学的理论知识和现场经验。目前的本科教学广泛使用多媒体技术,并辅以实践教学,针对一门课程先进行理论传授,再进行实验验证,最后让学生到实验室实际操作。例如在运动控制系统课程教学中,教师要将电机的闭环控制、各种调速原理以及几种能量反馈形式以PPT的形式向学生传授,并辅以相关图片和视频,使学生对所学知识有一个更直观的了解。这种音/视频的教学方式可以激发学生的兴趣,使学生更容易接受,但仍不能自主实践创新。
2 实践教学平台建设
为使学生能够熟练地综合利用所学知识完成实际项目,需要建设一个运动控制系统课程实践教学平台,帮助学生巩固知识、提高实践能力[7-8]。
2.1 运动控制系统平台总体构建
运动控制系统实践教学平台主体是运动控制系统,由西门子SINAMICS S120增量型编码器伺服驱动器及其配件组成[9]。由于该系统自带控制模块,可实现简单控制,能满足运动控制系统实验的需求。为了提升学生综合应用所学知识去解决问题的能力,该实验教学平台为运动控制系统(见图1)另外增加了西门子公司生产的可编程逻辑控制器(PLC)[10]S7-300和上位组态软件WINCC。通过监控系统(组态软件)、控制系统(PLC)和运动系统(SINAMICS S120)的有机结合,使学生对整个自动化生产过程和运动控制系统有一个全面的理解,并且能将所学的知识很好地应用于实践。
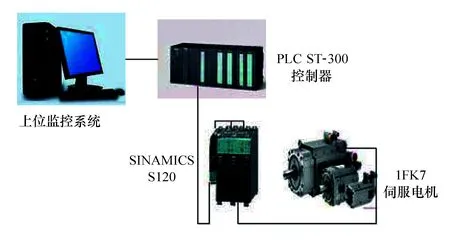
图1 自动化运动控制系统
2.2 监控系统
运动控制系统实践教学平台用到的上位组态软件是WINCC。WINCC集生产自动化和过程自动化于一体,实现了二者的整合;其通用的应用程序适合所有工业领域的解决方案;内置全过程操作和管理功能,可简单、有效地进行组态;可基于Web持续延展,采用开放性标准,集成简便;集成的Historian系统可作为IT和商务集成平台;可用选件和附加件进行扩展。
2.3 控制系统
S7-300是模拟式中小型PLC(见图2),电源、CPU和其他模块都是独立的,可以通过U形总线把电源、CPU和其他模块紧密固定在西门子S7-300的标准轨道上。每个模块都有一个插在背后的总线连接器。电源模块总是安装在机架的最左边,CPU模块紧靠电源模块。CPU的右边是可以选择的IM(通信)接口模块。
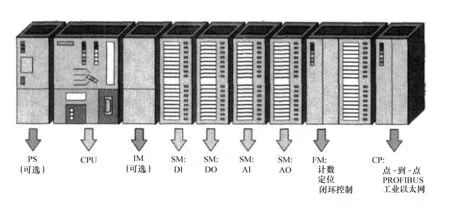
图2 西门子S7-300 PLC
对于一个控制系统的硬件设备,如果不对其编程,它就是无用的。对西门子S7-300的编程用的是西门子公司开发的STEP 7编程软件,西门子STEP 7是用于SIMATIC S7-300/400站创建可编程逻辑控制程序的标准软件,可使用梯形图逻辑、功能块图和语句表进行编程操作。
2.4 运动系统
SINAMICS是全集成自动化系统(TIA)中又一个核心组成部分。SINAMICS的所有型号都基于相同的技术平台。共同的硬件和软件部件以及标准化的设计、组态和调试工具可以保证所有部件的高度集成。SINAMICS驱动系统之一的SINAMICS S120采用模块化设计,可以提供高性能的单轴和双轴驱动,具有广泛的工业应用价值[11]。由于具有很高的灵活性能,SINAMICS S120可以很好地满足用户对驱动系统轴数量和性能的要求。S120运动控制系统如图3所示。
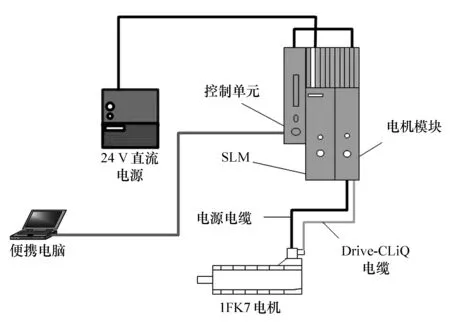
图3 运动控制系统
西门子伺服控制系统的主要组成部分是控制单元CU320、非调节型电源模块、3A双轴电机模块和1FK7伺服电机等。此系统可以通过速度控制、转矩控制、位置控制对伺服电机进行精确控制。
控制单元CU320是驱动系统的“大脑”,负责控制和协调驱动系统中所有的模块,完成各轴的电流环、速度环甚至位置环的控制。同一个CU320控制的各轴能相互交换数据,即任意一根轴能够读取控制单元上其他轴的数据,这一特征广泛被用作多轴之间的简单的速度同步。根据连接外围I/O模块的数量、轴控制模式、所需的功能以及CF卡的不同,一块CU320能够控制轴的数量也不同。
电源模块即整流或整流/回馈单元,它是将三相交流电整流成直流电,然后供给各电机模块,有回馈功能的模块还能够将直流电回馈给电网。
电机模块(即逆变单元)又分为单轴电机模块和双轴电机模块。电机模块和主控单元之间通过DRIVE-CLIQ接口进行快速数据交换。此平台使用的是3 A双轴电机模块,给伺服电机1FK7供电。
3 实践平台仿真验证
STARTER软件是用来对西门子SINAMICS系列产品进行调试、参数修改的工具,它功能强大,使用方便,因此应用十分广泛。PC机通过STARTER软件与S120驱动系统的通信方式主要有3种,即PROFIBUS-DP通信、以太网通信和RS-232串口通信。由于运动控制系统实践教学平台使用的是CU320控制单元,其本身只有RS-232串口和PROFIBUS-DP接口,故可以用串口通信或PROFIBUS。
STARTER软件对S120的调试首先要通过对系统的配置,配置流程如图4所示。
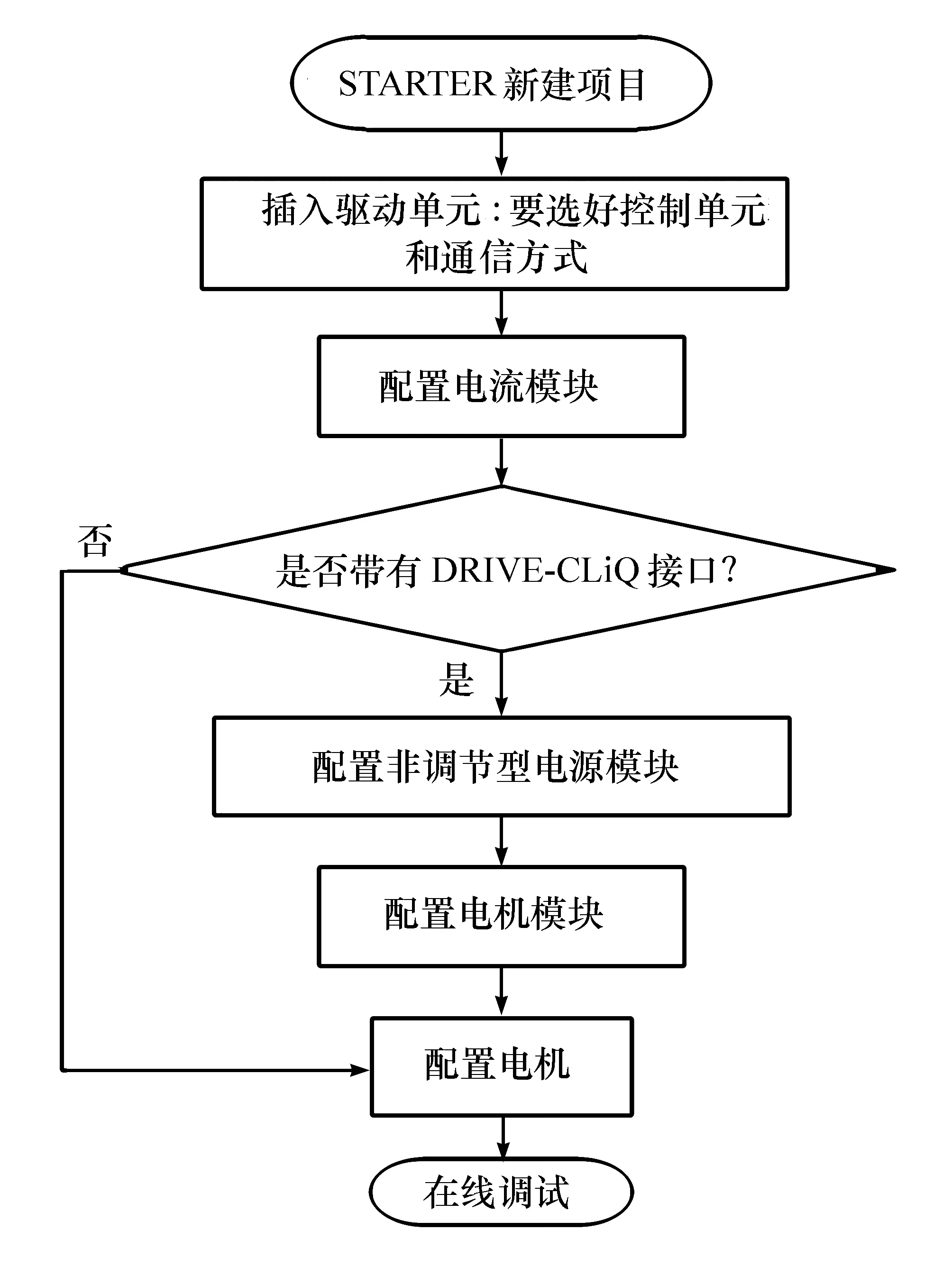
图4 S120配置流程图
系统配置完成后,就可以用STARTER软件对S120进行调试。调试功能包括数据跟踪记录、功能函数发生器、伯德图测量、控制器自动优化等。
3.1 数据跟踪记录
此项调试功能可以跟踪数据信息,可以清晰地看到系统运行过程中各参数的变化。速度滤波器前加入正弦信号时的速度响应曲线如图5所示,斜坡信号作用下的速度响应曲线如图6所示。
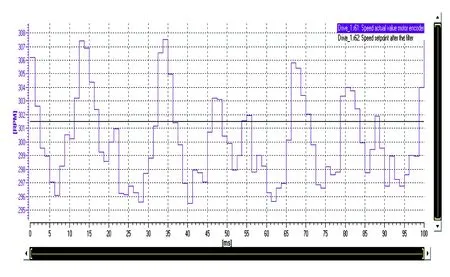
图5 正弦信号作用下的速度响应曲线
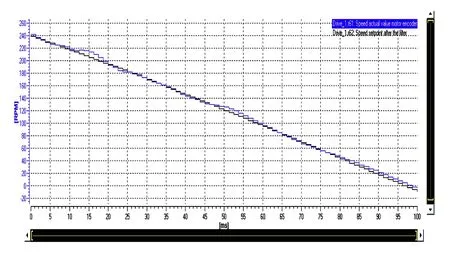
图6 斜坡信号作用下的速度响应曲线
在图5和图6中可以看出:跟踪记录的是伺服轴的设定速度和实际速度,对应的参数分别是r61和r62。
3.2 伯德图测量
伯德图测量主要是为了确定系统的稳定性和系统的带宽。图7为系统的伯德图,其中速度控制器中参数P=0.03,Reset time=4 ms:
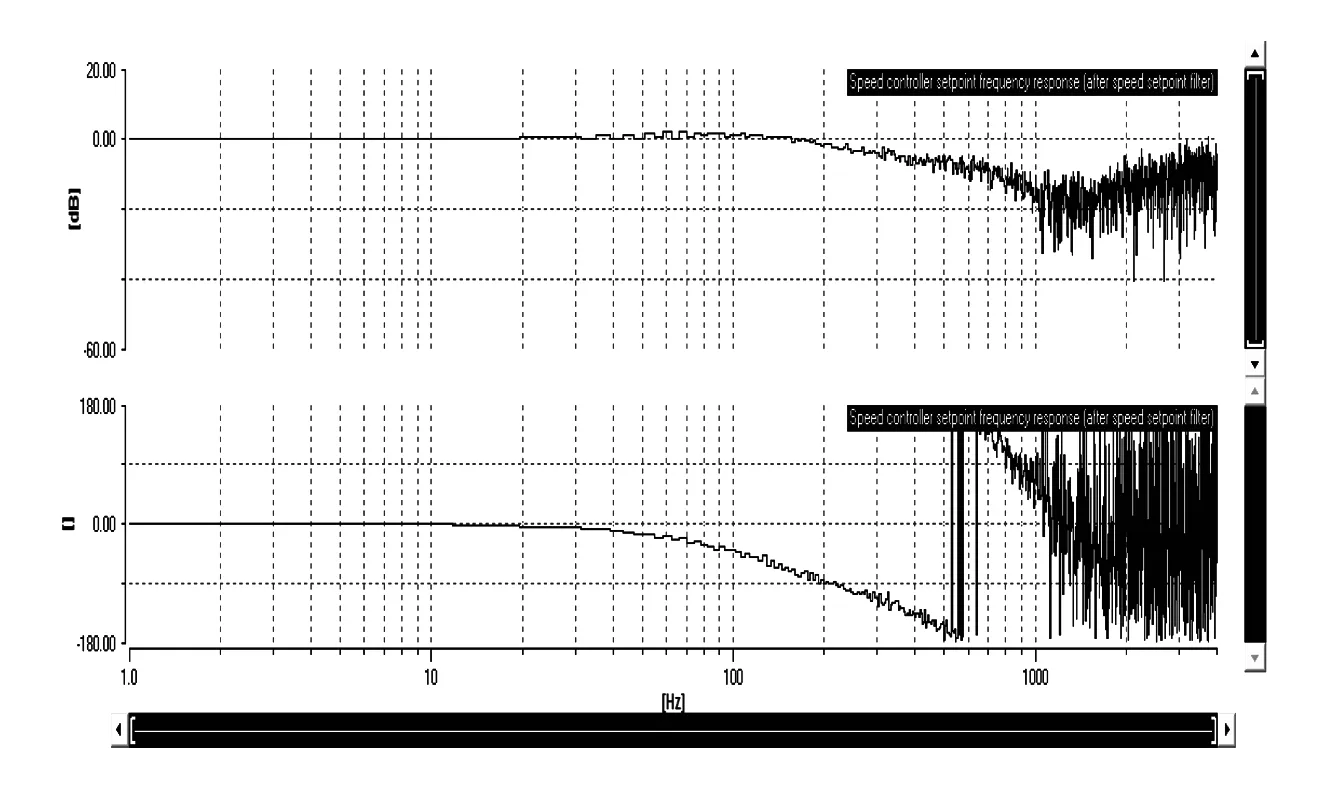
图7 系统的伯德图
当速度控制器中参数P=0.03,Reset time=9 ms,伯德图如8所示。
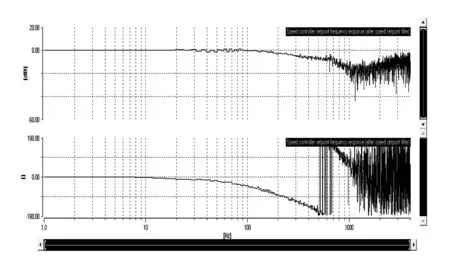
图8 不同参数下的伯德图
从伯德图可以看出系统的稳定性以及系统的带宽。如果改变速度控制器的参数,在伯德图中系统的带宽会发生变化;当速度控制器参数选取的合适,带宽也会比较合适。
3.3 控制器的自动优化
控制器的自动优化,即通过在线调试,使各环的PID控制参数达到最优,使系统能更好地运行。
软件对电机的正反转机械特性、电流闭环的辨识、速度的计算都进行了自动优化。图9是优化后速度控制器的参数值。
通过控制器的自动优化,速度控制器的参数亦将得到优化。其中参数P=0.038,Reset time=6.99 ms。
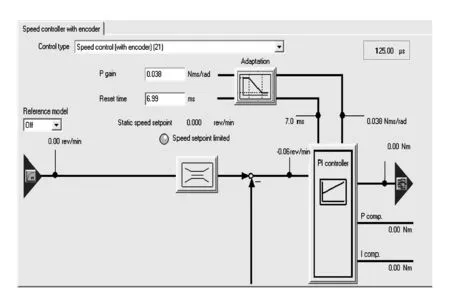
图9 速度控制器参数值
4 结语
基于SINAMICS S120搭建了较为全面的运动控制系统实践教学平台,引入了组态软件WINCC、编程软件STEP 7、S120调试软件STARTER,通过仿真测试验证了平台的可行性和实用性。该平台使学生对自动化控制系统的硬件和软件有了较全面的认识,对PLC编程以及运动控制系统有了更深的理解,真正做到理论与实践相结合,提高了实践能力和就业竞争力。
References)
[1] 包广清,吴延明,杨新华.面向工程实践的运动控制系统综合训练改革[J].实验技术与管理,2014,31(4):150-153,185.
[2] 陈卫东,韩兵,杨明,等.运动控制系统课程体系改进与创新[J].实验室研究与探索,2013,32(9):157-159.
[3] 木合亚提·伊克山.“电力拖动自动控制系统”课程实验的改革[J].实验室研究与探索,2010,29(12):131-133.
[4] 印江,白学林,来长胜.控制装置专业实验室系统建设探索[J].实验室研究与探索,2014,33(12):238-241,272.
[5] 史成城,谢丽蓉,张丹.运动控制系统实验软件开发平台[J].实验技术与管理,2013,30(1):119-121.
[6] 韩明,苗长云,白华.基于VC++的超声检测运动控制系统的设计及实现[J].天津工业大学学报,2015(5):63-66.
[7] 李俊峰,潘海鹏,杨晔,等.自动化专业控制系统课程群建设与实践改革[J].实验室研究与探索,2013,32(11):460-464.
[8] 朱艺锋,郑征,余发山,等.专业课程“运动控制系统”的课堂教学方法探析[J].实验室研究与探索,2013,32(11):374-376,388.
[9] 刘大炜,白国振,胡斌. 基于西门子SIMOTION D运动控制系统的齿轮同步研究[J]. 机械设计,2013(12):15-18.
[10] 陈婵娟,薛恺,常美蓉,等.基于PLC的步进电动机单双轴运动控制的实现[J].机械设计与制造,2009(3):178-180.
[11] 郁林聪,吴达.基于SINAMICS S120的变速器试验台加载控制系统设计[J].制造业自动化,2010(10):219-220.
Construction of practical teaching platform for motion control system based on SINAMICS S120
Xie Lirong, Gao Lei, Lu Peng, Wang Zhongqiang
(School of Electric Engineering, Xinjiang University, Urumqi 830047, China)
This paper introduces the motion control system based on SINAMICS S120 experimental teaching platform. Practical course for strong features of motion control, based on the analysis of current status of automation specialty teaching, in order to strengthen students’ theoretical knowledge, to improve their practical technical level, and strengthen their comprehensive application ability of knowledge to solve the problem, introduces SINAMICS S120 Siemens servo drive system, cooperates with WINCC and PLC-300, by using the software of STARTER for hardware debugging after the simulation, and establishes a monitoring-controlling-moving integrated teaching platform, to make the students having a deeper understanding based on the practice for motion control and the professional knowledge in all subjects.
motion control system; SINAMICS S120; teaching practice
10.16791/j.cnki.sjg.2017.02.034
2016-09-06 修改日期:2016-11-06
国家自然科学基金项目(51264036);新疆大学“运动控制系统”精品课程建设项目(XJU201202)
谢丽蓉(1969—),女,湖南衡阳,硕士,副教授,主要从事控制系统的分析、教学与研究工作.
E-mail:wzywwwxr@163.com
TP273
A
1002-4956(2017)2-0132-04