物料分拣虚拟仿真实验系统设计
2017-03-02许丽川刘佳峰
许丽川, 刘佳峰
(电子科技大学 机械电子工程学院, 四川 成都 611731)
物料分拣虚拟仿真实验系统设计
许丽川, 刘佳峰
(电子科技大学 机械电子工程学院, 四川 成都 611731)
为解决实验实训课程中缺乏大型工业设备的问题,基于Virtual Universe Pro(VUP)设计了一种虚拟仿真物料分拣实验系统。该实验系统的物料分拣平台三维仿真模型能够模拟实际物料分拣的动作;能将虚拟物料分拣平台与控制器S7-300连接,在STEP7编程环境中进行物料分拣实验程序的设计、调试和运行。系统测试表明,该实验系统可以完成铝质物料、铁质物料、白色塑料以及红色塑料等4种物料分拣的基本功能。
物料分拣系统; 虚拟仿真实验; VUP; 可编程逻辑控制器
1 概述
目前,虚拟仿真技术在很多领域都有广泛的应用。除物理仿真之外,仿真技术大多是在PC机上实现的。数字仿真对实际系统进行抽象并用数学关系加以描述,以得到系统的数学模型,然后在计算机上对数学模型编写可执行程序进行仿真实验。半实物仿真,即硬件在回路仿真(hardware-in-the-loop),是指将一部分实物对象用数学模型替代,而其他部分直接用物理模型或者实物接入仿真系统[1]。虚拟仿真技术(virtual reality,VR)是目前仿真技术的一个重要方向。虚拟仿真技术是利用计算机技术、网络通信技术、人工智能技术、自动化控制技术、仪器仪表与测量技术等交叉产生的一种现代信息技术,是用一个虚拟的系统模仿真实系统的技术[2]。各类仿真技术各有优势和长处,应用在各种不同的研究环境中[3-8],也逐渐在高校实验实践教学和创新创业训练中得到认可和推广[9-14]。
仿真技术在高校PLC实验室建设中逐渐得到了应用。在PC机上构建真实设备的3D模型,通过虚拟控制平台和PLC之间的通信,实现PLC的真实I/O对于虚拟对象的控制[ 9]。使用虚拟对象代替实际工业设备,解决了大型工控设备价格昂贵、硬件维护复杂、有“安全性”隐患等问题,推进了实验教学信息化建设和实验教学资源的开放共享,也助推了实验实训慕课的建设。
笔者基于Virtual Universe Pro(VUP)设计了一种虚拟的物料分拣平台,并与S7-300 PLC连接,编程实现PLC对虚拟物料分拣平台的控制,实现基本的物料分拣功能。
2 虚拟物料分拣实验系统的功能设计和总体结构
2.1 虚拟物料分拣实验系统的功能设计
虚拟物料分拣实验系统简化了系统功能,其总体结构和功能包括:
(1) 虚拟物料分拣平台由滚轮式传送带、传感器、物料收集系统等构成,其主要功能是通过3级传送带实现铝质物料、铁质物料、白色塑料和红色塑料等4类物料的分拣;
(2) 实验系统设置虚拟HMI,包括启动/停止按钮,并且在每一次物料分拣结束后按下暂停键停止系统运行,按下恢复键后系统可继续运行;
(3) 在虚拟物料分拣实验系统中,当开始分拣一个物料时,其他物料在上料传送带上等待,当上一个物料分拣结束后,上料传送带才继续运转;
(4) 实验系统设置状态指示灯,当物料在上料过程中和系统在暂停的状态下指示灯为黄色;当物料在正常分拣过程中指示灯为绿色。
系统中的虚拟物料分拣平台功能示意图如图1所示,图中空心粗箭头表示物料分拣的流向。
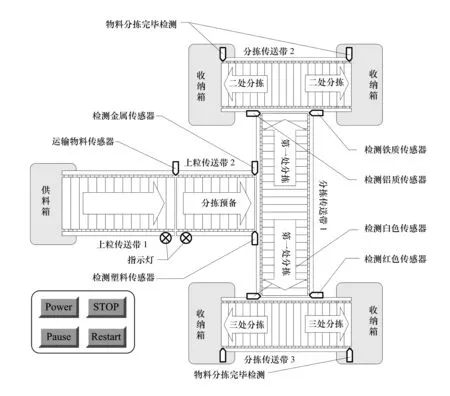
图1 物料分拣平台功能示意图
第一次分拣可将物料分为金属物料和塑料2类。当检测结果为金属物料时,PLC控制第二级传送带向传送方向左侧传送;当检测结果为塑料时,PLC控制传送带向传送方向右侧传送。第二次分拣将金属分为铁和铝,将塑料分为红色和白色。二次分拣是通过PLC控制第三级传送带的传送方向来实现的。
分拣系统在单次分拣后可以暂停,也可以继续工作。系统在遇到突发状况时暂停工作,以保护系统和人身安全。当对某物料进行分拣时,其余待分拣的物料要等待,以防止在分拣过程中物料与物料的碰撞,造成分拣失败。
2.2 虚拟物料分拣实验系统的总体结构
实验系统的总体结构如图2所示。系统主要包括S7-300可编程逻辑控制器(PLC)和PC机两部分,通过基于PROFINET的工业以太网经交换机X005进行通信。
S7-300是模块化的中小型PLC,适用于中等性能的控制要求,虚拟物料分拣实验系统的S7-300控制器选用CPU 315F-2 PN/DP。PC机实现了PLC编程器和虚拟物料分拣平台的双重功能。编程环境为STEP7,虚拟物料分拣平台是通过Virtural Universe Pro 3D仿真软件来构建的。3D仿真模型通过连接的三维仿真器与外部控制器(或嵌入式虚拟控制器)通信,Virtural Universe Pro(VUP)就能够在完全虚拟的环境下再现设备或机器在真实世界中的工作情况。
虚拟物料分拣平台主要包括传送带运输模块、分拣模块、循环模块、虚拟人机界面模块和状态指示灯等5个模块。
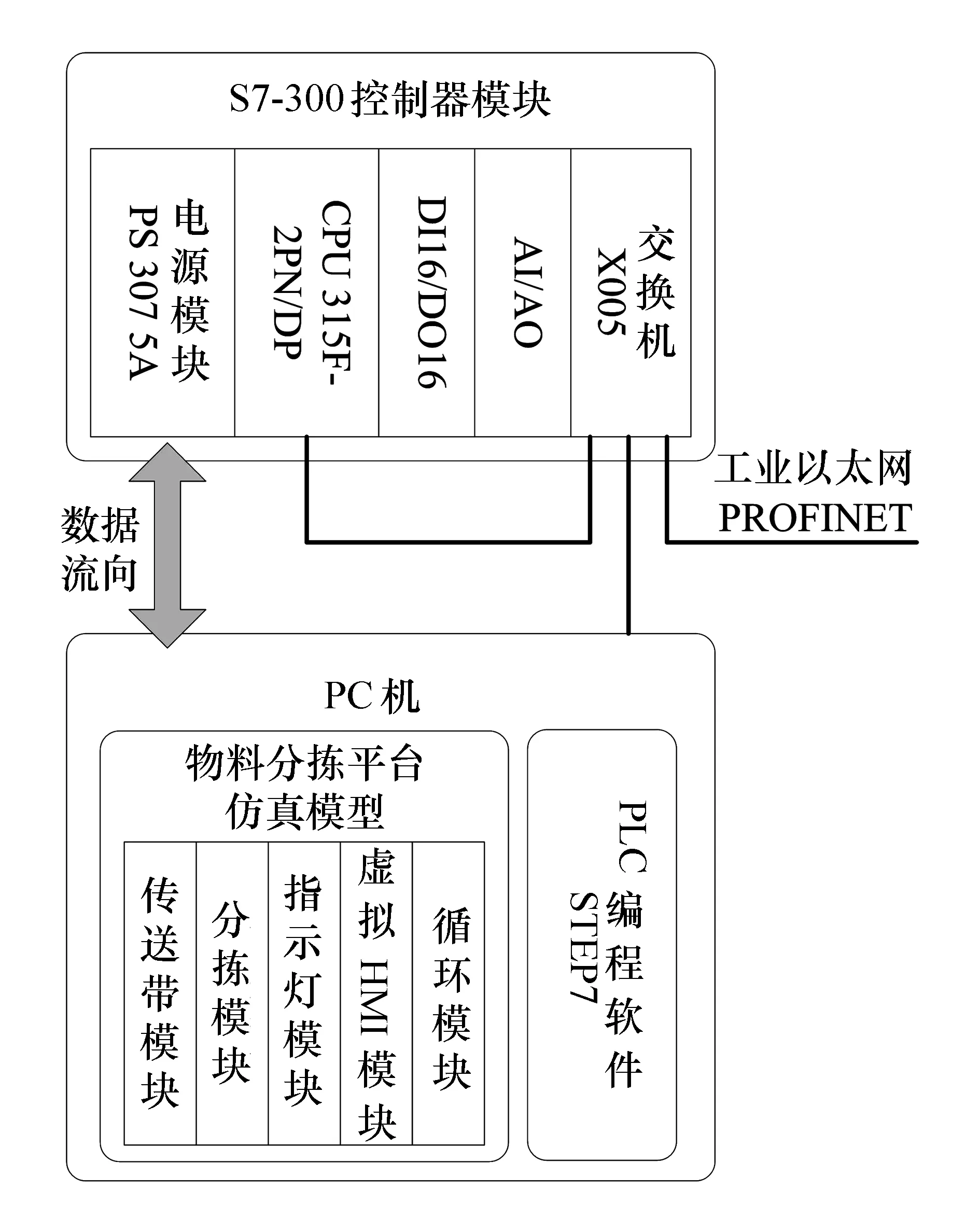
图2 虚拟物料分拣实验系统结构图
3 虚拟物料分拣平台仿真模型设计
3.1 构造实验系统仿真模型的主要步骤
认识虚拟物料分拣平台的构造是学生实验实践的内容之一,它要求学生了解工业控制平台的实际结构(执行器件、传感器)及其控制原理。因此,虚拟物料分拣平台的搭建力求步骤简单、操作简便、物理概念明了。在VUP中搭建仿真模型的步骤如下:
(1) 调用VUP库中的模型,例如传感器、滚轮式传送带、指示灯、箱体等,将其拼装成所需要的物料分拣平台的模型;
(2) 为传送带、箱体、机架等3D元件添加辅助动作和对应的运动区域,使其自身具有动态属性;
(3) 为元件添加动作,使3D资源能够模拟实际资源的行为,例如执行机构和传感器;
(4) 为实验系统中与外部连接的3D元件的动作添加变量;
(5) 当VUP内的虚拟系统能够连接外部控制器S7-300时,进行联合仿真。
3.2 虚拟物料分拣平台的设计及控制原理
根据前述系统功能设计及图1,设计出分拣平台的完整3D模型,如图3所示。
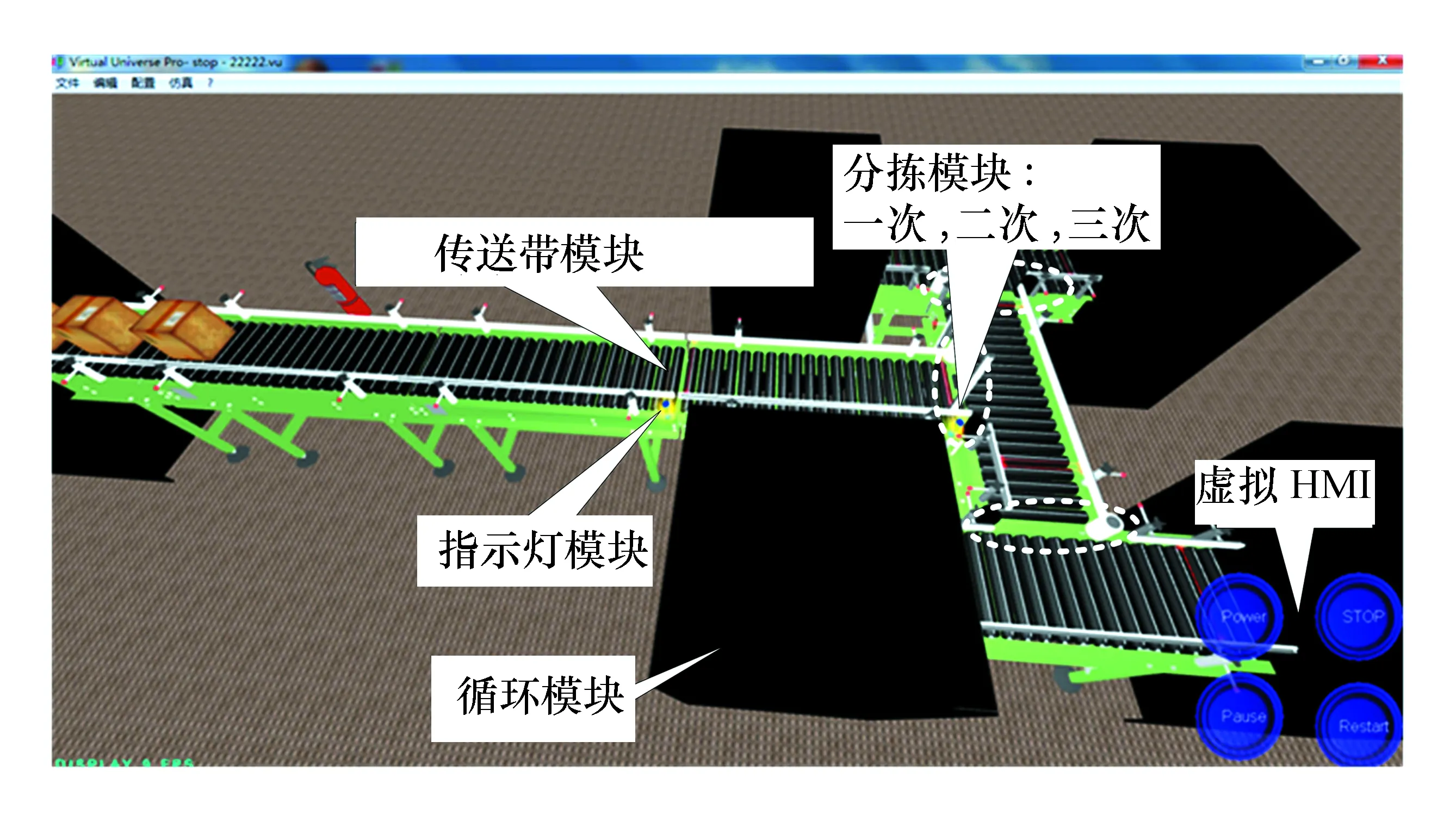
图3 虚拟物料分拣平台
3.2.1 传送带运输模块
传送带运输模块包括每一级滚轮式传送带和旁边的支架结构,主要完成物料的运输。5个传送带模块都使用相同的3D元件,但分别由不同的PLC变量控制,在系统运行中是相互独立的。
滚轮传送带的动作类型选择“力与转矩”,运动路径选择“X方向/旋转型/一对相互作用力”。这样,滚轮式传送带的动力就来源于给滚轮施加的一个转矩,然后联动其他滚轮一起转动,实现传送带的前进、后退和停止运动。
将传送带的动作与S7变量进行连接,就可以实现用PLC变量控制传送带的前进、后退和停止。如图4所示,传送带前进和后退由Q0.0控制,传动带停止由Q1.5控制。
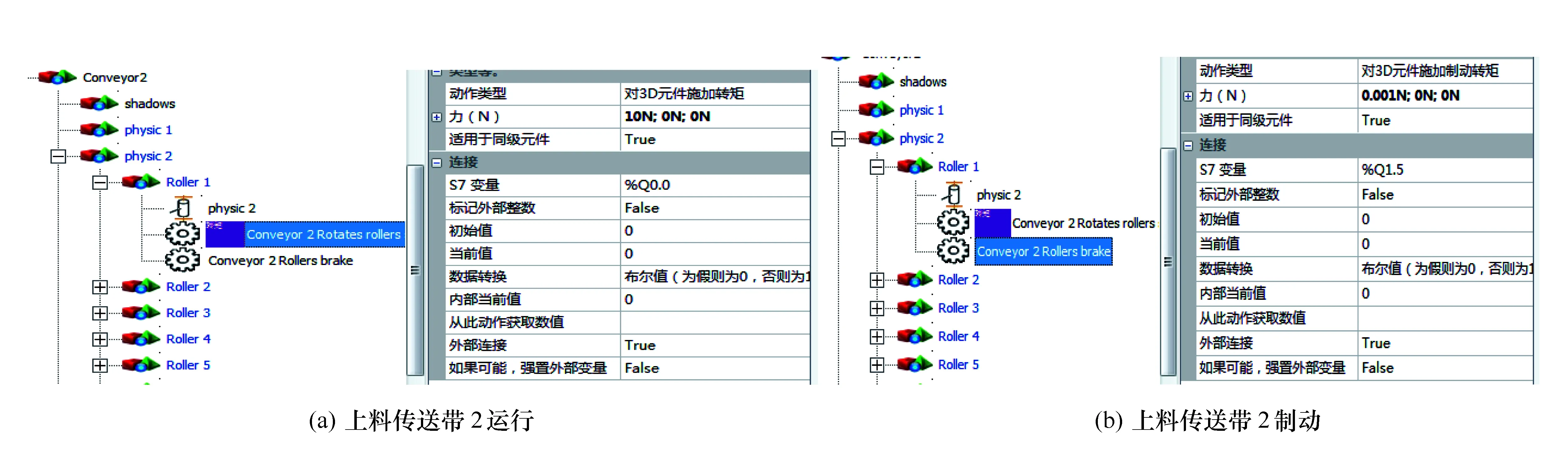
图4 传动带动作与S7变量的连接
3.2.2 分拣模块
分拣动作的检测装置是传感器。分拣模块包括不同类型的传感器,主要完成物料类别的辨识并反馈信号。共有3个分拣处,每处设置2个传感器。
关于传感器元件的动作类型,应选择测试类型中的“检测与其他对象的碰撞”。VUP仿真软件中的传感器的辨别依据是传送过来的物体的名称。因此,实际检测物料的依据是判别是否与物料碰撞并且是否是对应的物料。
4类虚拟物料的名称分别定义为:box11,box12,box21,box22。第一分拣处的两个传感器设置“其他元件名称”参数分别为box1和box2,可将4类虚拟物料先进行金属物料和塑料的分拣;第二分拣处两个传感器设置“其他元件名称”参数分别为box21和box22,可以模拟铁质和铝制物料的分拣;第三分拣处两个传感器设置“其他元件名称”参数分别为box11和box12,可以模拟红色和白色塑料物料的分拣。
最后,通过与S7变量的连接实现PLC对传感器信号的接收。
3.2.3 循环模块
循环模块主要实现两个功能:
一是检测物料是否分拣完毕,以确定是否进行下一个物料的分拣,通过PLC程序实现;
二是持续地将物料送上传送带,使物料分拣持续运行。
在物料传送的起始位置和4个物料传送终端分别放置一个黑色箱体(departure),然后调用4个传感器置于4个物料传送带的终端。4个传感器的动作设置与分拣传感器相同,在此不再赘述。
物料终端的4个黑色箱体的动作类型设置为“检测与其他3D元件碰撞”,当检测到碰撞且物料名称相符时,其“内部当前值”参数置位为1。同时,在物料中定义return from departure动作,该动作的连接选项“从此动作获取参数”设置为黑色箱体的动作名称。这样,当黑色箱体接收到分拣完毕的物料后,该物料的return from departure动作也为1,这个物体会回到原来的位置,重新进入分拣流程,实现物料的收集及循环。
3.2.4 虚拟人机界面模块
人机界面模块包括Power、Stop、Pause、Restart 4个按钮,功能是实现对虚拟物料分拣平台的控制。将它们的动作与外部控制器中的S7变量相连,则按钮的动作就转变为将S7变量值的变化送入控制器,控制PLC程序的执行。
3.2.5 系统状态指示灯模块
本系统的状态指示灯模块由黄色指示灯和绿色指示灯组成,用于提示虚拟物料分拣平台的运行状态。在运输物料过程中和暂停时黄色指示灯亮;正常分拣过程时绿色指示灯亮。
4 基于虚拟对象的物料分拣实验系统软件设计
4.1 S7变量分配表
将虚拟物料分拣平台中各个元件的动作与PLC的S7变量相连,得到变量分配表(见表1)。
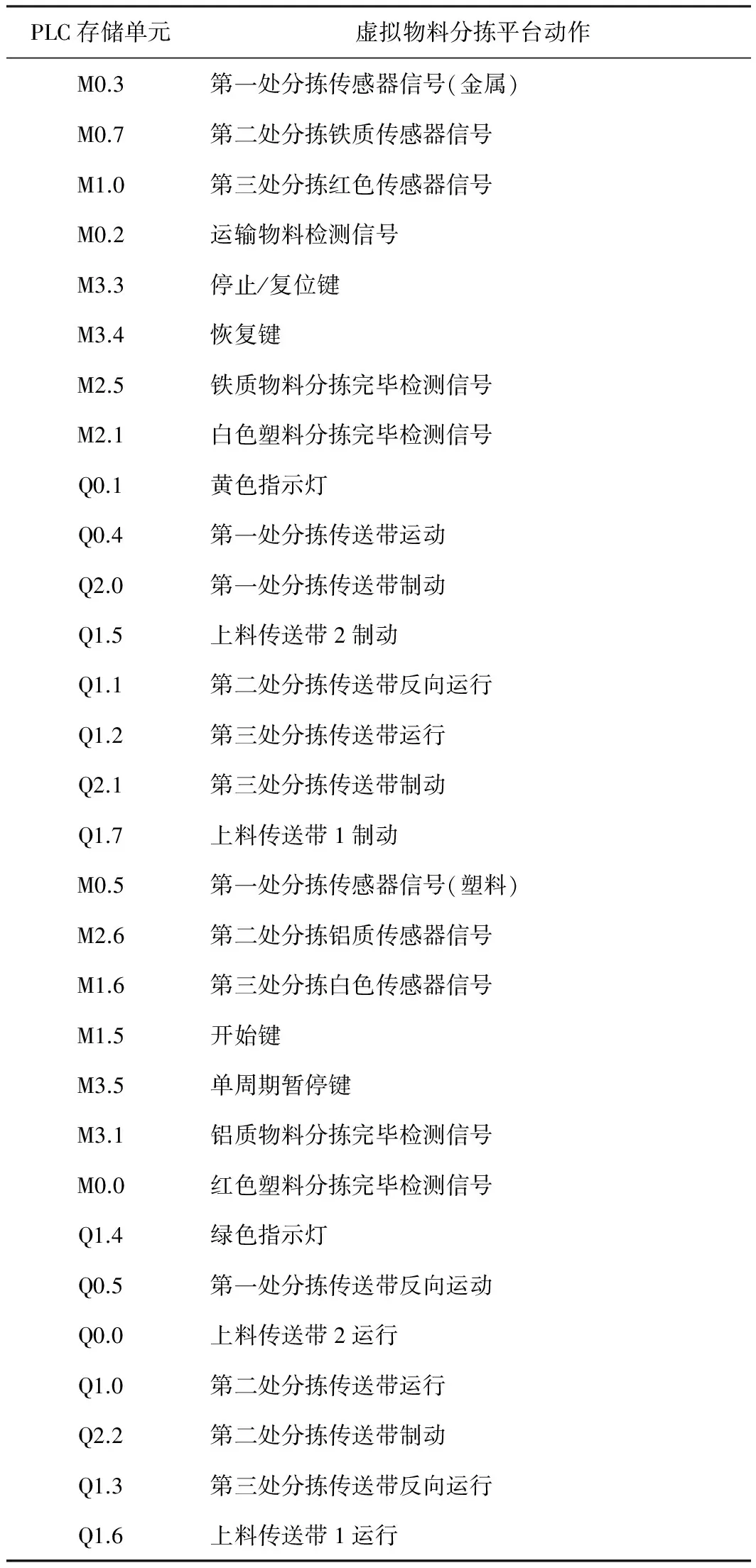
表1 PLC变量表
4.2 PLC程序设计
PLC程序主要由7个模块组成,分别是传送带输送模块、第一处分拣模块、第二处分拣模块、第三处分拣模块、循环模块、人机界面模块和指示灯模块。PLC程序流程图如图5所示。
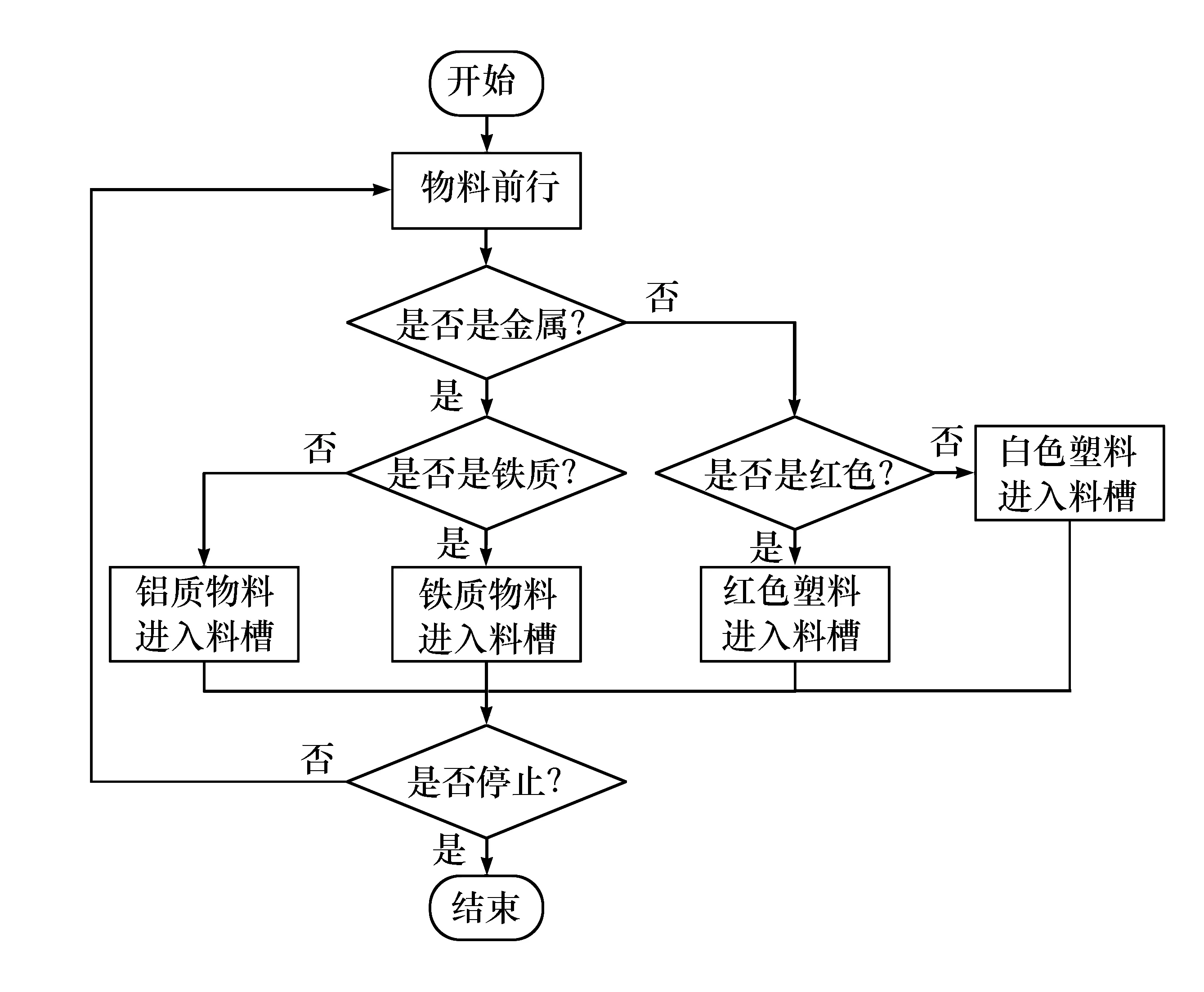
图5 PLC程序流程图
5 实验系统测试
S7-300与虚拟物料分拣平台进行通信连接,然后下载物料分拣实验程序,再将S7-300控制器置于“Run”状态,打开程序监控模式,进行系统的测试。
(1) 上料传送带测试。点击虚拟人机界面上的“Start”按钮后,系统正常启动,上料阶段的传送带载着物料前进,同时状态指示灯显示黄色。测试结果如图6(a)所示,表明能够正常上料,进入分拣准备阶段。
(2) 分拣测试。物料随传送带前行,当第一个物料经过上料传送带1进入上料传送带2后,上料送带1停止,其他后续物料等待,上料传送带2继续载着第一个物料前行,此时,状态指示灯显示绿色,如图6(b)所示。当物料经过一次分拣传感器时进行第一次分拣,分拣完毕后物料会进入第二级传送带准备第二次分拣,如图6(c)所示。物料经过二次分拣传感器时进行第二次分拣,分拣完毕后物料进入第三级传送带,直到进入黑色箱体,如图6(d)所示。
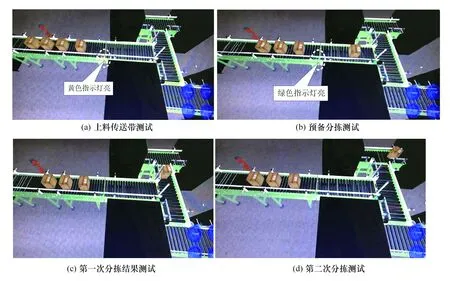
图6 虚拟物料分拣平台测试
6 结语
基于虚拟对象的物料分拣实验系统实现了4类物料的分拣,并通过VUP仿真软件完整地展现平台的运行过程。虚拟平台具有通用性,当系统中的传感器换成其他类型时,可以实现对其他物料的分拣。使用虚拟对象代替实际工业设备,降低了学生操作的危险性,减少了设备的故障率,降低了教学工作强度,间接扩大了实验实践教学的受益面。同时,虚拟设备的运行容易制作视频,为实验实践教学慕课建设提供了便利条件。
然而,虚拟物料分拣毕竟不同于实际的生产,使用虚拟对象进行实验实践课程训练既不是最终的目标,也不是独有的方法。在虚拟平台上完成训练后,将经验应用到实际生产设备中再进行实践,利用实际设备操作实践再回头完善虚拟平台,二者相辅相成、相互完善,才能达到较好的教学目的。
References)
[1] 赵朋可.熔融石英炉装置控制系统半实物仿真应用研究[D].洛阳:河南科技大学,2013.
[2] 安建强.基于虚拟仿真技术的创新训练研究与实践[J].实验技术与管理,2015,32(12):179-182.
[3] 秦岩,代伟,杨杰,等.基于软PLC技术的磨矿过程运行控制系统及实验[J].东北大学学报(自然科学版),2015,36(3):309-313,317.
[4] 高印寒,马增治,李春光,等.虚拟现实技术及其在机械工程中的应用[J].吉林大学学报(工学版),2003,33(2):104-106.
[5] 马希青,周国朝,袁云东,等.挤出机动态交互仿真平台的研究与实现[J].机械工程师,2014(2):132-134.
[6] 单超.双馈风力发电机控制系统半实物仿真平台设计[J].控制工程,2015,22(3):581-584.
[7] 张令涛.矿井三维建模与可视化系统设计与实现[D].邯郸:河北工程大学,2015.
[8] 谢世富,马力元,刘鹏远,等.虚拟环境下运动线缆碰撞检测算法研究与实现[J].系统仿真学报,2013,25(8):1865-1870.
[9] 刘继光,袁浩,汪泽,等.基于Irai的啤酒生产线虚拟控制平台设计与实现[J].实验技术与管理,2015,32(6):127-129.
[10] 何新霞.基于LabVIEW虚拟对象的PLC控制实现[J].微计算机信息,2007,23(4):23-25.
[11] 都淼,宋春跃,王慧.混杂系统的虚拟对象实验室平台建设[J].控制工程,2006,13(3):264-267.
[12] 许金星.软PLC虚拟电梯并联控制实验系统研究[D].昆明:昆明理工大学,2013.
[13] 汤健,翟廉飞,柴天佑,等.工业过程虚拟对象软件平台的设计与开发[J].山东大学学报(工学版),2010,40(1):28-32.
[14] 张睿.虚拟PLC实验平台的研究与设计[D].北京:北京化工大学,2014.
Design of material sorting virtual experimental system
Xu Lichuan, Liu Jiafeng
(School of Mechatronics Engineering, University of Electronic Science and Technology of China, Chengdu611731,China)
In order to solve the main problem of the lack of the actual large-scale industrial equipment in the experimental training course in colleges and universities, a kind of virtual experimental system for material sorting based on Virtual Universe Pro (VUP) is designed in this paper. In the system, the action of actual material sorting can be simulated by the three-dimensional simulation model of material sorting platform. And the experimental program for material sorting is designed and debugged in STEP7 after the connection of the virtual material sorting platform and the S7-300 controller. The final test shows that the basic functions of the virtual experimental system for material sorting are completed, that four kinds of materials including aluminum materials, iron materials, white plastic and red plastic can be correctly sorted.
material sorting system; virtual simulation experiment; VUP;PLC
10.16791/j.cnki.sjg.2017.02.028
2016-08-23
电子科技大学2015—2017年高等教育人才培养质量和教学改革项目(2015XJYYB049)
许丽川(1976—),女,四川富顺,硕士,工程师,主要从事可编程序控制器及电机控制方面的实验教学和研究工作.
E-mail:xulichuan@uestc.edu.cn
TP273
A
1002-4956(2017)2-0105-05
