履带式联合收获机水田作业小半径转向阻力研究
2017-03-01韩彦勇郑喜贵
韩彦勇, 郑喜贵
(郑州科技学院机械工程学院,河南郑州 450064)
履带式联合收获机水田作业小半径转向阻力研究
韩彦勇, 郑喜贵
(郑州科技学院机械工程学院,河南郑州 450064)
减小转向阻力矩,减少油耗,是设计履带收获机的一个指标,针对履带收获机小半径转向情况,提出了3种牵引力和1种侧面转向阻力矩的计算方法,并进行实车试验证明了小半径转向时侧面剪切土壤引起的阻力矩占总转向阻力矩中的比重很大,进而得出减少侧面剪切土壤引起的阻力矩就可以减少收获机转向阻力矩这一观点的正确性,为今后履带车辆设计提供了依据。
履带车辆;转向阻力矩;剪切土壤;联合收获机;履带式收获机
联合收获机转向是否灵活直接影响到车辆的使用效率、燃油经济性和驾驶员的劳动强度[1]。履带式联合收获机是通过转向力矩克服转向阻力矩来实现转向的,因此在设计履带车辆时,就要考虑如何减小转向阻力矩。履带车辆在水田小半径转向时,由于履带下陷,转向阻力矩不能按常规方法进行计算,还应考虑侧面履带剪切土壤引起的阻力矩。本研究分析了履带车辆小半径转向时的牵引力,转向力矩的计算方法,并通过试验证明了方法的正确性,为今后履带车辆的设计提供了理论依据。
1 履带车辆在水田作业时的牵引力
履带车辆小半径转向,其左右侧履带的运动方向相反,两侧履带都会出现滑转现象,滚动摩擦阻力受力方向不同于大半径转向,并且由于车体下陷,它所受的侧面推土力,履齿的剪切力都不能忽略。因此其驱动力和转向阻力矩都不能单单只考虑履带地面的摩擦力,而要深入研究履带与地面之间的相互作用。
1.1 方法1
贝克提出了一种分析履带与土壤相互作用的方法,把与土壤接触的那部分履带板模型简化为一个刚性踏板,运用土壤压力与沉陷的关系,就可以分析预测出履带车辆在软地面行驶时履带沉陷量和所受的阻力[2]。
履带的牵引力是由于履带板与土壤的剪切形成的,Micklethwaite首先应用了库伦公式。
τmax=C+Ptanφ。
式中:τmax为最大剪切强度(Pa);C为土壤的内聚力(Pa);P为正压力(Pa);φ为土壤的内摩擦角(°)。预测车辆可能发挥的最大驱动力。履带与地面的接触面积如图1。
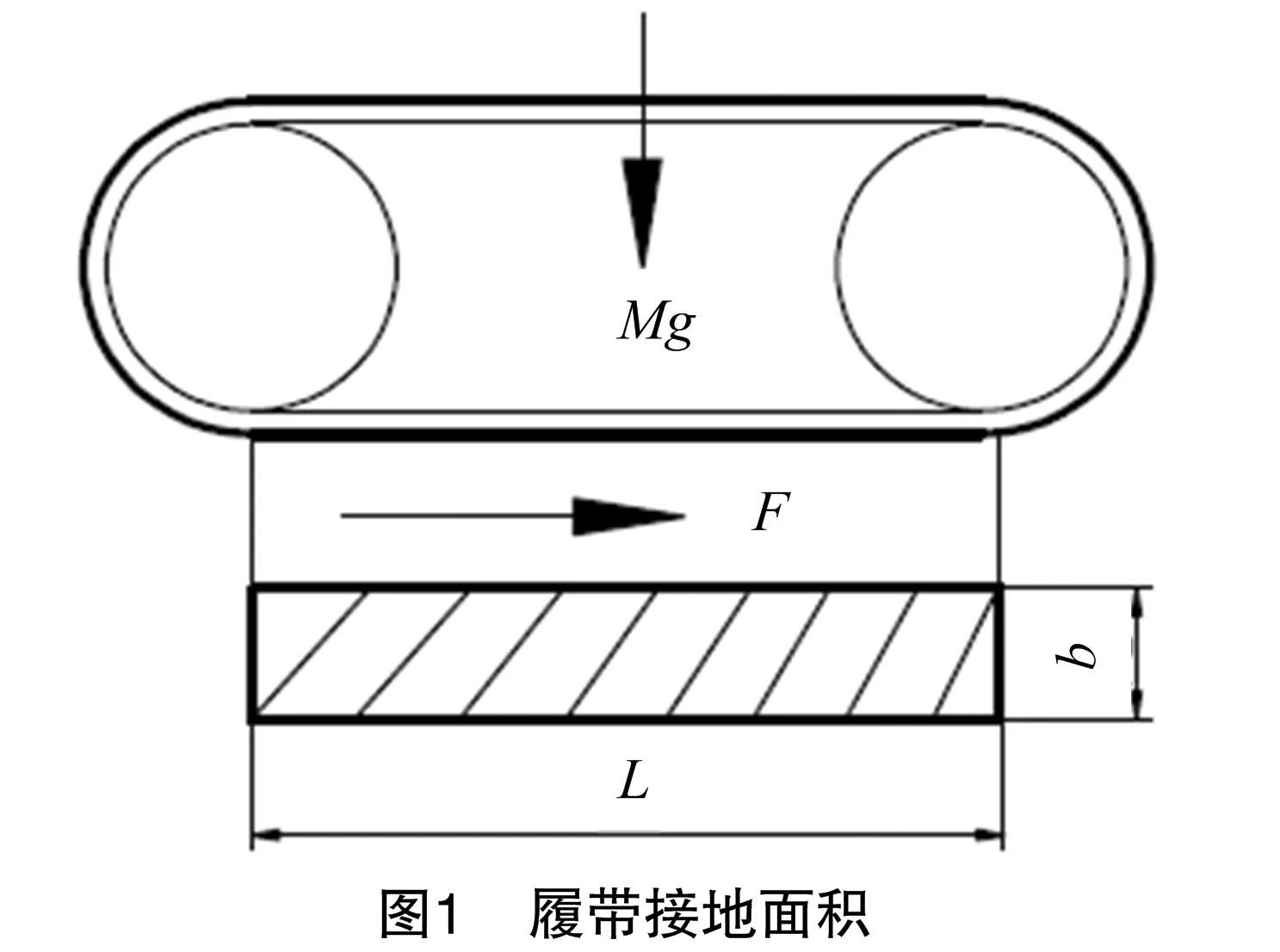
则总的驱动力Fmax等于单位剪切强度沿接触表面的积分:

(1)
式中:Fmax为总驱动力(N);b为履带接地面积宽度(m);L为履带接地面积长度(m);x为任意一点的履带的接地面长度(m)。
式1表明履带车辆在软地面行驶时的最大驱动力可以看作两部分:一部分是由土壤内聚力产生的,与履带车辆中履带板与地面的接地面积有关;另一部分是由土壤的内摩擦力产生的,与车辆的重量成比例。
因此,当某土壤的特性参数φ≈0时,土壤的驱动力为Fmax=2bLC,要增加履带车辆行驶驱动力就只有增加履带板与土壤的接触面积,而与履带车辆的重量无关。该土壤为塑性土壤,塑性土壤的内摩擦角接近于0。
当某土壤的特性参数C≈0时,驱动力为Fmax=Mgtanφ,在这样的土壤中,车辆的驱动力只与车重有关,而与履带板和土壤的接触面积无关,要增加履带车辆的驱动力就只有增加车辆的重量。该土壤为摩擦性土壤,如干沙,干沙的内聚力接近于0。但大多数土壤既不是纯塑性的,也不是纯摩擦性的,而是具有2种性质的粒状物质的混合物,像水稻田土壤。
1.2 方法2
式1适用于在最佳滑动条件下产生的最大值。
根据Janosi和Hanamoto的经验公式:
τ=(C+Ptanφ)(1-e-Sj /K)。
(2)
式中:K是土壤剪切模量;Sj是履带某点剪切位移。
对式2微分

(3)
由式3可知K是过原点作曲线的切线,切线与τmax水平线交点至纵坐标的距离,如图2。

由τ=(C+Ptanφ)(1-e-Sj /K)可知,当土壤参数、车重和土壤剪切模量一定时,在一定滑转率时,履带车辆的驱动力从履带接地前段到履带接地末端逐渐增大。则总的驱动力F为:

(4)
式中:i表示履带某点的滑移速度(履带实际速度与理论速度的差值)与理论速度的比值。
此驱动力没有考虑履带侧面受的力,假若履带上安装高h的履齿(图3),则该履齿沿表面2hL的侧向剪切就应该考虑。为了计算履齿高度为h的履带的全部驱动力,必须将履带两侧面面积2hL上的驱动力也计算进去[3]。贝克假定这2个垂直剪切面上的侧压力可以像Boussinesq在应力分布理论中假设的那样求得,如图4。

作用于履带两侧面的土壤压力的垂直分力NX的摩擦力为2LNXtanφ,而NX由下式求得:


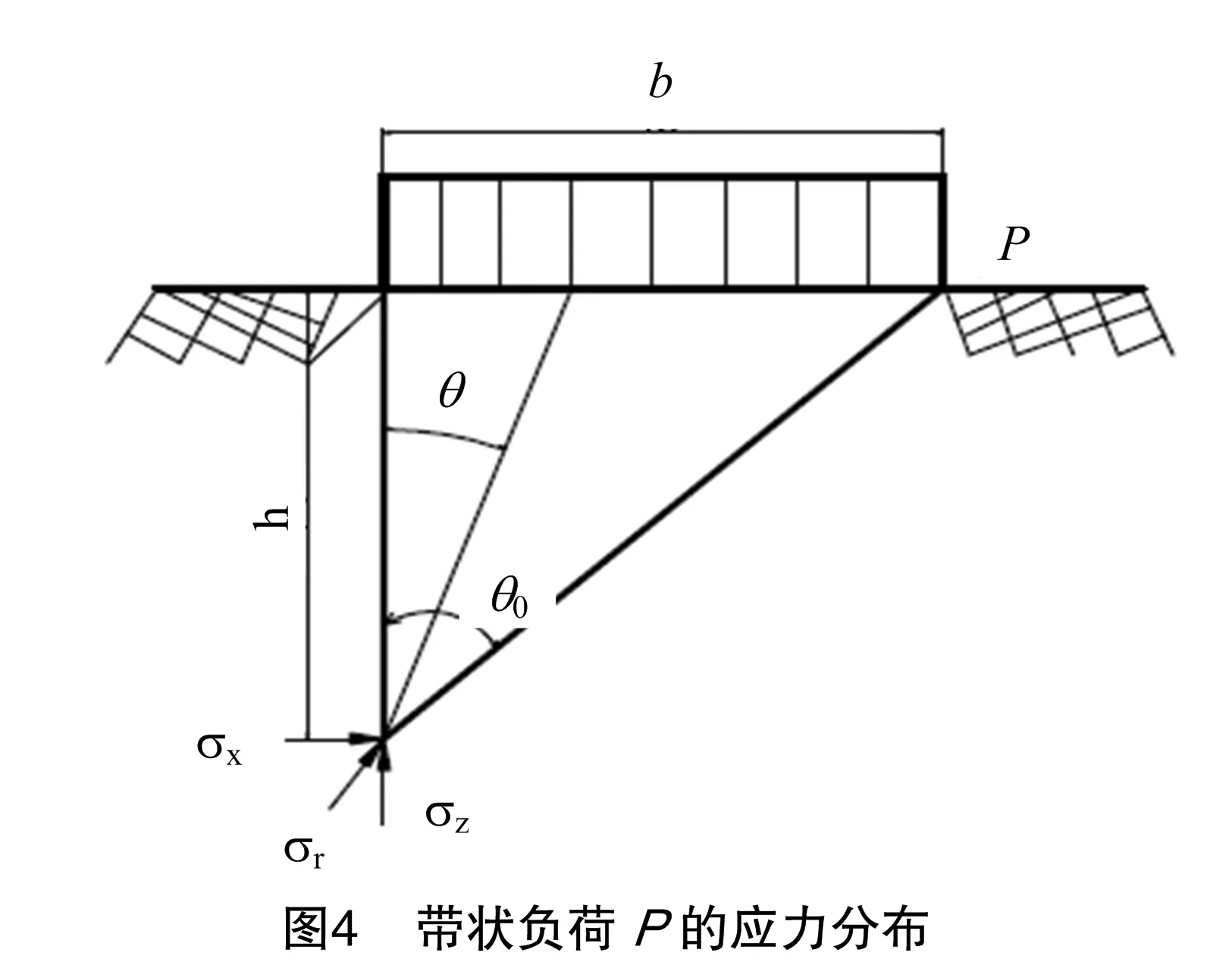
则


(5)
式中:σx表示带状负荷P的水平应力;θ0表示履带宽b与履齿高度h的垂直截面的几何夹角;θ表示履带宽任意一点与履齿高度h的垂直截面的几何夹角。
作用于履带板两侧的内聚力为2ChL,故一条履带的侧面剪切力为:

(6)
那么整个履带车辆的驱动力为:
(7)
由此可以算出履带车辆的驱动力矩。
1.3 方法3
假设:
(1)履带车辆在几何上关于其纵向、横向平面对称,其质心在水平面上的投影和车辆平面几何中心重合。
(2)履带车辆在水平地面上转向时履带接地压力呈均匀分布。
(3)履带车辆作低速转向,不计离心力的影响及转向角速度变化。
(4)车辆行驶阻力系数不因转向而变化[4-5]。
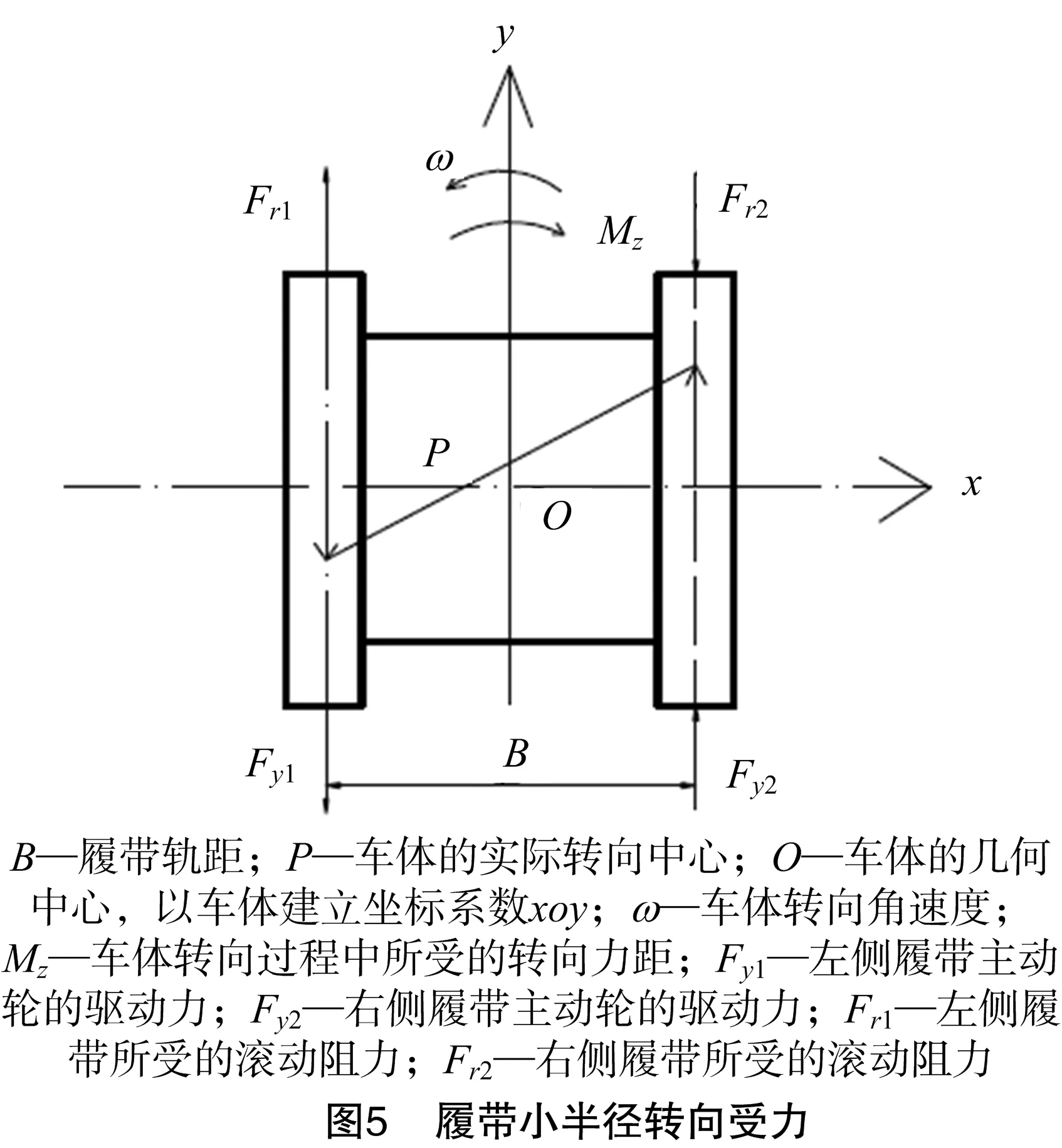
履带车辆在水平地面上作小半径低速转向运动时受力如图5所示,两履带运动方向相反,两履带主动轮上所受的力方向相反,两履带所受的滚动阻力也相反。那么:

(8)

(9)
2 履带车辆小半径转向时的转向阻力矩
履带在水田中转向时,受到履带与地面摩擦产生转向阻力矩和由于履带下陷而使履带侧面推土引起的转向阻力矩,总转向阻力矩是2个阻力矩之和。
2.1 履带与地面摩擦产生转向阻力矩[6]
不计履带宽度影响,不考虑履带接地段打滑时普遍采用的转向阻力矩的表达式为:

(10)
2.2 侧面剪切土壤引起的转向阻力矩
土壤具有弹性、塑性和黏性,是一个复杂体,利用公式计算的结果与实际难免有误差,而采用仪器直接测出推土力,进而导出侧面转向阻力矩,既方便又准确。
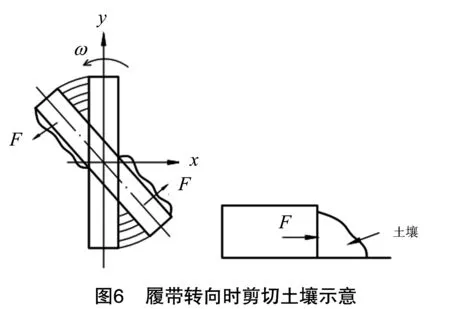
不计履齿之间的间隔,假设履带侧面为一矩形,转向时每条履带绕各自的履带中心转向,履带要推动周围的土壤如图6所示,从而产生侧面转向阻力矩。

总转向阻力矩:M=Mz+M侧。
3 田间试验
试验车参数:总重G=2 500 kg;中心距B=1 350 mm;接地长度L=1 900 mm;带宽b=350 mm;重心与机具形心距Cx=0 mm;Cy=0 mm。
进行2个试验,分别是履带收获机输出轴扭矩试验和侧面剪切土壤试验。
3.1 侧面剪切土壤试验
用NJY-3型农机通用动态遥测仪与剪切土壤装置连接进行试验。
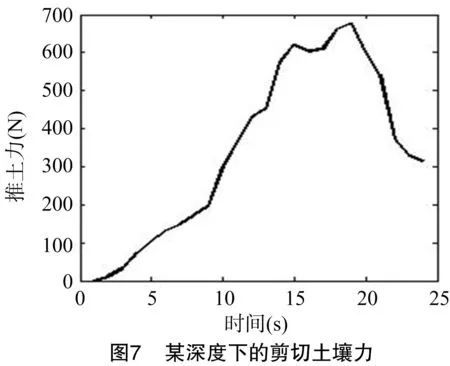
试验时履带下陷深度为40 mm,在履带车辆试验地点旁做了40 mm深的推土试验,测得的数据为:484.000,488.000,495.000,509.000,519.000,529.000,534.000,543.000,551.000,586.000,609.000,630.000,638.000,679.000,695.000,689.000,691.000,709.000,714.000,688.000,668.000,610.000,596.000,591.000。初始值:484.000。
土壤破坏后,剪切板前面的土壤都会松动,因此继续推剪切板,土壤阻力会迅速减小,剪切板变形小,仪器读数就小,如果继续推前面新土,剪切板受力又继续增大,继续破坏土壤。
转化为推土力如图7所示,最大值为677 N,那么单侧履带侧面剪切土壤引起的转向阻力矩为:

整车履带侧面剪切土壤引起的转向阻力矩为 3 942N·m。
3.2 输出轴扭矩试验
用NJY-3型农机通用动态遥测仪与履带收获机输出轴上的应变片连接,进行多次小半径试验,换算出转向力矩,取平均值,就是履带收获机的转向阻力矩[7-8]。如果不考虑侧面阻力矩,只按普遍采用的转向阻力矩的表达式计算阻力矩,误差很大,因此,2个试验也验证了上述理论分析的正确性。将转向阻力矩与侧面阻力矩关系列入表1。

表1 小半径下的转向阻力矩
由表1可以看出,侧面阻力矩占总转向阻力矩的比重很大,当土壤条件和车辆结构参数一定时,履带板与地面摩擦产生的阻力矩是不太能改变的,要想改变总转向阻力矩,就要减少侧面剪切土壤引起的阻力矩。
4 结论
履带收获机在水田小半径(0≤R≤B/2)转向时,由于履带下陷,不能忽略侧面推土力,提出了3种牵引力和1种计算侧面阻力矩的方法。
进行实车试验,测出了小半径下的转向阻力矩,并做了侧面剪切土壤试验(深度40 mm),得出了侧面的转向阻力矩(3 942 N·m)。
提出了要减少小半径转向阻力矩,就要减少侧面剪切土壤引起的阻力矩这一观点。
[1]曹付义,周志立,贾鸿社. 履带车辆转向机构的研究现状及发展趋势[J]. 河南科技大学学报(自然科学版),2003:24(3):89-91.
[2]贝克 M G. 地面-车辆系统导论[M]. 《地面-车辆系统导论》翻译组,译. 北京:机械工业出版社,1978:96-104.
[3]许 焰,吴鸿云,左立标. 履齿高度对集矿机牵引性能的影响及参数确定[J]. 农业工程学报,2012,28(11):68-74.
[4]杨家军,周晓军,魏燕定,等. 履带车辆试验台建模与控制方法[J]. 农业机械学报,2013,44(6):8-13.
[5]李 勇,姚宗伟,王国强. 四履带车辆转向性能仿真研究[J]. 农业机械学报,2011,42(2):34-38.
[6]宋海军,高连华,程军伟. 履带车辆转向过程打滑率测试方法研究[J]. 车辆与动力技术,2007(2):4-6.
[7]张广庆,朱思洪,李伟华,等. 铰接摆杆式大功率拖拉机原地转向仿真与实验[J]. 农业机械学报,2012,43(10):25-30.
[8]宿月文,朱爱斌,陈 渭,等. 履带机械地面力学建模及牵引性能仿真与试验[J]. 西安交通大学学报,2009,43(9):42-45.
10.15889/j.issn.1002-1302.2017.02.062
2015-11-18
河南省科技厅科技攻关项目(编号:142102210509)。
韩彦勇(1984—),男,河南尉氏人,硕士,讲师,主要从事机械自动化研究。E-mail:88669936@qq.com。
郑喜贵,讲师,主要从事机械制造、数控技术研究。E-mail:894666216@qq.com。
S225.3
A
1002-1302(2017)02-0213-03
韩彦勇,郑喜贵. 履带式联合收获机水田作业小半径转向阻力研究[J]. 江苏农业科学,2017,45(2):213-216.
