变论域模糊控制器单元机组SCR烟气脱硝控制研究
2017-02-27潘维加
廖 鹏,潘维加
(长沙理工大学 电气与信息工程学院,长沙 410114)
变论域模糊控制器单元机组SCR烟气脱硝控制研究
廖 鹏,潘维加
(长沙理工大学 电气与信息工程学院,长沙 410114)
SCR烟气脱硝系统的脱硝率由喷氨量来控制,而喷氨流量控制系统控制喷氨量,因此,优化喷氨流量控制系统能有效提高脱硝率;设计了一种基于变论域的模糊控制器来实现喷氨量的优化控制,并采用 MATLAB 仿真软件对此控制方案进行仿真,并与传统的控制方案的结果进行对比分析;结果表明,基于变论域的模糊控制喷氨流量系统相对于传统的PID控制,其超调小,且鲁棒性较强,有效地提高了控制品质。
喷氨量;变论域;模糊控制;MATLAB仿真
0 引言
如今火力发电过程中产生的大量氮氧化物对环境产生了严重的影响,对氮氧化物的控制势在必行。喷氨流量控制系统是一个大惯性,大延迟系统,利用传统的PID控制不能有效的控制氨气的喷入量,非常容易造成氨气的过量喷入,造成二次污染。近年来,人们不断地提出了各种智能的控制方案,以求得到良好的控制效果。文献[1]中作者提出了一种NOx排放量的多步超前预测控制,优化了过量空气控制,以及各种燃烧器的空气流量和燃料平衡,以达到最小的氮氧化物形成,给系统在线控制提供参考。文献[2]作者基于输出敏感度法的RBF神经网络模型,该模型通过改变网络神经元的数量,在线优化神经网络的结构,对整个网络结构进行优化。仿真实验结果显示,在工况变动较快的情况下,采用SA-RBF神经网络对喷氨量进行优化比传统PID控制具有更好的控制品质。文献[3]作者提出一种串级PID比例控制模型,该模型引入了反应器出口NOx浓度偏差前馈,加强了控制系统调节的及时性,有效控制喷氨阀门的开度,但是系统调节时间过长。
本文建立了基于变论域模糊控制器的喷氨流量控制系统模型,并利用MATLAB仿真软件进行仿真研究,把控制系统的仿真运行曲线与传统的基于PID控制的喷氨流量控制系统的仿真曲线进行比较,对结果进行分析,得出结论。
1 喷氨流量控制系统分析
1.1 SCR烟气脱硝效率的主要影响因素
在SCR烟气脱硝控制系统中,SCR烟气脱硝效率受众多因素的影响:催化剂是SCR烟气脱硝系统中最主要的部分,其反应活性以及排布方式都对脱硝效率有重大影响;反应温度影响着催化剂的活性,同时,反应温度过高会使一些副反应发生,产生其他大气污染物;空速反应了脱硝烟气在催化剂内停留的时间,在催化剂内停留的时间越长,反应越充分,脱硝效率越高,但是过长的停留时间会使氨气氧化,降低脱硝效率;氨氮摩尔比是脱硝效率最直接的反映,理论上来说,1 mol氨能处理1 mol的NOx,氨的含量不足,会使脱硝效率变低,氨的含量过高,会造成二次污染。
1.2 SCR烟气脱硝喷氨流量控制策略分析
在影响SCR烟气脱硝控制系统脱硝效率的因素中,空速和催化剂的性能以及排布方式是设定好的,SCR入口NOx浓度和反应温度是不受SCR系统控制的,在脱硝方案中,根据脱硝系统的性能确定以及环保规定,设定一定的氨氮摩尔比是常用的控制方式。在实际运行中,燃煤产生的NOx浓度也是不断变化的,在控制系统中,要根据脱硝系统中的NOx含量要确定氨的需求量。因此,控制器的输入是实际需氨量的偏差和需氨量的偏差变化率,输出是需氨量。控制系统调节原理如图1所示。
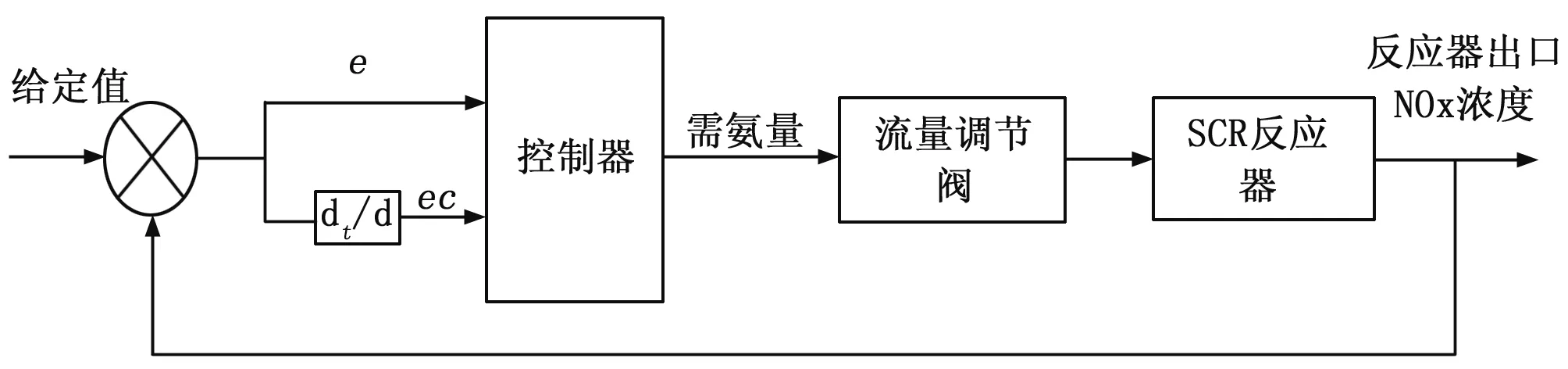
图1 控制系统调节原理图
在此控制策略中,SCR反应器出口NOx浓度是被调量,喷氨量是调节量,被控对象是氨气流量调节阀和SCR反应器。根据反应器出口烟气中NOx浓度与设定值的偏差以及偏差变化率,通过控制器的调节,得到实际氨气流量需求量,调节流量调节阀开度,把需氨量喷入SCR反应器。
2 变论域模糊控制设计方案
2.1 喷氨流量变论域模糊控制系统设计
根据SCR烟气脱硝喷氨流量控制系统需氨量偏差以及偏差变化率,分别乘上各自的伸缩因子函数,得到控制器的输入量,通过控制器的调节,得到控制器的输出,在通过输出伸缩因子函数的调节,作用到被控对象。SCR烟气脱硝喷氨流量变论域模糊控制系统原理如图2所示。
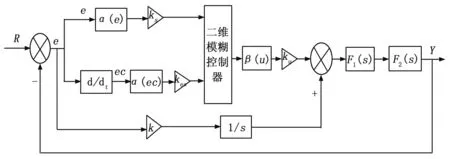
图2 喷氨流量控制系统变论域模糊控制方案原理图
其中,F1(s)、F2(s)分别为流量调节阀和SCR反应器的传递函数;R为反应器出口NOx浓度给定值,Y为反应器出口NOx浓度,α(e),α(ec)分别为偏差和偏差变化率论域伸缩因子的函数,β(u)表示输出论域伸缩因子的函数。为了使模糊控制器达到无差调节,在控制系统中加入积分环节。Ke为误差量化因子,Kec为误差变化率量化因子,Ku为控制量比例因子,K为并联积分环节的积分常数。
2.2 变论域模糊控制算法伸缩因子的设计
变论域模糊控制器的核心是伸缩因子的设计,目前来说,伸缩因子的形式不是统一的,文献[5]中作者选用的论域伸缩因子函数为:
(1)
本文设计的是一个双输入单输出的控制器,若采用文献[5]中伸缩因子的函数,即把α(e),α(ec)分别表示偏差和偏差变化率论域伸缩因子的函数,把β(u)表示输出论域伸缩因子的函数,从偏差和偏差变化率论域伸缩因子的函数式中可以看出,它们只与本身的变化有关系,但是在实际的控制过程中,偏差和偏差变化率是互相影响的,当偏差的论域变化时,会通过系统输入的变化,影响偏差变化率论域的收缩,进而,系统的收敛速率也降低了。本文采用了一种用偏差以及偏差变化率共同作用输入论域伸缩因子的函数,即:
(2)
其中:τ∈(0,1],ε为较小的正数。
本文选取的伸缩因子函数的系数为:τ=1,ε=0.5,k=100。
2.3 变论域模糊控制器的设计
本文采用了一个二维模糊控制器,其输入变量为反应器出口NOx浓度与设定值偏差e以及偏差变化率,输出变量为流量调节阀门开度u。设定偏差e的基本论域为[-3,3],定义其量化等级为[-6,6],设初始的量化因子为k1=2;变化率ec的基本论域为[-20,20],定义其量化等级为[-5,5],设初始的量化因子为k2=0.25;控制量u的基本论域为[5,100],定义其量化等级为[-5,5],设初始的比例因子为k3=9.5。
为提高控制精度,在设计模糊子集时将e和ec均分为7个模糊集:负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB);将u也分为7个模糊集:负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)。
根据控制经验,建立模糊控制规则表,见表1。

表1 模糊控制规则表
本文根据表1设计了模糊控制器,其输入和输出的隶属度函数采用三角形函数,并且应用重心法进行反模糊化运算。
3 超临界机组喷氨流量控制系统仿真与分析
3.1 SCR烟气脱硝喷氨流量变论域模糊控制系统仿真
根据文献[6]中,被控对象喷氨流量调节阀模型传递函数为:
SCR反应器模型传递函数为:
用Matlab构建基于变论域模糊控制的SCR烟气脱硝喷氨流量控制系统的仿真模型,如图3所示。

图3 SCR烟气脱硝模糊控制系统仿真图
其中,R为SCR反应器出口NOx浓度给定值,W为喷氨量扰动;Fun函数为输出论域伸缩因子的函数,Fun1为输入偏差论域伸缩因子的函数,Fun2为输入偏差变化率论域伸缩因子的函数。
3.2 SCR烟气脱硝喷氨流量变论域模糊控制与传统PID控制比较
将图2中的模糊控制器换成PID控制器,构建SCR烟气喷氨流量脱硝控制系统PID控制仿真模型,其系统传递函数不变。
设置需氨量给定值R=1,仿真时间为2 500 s。通过仿真,得到仿真曲线如图4所示。图中,实线为变论域模糊控制曲线,虚线为PID控制曲线。此时,变论域模糊控制器的最优参数为Ke=1.2,Kec=0.4,Ku=9,并联的积分环节其最优参数为K=-0.000 6。PID控制器的最优参数为Kp=-0.5,Ki=-0.002。

图4 NOx浓度给定值为1时仿真曲线图
从图中可以看出,基于PID控制喷氨流量控制系统的曲线有超调,但是超调量低于20%,基于变论域模糊控制的喷氨流量控制系统的曲线略有超调。基于变论域模糊控制的喷氨流量控制系统的系统稳定时间要比基于PID控制的快,PID控制大约为1 200 s,变论域模糊控制大约为1 150 s。由此可知,变论域模糊控制具有较好的抗超调能力。
设置喷氨量扰动0.2,即W=0.2,仿真时间为2 000 s。得到仿真图如图5所示。

图5 20%喷氨量扰动的仿真曲线
从图中可以看出,基于PID控制的喷氨流量控制系统和基于变论域模糊控制的喷氨流量控制系统的曲线都能平稳到0,但是变论域模糊控制恢复稳定的时间低于PID控制器,说明其具有良好的抗内扰能力。
设置被控对象的时间常数T=12 000,τ=80,仿真时间为2 000秒。得到仿真图如图6所示。

图6 T=12 000,τ=80时控制系统的仿真曲线
从图中可以看出,当被控对象传递函数发生变换后,即τ大于60后,基于PID控制的喷氨流量控制系统的曲线发生振荡,不能稳定下来,但是基于变论域模糊控制的喷氨流量控制系统的曲线的超调略微增加,能够保证系统的稳定,说明其具有良好的鲁棒性。
把PID控制器的最优参数改变,设置其为Kp=-1,Ki=-0.002 2,改变变论域模糊控制器的最优参数,设置其为Ke=5,Kec=0.8,Ku=50,K=-0.001,仿真时间为2 000 s。得到仿真图如图7所示。
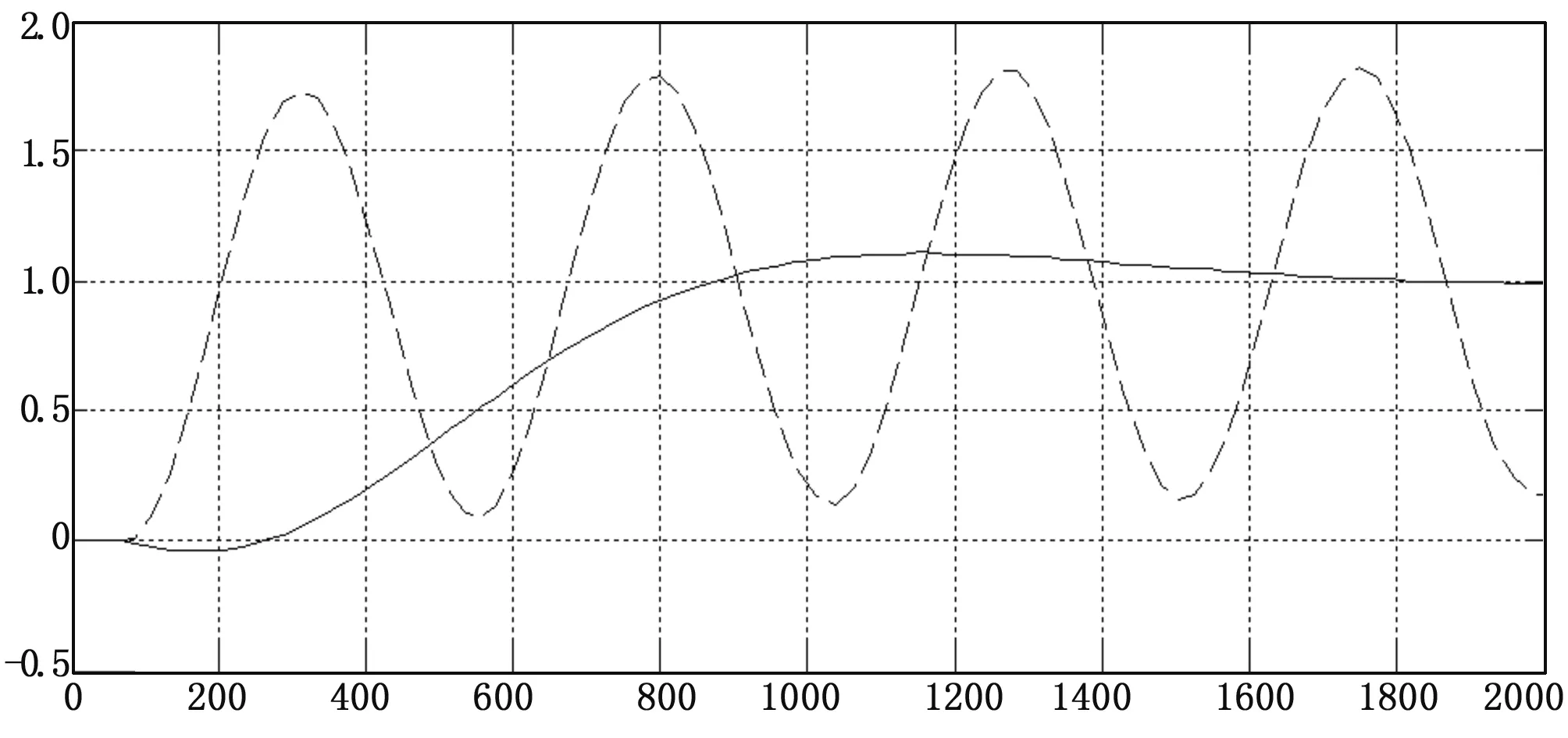
图7 改变控制器参数系统的仿真曲线
从图中可以看出,变论域模糊控制器参数变化时,喷氨流量控制系统依然能够保持稳定,并且仿真曲线较为平滑,而PID控制器的参数变化时,控制系统不能保证稳定。通过仿真实验得出结论,当Ke,Kec变化较大,Ku在小于150,0>K>-0.002时,变论域模糊控制器均具有较好的控制品质。
4 结论
本文提出采用变论域模糊控制器对超临界机组SCR烟气脱硝喷氨流量控制系统氨气流量阀门控制。仿真结果表明该方案可以准确的根据NOx变化实现对需氨量的控制,与传统的PID控制系统相比较,本文设计的基于变论域模糊控制系统具有较强的抗超调能力,且在抗内扰过程中能够较快的恢复稳定,由此可知本设计方案具有较强的鲁棒性和较高的控制品质[7-14]。
[1] J Smrekar,P Potonik.A Senegacnik.Multi-step-ahead prediction of NOx emissions for a coal-based boiler[J].Applied Energy,2013(106):89-99.
[2] 赵 乾.SCR烟气脱硝系统模拟优化及喷氨量最优控制[D].重庆:重庆大学,2012.
[3] 王 立,贺悦科.SCR烟气脱硝自动控制系统及其在三河电厂的应用[J].华北电力技术,2009,29(3),29-31.
[4] 梁昭峰,李 兵,裴旭东. 过程控制工程[M].北京:北京理工大学出版社.2010.
[5] 李洪兴.变论域自适应模糊控制器[J].中国科学,E辑,1999,29(1):32-42.
[6] 朱孝强.Urea——SCR烟气脱硝系统控制策略研究[D].南京:东南大学,2012.
[7] 张志超.电厂 SCR 脱硝系统建模与优化控制[D].北京:华北电力大学,2015.
[8] 陈立军,周正兴,赵丽丽.先进控制策略在火电厂热工控制中的应用[J].东北电力大学学报,2009,29(1),58-61.
[9] 周长城,金保昇,朱孝强,等.自适应模糊方法在烟气脱硝喷氨量控制系统中的应用[J].环境工程,2014,32,482-487.
[10] 孙雅丽,郑 骥,姜 冰.燃煤电厂烟气氮氧化物排放控制技术发展现状[J].环境科学与技术.2011,6G(34):174-179.
[11] Zhou H,Zheng L G,Cen K F.Computational intelligence approach for NOx emissions minimization[J].Energy Conversion and Management,2010(51):580-586.
[12] 孙道林,吴华成,孙伟晋.电厂不同运行时间 SCR 脱硝催化剂动力学特征研究[J].华北电力技术,2015,3(8):18-22.
[13] 温苗苗.尿素选择性催化还原系统的优化与仿真[D].武汉:武汉理工大学.2009.
[14] 俞 逾.选择性催化还原系统的建模与仿真[D].重庆:重庆大学,2007.
Research on SCR Flue Gas Denitration of Unit on Variable Fuzzy Controller
Liao Peng, Pan WeiJia
(College of Electrical and Information Engineering, Changsha University of Science and Technology, Changsha 410114,China)
The denitrification rate of SCR flue gas denitrification system is controlled by the amount of ammonia, and the amount of ammonia spray controlled by ammonia flow control system. Therefore, optimizing the flow control system effectively improve the rate of denitrification. A fuzzy controller based on variable universe is designed to realize the optimal control of the amount of ammonia injection, and used Matlab simulation software to simulating, analysised and compared with the results of the traditional control scheme. The results show that, compared with the traditional PID control, the fuzzy control spray ammonia flow system based on the variable universe has smaller overshoot and stronger robustness, which can effectively improve the control quality of the control system.
spray ammonia amount; variable universe; fuzzy control;Matlab simulation
2016-07-22;
2016-09-06。
廖 鹏(1992-),男,湖南娄底人,硕士研究生,主要从事火电厂过程检测与控制技术方向的研究。
潘维加(1959-),男,湖南长沙人,研究生导师,主要从事火电厂过程检测与控制技术方向的研究。
1671-4598(2017)01-0084-04
10.16526/j.cnki.11-4762/tp.2017.01.024
TK323
A
