路面不平度识别与地图匹配在车辆定位中的应用
2017-02-22李帅帅鲍晨沈勇
李帅帅,鲍晨,沈勇
(同济大学汽车学院,上海 201804)
路面不平度识别与地图匹配在车辆定位中的应用
李帅帅,鲍晨,沈勇
(同济大学汽车学院,上海 201804)
随着电子地图精度的不断提高及信息种类的逐步丰富,将高精度电子地图用于辅助车辆定位,对提升定位精度与定位稳定性具有很大价值。在高精度电子地图及GPS/INS定位的基础上,提出了通过分析车辆垂向振动感知路面不平度特征,并与电子地图存储的道路不平度信息匹配,以实现车辆高精度定位的方法。道路测试结果表明:路面不平度识别与地图匹配定位方法能有效利用电子地图信息,获得高精度的车辆定位数据,在GPS/INS定位精度较低的情况下达到高精度定位效果。
车辆定位; 地图匹配; 路面不平度识别; 高精度地图
0 引言
先进驾驶辅助系统(Advanced Driver Assistant System, ADAS)、智能交通(Intelligent Transportation System, ITS)及自动驾驶车辆均需要获得车辆在道路上的精确位置信息[1-2]。目前车辆获得精确的定位信息多采用GPS、惯性定位(Inertial Navigation System, INS)、航位推算(Dead Reckoning, DR)及地图匹配(Map Matching, MM)组合等定位方法[3-5]。考虑到GPS定位稳定性较差和惯性定位随时间累积误差增大的特点,引入包含先验环境信息、位置信息的高精度电子地图辅助车辆定位,对提高车辆定位精度及定位稳定性具有极大价值。除传统的基于行车轨迹点[6-7]、基于行车轨迹段的地图匹配外[8-10],基于车辆感知环境信息的匹配定位方法近年来得到广泛研究[11-16]。用于地图匹配的道路环境信息主要包括交通参与者、交通设施、路边建筑、路面标线、路面不平度及道路坡度等静态交通信息。然而目前感知这些环境信息的研究多采用图像传感器、激光雷达等,所需传感器及数据处理器成本很高[11-14]。考虑以低成本传感器感知特定环境信息,如路面结构等也有所
研究[15],而利用惯性传感器感知路面不平度、道路接缝及凸起交通标线等路面环境以实现精确的地图匹配是文中的研究重点。
文中提出了基于道路不平度感知与高精度电子地图匹配结合的车辆定位方法。车辆通过惯性传感器的加速度计测量车辆垂向振动,进而感知识别路面不平度振动信息,并在GPS/INS定位误差的范围内搜索地图数据中对应的路面特征信息进行匹配,实现车辆在道路纵向上的高精度定位。
1 基于路面不平度特征的地图匹配定位方法
文中车辆定位采用GPS/INS及地图匹配组合定位方法,同时利用路面不平度特征与地图匹配修正定位误差,并可用于校准惯性传感器,提高后续路段惯性定位的精度。车辆定位流程如图1所示,GPS/INS组合定位给出车辆位置及地图匹配特征识别的搜索范围,INS的加速度计同时可用于识别路面不平度特征,高精度电子地图提供用于特征匹配的先验环境信息。
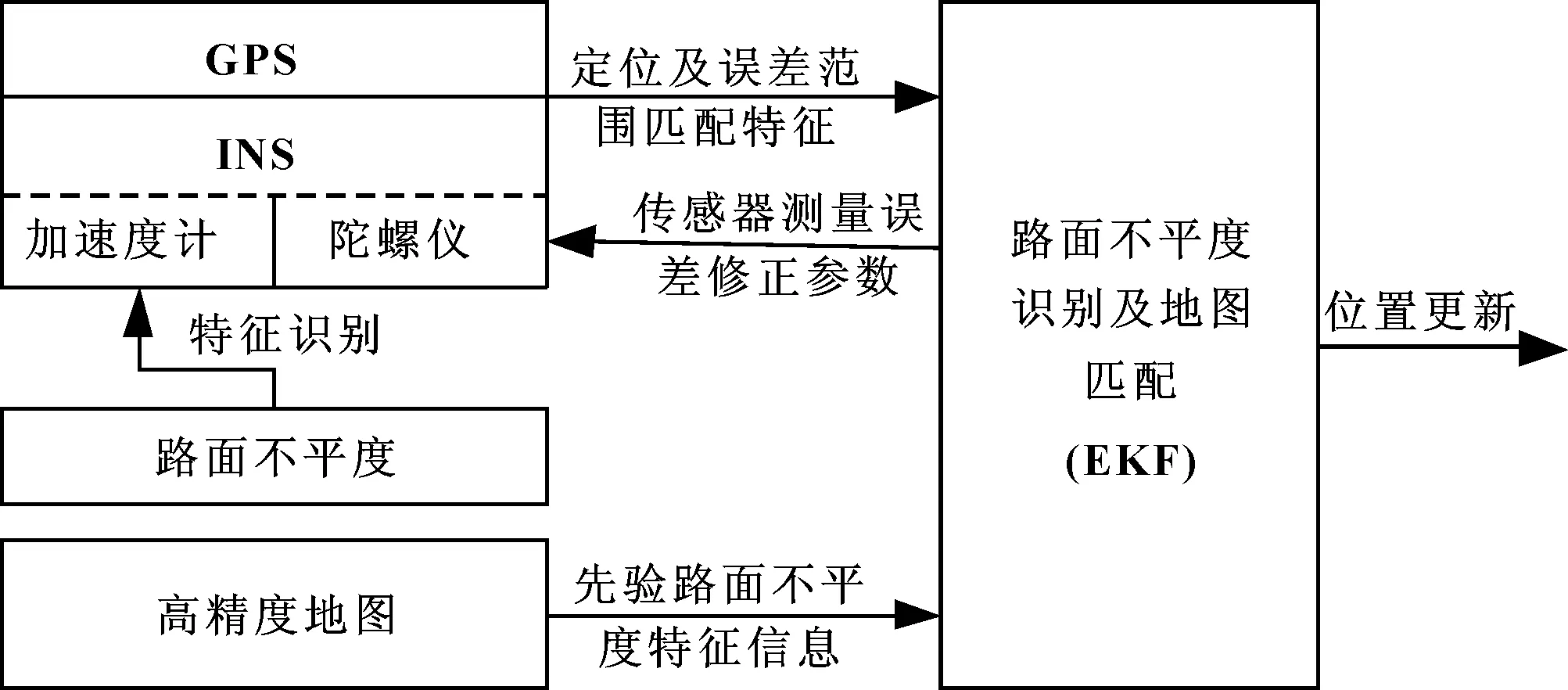
图1 基于路面不平度感知的地图匹配定位流程
1.1 融入路面不平度信息的高精度地图
地图匹配是一种软件定位导航技术,通过假设车辆按交通规则行驶在道路上以将定位不在道路上的车辆修正到车辆可能行驶的道路上。车辆通过感知道路环境信息与车辆电子地图的先验环境信息匹配获得精确的位置信息,不仅可以在GPS信号缺失时获得车辆的全局位置信息,且可以校正惯性器件误差。
为实现精确的地图匹配定位,需采用位置精度高、信息类型多样的电子地图。其中,电子地图为车道级电子地图,以达到分米定位精度[16]。电子地图的路面特征属性图层包含引起车辆垂向振动的路面输入特征,如路面不平度、道路接缝、振动标线、路面交通设施等路面环境信息,文中将这些引起车辆垂向振动的路面输入因素统称为路面不平度,且路面不平度表现为车辆垂向振动加速度,所以选取车辆垂向加速度表征路面不平度。
1.2 车辆GPS/INS/MM组合定位算法
GPS/INS给出用于地图匹配的车辆位置数据,同时也给出特征匹配搜索范围。采用扩展卡尔曼滤波(Extended Kalman Filter, EKF)方法融合GPS/INS与地图定位数据,以保证在GPS信号缺失情况下车辆的定位。
车辆定位系统的状态方程为:
(1)
其中:(x,y)、θ分别为车辆全局坐标和航向;v为车速;t为滤波间隔;ω为噪声。
车辆位置、航向的观测值为车辆感知的环境特征与地图匹配的结果,观测方程为:
(2)
式中:V1、V2、V3为量测误差。
由于地图匹配是依据车辆感知到的道路纵向特征完成的,因此车辆位置观测更新在道路不平度特征与地图匹配处实现,车辆航向的更新为GPS输出航向,但当车速较低时GPS航向误差较大[17],若此时车辆在道路直线段,则用道路方向更新航向。
路面不平度特征的搜索区域为定位误差范围,以误差矩形表示定位误差范围,GPS/INS组合定位的误差范围定义如下:
(Δx,Δy)=u1(ΔxGPS,ΔyGPS)+u2(ΔxINS,ΔyINS)
(3)
其中:u1、u2分别为根据不同GPS定位状态及惯性推算时间确定的误差范围扩展系数。
2 路面不平度特征识别与地图匹配定位实现
2.1 路面不平度特征选取
由于道路设计及道路施工原因等形成的路面不平度,对车辆有垂向振动激励输入,进而车辆能感知到路面不平度环境,得到地图匹配的标识。图2为车辆以不同速度通过同一路段时车辆的垂向振动响应,车辆垂向振动由INS的加速度计测量。可以看出以不同车速经过同一路段时,车辆在路段上相同位置具有相似的垂向振动响应,仅响应幅值有所不同。
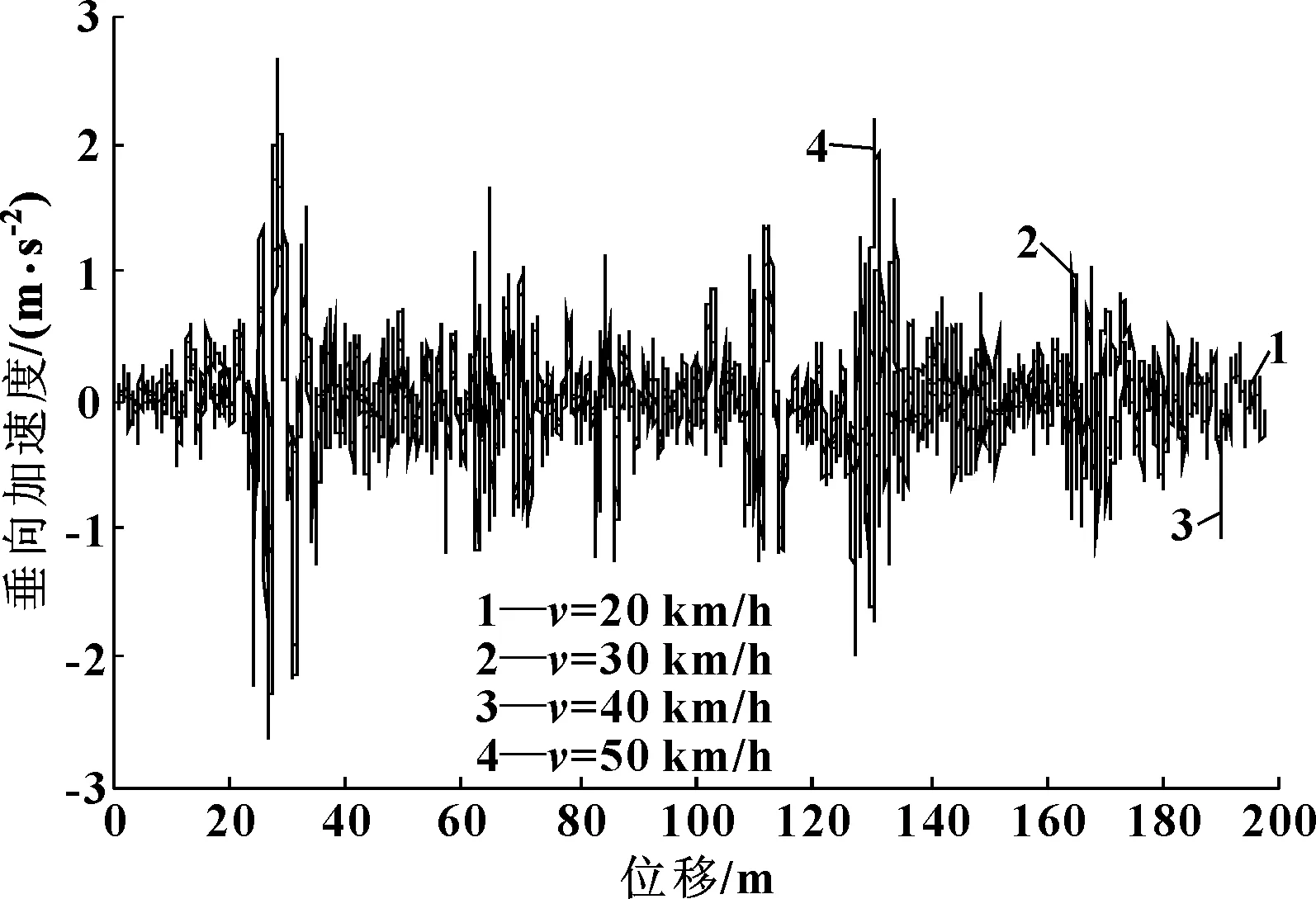
图2 车辆以不同速度经过同一路段时的垂向加速度响应
大量路测试验表明,路面的随机输入和汽车振动响应都基本符合正态分布[18]。图3为某路段路面不平度激励引起车辆垂向振动加速度的分布。因此,可选取出现概率较小但引起车辆振动响应较大且车辆感知重复性较好的路面不平度输入作为地图匹配特征,而选取的两相邻特征点距离应在惯性定位误差较小的距离内,同时应考虑使两相邻路面不平度特征点距离大于GPS/INS定位误差,以避免造成特征误匹配。
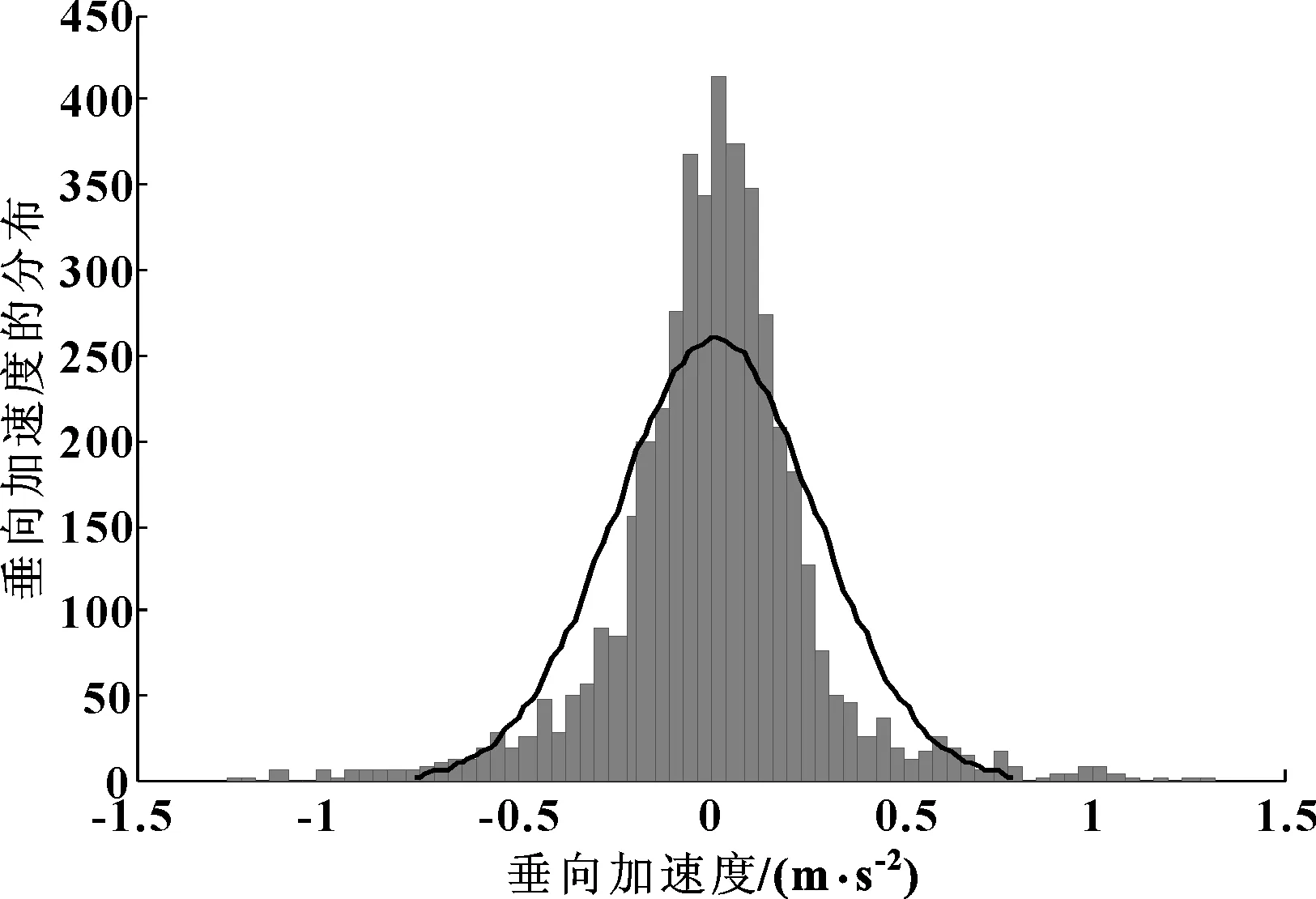
图3 某路段车辆垂向加速度分布
2.2 路面不平度特征处理
图4所示为双轴汽车振动系统的简化,从模型中可以看出车辆垂向振动由前、后轮输入且由于大部分车辆的悬挂质量分配系数ε接近1,因此车辆前后悬挂系统的垂直振动几乎是独立的,即安装于车辆质心处的加速度计测得的车身垂向加速度az为前后车轮输入的两个独立垂向加速度af、ar的分量。而车辆前后轴经过同一路面不平度区域存在时间上的延迟,因此匹配区域路面冲击信号表现为两个连续的脉冲信号,如图5中的两个连续波峰P1、P2,脉冲时间差为轴距/车速,因此可以对车辆垂向加速度信号做相关性分析,降低路面输入噪声。由于较大的路面不平度激励输入频率都偏向低频段,在进行分析前可采用低通滤波降低平整路面激励的影响[19-20]。
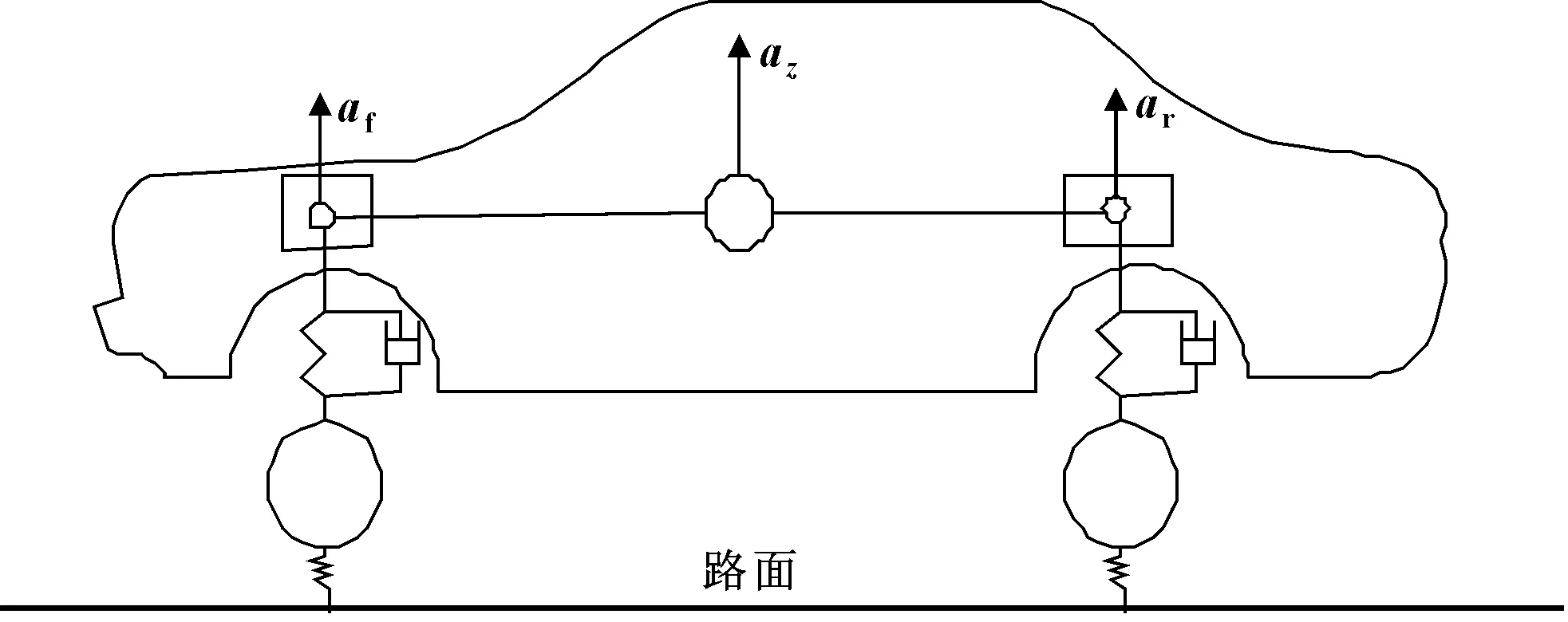
图4 车辆四自由度振动模型
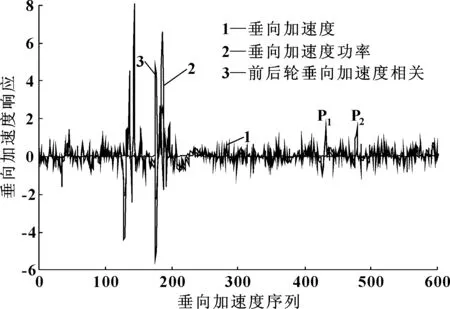
图5 车辆垂向加速度信号分析
求取加速度信号az的功率Pa,提高特征的信噪比,车辆振动信号功率计算公式如下:
(4)
车辆车身垂向加速度功率自相关序列Acor为:
Acor(ti)=Pa(ti)Pa(ti-Δt)
(5)
其中:Δt为前、后轮经过路面某点的时间差为:
(6)
式中:tr为后轮经过路面特征点时刻;tf为前轮经过路面特征点时刻;L为前后轮轴距;v为前、后轮依次经过路面特征点时间段内的平均车速。
图5为车辆垂向加速度经过式(4)—(6)处理后的效果图,可以看出垂向加速度序列经过处理在路面不平度特征点处就有较大的值,且与普通平整路面区别较大。
2.3 地图匹配定位实现
由于不同路段对车辆的振动激励有较大差别,且不同车速下车辆感知的振动加速度信号幅值大小也有区别,为保证车辆对振动特征的准确识别,文中对地图匹配特征点附近路段的车辆振动加速度相关序列进行归一化处理,进而设置路面不平度识别阈值并储存于电子地图中,其中归一化路段的长度为特征点位置前后2倍的定位误差范围。
采用Z-Score归一化方法处理垂向加速度:
(7)

图6为某路段车辆垂向加速度功率自相关序列及其归一化后的序列,归一化后的序列在具有不同幅值垂向加速度响应的路面特征点具有差别不大的匹配判断值。
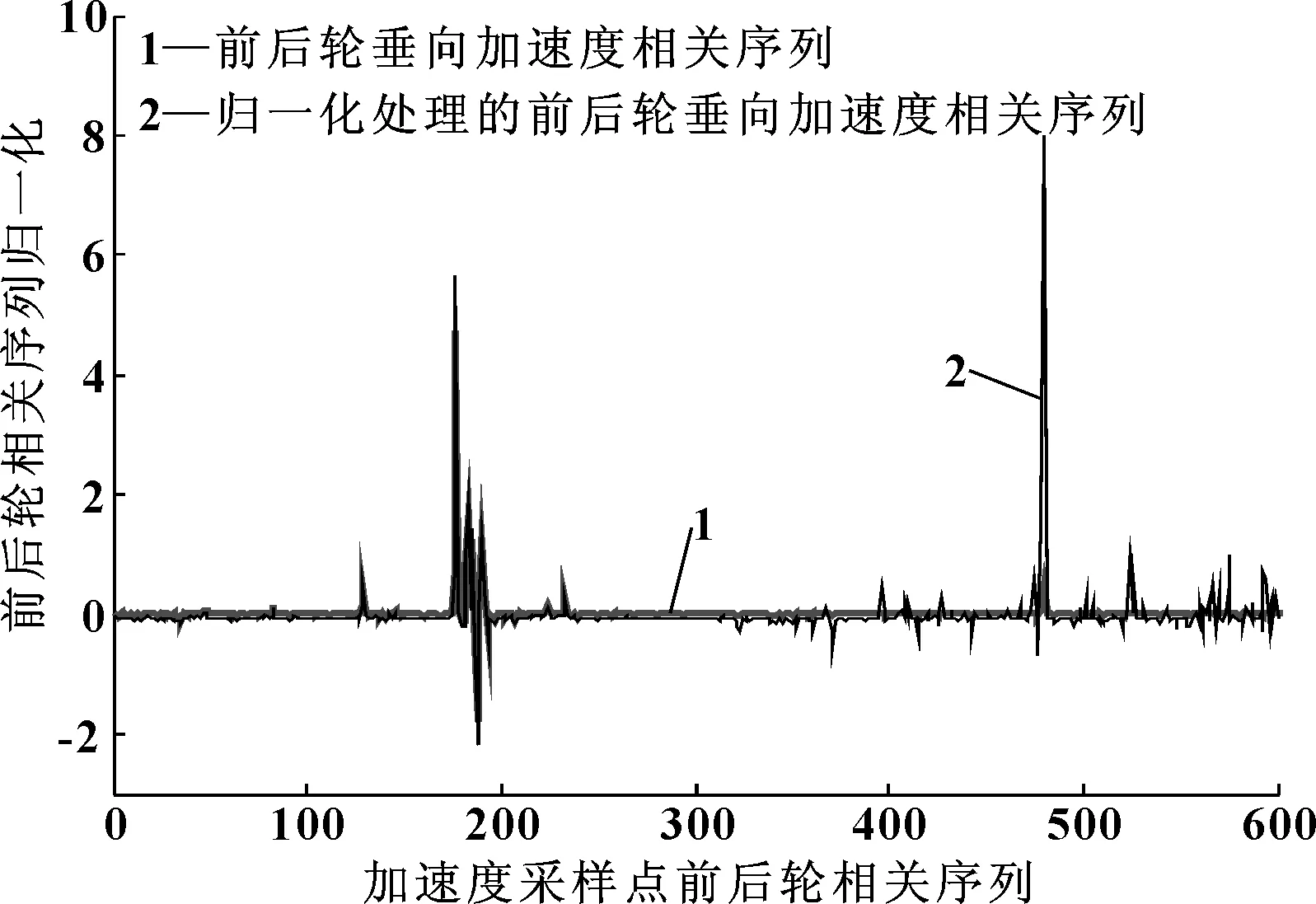
图6 车辆垂向加速度功率自相关序列及其归一化后的序列
车辆行驶时,GPS/INS组合车辆定位可大致确定车辆定位位置,在定位误差范围内对车辆垂向加速度相关序列归一化处理,并搜索超出判断阈值的极值点,该点即为地图上标记的匹配特征点,以该特征点的位置作为定位精确值更新车辆位置(xk+1,yk+1),同时可根据相邻匹配特征点的精确位置校正惯性器件推算误差。
3 试验结果与分析
为验证文中基于路面不平度特征识别的地图匹配定位的精度,利用实车在上海智能网联汽车封闭测试区进行跑车测试,图7为测试路线。其中,高精度地图为包含路面不平度信息的车道级电子地图,地图定位精确到10 cm;GPS接收机为u-blox NEO-M8N;INS的惯性测量单元为Xsens MTi-1、MEMS三轴加速度计及三轴陀螺仪。
试验时,测试车辆沿试车场道路车道中线行驶,以符合地图匹配时假设车辆行驶在道路上的要求。在进行路面特征匹配时,路面特征搜索范围为2倍的GPS/INS误差范围,选取的路面不平度特征识别阈值为3倍的垂向振动加速度响应标准差σAcor,试验路段包含12个匹配特征点,两相邻特征点最远距离为132.86 m。

图7 上海智能网联汽车试车场测试环境
图8、图9为采用路面不平度特征匹配算法车辆定位轨迹与GPS/INS定位、车辆实际轨迹的对比,可以明显看出文中定位方法的行车轨迹与参考轨迹更接近。

图8 路面特征识别/地图匹配、GPS/INS与参考轨迹对比
图10为采用GPS/INS定位与文中GPS/INS/特征匹配定位方法定位误差对比,可以看出文中方法相对GPS/INS的定位精度较高,其中匹配点处的定位误差小于0.2 m,试验结果对比见表1。基于路面特征识别的地图匹配定位,在实验道路上有93.01%的定位点精度小于1 m,达到了高精度定位的效果。
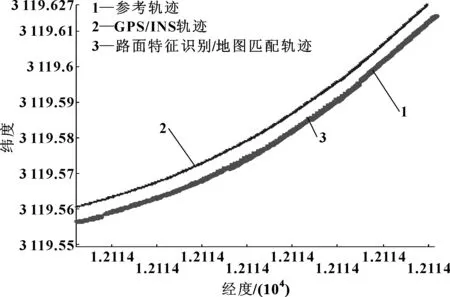
图9 典型匹配路段轨迹对比
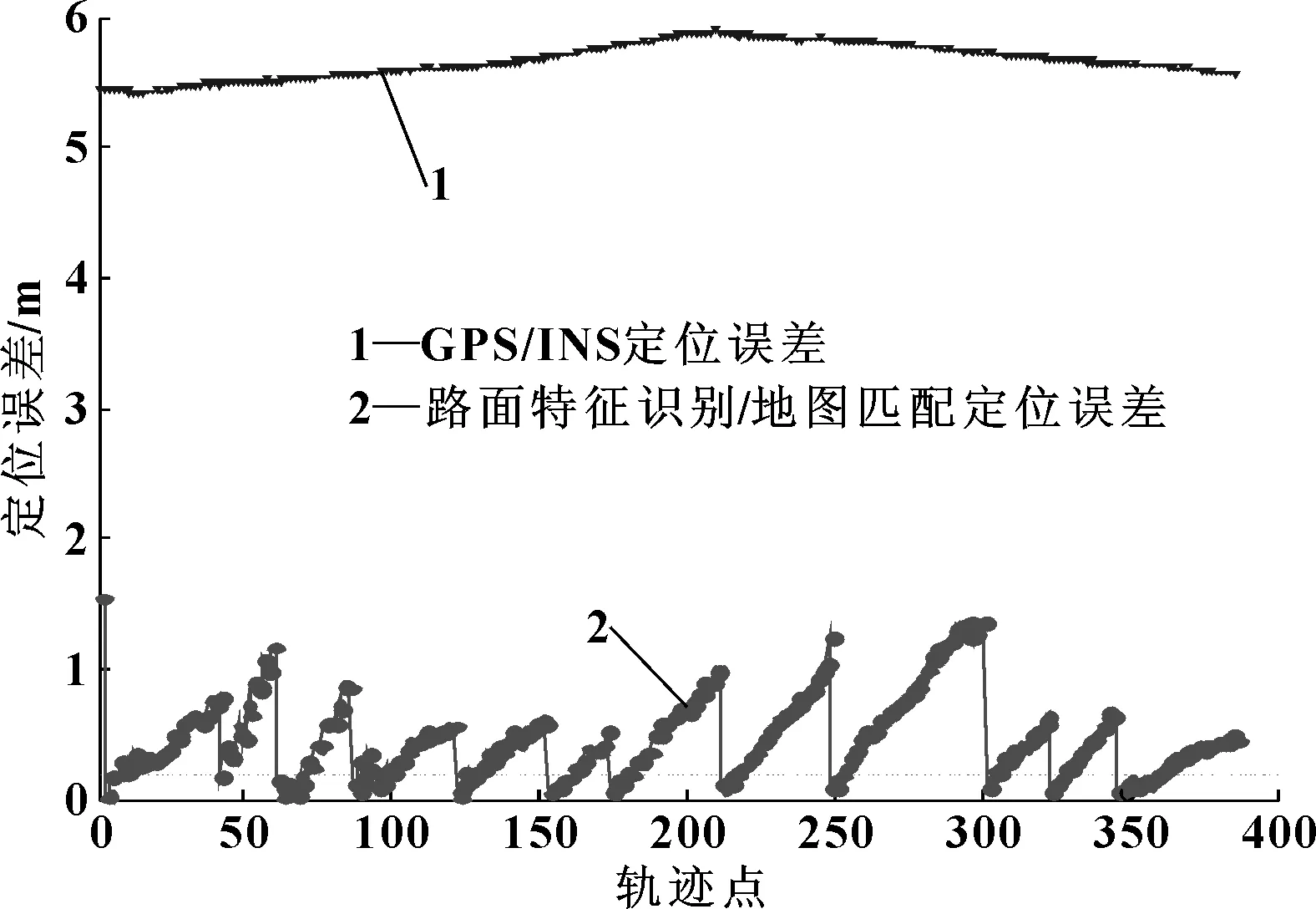
图10 路面特征识别/地图匹配与GPS/INS定位误差对比

定位方法定位误差均值定位误差最大值定位误差小于1m的比例匹配的特征点数目两相邻匹配点间平均距离GPS/INS5.67m5.89m0%——————路面特征识别/地图匹配0.48m1.54m93.01%12132.86m
4 结论
采用在试车场跑车的方式验证了提出的基于路面不平度的地图匹配车辆定位方法,在假设车辆行驶在车道中线上且车辆能获得存储有路面不平度信息的高精度电子地图的前提下,在上海智能网联汽车试车场的1.26 km道路测试结果表明:在GPS/INS定位精度为5 m左右的情况下,通过识别路面不平度与高精度地图存储的先验道路特征信息匹配进行车辆定位,有90%以上的定位点定位精度小于1 m,且匹配点处的定位精度小于0.2 m,证明文中提出的定位方法可以实现高精度定位效果。
【1】AMINIA,de la GARZA J M.Computer Simulations of the Vehicle Localization for Intelligent Transportation Systems[C]//International Conference on Computing in Civil and Building Engineering.Florida,2014:1118-1125.
【2】MATTHAEI R,BAGSCHIK G,MAURER M.Map-relative Localization in Lane-level Maps for ADAS and Autonomous Driving[C]//IEEE Intelligent Vehicles Symposium Proceedings,Dearborn,2014:49-55.
【3】LEE Y C,CHRISTIAND,YU W,et al.Urban Localization Method for Mobile Robots Based on Dead Reckoning Sensors,GPS,and Map Matching[C]//IEEE International Conference on Systems,Man,and Cybernetics.Anchorage,2011:2363-2368.
【4】LI Q,FANG Z,LI H,et al.Integrating GPS,GYRO,Vehicle Speed Sensor,and Digital Map to Provide Accurate and Real-time Position in an Intelligent Navigation System[C]//Proceedings of SPIE—The International Society for Optical Engineering,2005.
【5】ZHANG X,WANG Q,WAN D.Map Matching in Road Crossings of Urban Canyons Based on Road Traverses and Linear Heading-Change Model[J].IEEE Transactions on Instrumentation & Measurement,2008,56(6):2795-2803.
【6】王楠,王勇峰,刘积仁.一个基于位置点匹配的地图匹配算法[J].东北大学学报(自然科学版),1999,20(4):344-347. WANG N,WANG Y F,LIU J R.A Point-based Map-matching Algorithm[J].Journal of Northeastern University(Natural Science),1999,20(4):344-347.
【7】孙棣华,张星霞,张志良.地图匹配技术及其在智能交通系统中的应用[J].计算机工程与应用,2005,41(20):225-228. SUN D H,ZHANG X X,ZHANG Z L.Map Matching Technology and Its Application in ITS[J].Computer Engineering and Applications,2005,41(20):225-228.
【8】苏奎峰,邓志东,黄振.基于曲率特征的自主车辆地图匹配定位方法[J].机器人,2012,34(4):440-448. SU K F,DENG Z D,HUANG Z.A Novel Localization Approach for Autonomous Vehicles Based on Map Matching with Curvature Features[J].Robot,2012,34(4):440-448.
【9】KNAUP J,HOMEIER K.Road Graph-Graph Based Environmental Modelling and Function Independent Situation Analysis for Driver Assistance Systems[C]//IEEE Conference on Intelligent Transportation Systems.Funchal,2010:428-432.
【10】KUHNT F,KOHLHAAS R,JORDAN R,et al.Particle Filter Map Matching and Trajectory Prediction Using a Spline Based Intersection Model[C]//International IEEE Conference on Intelligent Transportation Systems.Qingdao,2014:1892-1893.
【11】PEKER A U,TOSUN O,AKIN H L,et al.Fusion of Map Matching and Traffic Sign Recognition[C]//IEEE Intelligent Vehicles Symposium.Dearborn,2014:867-872.
【12】PENG J,El NAJJAR M E,CAPPELLE C,et al.A Novel Geo-localization Method Using GPS,3D-GIS and Laser Scanner for Intelligent Vehicle Navigation in Urban Areas[C]//International Conference on Advanced Robotics.Munich,2009:1-6.
【13】RIEUX V,CARBON C,AZOULAY-DUPUIS E. Intelligent Geolocalization in Urban Areas Using Global Positioning Systems,Three-dimensional Geographic Information Systems,and Vision[J].Journal of Intelligent Transportation Systems,2010,14(1):3-12.
【15】DEAN A J,MARTINI R D,BRENNAN S N.Terrain-based Road Vehicle Localization Using Particle Filters[C]// American Control Conference.Seattle,2008:236-241.
【16】贺勇,路昊,王春香,等.基于多传感器的车道级高精细地图制作方法[J].长安大学学报(自然科学版),2015(S1):274-278. HE Y,LU H,WANG C X,et al.Generation of Precise Lane-level Maps Based on Multi-sensors [J].Journal of Chang’an University(Natural Science Edition),2015(S1):274-278.
【17】JO K,SUNWOO M.Generation of a Precise Roadway Map for Autonomous Cars[J].IEEE Transactions on Intelligent Transportation Systems,2014,15(3):925-937.
【18】余志生.汽车理论[M].北京:机械工业出版社,2006:211-216.
【19】张立军,陈华杰,刁坤,等.电动汽车动力电池振动与冲击问题研究综述[J].电源技术,2013,37(1):156-160. ZHANG L J,CHEN H J,DIAO K,et al.Review of Vibration and Shock Dynamics of Electric Vehicles Battery[J].Chinese Journal of Power Sources,2013,37(1):156-160.
【20】KATRANITSAS P F,ORDYS A W,DARNELL P M,et al.Road Gradient Detection Using Kalman Filter[C]//Eurocon.IEEE,2013:1492-1497.
Application of Road Roughness Recognition and Map Matching in Vehicle Positioning
LI Shuaishuai, BAO Chen, SHEN Yong
(School of Automotive Studies, Tongji University, Shanghai 201804, China)
With the increasing of localization precision and information variety, digital map is used for vehicle positioning, and is of great value in improving vehicle positioning accuracy and stability. Based on high-precision electronic map and GPS/INS combined positioning method, a method that through analyzing vehicle vertical vibration caused by road roughness to identify the road features was proposed,then they were matched with the road surface data stored in the map, to complete the high precision and reliable vehicle localization. Road test results show that the method can use the information of the electronic map effectively, and can obtain the vehicle positioning data with a high degree of accuracy, especially when the GPS/INS positioning under the condition of low precision.
Vehicle positioning; Map matching; Road roughness recognition; High-precision map
2016-12-01
上海市科学技术委员会项目(13DZ1108000)
李帅帅(1991—),男,硕士研究生,专业方向为汽车电子-车载信息技术。E-mail:liss1810@foxmail.com。
10.19466/j.cnki.1674-1986.2017.01.003
U495
B
1674-1986(2017)01-013-05
