基于平面方程的轮对在线检测标定系统设计*
2017-02-18吴开华陈强元
吴开华, 陈强元
(杭州电子科技大学 生命信息与仪器工程学院,浙江 杭州 310018)
基于平面方程的轮对在线检测标定系统设计*
吴开华, 陈强元
(杭州电子科技大学 生命信息与仪器工程学院,浙江 杭州 310018)
在基于光截图像的轮对在线检测系统中,由于现场安装环境的限制,使得摄像机拍摄得到的轮对轮廓曲线畸变严重,所以摄像机的标定方法与精度直接影响到轮对参数测量结果。结合测量现场实际情况,分析设计了整套标定系统,并提出了基于平面方程系数的摄像机标定算法,实现了摄像机参数的标定工作。经验证:该标定系统的标定精度在0.1 mm以内,满足轮对在线检测对标定精度的要求。
轮对在线检测; 标定系统; 平面方程
0 引 言
随着科学技术的发展,列车的高速化和重载化对列车状态提出了更高的要求,轮对磨耗状态是其中一个重要因素。基于光截图像测量的车辆轮对磨耗在线检测技术是目前研究的重点之一[1]。而摄像机标定系统是其中一项关键步骤,标定系统的精度直接影响轮对磨耗检测的精度。
现在常用的摄像机标定系统大都采用基于小孔成像原理构建的摄像机成像模型,使用非线性优化求解摄像机内参来完成摄像机的标定[2,3]。为了能够提高摄像机标定的标定精度,一方面人们通过改进特征点的获取方式来提高特征点的位置提取精确[4~6]。另一方面,针对摄像机成像模型参数的优化方法也会影响摄像机参数的标定精度[7,8]。
但是在车辆轮对磨耗在线检测场合,受场地限制,摄像机俯仰角较大。这个摄像机标定的结果带来了更多的不确定因素[9]。本文结合现场安装位置要求和光截曲线关键点区域分布情况,设计了基于平面方程系数的摄像机标定系统。该标定系统根据摄像机出产内参数,通过光学成像原理求取标定板平面方程,进而完成标定工作。并设计了相关标定板以及整套系统结构装置,该标定装置结构简单,标定精度较高。
1 标定系统设计
整个标定系统的结构设计就是需要对摄像机和激光光源的参数以及安装位置进行设计。由于是在线检测装置,所以整个装置必须在不影响车辆正常运行前提下获取轮廓图像。并且铁轨和枕木的存在对摄像机和激光源的安装位置与角度有了一些限制。首先应选择摄像机和激光源的安装区域,然后结合被测轮对轮廓曲线的大小确定摄像机视场大小,根据检测精度确定物距焦距以及CCD分辨率,从而确定摄像机和激光源安装位置。它们的相对位置示意图如图1所示。

图1 摄像机和激光源位置示意图
L和C分别代表激光源出光点和摄像机光心在切面上的投影点,轮对半径为R。由于不能影响车辆正常运行,设备须安装于铁轨平面以下,设计L和C所在水平面于铁轨面的距离为h2。使光平面穿过轮对轴心,与轮对相交距轨道面为h1的点A,从而避免铁轨或枕木阻挡激光源的照射。而摄像机拍摄的方向为轮对过A点的切线方向,为保证摄像机拍摄的轮对光截曲线压缩较小,设计L点和C点的间距为L1。激光源和摄像机位于轨道面下方,必须远离铁轨一定的距离,才能保证在照射轮对和采集图像时,不会被铁轨遮挡。根据现场的试验数据,设计摄像机和激光源安装与轨道内侧。激光源出光点与铁轨内侧面水平距离为y1,激光面与水平面的有一夹角a1,保证光平面能穿过轮对轴线。设计摄像机光心距离轨道内侧面为y2,并使摄像机光轴与水平面有一个夹角a2,保证摄像机可以拍摄到信息较全的轮对外形光截曲线,利于后期图像处理和轮对几何参数的求取。
2 基于平面方程系数标定算法
在理想光学系统中根据光学成像原理可知,垂直于光轴ZC的物平面ΠW上的物所成的共轭平面ΠC上的像的几何形状完全与物相似,也就是说图2中的△AWBWCW∽△ACBCCC,且相似比与放大倍率β相等。
又根据高斯公式:物距的倒数(1/u)加上像距的倒数(1/v)等于焦距的倒数(1/f)。由于在计算机视觉测量系统中,摄像机物距远远大于像距,此时像距(v)近视等于焦距(f),即成像在焦平面上。在车辆轮对磨耗在线检测场合中,由于场地限制,摄像机光轴俯仰角较大,其方程求解光路图如图2所示。
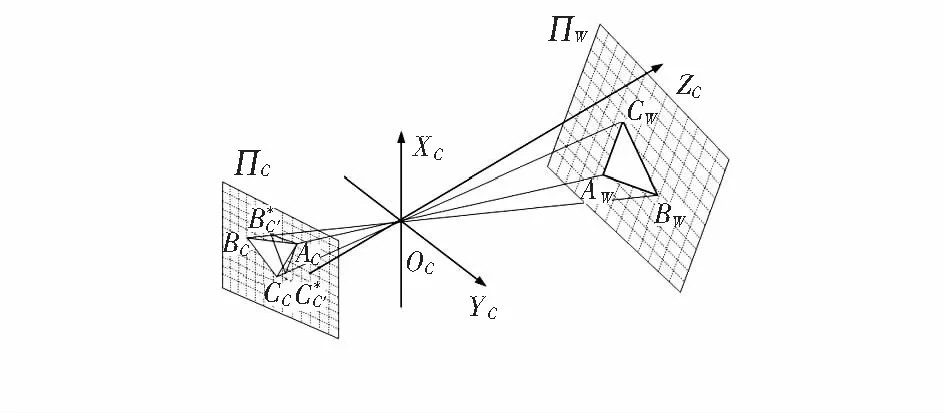
图2 平面方程求解光路图
假设AW,BW,CW点对应的像点坐标分别为AC(XAC,YAC),BC(XBC,YBC),CC(XCC,YCC)。在摄像机坐标系OC-XCYCZC中,假设AC点固定不动,BC,CC两点分别沿着各自所在的成像光线上移动,当△AWBWCW∽△ACBCCC时停止,此时BC位于BC',CC位于CC',偏移量分别为DZB,DZC。则点BC',CC', 在该坐标系下的坐标分别为(XBC',YBC',ZBC'),(XCC',YCC',ZCC'),其中
(1)
通过图像处理可以得到AC,BC,CC的坐标值,上式中仅有DZB和DZC两个未知数。由于△AWBWCW∽△ACBCCC有
(2)
由式(1)、式(2)可以计算出DZB,DZC和相似比β。可进一步得空间中物点AW的坐标。按照同样的步骤,同理得出大于3个特征点在该坐标系下的坐标后,就可拟合确定物平面在该坐标系下的平面方程
P1x+P2y+P3z+P4=0
(3)
又因物点(XW,YW,ZW)、像点(xi,yi,f)、光心OC(0,0,0)三点共线,有直线方程如下
(4)
物点在所求得的标定板平面上,联立方程(3)、方程式(4)并求解,即可实现在摄像机坐标系下物点坐标与像点坐标之间的转化。再通过最小二乘法求取坐标系旋转矩阵R,即可将点A的坐标在摄像机坐标系与标定板平面坐标系(世界坐标系)之间相互转化,转换过程如下
(5)
综上所述,基于标定板平面方程求解的摄像机标定就是通过获取式(3)中的平面系数P1~P4和坐标旋转矩阵R来实现从像点像素坐标(u,v)到空间中物点坐标(XW,YW)之间的对应映射关系,完成摄像机的标定。
3 标定实验与精度分析
3.1 实验设计
摄像机标定系统结构图如图3(a)所示,将标定板竖直安装在轨道面上,摄像机固定安装在标定板左下侧,d(mm)为延光轴方向摄像机光心到标定板距离,l3(mm)为摄像机光心所在水平面与图3中A点间距离,y2(mm)为摄像机光心距离铁轨表面的距离,且
c=y2/tan(a2)=l3tan(a2)/tan(b2)
(6)

图3 标定系统结构图
其中单位像元大小dx×dy(mm×mm)的选择必须小于等于检测精度的1/3。且摄像机所选的分辨率m×n、视场大小a×b(mm×mm)、镜头焦距f(mm)和单位像元大小dx×dy(mm×mm)须满足
(7)
摄像机获取标定板图案图像后,经过图像处理获取特征点图像坐标,按照基于平面系数标定算法求取标定结果。整个系统流程图如图4所示。

图4 标定系统流程图
图5所示为安装现场尺寸设计的标定系统验证装置。根据现场实际情况,调整摄像机和标定板的相对位置,使他们的空间距离l3,y2,c长度分别为450(±5),75(±5),180(±5)mm,使得俯仰角θ处于66°左右,线段d为相机光轴。调整摄像机与标定板的相对位置,拍摄标定板图像,对特征点进行提取计算。

图5 实验装置图
通过对摄像机获取的图像进行处理,用特征点A1~A20的图像坐标进行摄像机标定,获取参数P1~P4和R。用剩余未参与计算的B1~B15来验证,各特征点位置如图3(b)所示。将B的图像坐标值(Ui,Vi)代入到式(1)、式(3)、式(4)、式(5)中,计算该特征点在测量坐标系中的坐标(XCPi,YCPi),将该坐标与其实际坐标 (XPi,YPi)进行对比,得到摄像机标定的精度评价结果
(8)
式中 n为验证标定精度的特征点数量。
3.2 实验结果
实验采用的摄像机型号为CM—140GE,单位像素长度dx=dy=4.65μm,分辨率为1 392×1 040,焦距为f=25mm的定焦镜头,按照实验设计的参数调整摄像机与标定板的相对位置,对标定板进行拍摄。再对图像进行滤波、二值化、边缘提取等处理,通过各圆相互之间的外切点间接求得特征点的像素坐标(Ui,Vi)。整个图像处理的过程如图6所示。
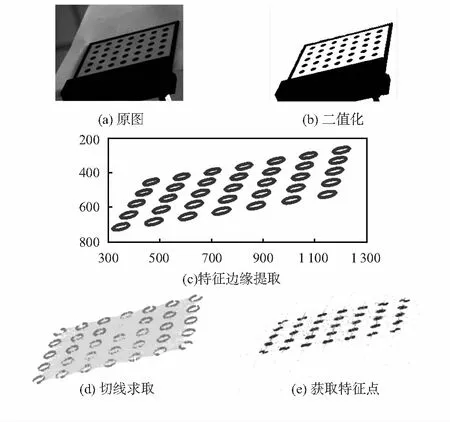
图6 图像处理过程
特征点A1~A20的图像坐标Ai(Ui,Vi)通过式(6)求取特征点在摄像机坐标系下相应的坐标值Ac(xi,yi)。将Ac(xi,yi)代入式(1)、式(2)、式(3)中,解得各物点在摄像机坐标系下的坐标值AW(Xi,Yi,Zi)。通过AW拟合出标定板平面方程系数P1~P4。将Ac代入式(4)、式(7),重新计算AW(Xi,Yi,Zi),最后将AW和特征点A1~A20在标定板上的坐标AP(XP,YP)代入式(8)求取旋转矩阵R。如表1所示。
表1 摄像机标定结果

参数P1P2P3P4R结果-1.21-3.011.44-705.90-1.2354 -0.5542 0.0598 0.5203 2.2021 0.0457-0.0017 -0.0043 0.0020æèçöø÷
3.3 数据统计分析
为了验证标定系统的标定精度,取标定板上特征点B1~B15(Xbci,Ybci)的图像坐标代入标定出的摄像机参数,反推出它们在测量坐标系中的坐标(xbwi,ybai)。将获得的坐标与实际坐标进行对比,|ΔX|和|ΔY|分别为该点的X坐标值和Y坐标值的偏差,其中
(9)
表2为该次实验数据的误差统计结果。
表2 标定精度

特征点B1B2B3B4B5B6B7B8B9B10B11B12B13B14B15|ΔX|0.010.000.010.010.030.020.020.020.020.010.020.010.000.000.01|ΔY|0.020.040.060.040.040.060.000.030.070.010.000.060.060.070.07Δ0.020.040.060.040.050.060.020.030.070.010.020.060.060.070.07
重复进行上述实验,将所得数据按照式(8)计算出Etm。图7为分别进行10~100次的精度评价值对比折线图。
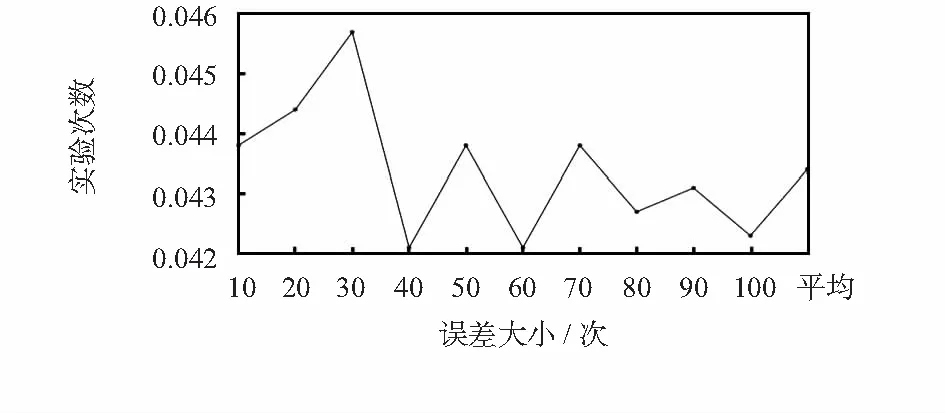
图7 精度评价折线图
从上面结果来看,在摄像机俯仰角较大情况下,本文所述的标定算法精度评价系数值Etm小于0.05mm。经实验最大偏差Δ为0.07mm。标定精度适用于轮对磨耗在线检测系统。
4 结 论
基于光截图像测量技术的轮对在线检测中,摄像机俯仰角较大,基于摄像机焦距等相关参数的小孔成像模型的标定算法的摄像机标定结果带来了更多的不确定因素。本文根据光学成像原理,设计了基于标定板平面方程系数的摄像机标定系统。通过成像光线与平面方程的交点确定物像关系,完成摄像机与标定板相对位置的模型标定。经验证,基于平面方程系数求解的摄像机标定系统的标定精度适用于轮对磨耗在线检测系统。
[1] 张甬成.车辆轮对动态检测装置—LY系列轮对动态检测系统的研究[D].成都:西南交通大学,2011.
[2]ZhangZ.Cameracalibrationwithone-dimensionalobjects[J].IEEETransactionsonPatternAnalysis&MachineIntelligence,2004,26(7):892-899.
[3] 刘顺涛,骆华芬,陈雪梅,等.结构光测量系统的标定方法综述[J].激光技术,2015,39(2):252-258.
[4]WangJ,ShiF,ZhangJ,etal.Anewcalibrationmodelofcameralensdistortion[J].PatternRecognition,2008,41(2):607-615.
[5] 张维忠,赵志刚,油世明,等.绕光轴旋转拍摄LCD上平面靶标实现相机标定[J].仪器仪表学报,2011,32(1):120-125.
[6] 夏仁波,刘伟军,赵吉宾,等.基于圆形标志点的全自动相机标定方法[J].仪器仪表学报,2009,30(2):368-373.
[7] 崔彦平,林玉池,张晓玲.基于神经网络的双目视觉摄像机标定方法的研究[J].光电子·激光,2005,16(9):1097-1100.
[8]BouchouichaM,KhelifaMB,PuechW.Anon-linearcameracalibrationwithgeneticalgorithms[C]∥SymposiumonSignalProcessingandItsApplications,2003:189-192.
[9] 王 鹏,张求知,李文强,等.基于成像光线空间追踪的摄像机标定方法研究[J].仪器仪表学报,2015,36(1):224-229.
Design of calibration system of wheel set online detection based on plane equation*
WU Kai-hua, CHEN Qiang-yuan
(College of Life Information Science and Instrument Engineering,Hangzhou Dianzi University,Hangzhou 310018,China)
In wheel set online detection based on structured light interception image technique,due to the space restraint, it made the wheel set light-section curves acquired are heavily distorted.Wheel set profile curve taken by camera has serious distortion,so camera calibration method and calibration precision will directly affect wheel set parameters online detection result.Combining with practical situation,the calibration system is analyzed and designed and propose a new camera calibration algorithm which is based on the coefficient of plane equation,camera calibration work is realized.It is verified that the calibration precision of the calibration system is within 0.1 mm,it meet the demands for wheel set online detection.
wheel set online detection; calibration system; plane equation
10.13873/J.1000—9787(2017)02—0097—04
2016—03—18
国家自然科学基金资助项目(61372155)
TP 274
A
1000—9787(2017)02—0097—04
吴开华(1968-),男,教授,主要从事光电检测技术及仪器研究工作。
陈强元(1990-),男,通讯作者,硕士研究生,E—mail:279606200@qq.com。
