改进UKF算法在PMLSM无位置传感控制中的应用*
2017-02-18王桂荣李建勇
王桂荣, 李建勇
(中国计量学院 机电工程学院,浙江 杭州 310018)
改进UKF算法在PMLSM无位置传感控制中的应用*
王桂荣, 李建勇
(中国计量学院 机电工程学院,浙江 杭州 310018)
针对永磁直线同步电机(PMLSM)的无位置传感控制,提出了一种基于改进无迹卡尔曼滤波(UKF)算法的永磁直线同步电机的动子速度和位置估计方法,对永磁直线同步电机的动子速度和位置进行估计。相比于传统的UKF算法,改进UKF算法在采样点的获取上进行了改进,在采样点的获取上运用了球形采样策略,而非传统的平方根对称采样策略,极大减少了采样点的数量,减少了状态估计过程中算法的计算量,在估计性能相当的情况下,改进的球形采样策略UKF算法较传统的平方根对称采样UKF算法在永磁同步直线电机无位置传感实时控制系统中有明显优势,取得良好的控制效果。
永磁直线同步电机; 改进无迹卡尔曼滤波; 无位置传感控制
0 引 言
直线同步电机作为直线传动装置,相比于传统的“旋转电机与滚珠丝杠”的直线传动组合有精度高、推力大、响应快等优点,已经被越来越多的应用于直线驱动以及高精度加工场合[1]。然而机械物理传感器实现的位置、速度反馈构成的闭环系统,增加了系统的成本,同时机械物理传感器易受环境的影响,对系统的可靠性带来了不稳定因素,因此,无位置传感技术取代传统的物理传感器研究变得有意义。
目前基于电机数学模型的滤波状态估计算法在永磁同步电机的无位置传感控制中被广泛研究。文献[2]中将扩展卡尔曼滤波(extended Kalman filtering,EKF)应用于永磁同步电机的无位置传感控制中,取得了良好的效果,然而EKF需要计算雅可比矩阵,不利于工程上的实现,同时EKF算法对系统线性化后进行一阶截断,这样容易产生较大误差,使系统不稳定。针对EKF算法的以上问题,Juelier S J等人[3]提出了一种无迹卡尔曼滤波算法(unscented Kalman filtering,UKF),用于非线性滤波。UKF采用确定性的采样策略,通过非线性模型实现状态均值和方差的递推更新,降低了非线性误差。UKF在高精度的永磁直线同步电机(permanent magnetic linear synchronous motor,PMLSM)无位置传感控制系统的状态估计研究较少,同时为了满足PMLSM的实时控制与误差补偿,算法的计算量有待进一步降低,因此,文中提出了一种基于球形采样策略的UKF算法用于PMLSM无位置传感控制系统的动子速度和位置估计,来进一步降低传统平方根对称采样策略UKF算法估计过程的算法计算量,并进行了仿真实验研究。
1 改进UKF算法
改进的UKF算法采用球形采样策略,从状态点的分布中取采样点。假设非线性系统模型为
xk=f(xk-1,k-1)+v(k-1)
(1)
zk=H(xk,k)+ω(k)
(2)
式中v(k)为系统的过程噪声,ω(k)为输出观测噪声,f(·)为系统的状态转移矩阵,H(·)为系统的输出矩阵。假设v(k),ω(k)的均值为零。文献[4]指出,如果对于n维的状态向量,至少需要n+1个采样点才能确定状态向量的后验分布。改进的UKF算法采用球形采样策略,算法采样策略过程如下:
1)选择初始权系数W0∈[0,1]。W0是一个自由变量,它影响的采样点的四阶或者更高阶数。
2)选择其余权系数
W(i)=1-W/(n+1)
(3)
3)初始化一元向量
(4)
4)对于j从2~n的取值,获得向量σ的过程如下
上面递推结束后将得到n维向量σ,同时得到了n+2个采样点。当W(0)=0时,实际参与UT变换的点只有n+1个点,对于权值,除了W(0)外,其余的权值都是相等的。改进的滤波算法在采样策略上加以改善提高,可以进一步降低采样点的数量,减少计算量,从而满足系统的实时性要求,很大地提高了工程上的实现可能。
2 PMLSM数学模型
在静止α-β坐标系下,对于隐极式永磁直线同步电机的电机电压方程为
(8)
(9)
式中uα,uβ,iα,iβ分别为静止α-β坐标系下定子电压、定子电流;L,R,ψf,τ分别为定子电感、定子电阻、定子永磁体磁链、极距。文中选取了磁链信息作为状态向量,对式(8)、式(9)整理得
(10)
(11)
考虑到电机的机械速度时间常数远大于电磁过程的时间常数,速度的变化率远小于滤波器的采样频率,因此假设速度的导数为零[5]。建立了以[ψαψβvx]为状态向量,α-β坐标系下电流iα,iβ作为观测量的PMLSM的状态空间方程,如式(12)所示
(12)
在电机控制过程中霍尔传感器可以实现对电机大电流的测量,在电机控制、保护、监测、动力管理等方面有着重要的作用[6]。从式(12)可以看出,PMLSM是一个四阶的非线性系统。为了实现算法模型的数字化,对状态空间方程进行离散化。假设采样周期为足够小的时间量T,且假设在采样时间间隔内,控制信号的大小是不变的,采用一阶欧拉积分实现对电机模型方程的离散化[7]。
3 PMLSM状态估计仿真研究
PMLSM控制系统采用id=0的最大推力控制策略,通过对q轴、d轴的电流控制,互不影响的改变相应的磁链。系统的速度控制器和电流控制器分别采用PI控制器,如图1所示的选取一种表面贴装式PMLSM进行仿真研究,电机的参数如表1所示。

图1 PMLSM控制系统
算法初始估计时必须先给定状态的初始值x0和误差协方差阵的初始值P0。系统状态的初始值选取永磁直线
表1 电机参数
电机参数数值电机参数数值电阻R/Ω2.75极距τ/m0.0016电感L/mH2.67动子质量M/kg25永磁磁通ψf/Wb0.303磁场常数B/(N·s/m)4反电势常数Ke/(V·s/m)59.5
同步电机实际的初始值作为状态向量的初始值x0=[0.303 0 0 0]。初始状态误差对估计的影响主要依靠初始状态误差的协方差P0进行修正,误差协方差矩阵为非负定方阵,现假定P0为对角矩阵。本文选取P0的初值P0=diag{ ([0.1 0.1 0.008 0.001])}。
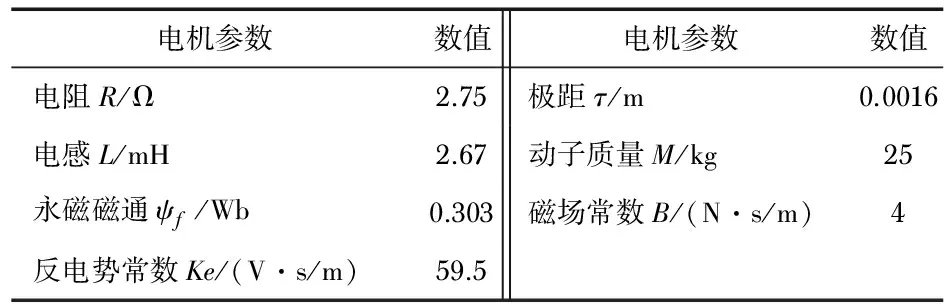
算法设计中,噪声方差阵Q和R对估计的性能影响很大,选择不当会导致滤波器发散。而过程噪声和测量噪声的统计特性是很难确定的,在应用时Q和R阵是通过反复试验来确定[8]。文中选取Q和R阵为:Q=diag([5.24×10-55.24×10-51.355×10-23×10-5]),R=diag([4×10-44×10-4]),在1 m/s速度下进行仿真实验,图2和图3展示的是电机的实际速度(v)、估计速度vesti和速度误差verro以及实际位置x,估计位置xesti以及位置误差xerro的仿真结果。
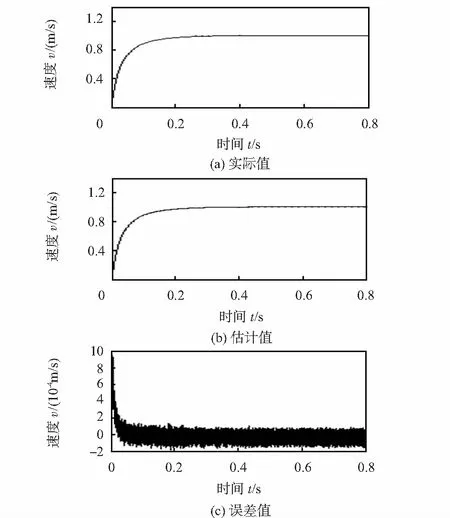
图2 v=1 m/s时算法对速度估计情况
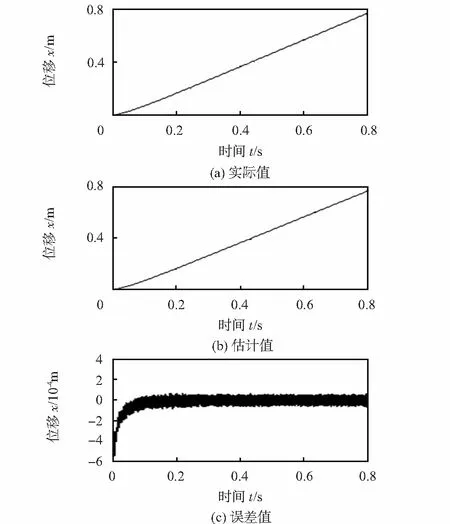
图3 v=1 m/s时算法对位置估计情况
上述曲线表明:在1 m/s的速度下,算法的位置和速度估计在有限的时间内误差是收敛的,且有较高估计精度,验证了本文所提出的基于改进的UKF算法的PMLSM的速度和位置观测器能够在误差允许的范围内准确估计电机动子的速度和位置,所构成的系统具有很好的动静态性能。
4 结 论
提出了一种基于改进的UKF算法的PMLSM的无位置传感速度和位置的估计方法,并进行了仿真实验研究,实验证明:改进的UKF算法在PMLSM无位置传感控制中,能有效地对速度和位置进行估计,有较高的估计精度,对于电机控制的实时性要求有很好的满足。
[1] 叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2000:1-4.
[2] Idkhajine L,Monmasson E,Maalouf A.Fully FPGA-based-sensorless control for synchronous AC drive using an extended Kalman filter[J].IEEE Transactions on Industrial Electronics,2012,59(10):3908-3918.
[3] Julier S J,Uhlmann J K.A new approach for filtering nonlinear system[C]∥Proc of the American Control Conference,Seattle:American Automatic Control Council,1995:1628-1632.
[4] Julier S J,Uhlmann J K.Reduced sigma points filters for the pro-pagation of means and covariances through nonlinear transformations[C]∥Proc of American Control Conference,Jefferson:American Automatic Control Council,2002:887-892.
[5] 张 猛,肖 曦,李永东.基于扩展卡尔曼滤波器的永磁同步电机转速和磁链观测器[J].中国电机工程学报,2007,27(36):36-40.
[6] 郭 军,刘和平,刘 平.基于大电流检测的霍尔传感器应用[J].传感器与微系统,2011,30(5):142-145.
[7] 陆华才.无位置传感器永磁直线同步电机进给系统初始位置估计及控制研究[D].杭州:浙江大学,2008:61-63.
[8] 贾洪平,贺益康.一种适合DTC应用的非线性正交反馈补偿磁链观测器[J].中国电机工程学报,2006,26(1):101-105.
李建勇,通讯作者,E—mail:ljy365292393@163.com。
Application of modified UKF algorithm in PMLSM sensorless control*
WANG Gui-rong, LI Jian-yong
(College of Mechanical & Electrical Engineering,China Jiliang University,Hangzhou 310018,China)
In view of sensorless control of permanent magnetic linear synchronous motor(PMLSM),put forward a speed and position estimation method based on modified unscented Kalman filtering(UKF)to estimate moving speed and position.Compared to conventional UKF algorithm,the modified UKF algorithm improves at obtaining of sampling point.It uses spherical sampling strategy for obtaining sample points,rather than traditional square root symmetric sampling strategy.It greatly reduces number of sampling points,and reduce calculation of state estimation process.When the estimation properties are equivalent,the modified spherical sampling strategy UKF algorithm is better than the traditional square root symmetric sampling UKF algorithm in permanent magnet linear synchronous motor sensorless real-time control system has obvious advantages and obtain good control effect.
permanent magnet linear synchronous motor(PMLSM); modified unscented Kalman filtering(UKF); sensorless control
10.13873/J.1000—9787(2017)02—0158—03
2016—03—04
国家自然科学基金资助项目(61203113); 浙江省自然科学基金资助项目(LY15F03001)
TM 341; TP 13
A
1000—9787(2017)02—0158—03
王桂荣(1975-),女,工学博士,副教授,从事嵌入式系统的开发与应用、交流电机驱动控制工作。
