永磁同步电机系统的无速度传感器研究
2017-02-18张志伟张天一
张志伟, 张天一
永磁同步电机系统的无速度传感器研究
张志伟, 张天一
(天津大学 电气与自动化工程学院,天津 300072)
为了提高永磁同步电机系统的抗干扰能力,提出一种无速度传感器方法,用于速度辨识。将滑模(SM)变结构控制与模型参考自适应系统(MRAS)方法相结合,选取电机本体作为参考模型,利用逆变器输出的电压和电流,构建基于磁链方程的可调模型,利用两模型误差运用SM变结构方法辨识速度。在Matlab仿真平台对无速度传感器方法进行了分析,研究结果表明:所提出的无速度传感器方法具有较好的动静态性能,可以实现对速度的准确辨识。
永磁同步电机; 滑模变结构; 模型参考自适应系统; 无速度传感器
0 引 言
为了实现对永磁同步电机系统控制的目的,工业的控制系统一般会安装速度传感器,这会使永磁同步电机系统的性能依赖于速度传感器。一旦速度传感器故障或者速度传感器传出的转子位置信号失准,就会导致控制失败。同时,速度传感器也会增加系统的成本,影响系统的可靠性。从这个角度来看,转子速度信号利用控制方法来实现将成为降低永磁同步电机系统风险的一个有效的后备解决方案。事实上,利用控制方法实现对永磁同步电机转子速度检测的方法,即无速度传感器控制法,已经成为重要的研究方向[1,2]。
目前无速度传感器控制方法主要有:基于反电动势算法、高频注入法、扩展卡尔曼滤波器法、滑模(SM)观测器法、模型参考自适应系统(MRAS)法等控制方法[3~7]。在诸多无速度传感器控制技术中,MRAS具有结构简单,运算量低等优点,成为一种常用的无速度传感器控制方法[8]。传统MRAS方法存在PI控制器调节困难问题,并且受系统参数变化及工作情况变化影响难以达到最佳性能。
本文在传统MRAS控制方法的基础上将SM变结构控制与MRAS相结合,提出了一种基于SM-MRAS速度观测器的无速度传感器控制策略。该无速度传感器技术通过SM-MRAS转速观测器,实现对速度准确估计,省去了速度传感器环节。最后在永磁同步电机系统平台对无速度传感器控制策略进行验证,研究结果表明所提出的无速度传感器控制策略的有效性。
1 无速度传感器方法的工作原理
无速度传感器控制策略一般基于矢量控制实现永磁同步电机无速度传感器控制。永磁同步电机矢量控制方法主要有:id=0控制,功率因数cosφ=1控制,最大转矩电流比控制等。这些矢量控制方法中,id=0控制方法简单,计算量小,不存在由于电枢反应对永磁同步电机的去磁问题,被较为广泛使用。因此,本文采用id=0矢量控制方法对永磁同步电机进行控制。
基于id=0矢量控制的无速度传感器控制结构框图如图1所示,主要由六部分组成:1)速度和电流控制器;2)坐标变换模块;3)空间矢量脉宽调制(SVPWM)模块;4)逆变器单元;5)SM-MRAS速度观测器;6)永磁同步电机(PMSM)。
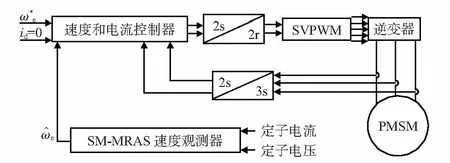
图1 无速度传感器控制框图
控制器的功能是根据反馈的速度和电流信号计算出给定的电压信号;坐标变换模块的功能是利用坐标变换理论实现永磁同步电机数学模型的转换,简化控制过程;SVPWM模块的功能是根据电机运行情况计算出逆变器的开通和关断信号;逆变器单元的功能是根据SVPWM模块提供的开关信号,正确开通和关断逆变器中的绝缘栅双极型晶体管(IGBT),输出电机需要的三相正弦电压。SM-MRAS速度观测器的功能是根据定子电流和定子电压计算出速度信号,反馈给控制器。
2 基于SM-MRAS的无速度传感器方法设计
2.1 基于MRAS的无速度传感器方法
MRAS法是将系统模型作为参考模型,结合辨识速度与系统模型关系构建可调模型,然后将两模型的输出的误差信号经过PI控制器反馈到可调模型中,从可调模型得到辨识的速度信号,基于MRAS的速度观测器结构框图如图2所示。

图2 基于MRAS的速度观测器框图
图2中参考模型为
(1)
式中ψd,ψq为d,q轴的磁链分量;Rs为定子电阻;Ls为定子电感;ωe为转子角速度;ud和uq为d,q轴的电压分量;ψf为永磁体磁链;p为微分符号。
根据式(1)中的磁链方程,可调模型为
(2)

根据Popov稳定性理论,基于磁链可调模型的传统MRAS控制策略得到的转子角速度为
(3)
式中kp和ki为正系数。
2.2 基于SM-MRAS的无速度传感器方法
基于单一MRAS控制方法的速度观测器采用PI控制器调节获得速度,PI参数较难调节,当系统参数发生变化时,定参数的PI控制器难以到达最佳性能。SM变结构控制有很强的鲁棒性,受系统参数变化影响小。本文提出SM-MRAS速度观测器,采用SM变结构控制方法代替PI控制,使速度观测器设计更简单,鲁棒性更强,基于SM-MRAS的速度观测器结构框图如图3所示。
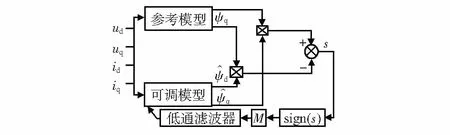
图3 基于SM-MRAS的速度观测器框图
SM变结构控制是通过高频切换控制刻意地改变系统结构,从而将系统状态限制在SM面上。根据这一原则,设计SM面s为
(4)
则滑模面s的导数为
(5)
采用常值切换控制阀,估计速度为
(6)
式中 M为正常数,sign为符号函数。
将式(6)代入到式(5)可得
(7)
当M取足够大值时,一定可以使SM面满足Lyapunov稳定性条件,即满足下式条件

(8)

(9)
从式(9)可以看出,当电机估计磁链与实际磁链相等时,等式第二项和第三项为0,则等效速度收敛到真实速度。根据式(6),估计速度是SM面的离散函数,其低频分量即为真实速度。因此,当高频分量反馈给观测器后,低频分量可以通过低通滤波器获得,即为电机速度。
3 仿真分析
本文利用SIMULINK建立的仿真软件验证方法的有效性。仿真系统中采用额定转速为50 r/min的永磁同步电机,仿真步长为10 μs,逆变器开关频率为5 kHz。
图4给出了额定速度为20 r/min阶跃到40 r/min,逆变器直流侧电压为538 V,系统空载时,采用无速度传感器与采用编码器检测速度的对比实验结果。

图4 速度突变时实验结果
从图4可以看出,在给定速度信号存在阶跃时,采用无速度传感器方法可以实现对速度的准确估计,具有较快的动态响应特性,稳态速度平滑。
图5给出了额定速度为40~-40 r/min,逆变器直流侧电压为538 V,系统空载时,采用无速度传感器与采用编码器检测速度的对比实验结果。
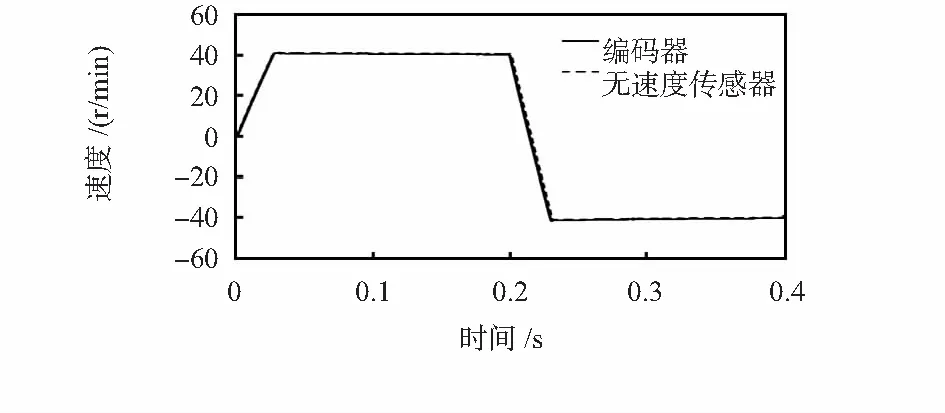
图5 速度反向时实验结果
从图5可以看出,在给定速度信号反向时,采用无速度传感器方法可以实现与编码器几乎相同的跟踪特性,差异较小,对系统速度估计准确。
4 结 论
通过原理分析和实验结果表明:该观测器可以准确估计系统速度,从而省去速度传感器实现无速度传感器控制,同时通过将滑模变结构算法取代传统MRAS方法中的PI环节,使系统无速度传感器控制更加简单,系统鲁棒性更强。
[1] Bolognani S,Calligaro S,Petrella R,et al.Sensorless control of IPM motors in the low-speed range and at standstill by HF injection and DFT processing[J].IEEE Transactions on Industry Applications,2011,47(1):96-104.
[2] 夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):25-34.
[3] Qiao Zhaowei,Shi Tingna,Wang Yindong,et al.New sliding-mode observer for position sensorless control of permanent magnet synchronous motor[J].IEEE Transactions on Industrial Electro-nics,2013,60(2):710-719.
[4] Ji Hoon Jang,Seung Ki Sul,Jung I K Ha,et al.Sensorless drive of surface-mounted motor by high-frequency signal injection based on magnetic saliency[J].IEEE Transactons on Industry Application,2003,39(4):1031-1039.
[5] Bolognani S,Oboe R,Ziglitto M.Sensorless full-digital PMSM drive with EKF estimation of speed and rotor positon[J].IEEE Transactions on Industrial Electronics,1999,46(1):184-191.
[6] Kim Hongryel,Son Jubum,Lee Jangmyung.A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J].IEEE on Industrial Electronics,2011,58(9):4069-4077.
[7] Bolognani S,Oboe R,Ziglitto M.Sensorless full-digital PMSM drive with EKF estimation of speed and rotor positon[J].IEEE Transactions on Industrial Electronics,1999,46(1):184-191.
[8] 李 瀛,胡立坤,梁冰红.采用MRAS 速度观测器的异步电机无电压传感器DTC研究[J].传感器与微系统,2015,34(6):61-63.
Research on speed sensorless of permanent magnet synchronous motor system
ZHANG Zhi-wei, ZHANG Tian-yi
(School of Electrical Engineering and Automation,Tianjin University,Tianjin 300072,China)
In order to improve capacity of resisting disturbance of the permanent magnet synchronous motor system,a speed sensorless method is proposed for speed identification.Sliding mode(SM)variable structure control and the model reference adaptive system(MRAS)method are combined together.Through selecting the motor body as reference model and using the output voltage and current of the inverter,the adjustable model based on flux equation are established.The speed is identified based on the two model error,using SM variable structure method.In the Matlab simulation platform,the speed sensorless method is analyzed.The results show that the proposed sensorless method has better dynamic and static performance and can accurately identify speed.
permanent magnet synchronous motor; sliding mode(SM)variable structure; model reference adaptive system(MRAS); speed sensorless
10.13873/J.1000—9787(2017)02—0032—03
2016—06—21
TP 273
A
1000—9787(2017)02—0032—03
张志伟(1990-),男,硕士研究生,研究方向为电机控制与电力电子技术。
