基于FPGA的PID神经元网络控器的研究及应用
2017-02-17中船重工第七一五研究所任敬伟
中船重工第七一五研究所 任敬伟
基于FPGA的PID神经元网络控器的研究及应用
中船重工第七一五研究所 任敬伟
声纳收放系统工作环境极其恶劣并复杂多变,但工作中对缆阵的收放精度要求非常严格。为提高收放系统工作的稳定性、控高精度以及应对复杂环境的能力,改变传统控制策略引进人工智能是十分必要的。本文在控制器的设计过程中引入PID神经元网络智能控制算法,并对算法MATLAB软件仿真和控制器实验测试,通过实验结果分析证明智能算法的引入对提高控制系统在复杂环境下稳定完成收放控制的能力效果明显。
PID神经元网络;FPGA;智能控制器;收方控制系统
1 引言
现阶段收放系统工作过程中,各个环节均需要人为干预,系统工作性能和工作稳定性在很大程度上取决于操作人员的技术水平以及对系统结构熟悉程度,过多的人为因素将会影响系统在复杂环境中优越性能的充分体现。同时随着科技的发展,尤其是人工智能技术的越趋成熟,有效地引入人工智能进入到复杂的控制系统中,对系统控制性能以及系统通用性的提高都有很大帮助。
根据以上分析以及对工作环境的研究,本文在进行控制器的设计研究过程中有效的将PID神经元网络控制算法引入到以FPGA作为主控芯片的控制器中。
2 PID神经元网络的基本原理
2.1 PID神经元网络
PID神经元网络是将传统PID与神经网络深入融合的一种新型半智能算法。采用的融合方式有效的解决了传统PID控制过程中适应环境能力差的问题,以及神经网络收敛速度慢、容易陷入局部最小等问题。PID神经元网络将神经网络中神经元的状态函数采用比例、积分、微分函数使其具有比例、积分、微分功能,PID神经元网络实现了传统PID与神经网络优缺点互补,优点主要体现以下方面:
1) PID神经元网络仍然含有一般神经网络的特点,因此其仍然具备一般神经网络所具备的逼近任意连续有界的非线性函数的能力;
2) 初始权重值依据PID规律确定,系统在初始状态下就趋近于稳定状态,从而对整体系统的稳定性提供了保障,还加快了收敛速度从而有效的避免了陷入局部极小点;
3) 由于内部神经元具有了比例、积分和微分的特性,使PIDNN控制系统具有了响应速度快、超调小、无静差等优点;
4) PID神经元网络结构简单、神经元数量少,因此其较容易的在硬件中实现,加快了其应用于实践。
2.2 PID神经元网络初始权值确定
PID神经元网络结构分为单输出和多输出型二种,单输出的PID神经元网络是指在网络中只有一个输出神经元,对单一目标进行控制。
充分利用传统PID控制中实时性以及其具有的丰富使用经验和神经网络具有对非线性系统的控制能力,二者互相补充实现真正意义上的PID神经网络。SPIDNN网络与被控对象串联,设定输入值与被控对象的输出值最为SPIDNN的输入值,控制器的输出值作为被控对象的输入值,PIDNN单变量控制系统的结构,如图1所示。

图1 PIDNN单变量控制系统结构
3 PID神经元网络控制器的硬件及软件设计
3.1 控制器的硬件设计
硬件的设计在很大程度上决定着控制器性能,在硬件设计中核心算法芯片的选择更是直接决定着控制器的运算速度和环境适应能力。控制器硬件设计前已经确定控制器将采用的控制算法为PID神经元网络智能算法,为适应这种并行运行的算法选择了基于硬件描述语言的FPGA控制器的核心芯片。
在硬件设计过程中充分考虑到应用环境的恶劣,对于输入输出均进行光电隔离。在接口设计中,有针对性地选择100M以太网接口、CAN总线通信协议和485接口,硬件设计电路图如图2所示。

图2 485通信接口
3.2 控制器的软件设计
PID神经元网络算法是一种半基于被控对象的智能算法,在控制器初始参数计算时不需要精确的数学模型,但也不同于其它智能算法初始参数随即给定。PID神经元网络控制器先通过传统PID计算参数方法确定具有一定参考价值的初始参数,然后通过神经网络的自学习能力,对网络中权值进行优化。
4 控制算法仿真
4.1 固定被控对象的阶跃响应
在MATLAB环境下采用S函数的形式编写PID神经元网络控制器,构建Simulink仿真框图。在仿真框图中,被控对象选用一个能基本代表收放控制系统的简化二阶模型,如图5-4所示。在进行传统PID控制器与SPIDNN控制器仿真时,其二者的参数相同,均为,仿真结果如图3所示。
4.2 被控对象变参数仿真
为检验控制器在复杂环境下应对被控对象受外界环境影响其参数受到影响后,PID神经元网络控制器的控制效果,将被控对象分母调整为后进行阶跃响应,仿真结果如图4所示。

图3 固定对象仿真图
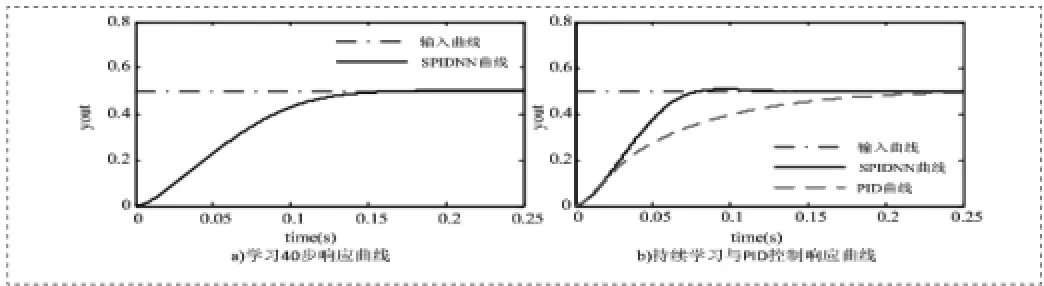
图4 变参数仿真图
5 结论
PID神经元网络控制器采用的控制算法在模拟仿真中与传统PID控制算法对比,可以看出无论在响应速度还是超调上都具有明显优势,应对复杂多变的控制环境更体现出智能控制不依赖于被控对象的优势。综合以上各方面分析,PID神经元网络控制器在算法实现上对提高控制器性能具有很大的优势,同时其简单的结构对其在硬件实现具有极大的可行性。