钻机二层台排送管机械手刚柔耦合动力学仿真分析
2017-02-13胡送桥唐清亮陈明凯祝克强
胡送桥,唐清亮,陈明凯,祝克强
(三一集团有限公司 湖南分公司,长沙 410100)
钻机二层台排送管机械手刚柔耦合动力学仿真分析
胡送桥,唐清亮,陈明凯,祝克强
(三一集团有限公司 湖南分公司,长沙 410100)
运用仿真软件Hypermesh及ADAMS建立钻机二层台排送管机械手刚柔耦合模型,模拟机械手夹持管具从收缩状态到井口中心位置的送管过程。对比分析机械手臂架纯刚体、刚柔耦合两种状态和不同臂架驱动速度下机械手末端抓手各方向的位移和位移偏差。为机械手臂架驱动系统的设计选型、臂架的结构设计等提供理论数据支撑,缩短了产品设计开发周期。
钻机;排送管机械手;刚柔耦合;动力学分析
为了提升钻机的钻井作业工作效率,节约人工成本,提高作业工人的安全性,油田及钻井承包商对钻机二层台排送管机械手的需求日益迫切。国外主流钻机制造商,例如NOV公司等早已推出自动排送管机械手产品并投入应用。国内钻机制造商也先后进行了类似产品的研发,但国内市场尚未有成熟可靠的钻机二层台排送管机械手产品投入使用[1-3]。针对钻井作业的工艺特点和使用要求,设计开发了一套可用于钻井作业的钻机二层台排送管机械手。考虑机械手臂架的柔性特性,通过ADAMS软件建立了刚柔耦合模型,模拟了机械手夹持管具从收缩状态到井口中心位置的送管过程。对比分析了机械手臂架纯刚体、刚柔耦合两种状态和不同臂架驱动速度下机械手末端抓手各方向的位移和位移偏差,为机械手臂架驱动系统的设计选型、臂架的结构设计等提供理论依据[4-5]。
1 机械手主要结构及工作原理
钻机二层台排送管机械手由二层台、猴道和机械手总成等组成,如图1所示,其中机械手总成通过平移小车固定在二层台猴道下方。
机械手总成由抓手、臂架Ⅰ、臂架Ⅱ、臂架Ⅲ、臂架Ⅳ、连接架、连杆、转台及平移小车等组成,如图2所示。工作原理如下:平移小车通过电机驱动实现机械手沿猴道的往复直线运动;平移小车下方安装转台,转台通过电机驱动实现机械手的往复回转运动;臂架Ⅰ、臂架Ⅱ、臂架Ⅲ、臂架Ⅳ、连杆、转台、连接架和抓手组成两套平行四边形结构,臂架Ⅳ通过电机驱动实现旋转运动,实现机械手总成末端抓手的伸展和收缩运动,双平行四边形结构可保证末端抓手在伸展和收缩运动时始终保持水平状态。
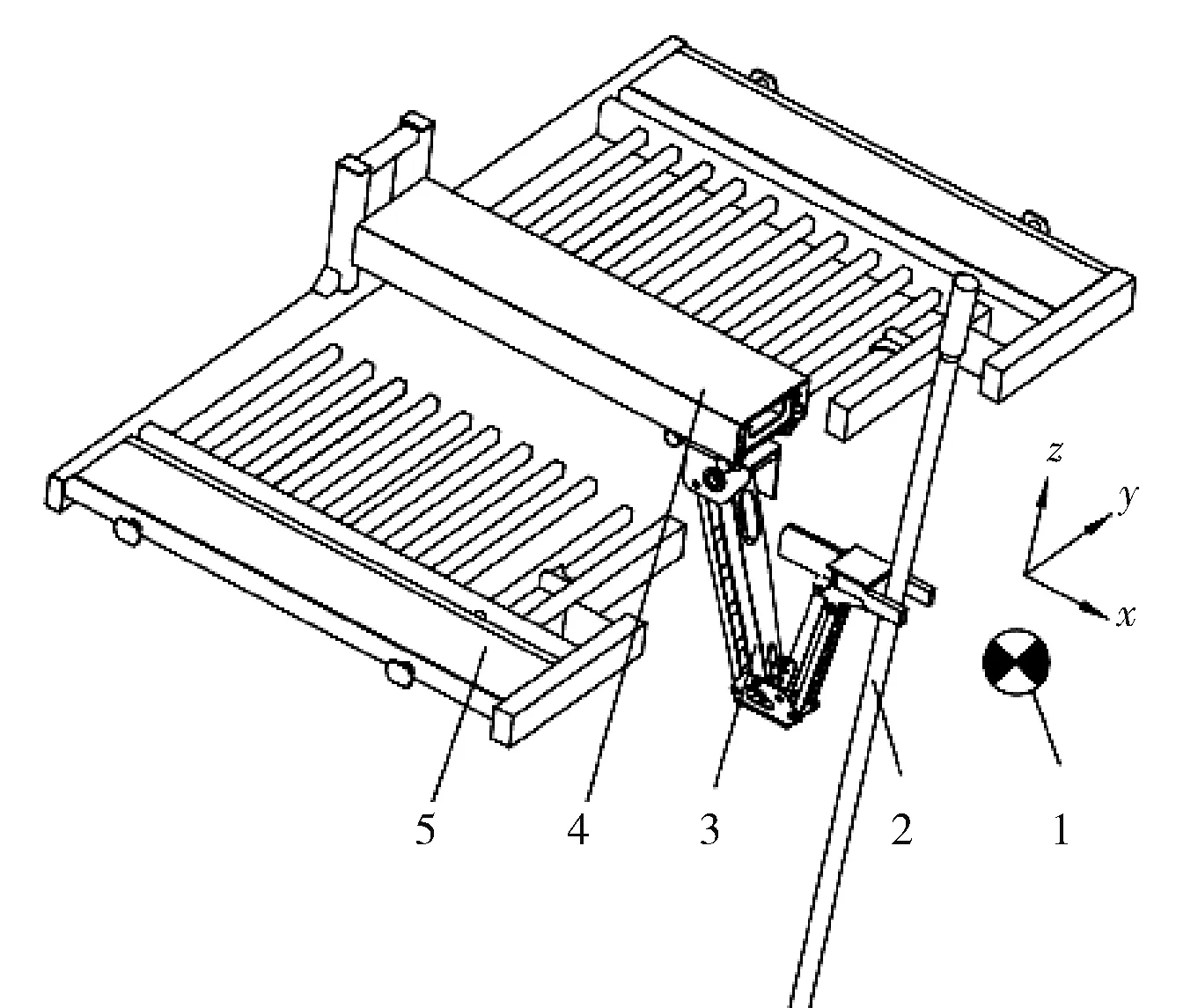
1—井口中心位置;2—管具;3—机械手总成;4—猴道;5—二层台。
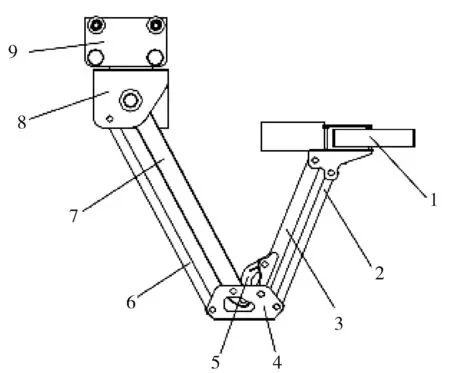
1—抓手;2—臂架Ⅰ;3—臂架Ⅱ;4—连接架;5—连杆;6—臂架Ⅲ;7—臂架Ⅳ;8—转台;9—平移小车。
2 机械手刚柔耦合分析
采用三维建模软件Pro/E对钻机二层台排送管机械手关键零部件进行简化,建立机械手的三维模型,另存为Parasolid(.x_t)格式,导入ADMAS软件中。对机械手的4个臂架进行柔性化处理,臂架柔性化处理的过程如下:将4个臂架分别导入Hypermesh中,抽中面后划分网格,定义材料弹性模量2.1×105MPa,泊松比0.3,密度7.9 t/m3,在臂架的各铰点位置建立关键点,采用PSHELL壳单元划分网格并赋厚度和材料属性,关键点和周边孔面节点之间用刚性区域连接[6],此外,建立包括CMSMETH、ASET的载荷集和包括Global_case_contral、Output、Dti_units、Gpstress的控制卡片,利用Hypermesh与ADAMS的接口导出柔性体的模态中性文件(MNF文件),导出MNF文件前要注意单位的换算[7-8];将MNF文件导入ADAMS中替代之前的纯刚体臂架,并通过查看导入的柔性体质量信息、模态固有频率和振型核对MNF文件[9-10],完成后的刚柔耦合模型如图3所示。
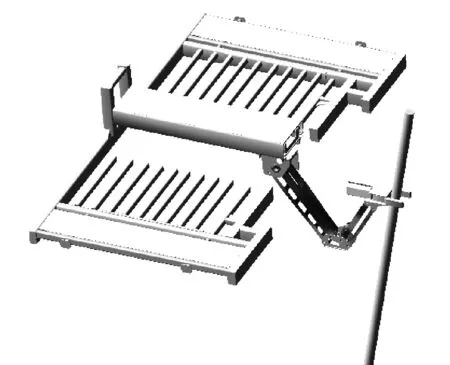
图3 钻机二层台排送管机械手刚柔耦合模型
在纯刚体和刚柔耦合模型中,各自定义各铰点铰接关系和臂架驱动电机,通过ADAMS模拟机械手送管时机械手夹持管具从收缩状态到井口中心位置这一运动过程,具体参数设置如下:臂架驱动电机采用STEP函数驱动,分别模拟电机驱动在6、8 和10 (°)/s 3种速度状态,机械手臂架最大伸展角度为40°,仿真结束后提取机械手末端抓手前后(沿x轴)、左右(沿y轴)和垂直(沿z轴)方向的位移和位移偏差曲线。以下篇幅中纯刚体状态简称刚体状态,刚柔耦合状态简称柔体状态。
函数定义为STEP(time,0.1,0d,0.6,8d)+STEP(time,4.5,0d,5,-8d)时,模拟电机驱动为8 (°)/s的速度状态,提取机械手末端抓手各方向位移和位移偏差曲线,如图4~9。
根据上述曲线分析可知,柔体状态下机械手末端抓手存在振动现象,同实际情况相符,振动幅度在前后方向上相对刚体状态最大偏差为13 mm,左右方向上相对刚体状态最大偏差为7 mm,垂直方向上相对刚体状态最大偏差4.7 mm,且各方向位移偏差随臂架向井口方向伸展时有逐步增大的趋势。

图4 机械手末端抓手前后方向位移对比
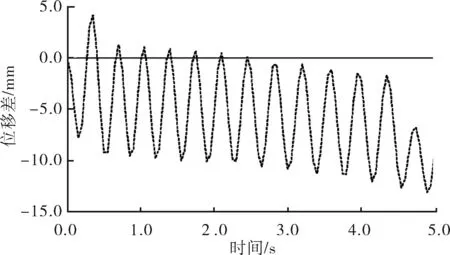
图5 机械手末端抓手前后方向位移偏差

图6 机械手末端抓手左右方向位移对比
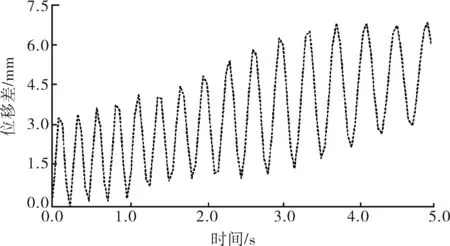
图7 机械手末端抓手左右方向位移偏差

图8 机械手末端抓手垂直方向位移对比
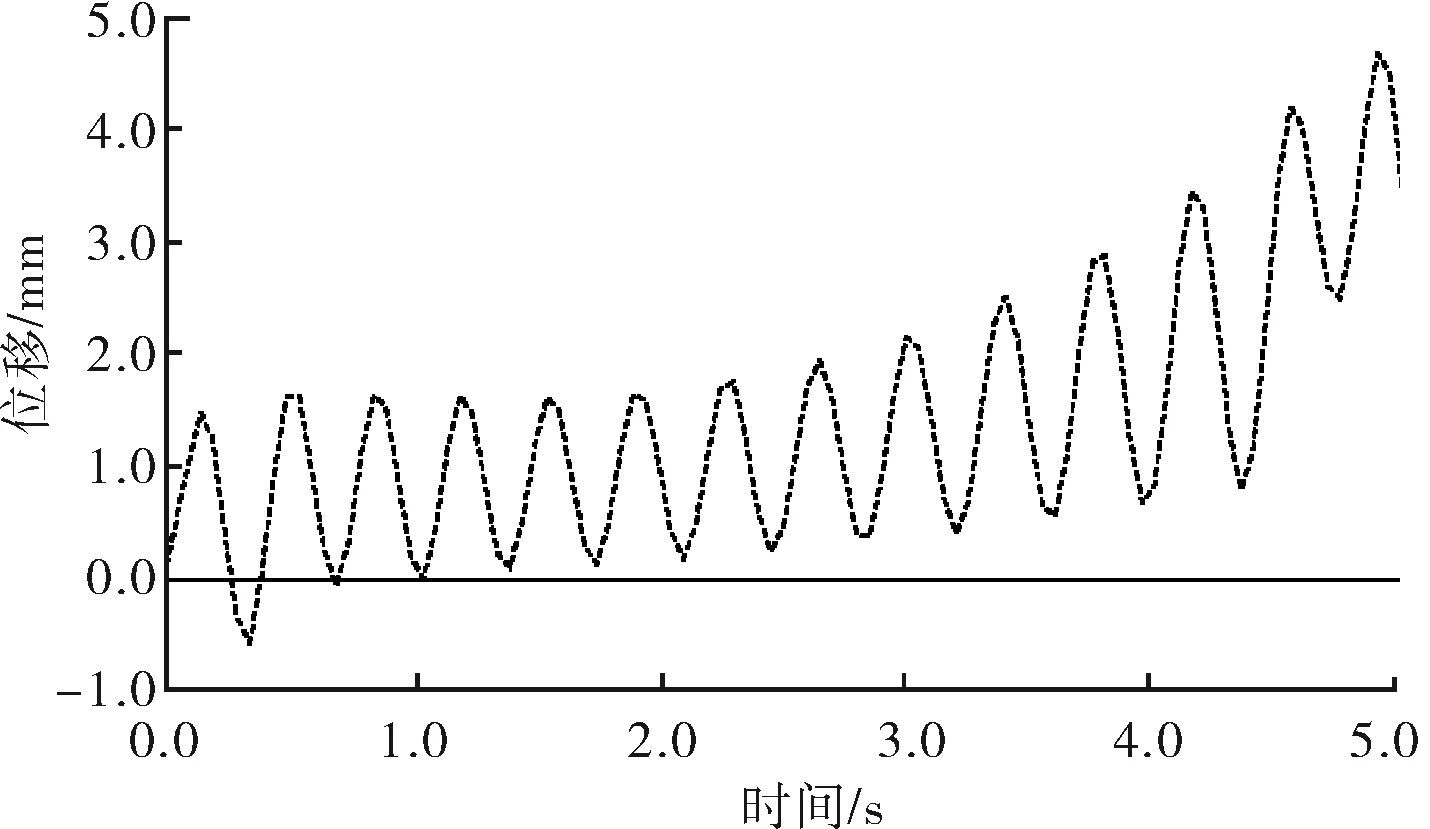
图9 机械手末端抓手垂直方向位移偏差
限于篇幅长度限制,函数定义为STEP(time,0.1,0d,0.6,6d)+STEP(time,6.2,0d,6.7,-6d)和STEP(time,0.1,0d,0.6,10d)+STEP(time,3.5,0d,4,-10d)时,模拟电机驱动为6 (°)/s和10 (°)/s 2种速度状态,提取的机械手末端抓手各方向的位移和位移偏差曲线不单独列出,2种速度状态下的位移曲线与上述曲线趋势基本一致,各方向位移偏差与上述位移偏差对比如表1所示。
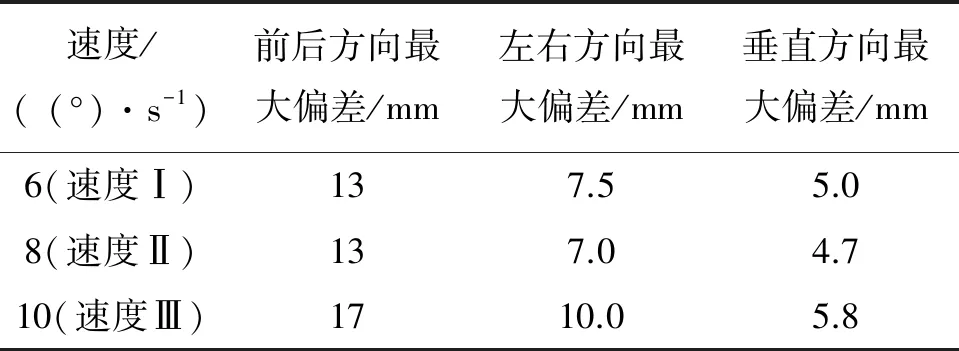
表1 3种速度状态下各方向位移偏差对比
由表1可知,不同电机驱动速度对机械手末端抓手的前后、左右和垂直方向位移偏差有较大影响:因机械手臂架结构本身刚度的不足,上述3种速度状态下机械手末端抓手各方向均存在位移偏差,但在速度Ⅰ、速度Ⅱ状态下其偏差变化不大;当增大至速度Ⅲ状态时,机械手末端抓手的各方向位移偏差有明显增大趋势。因此,设计时除考虑臂架本身结构刚度对末端抓手位移偏差的影响外,还应综合考虑臂架驱动速度对位移偏差的影响,避免机械手末端抓手出现较大的振动,从而影响机械手末端抓手的定位精度。
3 结论
1) 运用Hypermesh和ADAMS软件建立了钻机二层台排送管机械手的刚柔耦合模型,并仿真模拟了机械手夹持管具从收缩状态到井口中心位置的送管过程。
2) 对比了机械手臂架纯刚体、刚柔耦合2种状态下机械手末端抓手各方向的位移及位移偏差数据,结果表明臂架柔性体结构更加符合机械手的实际工况,其末端抓手存在明显振动。
3) 对比了3种速度状态下机械手末端抓手的位移偏差数据,结果表明末端抓手各方向位移偏差受到臂架本身结构刚度和驱动速度的综合影响。
[1] 童征,郑立臣,牛海峰,等.陆地钻机用二层台管具排放系统设计[J].石油机械,2011,39(8):27-29.
[2] 何鸿.钻井平台钻杆自动化排放系统方案设计[J].石油矿场机械,2012,41(9):82-84.
[3] 张洪生,杨帆,姚璐璐,等.陆地钻机桅杆式钻杆自动排放系统研究[J].机械制造,2012(2):43-44.
[4] 熊楚良,黄松和,朱鹏飞.码垛机器人刚柔耦合动力学仿真分析[J].包装工程,2015,10(19):84-88.
[5] 王江勇,王基生,张俊俊,等.单自由度柔性机械臂刚柔耦合动力学仿真研究[J].机械设计与制造,2012(12):54-56.
[6] 李楚琳,张胜兰,冯樱,等.HyperWorks分析应用实例[M].北京:机械工业出版社,2008.
[7] 马鲁凯.考虑车架柔性的载货车操稳性和平顺性研究[D].长沙:湖南大学,2013:12-13.
[8] 王鑫.车架柔性对重型载货汽车操纵稳定性、平顺性影响的仿真分析[D].长春:吉林大学,2012:15-26.
[9] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2016.
[10] 赵武云,刘艳妍,吴建民,等.ADAMS基础与应用实例教程[M].北京:清华大学出版社,2012.
Rigid-flexible Coupling Dynamics Simulation Analysis of Drill Rig Monkey-Board Pipe-handling Manipulator
HU Songqiao,TANG Qingliang,CHEN Mingkai,ZHU Keqiang
(SanyHeavyIndustryCo.,Ltd.,Changsha410100,China)
In order to achieve unmanned pipe-handling of monkey-board,drill rig monkey-board pipe-handling manipulator aims to replace derrickmen that handle pipes high-effectively.In this paper,the simulation analysis software Hypermesh and Adams were used to establish the model of rigid-flexible coupling dynamics simulation analysis and simulate the process of pipe-handling,and analyzed the displacement and the deviation in three directions under the states of rigid & rigid-flexible coupling and three driving velocity of manipulator arm,which provided reliable data to support structure improvement and driving system design and shorten the design cycle.
drilling rig;pipe-handling manipulator;rigid-flexible coupling;dynamics analysis
1001-3482(2017)01-0034-04
2016-08-19
胡送桥(1984-),男,湖南娄底人,硕士研究生,主要研究方向为石油钻修井井口自动化机械,Email:husq898@163.com。
TE928
A
10.3969/j.issn.1001-3482.2017.01.008