万吨重载列车在神朔段长大下坡道循环制动优化
2017-02-06董克毓魏伟
董克毓,魏伟
(大连交通大学 交通运输工程学院,辽宁 大连 116028)*
万吨重载列车在神朔段长大下坡道循环制动优化
董克毓,魏伟
(大连交通大学 交通运输工程学院,辽宁 大连 116028)*
对万吨重载列车在神朔段长大下坡道的实际操作情况进行分析,利用纵向动力学仿真系统对司机的操作进行了优化处理.分析结果表明,通过改变列车开始制动时的速度、机车制动电流以及空气制动时间,可以减少重载列车在长大下坡道行驶时的循环制动次数.
万吨重载列车;长大下坡道;循环制动次数
0 引言
随着铁路技术的不断进步,列车的货运运输正向着高速、重载方向发展.但是伴随着重载列车的开行,列车牵引总重的不断增加,纵向冲动也越来越大,过大的纵向冲动会引起车钩断裂、列车脱轨、零部件磨损严重等一系列问题,尤其是重载列车在长大下坡道工况下行驶时,列车所需的行驶操纵能力问题尤为关键.
如何让重载列车安全平稳的通过长大下坡道越来越引起人们的重视.重载列车在长大下坡道上以较高速度运行时,单用动力制动往往不足以控制列车速度.为了不超过规定速度,需要用循环制动进行调速,即制动、缓解、再制动、再缓解……,直至驶出长大下坡道[1].其中,循环制动的周期受到最高限制速度和最低缓解速度这两种因素的限制.而循环制动开始缓解时,速度会逐渐增大,当速度增到一定程度时就要进行制动,从上一次的缓解到下一次的制动所经历的时间,还要满足副风缸的充风需求,即再充气的时间,这样在下次的循环制动时能有良好的制动效果[2- 4].司机在驾驶列车时,往往希望尽量使用动力制动来控制列车的运行速度,当动力制动无法满足制动要求时,就要采取空气制动,如何在保证副风缸充气效果良好的情况下,司机能用简单的操作让列车以较快的速度安全平稳通过长大下坡道,成为本文研究的内容.
本文通过对神华铁路万吨重载列车采集的实验数据进行研究,并结合大连交通大学开发的空气制动与纵向动力学联合仿真系统[5- 6],优化重载列车在神朔段长大下坡道的操纵方案.
1 神朔段长大下坡道循环制动的操纵方式
试验采用2*HXD1+58*C80+HXD1+58*C80无列尾装置的 1万吨级重载列车,即机辆总数为119辆,测试选取的断面分别为04车位、28车位、40车位、58车位、62车位、72车位、84车位、96车位和116车位.图1表示的是每个测试断面空气制动系统的列车管开始减压时刻的曲线图.从图1可以看出,从首车列车管开始减压到尾车列车管开始减压共耗时约6 s,而且第58车位和第62车位的列车管开始减压时间明显要比第40车位的提前且和第28车位的时间基本一致,但是要比第04车位的列车管开始减压时间滞后,这是因为在第58车位和第62车位之间有一辆从控机车,在开始进行空气制动时该机车也同时在排气,但是该中间机车相比较头两辆机车有滞后时间,通过采集的实验数据,中间的补货机车相比较本货机车有1.9 s的滞后时间,这就是为什么会有中间的第58车位和第62车位的列车管开始减压时间要比第40车位的列车管开始减压时间提前,但是要比第04车位列车管开始减压时间滞后.由此可见,该编组方式能够加快中后部列车的列车管排气速度,有效的提升了列车空气制动的同步性.

图1 列车管开始减压时间对比
图2为神朔段(57~93 km)长大下坡道6次循环制动的首车和尾车副风缸压力曲线.每次制动前,首车和尾车的副风缸压力均为600 kPa左右,循环制动过程中,首车和尾车的副风缸压力降低均为55 kPa左右,而且,6次循环制动中从开始缓解到尾车副风缸充满(认为副风缸压力到580 kPa)用时分别约为76、71、69、74、70、68 s.

图2 循环制动首、尾车副风缸压力曲线

图3 列车在神朔段长大下坡道的操纵方法及效果
为了清楚地表达试验数据中6次循环制动的操纵方法和效果,把列车行驶速度、路段限速、首车列车管压力变化曲线以及机车的制动电流绘制在一图中,如图3所示.从图3可以看出,列车通过该路段时最高速度为75 km/h,最低速度为20 km/h,通过该路段的平均速度为54.75 km/h.
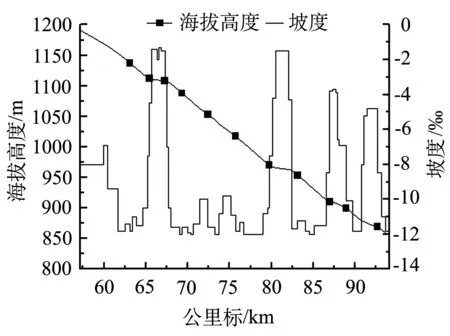
图4 神朔段长大下坡道的海拔高度及其坡度
结合图4来看,发现操纵方法上有不足之处.如图3所示,该长大下坡道57.13~94.118 km中除了77.919~80.959 km最低限速为60 km/h以及93.189~93.317 km最低限速为75 km/h之外,其余路段限速均为81 km/h.列车进入长大下坡道的起始速度为57 km/h,当列车的本货机车位于57.5 km时开始采取第一次循环制动,而此时的列车运行速度为59 km/h,且机车的制动电流为50 A,通过图4可以发现该长大下坡道的平均坡度为-9‰,第一次循环制动所处位置的坡度为-8‰,低于平均坡度,发现列车开始第一次循环制动时的运行速度偏低.当第一次循环制动进入缓解阶段时,列车的运行速度下降到47 km/h,机车的制动电流增加到120 A,到61.103 km位置时制动电流增加到160 A,然后到61.274 km时制动电流立刻降到0 A,从图3可以发现这一过程中列车的速度上升的比较缓慢.从62.042 km到第二次循环制动电流由0 A增加到60 A,发现机车的制动电流减到0 A到第二次开始循环制动,列车的速度上升明显加快,不足之处在缓解阶段如果减小机车的制动电流甚至不施加制动电流,列车的速度增加的比较快.第二次循环制动时列车的速度为68 km/h,速度达到73 km/h时才开始降速,比较此处的限速81 km/h还有一定的提升空间.当第二次开始缓解机车制动电流维持在180 A时,出现了一段匀速期,结合图4来看该匀速期列车正好处在坡度较小的路段,当列车驶过该小坡道路段时机车的制动电流减到0 A,这时发现列车的速度同第一次缓解之后制动电流减小时的速度变化出现了相同的不足之处,即均明显增加,而且第三次开始循环制动时的速度也同样有提升的空间.第三次缓解时列车位于71.126 km,机车的制动电流为280 A,从图3可以看出速度增加的比较缓慢,原因在于受到前文提到的两处特殊路段的限速所限制,直到76.483 km列车开始第四次循环制动,速度由第三次缓解时的60 km/h增加到69 km/h,不足之处在于速度上升的比较慢,完全可以加快速率,在列车到达到76.483 km之前就开始第四次循环制动.而且第四次循环制动是速度降到37 km/h时才开始缓解,制动过程中机车的制动电流为130 A.结合图4,为了能够让列车在驶入80~82 km这段坡度较小的路段时开始缓解,而不是如图3中让速度快速下降,没到小坡道路段时就开始缓解,要对机车的制动电流进行适当的调整.列车进行第四次缓解之后,制动电流由310 A持续一段时间之后迅速减小到0 A,再次出现了速度上升比较快的不足现象.图3中第五次开始循环制动时速度为70 km/h,直到75 km/h时才开始降速,速度降到65 km/h开始缓解,结合图4,86~87 km出现小坡道,图3中该路段缓解时制动电流又比较大,最大达到400 A,所以速度在一直的减小,直到90.657 km速度减小到53 km/h时才开始上升,这时的制动电流已经减小到200 A,当速度升到55 km/h时开始第六次循环制动.针对最后两次循环制动,完全可以改变第五次循环制动的制动时间以及对机车的制动电流做出适当的调整,再结合图4所示的小坡道,可以省去第六次循环制动.针对以上所述的不足之处,设计出以下操纵方案进行优化处理.
2 长大下坡道列车操纵方法的优化处理
2.1 仿真系统的验证
因为此段坡道较长,仅取该长大下坡道57.13~70.021 km的数据进行仿真处理.根据试验数据的实际操作,运用到仿真处理中,得到如图5 所示的试验与仿真的速度对比.如图5所示,在57.5 km处,列车开始空气制动,试验和仿真几乎是在57.65 km处速度达到60 km/h时开始降速,在58.517 km开始缓解,试验和仿真数据几乎是在58.6 km处速度达到45 km/h时开始升速,当列车行驶到62.195 km时,开始第二次空气制动,试验数据大约在62.6 km处速度达到73 km/h时开始降速,仿真大约是在62.5 km处速度达到70 km/h时开始降速度,列车在64.644 km位置开始缓解,试验与仿真数据几乎是在65.4 km处速度达到54 km/h时开始升速,当列车到达68.836 km时,开始第三次空气制动,试验与仿真数据几乎是在69.3 km处速度达到72 km/h时开始降速.通过以上对比可以看出,试验与仿真的速度曲线趋势基本一致,所以可以基于此大连交通大学开发的空气制动系统与纵向动力学系统联合仿真系统进行仿真优化.

图5 试验与仿真速度对比
2.2 优化处理改进操纵方法
如前文所述,列车在进入长大下坡道时共进行了6次循环制动,从图3中可以看出每次开始制动时的速度分别为为59、70、68、68、70、55 km/h,制动后速度分别增加到61、73、73、69、75、57 km/h才开始降速.刚开始循环制动时之所以没有立即减速是因为列车开始实施空气制动时,列车管降压,副风缸向制动缸充气推动活塞,这时列车并不会减速,当活塞推动勾贝使得闸瓦与轮缘触碰时才会施加制动,而这一过程也需要时间,此时速度才会逐渐减小.从图3可以发现,6次循环制动循环制动时均是在限速为81 km/h条件下进行的,所以第一个对列车行驶进行操作改进就是提高列车开始制动时的速度,由于列车速度不能在开始空气制动时立即减速,考虑到限速问题,将列车开始制动时的速度在试验基础上提高到73 km/h.第二点操纵方法的改进就是机车的制动电流.除了在驶入77.919~80.959 km这一路段之前的最后一次缓解时要适当的减小机车的制动电流之外,其他几次空气制动开始缓解时均要增加制动电流,保证列车速度能够比较缓慢的增加,可以延长列车由缓解速度增加到下次开始制动时的速度所用的时间.但是不能盲目的增大制动电流,因为列车在进行动力制动的时候,仅施加给机车,而后面的车辆在没有空气制动的时候会沿着坡道自由下滑,这会使这列车向前涌从而使列车前端出现较大的压钩力,不利于列车安全行驶.本文研究的试验列车所采用的是HXD1机车,调速手柄给定动力制动时待调速手柄离“0”位后稍作停留,再逐渐增加制动力,动力制动力的调节控制要均匀不可过猛,防止突升突降造成列车冲动,机车滑行擦伤轮对[7].而驶入77.919~80.959 km这一路段之前的最后一次缓解时要减小机车的制动电流是为了列车能够从缓解速度在短时间内上升到73 km/h并开始制动,同时还要有足够的制动距离保证列车驶入77.919~80.959 km这一路段时不超速.第三点改进之处是在列车驶入77.919~80.959 km这一路段之前进行空气制动时,通过调整机车的制动电流,在不超速的情况下,保证列

(a)制动次数对比

(b)速度对比
车能驶入80~82 km这段坡度较小的路段时开始缓解.第四点改进之处就是延长列车在80.959 km之后的空气制动时间,适当的增加机车的制动电流,争取一次空气制动就能通过该长大下坡道剩下的路段.对试验中的操作不足及改进的优化处理产生的具体效果如图6所示.通过增加机车缓解时的制动电流,列车由试验中的6次循环制动减小到4次.并且结合图6(b)来分析,速度较原来有一定程度的提升,仿真数据的最小速度为43.82 km/h,最高速度为77.61 km/h,平均速度63.13 km/h.
3 结论
通过对长大下坡道列车操纵方法的优化处理,达到了如下的目的:
(1)试验数据测得的列车通过神朔段长大下坡道的平均速度为54.75 km/h,而优化处理之后的平均速度为63.13 km/h,比试验数据提高了15.3%,而且优化处理的最高速度为77.61 km/h,没有超过该长大下坡道的限速要求,安全运行的同时减少了时间成本;
(2)通过适当的调节机车的制动电流以及适当的增加空气制动时间,减少了列车通过该长大下坡道的制动次数,由原来的6次循环制动减少到4次,为司机的操纵带来了方便.
[1]安中正.“和谐号”机车牵引2万吨重载列车的制动操纵技术探讨[J].机车电传动,2010(1):70- 72.
[2]付昌友,丁学锋.山西中南部铁路壶关至红旗渠段长大坡道缓坡设置研究[J].铁道标准设计,2015(1):11- 16.
[3]耿志修.大秦铁路重载运输技术[M].北京:中国铁道出版社,2009.
[4]耿志修,李学峰,张波.大秦线重载列车运行仿真计算研究[J].中国铁道科学,2008(2):88- 93.
[5]魏伟,赵连刚.两万吨列车纵向动力学性能预测[J].大连交通大学学报,2009,30(2):39- 43.
[6]魏伟.两万吨组合列车制动特性[J].交通运输工程学报,2007(6):12- 16.
[7]嬴勇,芦拥军.和谐系列电力机车操纵办法[M].北京:中国铁道出版社,2015.
Optimizing of Cycle Braking of 1 000t Train on Long Heavy Down Grade of Shenshuo
DONG Keyu,WEI Wei
(School of Traffic and Transportation Engineering,Dalian Jiaotong University,Dalian 116028,China)
The actual situation of operation of 1 000t train on the long heavy grade of Shenshuo is analyzed,and the operation of the driver is optimized by using the longitudinal dynamics simulation system.The analysis shows that the number of cycle braking is reduced by changing the speed of braking,the current of braking and the time of air braking.
1 000t train;long heavy down grade;the number of cycle braking
2016- 01- 21
董克毓(1990-),男,硕士研究生;魏伟(1963-),男,教授,博士,主要从事系统动力学的研究
E-mail:dongkeyu@163.com.
A