基于势函数场模型的密集人群结队疏散方法
2017-01-20菅肖霞张小宁
菅肖霞,张小宁
(同济大学经济与管理学院,上海200092)
基于势函数场模型的密集人群结队疏散方法
菅肖霞,张小宁*
(同济大学经济与管理学院,上海200092)
为再现坡度设施中密集人群的挤压倒地现象,建立一种势函数场元胞自动机模型.该模型采用耦合行人之间挤压作用力场的坡度人行设施势函数场作为人群行走方向的“导航图”.利用模型分析斜坡角度、人群密度与行人挤压倒地现象之间的作用机制,提出两两结队行走策略可以减少倒地人数.模拟结果表明采用两两结队行走策略时倒地人数不超过总人数的10%.
势函数场;元胞自动机;挤压;倒地;两人结伴行走;坡度
1 引 言
近年来,我国举办文体娱乐活动的规模和数量不断地增加,组织者对于活动场所的容量、结构及其周围的交通条件均有不同程度的需求,因此,改建旧式娱乐活动场所,同时新建大规模的现代化设施成为一种发展趋势.然而,在改建和新建过程中难免出现新旧设施出入口过渡区域不在同一水平面上的情形,需采用坡度出入口设施进行衔接.从而引发出此类设施中的安全行走问题,尤其在下坡出入口处,坡度越陡,行人的稳定性越差,随着人群密度的增加,行人之间的推挤作用增强,与水平设施相比,密集人群在该类设施中更加容易被推倒.
解决上述问题的关键是模拟行人推挤作用过程及挤压倒地现象,分析行人个体之间的非线性作用对集群现象的影响,最终提出科学有效的坡度人行设施安全疏散方法,即在人群推挤作用力达到行人个体可承受的最大推力之前,实时对行人行走策略进行指导,避免个别行人倒地而引发一系列踩踏事故.
目前,用于模拟行人运动的模型主要包括:社会力模型、连续流体力学模型以及元胞自动机模型.社会力模型[1]是将行人视为有限大小的二维粒子,将行人对周围环境的反应以及行人与行人之间的各种内在动机类比为各种作用力,行人在力的作用下运动,且遵循牛顿第二定律.该模型可以模拟行人流的出口处呈“拱形”拥堵现象、通道中相向行人流的成行现象、瓶颈口处相向行人流的振荡现象、交叉行人流的成带现象以及“时走时停”现象等不同的行人流自组织现象[2,3].此类模型的优势在于充分考虑行人个体之间的作用力,缺点是由此而造成的模型计算复杂度高.行人流连续流体力学模型[4-6]将行人群体假设为均匀连续流体介质,每个行人类比为具有相同特性的流体质点,采用可压缩流体力学方程组,描述行人流的速度、密度、流量这类宏观物理量之间的关系.该模型不能直接描述行人个体之间的微观相互作用.行人流元胞自动机模型[7,8]是在具有离散且有限状态的元胞空间和离散时间段上,按照一定的局部规则更新整个区域中的元胞状态,模拟人群运动变化过程的动力学系统.此类模型中发展较为显著的是Burstedde等[8]提出的地场元胞自动机模型,模型将地场作为行人运动的虚拟“导航图”,行人的行走规则依据静态地场耦合动态地场来确定,其中静态地场表征行人出发地与目的地距离,动态地场表征行人之间的相互作用.此类模型计算复杂度低,可以直接描述行人个体之间的微观作用力,再现拥堵现象、瓶颈效应、出口处成拱现象、从众效应以及自组织成行现象等典型的行人流特征,是后续发展行人流模型的基础之一.
在地场元胞自动机模型的基础上,大量的研究工作集中于从行人行走路径选择角度改进地场计算方法[9-11];从复杂场景中行人运动行为角度扩展地场模型,模拟具有不同转角长廊中的疏散[12,13],多出口疏散[14]以及地铁站内交织行人流的发展过程[15];研究行人流在具有坡度出入口设施中的挤压作用[16];考虑偏向行走[17,18]、行人可视度的变化对行人运动过程的影响[12,19];行人结伴行为对于行人流疏散时间的影响[20,21]等.另外,还有结合连续流体力学模型、社会力模型和元胞自动机模型优势而发展的混合模型.宋卫国等[22]以社会力模型为参考,在元胞自动机模型中考虑行人之间的挤压、排斥作用力.Zhang等[23]结合行人流连续模型中的行人选择沿所需行走费用减少最快的方向行走的策略,提出势函数场元胞自动机模型.
综上所述,研究具有斜坡出入口人行设施中的行人流问题以及相关管理措施的工作较缺乏.另外,行人结队行走方式较为普遍,是行人自发增加抗压能力的可行性措施,但是目前已有的研究工作[20,21,24]将其作为影响人群流量的行人特征,未考虑到结队行走方式在抵抗推挤作用中的有效性.本文将研究具有坡度人行设施中,过度拥堵人群挤压倒地现象的成因,以及探究通过何种结队行走的方式自发增加抗压能力,避免群体性挤压倒地踩踏事故的发生.
在正常情况下,行人都具有一定的认知能力,在密集区域时,行人之间的空余空间较少、身体接触较多,行人不能按照其自身的意愿移动到渴望的位置,行走舒适度降低.行人认为只要将其前方行人推走,其本身即可尽快到达目的地,从而远离不舒适的拥挤区域.因此,每个行人产生推力,推力由一个行人传递给另一个行人,随着时间的增加,前面的行人承受其后方人群的聚集推力.行人在聚集力作用下,拥挤程度增加,形成密集度越大推挤力越大的恶性循环;聚集拥堵现象长时间得不到解决,体弱者将窒息倒地,必然引起人群恐慌,最终造成严重的踩踏事故.针对这类安全隐患,在前期工作[16]的基础上,通过量化行人之间的推压作用力,简化模型规则,建立耦合坡度影响的费用势函数场元胞自动机模型,模拟高密度行人流的过度拥挤、倒地现象,探究行人之间的微观作用机理.
考虑到行人在高密度拥挤的情况下,从众心理更加明显,组织管理者稳定的情绪、镇静的行为可以有效对抗人群的不安和恐慌.本文充分利用人群与组织管理者博弈过程中的从众心理作为安全管理设计的前提,提出实时指导行人采用两人结队行走的方式自行减除倒地现象的发生.将两人结队行走措施量化为参数形式,引入建立的模型,定量地研究两人结队行走措施的有效性.
2 耦合挤压作用力场的势函数场元胞自动机模型
本文研究在具有坡度人行设施中行人流的安全疏散问题.考虑到正常情况下行人具有一定的认知能力,本文采用连续模型中行人移动方向选择的最优路径策略,即行人沿时间花费最少的路径到达目的地,也就是沿时间费用势函数的负梯度方向移动.选用这一最优路径选择策略,可以减少行人在选择目标位置时的盲目性和随机性,提高元胞自动机模型在模拟正常情况下的可行性,同时提高模型的计算效率.加之,行人之间的推挤作用是形成行人挤压踩踏现象的重要原因,因此,本文也结合社会力模型中描述行人与外界环境、行人个体之间的相互作用方式,量化行人个体之间的挤压作用力,建立耦合挤压作用力场的势函数场元胞自动机模型.本节主要阐述挤压作用力场耦合受坡度影响的费用势函数场元胞自动机模型的构造过程,其中包括具有坡度影响的费用势函数场、行人之间相互挤压作用力场以及模型的更新规则和安全行走方法的构造.
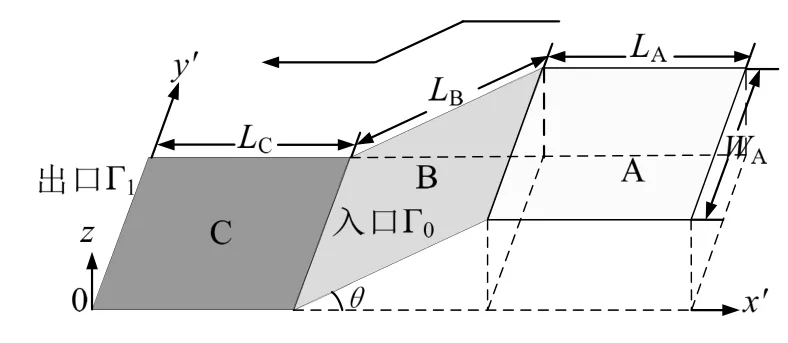
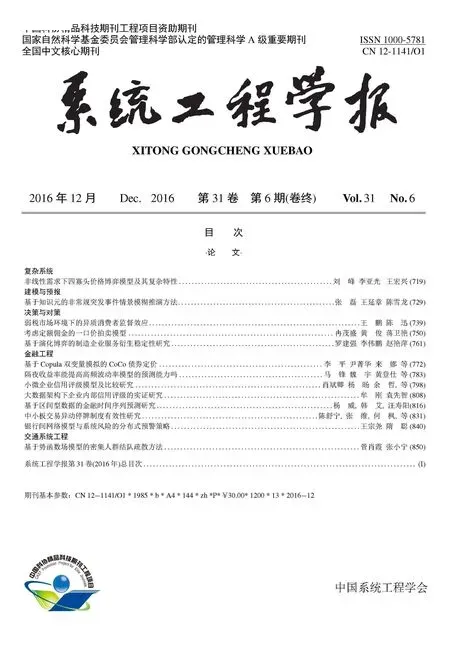
图1 有坡度行人设施示意图Fig.1 Illustration of the walking domain with a ramp
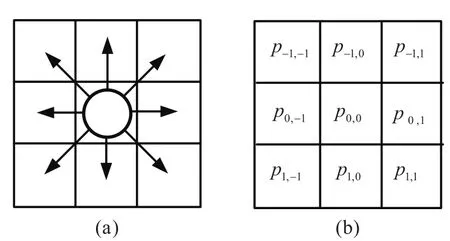
图2 (a)一个被占据的元胞(0,0)及其8个邻居;(b)相应的移动概率Fig.2 (a)An occupied cell(0;0)and its eight neighboring cells;and(b)the corresponding probabilities
2.1 具有坡度影响的势函数场
模型中的势函数场是行人运动的“导航图”,行人沿费用势减小的方向移动,由于行人移动区域并非平面区域,为了计算该区域上的势函数场值,在时刻t,首先,将区域拉伸为平面区域Ω,Ω的出口同为Γ1,平面区域Ω与三维区域的子区域C重叠.均匀划分区域Ω,保持平面区域Ω与三维区域的元胞大小和个数均一致.在Ω上,计算势函数场φ(x,y,t),其中(x,y)表示元胞位置;其次,引入坡度系数ω(x,y,θ)对φ(x,y,t)进行重构,得到含坡度区域上的势函数场(x,y,t,θ).具体求解步骤如下.
1)求解平面区域Ω上的势函数
假设τ(x,y,t)≥0为费用分布函数,即单位距离上的时间费用,在固定时刻t,平面行走区域Ω中任意位置(x,y)的势函数φ(x,y,t)是关于费用分布函数τ(x,y,t)的泛函,行人从(x,y)到某个目的地位置(x0,y0)∈Γ1的总费用为

在式(1)中,将(x,y)到(x0,y0)的积分路径表示为单位向量(x′(s),y′(s))指向积分方向.为了便于说明,不妨将位置(x0,y0)完全等同于集合Γ1.
根据场论中积分与原函数之间的关系,要保证势函数φ(x,y,t)为单值函数,只需假设式(1)的积分与路径无关,即要求φ(x,y,t)满足条件

由此可得Eikonal方程

而且,方程(1)的可积性暗含φ(x0,y0,t)=0,(x0,y0)∈Γ1,是方程(3)的边界条件.因此,当假设φ(x,y,t)≥0时,Eikonal方程边值问题的解存在唯一,详细证明可参考文献[23].
以上理论推导表明,在固定时刻t,任何位置(x,y)处行人在无推挤作用力的情况下,渴望的移动方向为此外,费用分布函数τ(x,y,t)满足[5,23,27]τ(0)=1,τ′(ρ)>0,0≤ρ≤1,ρ=ρ(x,y,t)为密度分布函数,这里采用以(x,y)为中心,包含至少25个元胞的子区域上的平均密度作为(x,y)处的密度.方程(3)在满足边界条件φ(x0,y0,t)=0, (x0,y0)∈Γ1下的解可采用快速步进法[28]求得.
采用φ(x,y,t)乘以坡度系数ω(x,y,θ),重构有坡度区域上的势函数(x,y,t,θ),即

其中

由ω(x,y,θ)的表达式(5)可知,利用ω(x,y,θ)≥1将平面上的势函数φ(x,y,t)放大为三维区域上的势函数(x,y,t,θ),其充分反映坡度对于势函数值的强烈影响作用;ω(x,y,θ)定义为坡度角θ∈[0°,90°)的增函数,表明坡度角越大,受坡度影响的区域A和区域B上的势函数值变化越大;注意到,当取定坡度角θ时,ω(x,y,θ)在子区域A和区域C上的值不同,事实上,尽管子区域A和区域C都是平面区域,但是它们位于不同的水平面上,坡度系数取值不同表示两个子区域有高度差,区域A受到坡度的影响,其ω(x,y,θ)值大于1,相反地,区域C位于最低的水平面上,其ω(x,y,θ)为常数1,不受坡度角的影响.此外,(x,y,t,θ)和φ(x,y,t)具有相容性,即当θ=0°时,(x,y,t,θ)=φ(x,y,t).
2.2 挤压作用力场
当行人处于密集人群时,每个行人被周围行人包围.在这种情况下,行人渴望尽快到达目的地,因此,行人有意识的推挤其前方行人,从而造成挤压作用力的聚集增加.本小节通过引入聚集推力场模拟密集人群中行人之间挤压力的作用效果.
在时刻t,当位置(x,y)处行人的无量纲密度为ρ(x,y,t)=1时,(x,y)处行人的周围没有空位置, (x,y)处行人所产生推力的大小为

这里的推力大小f(x,y,t)并非真实行人推力的大小值,只反映推力的作用效果,表明行人所在位置的费用势对行人所产生推力的影响程度.由式(6)可知,f(x,y,t)是势场值(x,y,t,θ)的减函数,可以验证这是合理的假设,事实上,当行人走到目的地附近时,其所在位置处的费用值远比区域中的最大费用值小,此时,行人具有更强的动力去推挤其前方的行人;相反地,当行人当前的位置与目标位置相差很远时,行人清楚地知道其周围行人的分布状况,推挤其他行人对于其尽快到达目的地的作用效果较小,因此,其产生的推力较小.由于行人产生推力是为了使其自身尽快到达目的地,推力的方向为沿费用势(x,y,t,θ)减少最快的方向,即l(x,y,t)=(l1,l2)=-(x,y)/‖∇‖,由此可得,在时刻t,(x,y)处行人所产生的推力为f(x,y,t)=f(x,y,t)l(x,y,t).
Fruin[29]的研究表明,行人产生的推力,由于行人之间的身体接触,被不断地由一个行人传递给另一个行人,本文将采用叠加每个时间步每个行人承受推力的方式模拟推力的传递和聚集过程.采用fadd(x,y,t)表示时刻t,在位置(x,y)处增加的推力,当(x,y)被行人占据,且其为另一个行人的渴望位置时,(x,y)处行人承受的推力fadd不为零,具体地来说,若(x,y)的某个邻居位置(,)被行人占据,且此行人的渴望移动方向为l(,,t)=(x-,y-),(,)处行人产生的推力为f(,,t),此时推力f(,,t)被施加于(x,y)处行人身上,因此增加推力fadd(x,y,t)的大小为f(,,t),方向沿l(,,t);否则,fadd=0.
因此,时刻t,元胞(x,y)处行人承受的聚集推力为t-1时刻的聚集推力与增加的推力fadd(x,y,t)的向量和.聚集推力向量场F(x,y,t)定义为

式(7)中第一个等号右端第一项表明随着时间的不断增加,推力的聚集过程;第二项表明每个时间步推力从一个行人到另一个行人身上的传递过程.式中F1(x,y,t)和F2(x,y,t)分别为F(x,y,t)沿x和y方向的分量,为了便于表述,采用‖F(x,y,t)‖=((F1(x,y,t))2+(F2(x,y,t))2)1/2表示F(x,y,t)的大小.
在密集型人群中,行人在力的作用下被推动前进,当行人累积承受的推力‖F(x,y,t)‖超过其可以忍受的最大力度(临界值)时,行人可能会被推倒而受伤,此时受伤的行人将无法继续移动.记F*(x,y,t)表示临界值,注意到每个行人可承受的最大力度不同,若行人自身产生的推力大,则相应地其可承受的力度也会变大,因此假设F*(x,y,t)是每个行人可产生推力大小f(x,y,t)的增函数;另外,坡度角的大小也会影响行人可承受的力度,显然地,当行人占据的位置越陡峭,行人越容易被推倒,可承受力度的临界值越小.综上,临界值F*(x,y,t)为

其中

从β的定义可知,β是坡度角θ的减函数,若θ=0°,β取到最大值,这表明在平坦的行走区域中,行人不容易被推倒,而随着θ增大,β减小,行人容易被推倒.显然地,该临界值的定义不是唯一的,可以针对不同的场景,而采用不同的形式来深入研究人群动态.
为了避免行人承受的推力超过其临界值时,行人被推倒,本文采用在单个行人承受的推力将达到其临界值之前,指导其与同排的左或右单个行人采取手挽手的方式增加自身承受力.考虑到并排多人成组对于行人疏散流量的影响较大,本文只考虑两人成组的情形.具体来说,分组时(x,y)处行人需要满足的条件和措施为:(a)时刻t,(x,y)处行人不属于任何小组;(b)(x,y)处行人承受的推挤力满足γF*(x,y,t)<‖F(x,y,t)‖<F*(x,y,t),其中结队参数γ∈(0,1)确保在行人被推倒之前采用安全结队行走措施;(c)(x,y)处行人可以与同排左右邻居中一个没有结伴的行人(,)手挽手,若两个邻居都为单个行人,则等概率选择其中之一;(d)(x,y)与其结伴的行人(,)形成两人小组,行走过程中视为一个整体; (e)当单个行人左右邻居都有各自小组,若(x,y)处行人左或右边邻接墙壁,该处行人可以采用扶墙的方式,否则,此行人将继续独自行走.
2.3 模型更新规则
从以上两节的讨论可知,在方程(3)中,引入预先设定的费用分布函数τ(x,y,t),利用数值方法求得方程(3)的数值解,并将解代入式(4),得到费用势场(x,y,t,θ);而采用式(7)可以计算得到聚集力场F(x,y,t).下面将利用这两个场确定模型规则:一方面利用势函数场值,结合比较聚集推力‖F(x,y,t)‖和临界值F*(x,y,t)的大小,确定行人可移动方向上的概率或行人被推倒受伤的概率,从而确定行人位置的更新规则;另一方面考虑到需要增加行人的抗挤压能力避免倒地事故发生,将每两个行人采用手挽手的措施量化为模型规则,从而定量地得出行人安全行走的位置更新规则.
本文在有无安全措施的两种情况下,均采用随机串行更新规则,即在每个时间步将所有行人随机排序.采用此类随机串行序列更新规则的优点是既从统计角度保证每个行人具有同等的优先权,又不必解决并行更新规则中行人位置冲突问题,又不影响模型再现行人运动规律.每个时间步将所有行人随机排序后,利用势函数场和聚集力场依次计算行人移动概率,确定行人移动方向,再利用移动后行人的新位置分布,更新势函数场和挤压作用力场,直至可移动行人离开行走区域或达到总计算时间.令(0,0)表示未受伤单个行人所占的元胞,从时刻t到t+1,行人位置更新规则、安全行走更新规则以及相应情形下聚集力传递过程的数学表述如下.
2.3.1 无安全措施情况下,行人的位置更新规则
1)行人位置随机排序:在时刻t,将所有行人位置随机排序的算法过程为
(a)记t时刻未受伤行人总数为Nt,显然,
(b)行人在t时刻的位置是确定的,所有人的位置集合记为
(c)将标号序列{1,2,....,Nt},随机重新排序后,得到行人的更新顺序.

其中(i,j)∈S0,0={(i,j)|(i,j)为空,且|i-0|≤1,|j-0|≤1,(i,j)/=(0,0)},δi,j(0)≡((i,j)-(0,0))/di,j表示差商,di,j表示元胞(i,j)与(0,0)之间的距离;集合Sm的定义为Sm={(i,j)|δi,j(0)=,且表示集合Sm的元素个数.

其中rinjured是一个概率数,等概率取值0或1.此值可视为外界对于行人倒地的干扰因素,即当行人承受的挤压作用力超过其可承受的临界值时,行人可能倒地也可能不倒地.倒地时,位置(0,0)处行人以概率受伤倒在位置(i,j),若(i,j)/=(0,0),该行人倒在一个空位置上,此位置位于此行人受到的聚集推力的方向上;否则,该行人将倒在原位置.
2.3.2 考虑安全措施情况下,行人的位置更新规则
1)行人位置随机排序:在时刻t,将每个两人小组作为一个整体,对所有单独行人和两人小组随机排序,算法的实现过程与2.3.1节中的1)同理.
2)行人两两结队规则
(a)本文行人总体的行走趋势为向左,行人面向左,(0,0)同排邻居行人的位置为(1,0)和(-1,0),参照图2(b)所示的位置标记,记与(0,0)处行人结伴行人的位置记为,其定义为


(b)支撑力大小更新为

(c)重新计算临界值,即


(i,j)∈表示小组的差商;集合的定义为表示集合的元素个数.

倒地行人被作为固定障碍物排除在移动系统之外,其受到的推力归0;若小组成员之一倒地,另一行人将单独行走,承受力恢复为其单独时的承受力.
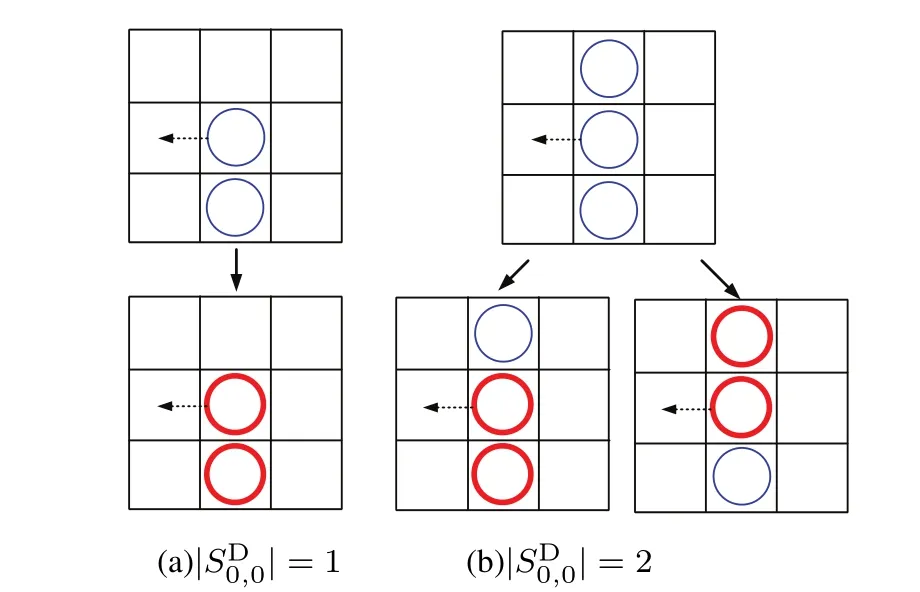
图3 采用安全措施规则2.3.2的两两行人结队方式示意图Fig.3 Diagrammatic sketch of two-people-together strategy using rules 2.3.2
2.3.3 挤压作用力场的传递规则
当t=0时,(0,0)处行人承受聚集力的初始值为0,即从时刻t到t+1,按照规则2.3.1或2.3.2,每个行人得到了更新位置,而且此位置唯一,不妨设(0,0)处行人的最终更新位置为(i*,j*),该行人在时刻t+1,或移动到此位置,或倒在此位置,此时,(0,0)处行人承受的聚集力也将跟随行人移动到新位置(i*,j*)处,聚集挤压力的传递过程为

以上为本文模型的更新规则和算法步骤,其计算与模拟过程均采用MATLAB语言编程实现.
3 倒地现象模拟
本节将采用规则2.3.1模拟再现无安全措施情况下,人群在具有坡度设施中的挤压倒地现象.模型参数设置如下:行走区域的尺寸为LA=20,LB=5,LC=4,WA=WB=WC=6;费用分布函数取为[16,23]

其中g0=0.075,ξ=2.考虑到受伤倒地行人无法移动且阻碍未受伤行人前进,以下每次模拟运算的结束条件为人行设施中无可前进行人,且总时间不超过100个时间步.另外,理论上斜坡角度θ的取值范围是[0°,90°),但实际中常见的坡度设施的角度最大约为35°,因此,模拟中采用的最大坡度角均为35°.为了减少模型中概率数对于模拟结果的影响,模拟数据均采取10次模拟结果的平均值.
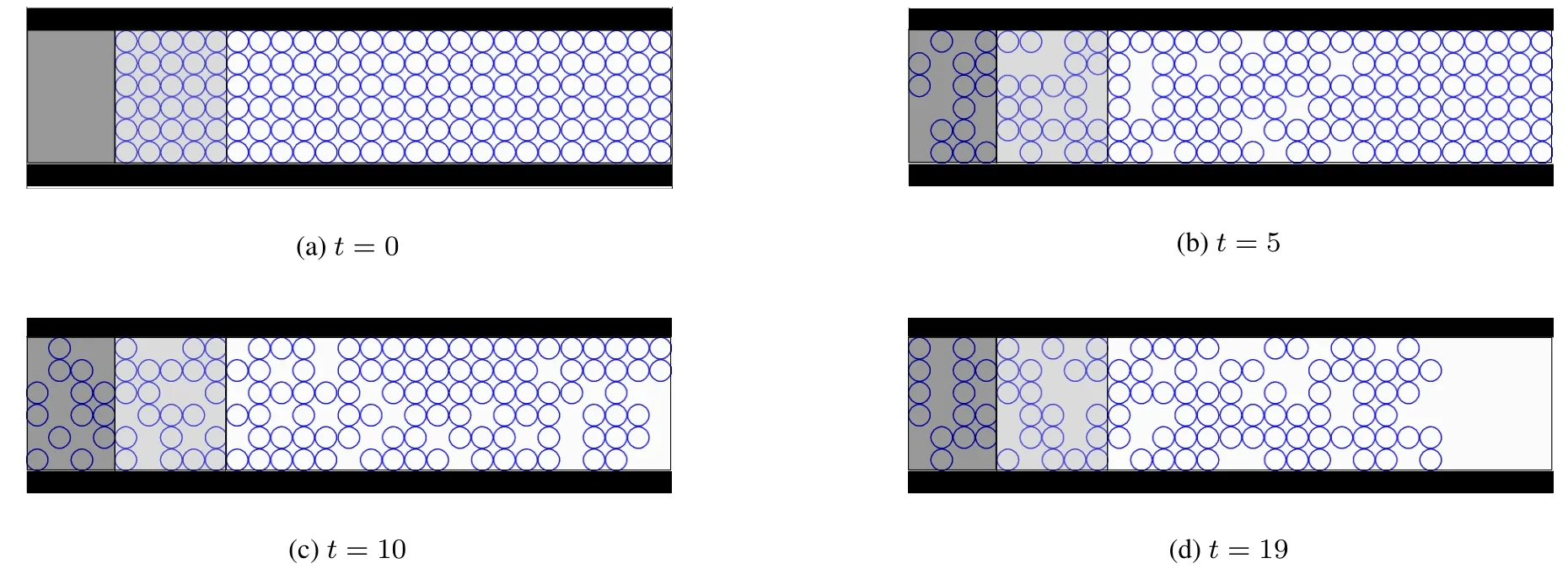
图4 采用无安全措施规则2.3.1的模型模拟得到的行人疏散过程截图(ρ0=1,θ=10°)Fig.4 Evacuation process simulated by the proposed model using rules 2.3.1 without the safe strategy(ρ0=1,θ=10°)
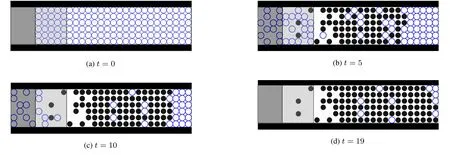
图5 采用无安全措施规则2.3.1的模型模拟得到的行人疏散过程截图(ρ0=1,θ=35°)Fig.5 Evacuation process simulated by the proposed model using rules 2.3.1 without the safe strategy(ρ0=1,θ=35°)
无安全措施情形下,具有坡度人行设施中行人疏散过程的截图(拉伸在二维平面上)如图4及图5所示,其中每4个子图分别为时刻(a)t=0;(b)t=5;(c)t=10;(d)t=19相应的截图.图4与图5中的坡度角分别为θ=10°和θ=35°,初始行人密度均为ρ0=1,即实际密度为6.25ped/m2,区域A和区域B中此时共有150人.图4(a)~4(d)表明在坡度较小时,行人可以保持安全行走无倒地现象发生;而图5(a)~5(d)再现人群在坡度较大设施中的挤压倒地现象.高密集人群聚集于具有较大坡度设施中,行人渴望尽快到达目的地,在无法顺利前进的情况下,行人之间的推挤作用增强;且受坡度影响,行人的稳定性减弱,当前方行人无法承受巨大的推挤作用力倒地时,人群中出现“多米诺”效应,后方行人瞬间失去支撑,而相继倒地,最终导致大量行人倒地.另外,从图5(d)展示的模拟结果可知,在t=19之后,人群分布将保持在t=19时的状态,大部分行人被推倒,人群后方的几个行人尽管未受伤,但是其周围均被受伤行人占据,也将无法移动,疏散过程被迫中断.
本节直观地再现出密集型人群在不同的坡度条件下的疏散过程,以及不同程度的倒地现象,展现了密集型人群处于坡度人行设施中的安全隐患.接下来,引入两两行人成结队的方式,作为减少倒地现象的安全措施.通过模拟数据得到倒地人数与坡度角大小、初始行人密度之间的函数关系,最终分析得出安全措施实施的最佳时机.
4 两人结队行走策略模拟
本节提出采用两人结队行走策略,作为引导行人安全疏散、减少倒地现象发生的方法.为了验证此方法的有效性和可行性,下面将在模型中采用规则2.3.2,模拟两人结队行走策略的实施过程和最佳实施条件.为了便于比较,模型参数选用第3节中的设置,相应于规则2.3.1和2.3.2,将无安全措施的模型记为模型(I),考虑结队行走措施的模型记为模型(II).
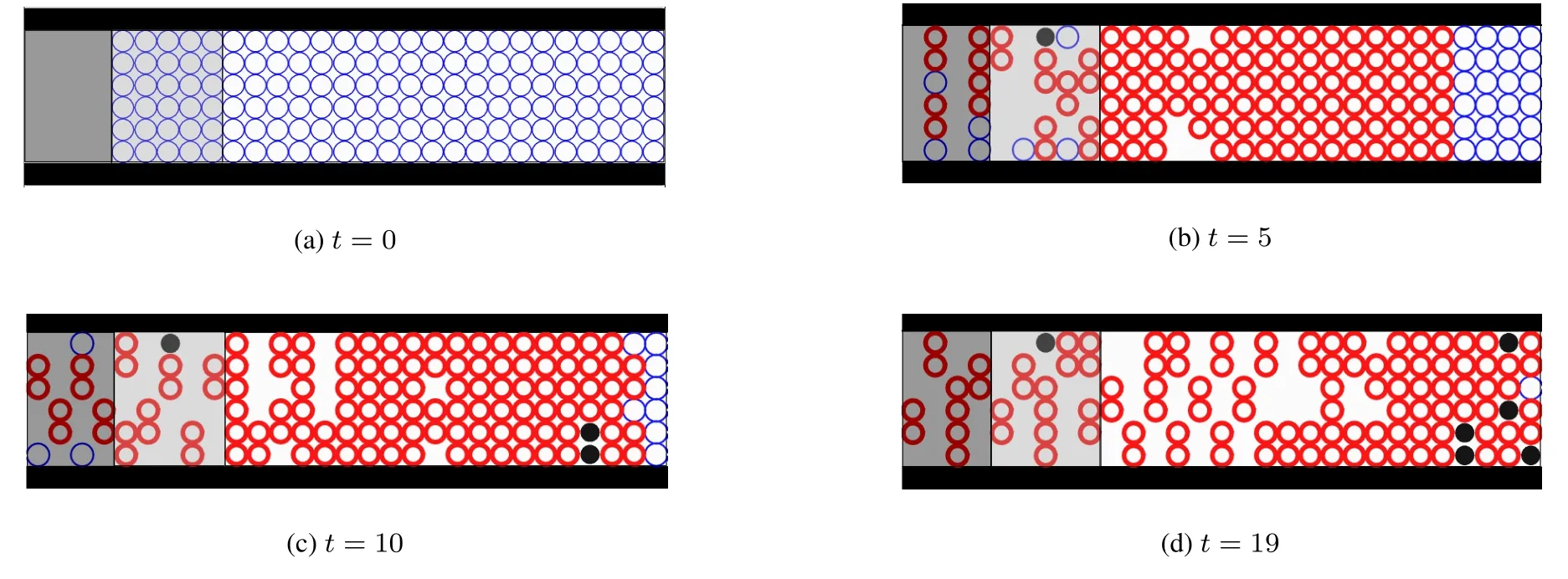
图6 采用有安全措施规则2.3.2的模型模拟得到的行人疏散过程截图(ρ0=1,θ=35°)Fig.6 Evacuation process simulated by the proposed model with safe rules 2.3.2(ρ0=1,θ=35°)
首先,直观地验证两人结队措施的可行性.采用模型(II),模拟得到的疏散过程截图如图6所示(拉伸在二维平面上).图6所示结果均在ρ0=1,θ=35°,γ=0.8的条件下完成.此次模拟结果表明:人群在坡度角较大的设施中,当行人之间的推挤作用力达到单独行人产生推力的80%(γ=0.8)时,行人便开始自行寻找邻居行人结队,增加自身抵抗挤压作用力的强度,从而达到减少倒地危险的目的.比较模型(I)的模拟结果图5与模型(II)的模拟结果图6,在相同设施、相同初始密度条件下,图6的结果表明本文所提的两人结队措施可以减少行人挤压倒地现象的发生几率,与规则2.3.2的理论分析相吻合.
其次,研究安全措施实施的最佳条件,并通过比较有无安全措施的模拟结果,定量地验证两两结队措施的可行性和有效性.为了找出高密度人群在不同的坡度设施条件下,行人承受的推力达到何值时采取结队措施更为有效.下面研究在ρ0=1的情形下,坡θ,结队参数γ以及倒地人数之间的变化关系,如图7所示.该图表明:当θ≤10°时,若γ≤0.5,尽管坡度角比较小,但是行人承受的挤压力还没有达到其倒地临界值的一半,行人之间过早的采取两两结队的措施,在这种情况下,每个小组行人作为一个整体前进,在密集型人群中,同时找到空目标位置的概率要比单个行人前进所需空目标位置的概率要小,导致行人流量减少,造成人群拥堵,从而增加了行人之间的挤压作用,进一步引发少数行人不能忍受挤压作用而倒地的现象;相反地,若取γ>0.5,确保行人在无危险时,可独自承受推挤作用,并正常前进,行人倒地现象发生的几率将降低,此时的数据结果与图4所示的图像结果一致,即在坡度较小的情况下,行人正常行走不会发生倒地现象.当θ>10°时,随着坡度的增加,行人自身稳定性减弱,承受压力的能力减弱,易被推倒.此时若尽早的采取两两结队的安全措施可以有效地制止倒地现象的发生,此情况下取γ≤0.5,倒地人数明显要少;相反地,若取γ>0.5,表明没有及时采取安全措施,倒地人数要比前者多.
从宏观上观察图7的发展趋势,随着斜坡角度θ增大,以及结队参数γ增大,倒地人数增多,换句话说,斜坡越陡,越早的采取结队措施,可以有效减少倒地人数;斜坡越平坦,尽量使行人保持独立行走,保证系统行人流量,可以减少密集人群疏散中的安全隐患.此外,图7进一步表明,只要在行人承受的推挤作用力达到其自身的承受力之前采取两两结队的安全措施,即可制止人群倒地现象中的“多米诺”效应,大幅度地减少行人倒地人数,即倒地人数小于15人,占系统总人数的10%以下,这与图5(d)所示的倒地人数有明显的差距.
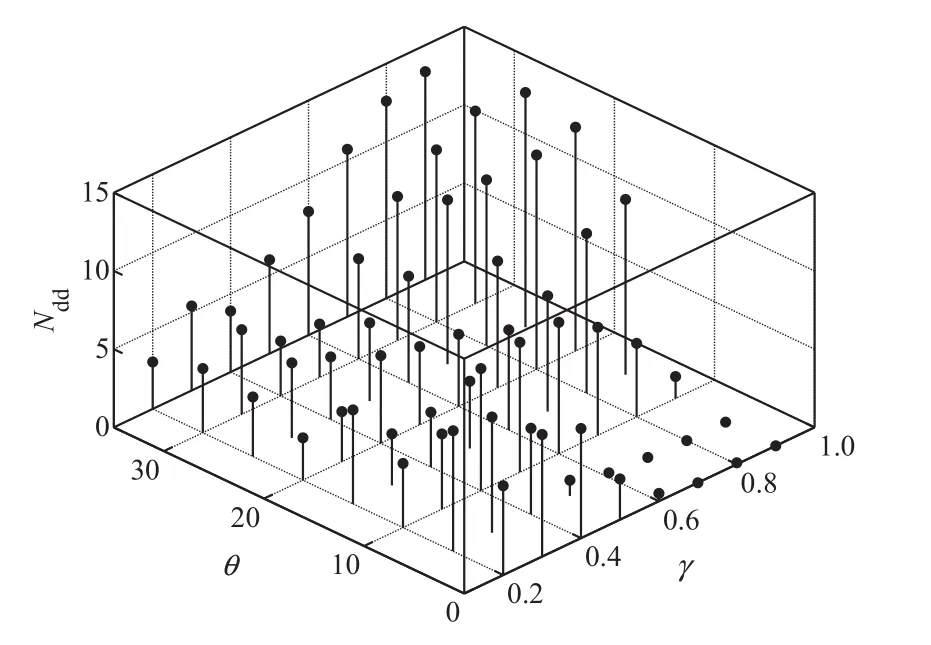
图7 倒地人数(Ndd),斜坡角度(θ),结队参数(γ)之间的关系.ρ0=1Fig.7 The relationship among the number of injured pedestrians(Ndd),the ramp angles(θ)and the parameters of using small groups(γ).ρ0=1
下面定量地分析产生倒地人数差距的原因.模拟中,分别采用模型(I)和模型(II),计算不同初始密度条件下,倒地人数随坡度角变化而变化的函数关系,结果如图8所示.
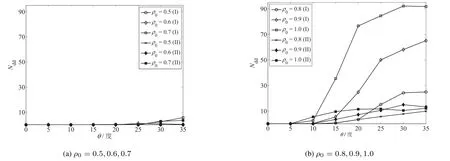
图8 倒地人数(Ndd)与斜坡角度(θ)之间的关系Fig.8 The relationship between the number of injured pedestrians(Ndd)and the ramp angles(θ)
图8(a)和图8(b)分别表示初始密度介于0.5~ 0.7之间和0.8~ 1之间的倒地人数与坡度角之间的变化关系.这里模型(II)中结队参数取为γ=0.8.图8(a)表明初始密度ρ0≤0.7时,即总人数小于0.7(LA+LB)WA=105人,若θ≤20°,两种模型的倒地人数为0;若θ≥25°,初始密度ρ0≤0.6时,倒地人数亦接近于0,ρ0=0.7时,出现少数人倒地现象;而且随着坡度增加,倒地人数也有一定增加,但是不超过10人,小于此时系统最大人数的10%.两模型的变化趋势接近一致,随着初始密度增大,坡度增大,行人倒地现象出现.相对图8(a)而言,图8(b)表明在初始密度ρ0≥0.8时,两个模型变化趋势较明显:每条曲线表明,初始密度固定的条件下,倒地人数是坡度的增函数;当坡度取定,高密度曲线位于低密度曲线上方,暗含倒地人数是初始密度的增函数.另外,取定同一初始密度,将模型(I)和模型(II)相应的曲线作比较,取定ρ0=0.8,当θ≤20°时,模型(I)和模型(II)的倒地人数均小于5,两模型的曲线重合,而θ>20°时,模型(I)的倒地人数接近于(II)的2倍;当ρ=0.9,θ≥15°,或ρ=1,θ≥10°时,受到“多米诺”效应的影响,无安全措施的模型(I)再现的倒地人数急剧增加,最高可达系统人数的约90/150=60%,而采取两两结队安全措施的模型(II)模拟得到的倒地人数始终保持在系统人数的10%以下.
总之,此节模拟结果合理地验证了两两结队方式在减少倒地现象以及制止人群推挤中的“多米诺”效应的可行性和有效性,为进一步将两两结队方式应用于指导实际人群安全疏散奠定理论基础.
5 结束语
本文建立了一种势函数场元胞自动机模型,同时考虑行人之间相互挤压作用力场与受行人设施坡度影响的势函数场.利用所提模型模拟人群在进入具有坡度人行设施时的挤压倒地现象,分析斜坡角度、人群初始密度与行人挤压倒地现象之间的作用机制;并在模拟现象基础上,将行人两两结伴行走的机制引入模型,作为减少行人倒地现象发生的安全疏散策略,并通过模拟验证该疏散策略的可行性和有效性,定量地分析不同初始密度或不同坡度条件下,安全措施实行的最佳条件.
尽管本文研究的场景为三维空间上的坡度人行设施,但是将行人垂直投影在每个子区域上,在每个子区域上可将行人运动视为二维问题,忽略了行人的立体结构,但并不影响模型描述行人运动现象.为了可以更加直观模拟实际行人运动,将来的研究工作一方面将直接考虑三维空间中行人的运动特征,并展示三维空间中的行人运动过程,达到所见即所得的模拟效果,而不做行人投影和行走区域拉伸等空间降维处理;另一方面扩展所提模型的可模拟范围,如将模拟应用于模拟同时具有坡度和转角的复杂人行设施中的人群疏散过程,考虑行人可视度受到外界照明条件影响下的人群疏散过程,分析不同场景中疏散问题的安全隐患,并提出可行的安全疏散方法,最终在大量理论研究基础之上,将安全疏散方法应用于解决实际问题.
[1]Helbing D,Molnˊar P.Social force model for pedestrian dynamics.Physical Review E,1995,51(5):4282–4286.
[2]Helbing D,Buzna L,Johansson A,et al.Self-organized pedestrian crowd dynamics:Experiments,simulations,and design solutions. Transportation Science,2005,39(1):1–24.
[3]陈 锋,翟庆生,王子甲.社会力行人仿真模型的分子动力学方法实现.系统工程理论与实践,2014,34(4):1003–1010. Chen F,Zhai Q S,Wang Z J.Implementation of social force pedestrian simulation model by molecular dynamic method.Systems Engineering:Theory&Practice,2014,34(4):1003–1010.(in Chinese)
[4]Hughes R L.A continuum theory for the fow of pedestrians.Transportation Research:Part B,2002,36(6):507–535.
[5]Huang L,Wong S C,Zhang M P,et al.Revisiting Hughes’dynamic continuum model for pedestrian fow and the development of an effcient solution algorithm.Transportation Research:Part B,2009,43(1):127–141.
[6]Xiong T,Zhang P,Wong S C,et al.A macroscopic approach to the lane formation phenomenon in pedestrian counterfow.Chinese Physics Letters,2011,28(10):1–4.
[7]Blue V J,Embrechts M J,Adler J L.Cellular automata modeling of pedestrian movements//Proceeding of IEEE Conference on Systems,Man,and Cybernetics.Orlando:IEEE Press,1997,3:2320–2323.
[8]Burstedde C,Klauck K,Schadschneider A,et al.Simulation of pedestrian dynamics using a two-dimensional cellular automaton. Physica A,2001,295(3/4):507–525.
[9]Kretz T.Pedestrian traffc:On the quickest path.Journal of Statistical Mechanics:Theory and Experiment,2009(3):1–26.
[10]Kirik E,Yurgel’yan T,Krouglov D.Artifcial intelligence of virtual people in CA FF pedestrian dynamics model//Wyrzykowski R, Dongarra J,Karczewski K,et al.Lecture Notes in Computer Science.Berlin Heidelberg:Springer-Verlag,2010,513–520.
[11]Huang H J,Guo R Y.Static foor feld and exit choice for pedestrian evacuation in rooms with internal obstacles and multiple exits. Physical Review E,2008,78(2):1–6.
[12]Guo R Y,Tang T Q.A simulation model for pedestrian fow through walkways with corners.Simulation Modelling Practice and Theory,2012,21(1):103–113.
[13]JianXX,WongSC,ZhangP,etal.Perceivedcostpotentialfeldcellularautomatamodelwithanaggregatedforcefeldforpedestrian dynamics.Transportation Research:Part C,2014,42:200–210.
[14]赵宜宾,黄 猛,张鹤翔.基于元胞自动机的多出口人员疏散模型的研究.系统工程学报,2012,27(4):439–445. Zhao Y B,Huang M,Zhang H X.On multi-exit occupant evacuation model based on cellular automaton.Journal of Systems Engineering,2012,27(4):439–445.(in Chinese)
[15]陈 然,李 翔,董力耘.地铁站内交织行人流的简化模型和数值模拟.物理学报,2012,61(14):1–9. Chen R,Li X,Dong L Y.Modeling and simulation of weaving pedestrian fow in subway stations.Acta Physica Sinica,2012,61(14): 1–9.(in Chinese)
[16]Jian X X,Zhang X N.Potential feld cellular automata model for pedestrian evacuation in a domain with a ramp.Mathematical Problems in Engineering,2014(2014):1–7.
[17]Yang L Z,Li J,Liu S B.Simulation of pedestrian counter-fow with right-moving preference.Physica A,2008,387(13):3281–3289.
[18]Kuang H,LI X L,Wei Y F,et al.Effect of following strength on pedestrian counter fow.Chinese Physics B,2010,19(7):1–9.
[19]Guo R Y,Huang H J,Wong S C.Route choice in pedestrian evacuation under conditions of good and zero visibility:Experimental and simulation results.Transportation Research:Part B,2012,46(6):669–686.
[20]周金旺,邝 华,刘慕仁,等.成对行为对行人疏散动力学的影响研究.物理学报,2009,58(5):3001–3007. Zhou J W,Kuang H,Liu M R,et al.Paired behavior effect on pedestrian evacuation dynamics.Acta Physica Sinica,2009,58(5): 3001–3007.(in Chinese)
[21]任 刚,丁晨滋,陆丽丽,等.基于元胞自动机的结伴过街行人流建模与仿真.交通运输系统工程与信息,2014,14(2):45–50. Ren G,Ding C Z,Lu L L,et al.Model and Simulation of group pedestrian fow on a crosswalk based on cellular automaton.Journal of Transportation Systems Engineering and Information Technology,2014,14(2):45–50.(in Chinese)
[22]宋卫国,于彦飞,范维澄,等.一种考虑摩擦与排斥的人员疏散元胞自动机模型.中国科学:E辑,2005,35(7):725–736. Song W G,Yu Y F,Fan W C,et al.A cellular automata evacuation model considering friction and repulsion.Science in China:E Edition,Engineering&Materials Science,2005,35(7):725–736.(in Chinese)
[23]Zhang P,Jian X X,Wong S C,et al.Potential feld cellular automata model for pedestrian fow.Physical Review E,2012(85):1–8. [24]Moussa¨ıd M,Perozo N,Garnier S,et al.The Walking behaviour of pedestrian social groups and its impact on crowd dynamics.PLoS ONE,2010,5(4):1–7.
[25]Schadschneider A,Klingsch W,Kl¨upfel H,et al.Evacuation dynamics:Empirical results,modeling and applications//Meyers R A. Extreme Environmental Events:Complexity in Forecasting and Early Warning.Berlin,Heidelberg:Springer-Verlag,2011,517–550. [26]Kirchner A,Kl¨upfel H,Nishinari K,et al.Discretization effects and the infuence of walking speed in cellular automata models for pedestrian dynamics.Journal of Statistical Mechanics:Theory and Experiment,2004,2004(10):1–21.
[27]Jiang Y Q,Zhang P,Wong S C,et al.A higher-order macroscopic model for pedestrian fows.Physica A,2010,389(21):4623–4635. [28]Zhao H K.A fast sweeping method for Eikonal equations.Mathematics of Computation,2005,74(250):603–627.
[29]Fruin J.The causes and prevention of crowd disasters//Smith R A,Dickie J F.Engineering for Crowd Safety.Amsterdam:Elsevier, 1993:99–108.
Dense crowd grouping evacuation strategy based on potential feld model
Jian Xiaoxia,Zhang Xiaoning*
(School of Economics and Management,Tongji University,Shanghai 200092,China)
A potential feld cellular automata model is proposed to reproduce the pushing down phenomena for crowd evacuation.In this model,the moving direction of the crowd on a domain with a ramp is navigated by combing a pushing force feld within a cost potential feld.In addition,the proposed model is employed to analyze the interaction among the ramp angle,the crowd initial density and the pushing down phenomena. The analysis shows that the two-people-together strategy may decrease the number of pedestrians falling to the ground,and the simulation shows that the percentage is only less than 10%of the pedestrians.
potential feld;cellular automata model;pushing;pushing down;two-people-together;ramp
U491
A
1000-5781(2016)06-0850-13
10.13383/j.cnki.jse.2016.06.013
菅肖霞(1981–),女,内蒙古包头人,博士,博士后,研究方向:行人交通建模与管理,Email:jianxiaoxia_2000@163.com;
2014-10-09;
2015-03-02.
国家自然科学基金资助项目(71531011;71401126;71125004);中国博士后科学基金资助项目(2014M551460;2015-T80457);中央高校基本科研业务费专项资金资助(10247201601164).
*通信作者
张小宁(1975–),男,安徽省安庆人,博士,研究员,教授,研究方向:交通优化与管理,Email:cexzhang@tongji.edu.cn.