基于微舵机控制的仿生鱼设计与实验分析
2017-01-19卢亚平宋天麟章月婷
卢亚平,宋天麟,章月婷
(苏州大学 应用技术学院,江苏 苏州 215325)
基于微舵机控制的仿生鱼设计与实验分析
卢亚平,宋天麟,章月婷
(苏州大学 应用技术学院,江苏 苏州 215325)
设计了微舵机控制的仿生鱼,结合鱼胸鳍和鱼尾鳍的配合动作,完成一系列的游弋动作。其中根据鱼类“波动推进理论”的游动机理,实现仿生鱼的前进、转弯运动;根据鱼类“胸鳍法理论”实现上浮、下潜运动;提出加减速游动方案,通过修改X值的方法,实现仿生鱼的加减速游。组装并进行水上模拟实验和水下实际实验,调试仿生鱼的各动作协调性,分析仿生鱼在水中的静态平衡和动态平衡问题。
微舵机;仿生鱼;波动推进理论;胸鳍法
0 引言
随着仿生鱼技术发展的成熟和社会关注度的提高,仿生鱼逐渐成为机器人研究的重点,目前科学家们研制出了许多高效率、高机动性和高娱乐性的水下仿生鱼,吸引着越来越多的研究者的兴趣。如:2002年日本成功利用高分子材料(人造肌肉)研制了一种仿生鱼,这种仿生鱼全长6.7 cm;2003年日本三菱重工业公司推出的金色鲤鱼外形机器鱼在东京展出供人观赏,这种机器鱼外形与真鱼一样,完全可以迷惑人们的眼睛。
目前,国内外设计的仿生鱼主要由直流电机或步进电机通过一定的传动机构实现鱼尾部的相关运动,或利用人造肌肉或电磁线圈的方法来实现仿生鱼尾部的运动。很少使用微型舵机的方法驱动鱼尾部的运动,实现仿生鱼的水中游弋,更没有使用微型舵机直接连接胸鳍,通过胸鳍舵机的摆动实现仿生鱼的上浮下潜。同时国内外设计的仿生鱼并没有充分利用仿生鱼的胸鳍和尾鳍的协调运动来实现仿生鱼的水中游弋,也没有丰富鱼类急游、慢游、转弯、下潜上浮的游姿[1-2]。
1 仿生鱼机械结构设计
本文通过研究分析不同鱼类的推进方法和游动姿态,设计了一条基于微舵机控制的仿生鱼。仿生鱼的机械结构由鱼头、鱼身、鱼尾和一对胸稽组成。鱼头安放控制模块(仿生鱼的大脑),鱼身部分安放电池(仿生鱼的动力源)。通过4个微舵机连接形成多自由度的机构,其中2个微舵机置于仿生鱼的尾部,通过舵机的摆动来实现急游、慢游,另2个舵机置于仿生鱼的鳃部和胸鳍,通过舵机的摆动来实现下潜、上浮。通过不同的游泳姿态组合,达到丰富人们视觉的效果[3]。设计结构如图1所示。
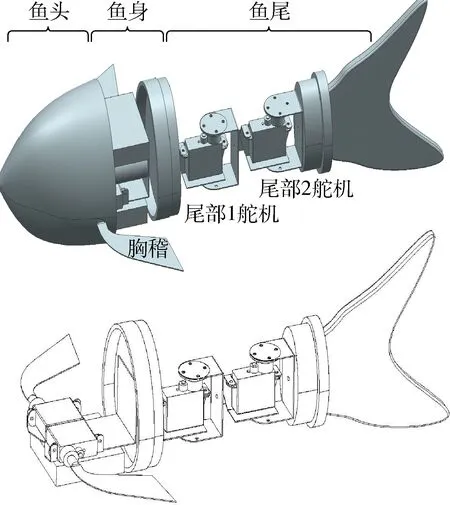
图1 仿生鱼机械结构设计
2 仿生鱼控制设计
仿生鱼右、左转弯动作控制方法:必须使得尾部产生一个单方向的转矩,在转矩的作用下实现鱼体转角。通过编程控制两尾部舵机,鱼尾前舵机偏置一定角度并保持,同时鱼尾后舵机以45°快速往复摆动。即,通过鱼尾前舵机的转向,再配合鱼尾后舵机45°角的摆动产生推力实现转弯。
仿生鱼加速、减速控制方法:通过MCU编程设置定时器中断(T0/T1)来控制两尾部舵机PWM波形占空比的变化速度,实现控制舵机往复摆动的频率,即改变舵机转动一定角度所需时间。时间短,鱼尾部来回摆动完成角度的速度加快,就会产生较大的前进推力,使得仿生鱼能以较快的速度前行;时间长,鱼尾部来回摆动完成角度的速度变慢,产生较小的前进推力,使得仿生鱼前进速度较慢[4]。
舵机的PWM波是一个周期为20 ms,且其脉宽在0.5 ms~2.5 ms之间变化的方波。T1定时中断设定为20 ms,T0定时中断设定为0.01 ms,根据脉冲变化范围(0.5~2.5 ms),此时可确定T0的定时中断次数范围为50~250。以50为起点,X为步长,从0.5 ms变化到2.5 ms的速度取决于X的大小,理论上当X=1时舵机要经过200次的20 ms脉冲周期才能从-90°摆动到90°,变化速度最慢。当X=10时舵机要经过20次的20 ms脉冲周期才能从-90°摆动到90°,速度较快。由此为仿生鱼的加减速游提供了很好的编程思路,X的大小决定了舵机的摆动速度[5]。舵机摆动速度与X的关系如图2所示。
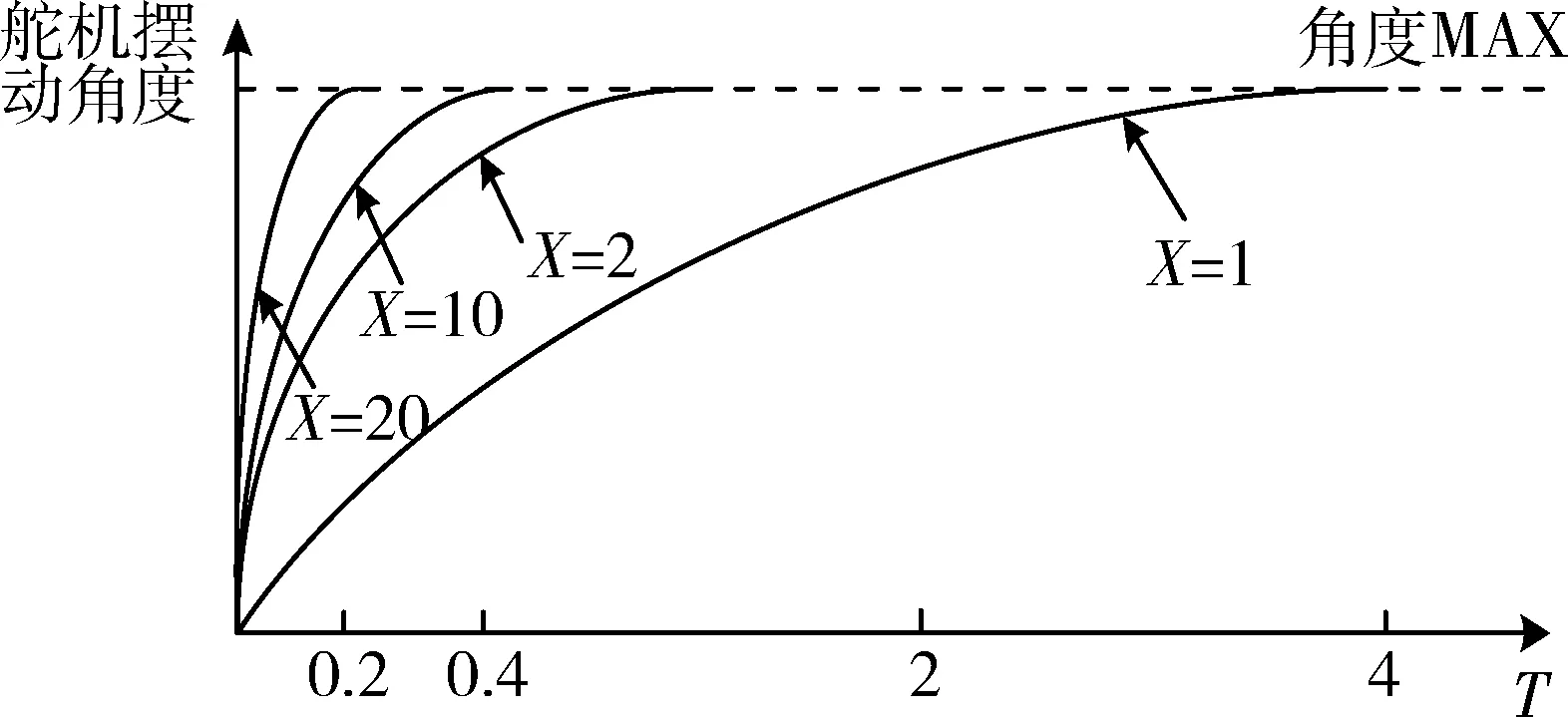
图2 舵机摆动速度与X的关系
仿生鱼上浮、下潜控制方法:仿生鱼的前部安装一对具有转动自由的胸鳍,在游动过程中,通过改变胸鳍的姿态,利用水流对胸鳍产生的升力或压力实现上浮下潜。当控制系统驱动两台胸鳍舵机转动时,若带动胸鳍的姿态倾斜向下,同时,两尾部舵机加速摆动,提升游速,会使两端胸鳍产生向下压力,仿生鱼下潜;当两台胸鳍舵机转动使胸鳍姿态倾斜向上,同时,两尾部舵机加速摆动,提升游速,会使两端胸鳍产生向上升力,仿生鱼则上浮;当胸鳍保持水平且仿生鱼游速较低时,不产生升力或升力较小,仿生鱼水平运动[6]。如图3所示。
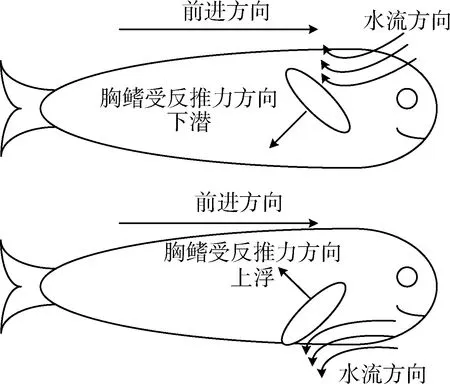
图3 仿生鱼下潜上浮动作示意图
3 水上模拟实验
水上模拟调试的首要任务是调整仿生鱼运动轨迹,使其符合波动推进理论的基本要求。在开始调试时,需先校准各舵机角度的初始位置(0°),通过编程调试各舵机的摆动,观察舵机摆动的相对位置关系,及时更改舵机角度或有缺陷的程序指令,确定各舵机位置与前一位置间的角度变化量,完成一个周期内每个关节的摆动姿态,使仿生鱼能够完成规定的运动轨迹。鱼体运动波形如图4所示,分别给出了调试并修正后左右摆动的轮廓图。可以看出鱼体运动轨迹遵循摆幅逐渐放大的正弦行波规律[7]。

图4 摆动周期内采样的关节位置

图5 仿生鱼的快慢速摆动频率
在调试过程中发现仿生鱼体的运动频率决定了鱼体摆动的速度,即单位时间内鱼体来回摆动的次数。摆动的次数越多,游速也越快。当舵机的供电电压为固定值6 V时,通过改变X值的大小可实现仿生鱼摆动频率的调节。仿生鱼的快慢速摆动频率测试结果如图5所示,慢速游动时的摆动频率为0.8 Hz,快速游动时的摆动频率为1.6 Hz,而鱼类游弋时摆动频率一般为0.5~2.5 Hz,仿生鱼摆动频率符合鱼类的游动要求。可见通过编程便能实现对仿生鱼的多级调速。当然在慢速游和快速游状态中都各需要一个合适的X值,必要时还可通过同时改变鱼尾摆动幅度和X值,以达到仿生鱼的加减速游动[8]。
此设计方案中,鱼体的几何特征、重心等对速度均有影响,它们影响仿生鱼在游动时的刚性问题。鱼体的几何特征涉及鱼尾的关节数、尾部长度占总长度的比例,而重心的布局致关重要。通过各参数的调整能够更好地完善波动推进理论[9]。
4 水下实际实验
仿生鱼下水前先在鱼身的底部加装配重,在配重的垂直重力影响下使仿生鱼在水中保持平衡,鱼体不侧翻。水下实际调试过程用相机拍摄视频,通过截拍得到大量仿生鱼水下运动图像。仿生鱼水面游弋实拍图如图6所示,通过这些图像进行仿生鱼水下运动的特征分析。在调试过程中得到大量漩涡形成和演变的连续图像,尾鳍拍动产生了一系列漩涡序列,漩涡是在尾鳍前缘卷起生成的,并在每次反向拍动时脱落,一个周期形成一对旋向相反的漩涡。并且发现鱼尾鳍在波动推进时主要是漩涡在起作用,在尾鳍的拍动中,水面卷起很强的锥形涡,并稳定地附着在尾鳍表面,形成很大的推进力。

图6 仿生鱼水面游弋实拍图
调试过程中发现,仿生鱼的航向稳定性与鱼尾的摆动频率有关,即仿生鱼的刚性问题受到推进速度的影响。在调试过程中,用相机进行记录,显示出在仿生鱼尾部不同的摆动频率下,鱼头的摆动幅度受到影响,摆动频率越大,仿生鱼的航向跟随性就越差,推进效率也越差。在不同频率下鱼头摆动曲线各不一样。鱼头的横向晃动幅度,即鱼的刚性问题。当鱼体摆动频率较低时(0.8 Hz),鱼头摆动曲线变化平缓,此时刚性最好。当鱼体摆动频率较高时(1.6 Hz),鱼头摆动曲线出现比较剧烈的超调,此时刚性最差。可见仿生鱼在低速游动时,摆动频率低,鱼头刚性好,推进效率高;而在高速游动时,摆动频率高,鱼头刚性差,推进效率受到很大影响。
本文对高速运动时刚性差的问题提出解决方案,通过减小鱼尾在高速时的摆动幅度来弥补刚性差的缺陷。实验测试证明,高速运动时减小鱼尾摆动幅度和修改合适的X值,能得到较好的仿生鱼刚性。
通过相机拍摄,同样得到大量仿生鱼的下潜动作图,如图7所示。下潜前胸鳍上翘,尾鳍加速摆动,水面激起漩涡,头部开始下潜,当尾部也完全淹没在水里后,水面漩涡消失。下潜完成后,仿生鱼在水底进行波动推进,从测试结果来看,水底的波动推进效果更佳,主要原因是尾部完全沉浸在水里后,动能量损失最小,鱼体受到的阻力也最小,仿生鱼推进效果更完美。

图7 仿生鱼下潜动作实拍图
仿生鱼上浮动作过程与下潜动作一致。测试得到仿生鱼在上浮过程中也有较好的实验效果,依靠作用在胸鳍上的浮力,以及尾鳍的推动完成上浮测试,由于仿生鱼在水底具有较高的推动效率,尾部摆出的旋涡反作用力能够充分作用在尾鳍上,因此上浮比下潜更容易实现[10]。
5 结论
通过仿生鱼机械结构、控制系统的设计,以及水上和水下两阶段的测试,实现仿生鱼在水中转弯、上浮下潜、加减速的游弋姿态。各姿态受到4个微舵机的协调控制,而各舵机的协调性受到X值的影响。通过修改X值可改变矩形波占空比的变化速度,提升鱼尾部的推动力,改善仿生鱼上浮下潜的效率。但是X值又影响着仿生鱼的航向稳定性。由此在不同的游弋姿态中给出一个合适的X值,对仿生鱼的仿生运动至关重要。
[1] 梁建宏,王田苗,魏洪兴.水下仿生机器鱼的研究进展I—鱼类推进机理[J].机器人,2002,24(2):107-111.
[2] 梁建宏,王田苗,魏洪兴,等.水下仿生机器鱼的研究进展II—小型实验机器鱼的研制[J].机器人,2002,24(3):234-238.
[3] 梁建宏,王田苗,魏洪兴,等.水下仿生机器鱼的研究进展III—水动力学实验研究[J].机器人,2002,24(4):304-308.
[4] 梁建宏,王田苗,魏洪兴,等.水下仿生机器鱼的研究进展IV—多仿生机器鱼协调控制研究[J].机器人,2002,24(5):413-417.
[5] 梁建宏,邹丹,王松,等.SPC-II机器鱼平台及其自主航行实验[J].北京航空航天大学学报,2005,31(7):709-713.
[6] 梁建宏,王田苗,魏宏兴.仿生机器鱼技术研究进展及关键问题探讨[J].机器人技术与应用,2003(3):14-19.
[7] 喻俊志,王硕,谭民.多仿生机器鱼控制与协调[J].机器人技术与应用,2003(3):27-35.[8] 喻俊志,陈尔奎,王硕,等.仿生机器鱼研究的进展与分析[J].控制理论与应用,2003,20(4):485-489.
[9] 刘军考,陈在礼,陈维山,等.水下机器人新型仿鱼鳍推进器[J].机器人,2000,22(5):427-432.
[10] 刘军考,陈维山,陈在礼.尾鳍的形状与运动参数对推进速度的影响[J].高技术通讯,2001,11(4):86-88.
Design and experimental analysis of bionic fish based on micro-servo control
Lu Yaping,Song Tianlin,Zhang Yueting
(Applied Technology College, Soochow University, Suzhou 215325, China)
In this paper, a bionic-fish controlled by micro-servo is designed. Combined with pectoral fin and tail fin movement, to complete a series of swimming action. According to the swimming mechanism of the "wave advance theory", the bionic fish’s forward and turn movement can be realized. According to fish "pectoral fin method" to realize the floating and sinking movement. Swimming program of adding and reducing speed is put forward, by modifying the X value, the acceleration and deceleration of bionic fish can be realized. Assembling the bionic fish and carrying out simulation experiments and underwater practical experiments, to debug the coordination of each action, and to analyze the static balance and dynamic balance of the fish in the water.
micro-servo; bionic-fish;wave propulsion theory;pectoral fins method
TH113
A
10.19358/j.issn.1674- 7720.2017.01.023
卢亚平,宋天麟,章月婷. 基于微舵机控制的仿生鱼设计与实验分析[J].微型机与应用,2017,36(1):76-78,82.
2016-09-08)
卢亚平(1982-),男,硕士,实验师,主要研究方向: 自动控制、机器人。
宋天麟(1963-),男,硕士,教授,硕士生导师,主要研究方向:机电一体化。
章月婷(1992-),女,本科,主要研究方向:机电一体化。
