小天体安全着陆与表面探测控制方法研究
2017-01-18刘延杰朱圣英崔平远
刘延杰,朱圣英,崔平远
(1.北京理工大学 宇航学院,北京 100081;2.深空自主导航与控制工信部重点实验室,北京 100081;3.飞行器动力学与控制教育部重点实验室,北京 100081)
小天体安全着陆与表面探测控制方法研究
刘延杰1,2,3,朱圣英1,2,3,崔平远1,2,3
(1.北京理工大学 宇航学院,北京 100081;2.深空自主导航与控制工信部重点实验室,北京 100081;3.飞行器动力学与控制教育部重点实验室,北京 100081)
针对探测器在小天体表面的弹跳式运动特点,提出一种表面运动控制方法。首先基于简化的运动模型,计算出探测器进行弹跳式转移所需的初始速度;然后通过对轨道方程的线性化,基于线性时变系统的求解方程,采用脉冲控制对每次弹跳的运动轨迹进行修正,增加控制精度;并分析转移距离与弹跳次数的关系;最后,以小行星1620 Geographos作为目标小天体进行仿真分析,验证了控制算法的有效性。结果表明,该控制方法可以应用于探测器在附着到小天体表面后的弹跳转移,也适用于弱引力环境下探测器的弹跳式探测。
小天体;表面运动;脉冲控制;转移距离
0 引 言
小天体是太空环境中具有极高探测价值的一类天体。附着探测是提升人类对小天体认知的重要手段。相比于大的行星天体,小天体具有质量轻、形状不规则的特点,这导致其附近呈现不规则弱引力场[1]。在这种引力场环境下,探测器在小天体附近的运动形式可以概括为:贴近小天体表面的轨道段、轨道运动与表面作用耦合的弹跳段、完全位于表面上的滑移滚动段。
针对小天体附近独特的运动形式,相关学者对其动力学特性和稳定性展开了研究。Guibout等构建了一个均匀旋转的均质三轴椭球模型,采用解析算法得到了一组平衡点,并对其稳定性进行了全面的分析[2]。Liu等采用一个旋转的均质立方体作为小天体模型,给出了忽略摩擦情况下立方体表面的平衡点和围绕平衡点的周期轨道,以及有摩擦情况下质点不从表面逃逸的条件[3]。Yu等基于多面体模型对粒子在Geographos小行星表面的运动行为进行了归纳和分析,并修正了多面体模型边界处的引力势函数奇异问题[4]。Tardivel等构建了球形探测器在不规则小行星表面的受力模型,并运用概率模型描述了小行星表面的障碍物情况[5]。
在小天体附近的弱引力环境下,任何微小的扰动都可能导致探测器离开小天体表面。在完成小天体附着时,为了避免反弹现象的发生,相关任务对着陆装置的构型都做了特殊的设计。JAXA的Hayabusa1任务中,着陆信标被设计成一个由若干小球填充的袋子,在信标与目标小行星发生碰撞后,通过小球的相互碰撞,将能量消耗掉,使得信标有较小的恢复系数[6]。ESA罗塞塔任务的着陆器菲莱通过起落架上的阻尼装置消耗掉一部分碰撞能量,冷喷气系统提供向下的推力,另外,菲莱会释放两个鱼叉进入地表,使自身固定[7-8]。TAG(touch-and-go)是弱引力环境下,探测器完成对小天体表面采样收集的有效手段。在TAG过程中,探测器通常先在目标小天体上方进行悬停。待确定采样点以后,探测器下降到小天体表面,在只做几秒钟的停留完成采样任务后迅速上升离开小天体表面。TAG采样已经成功应用于Hayabusa任务[9],OSIRIS- Rex[10]任务也将采用这种方式完成采样返回。
由于小天体附近引力微弱,表面不能提供足够的摩擦力,传统的轮动式巡视器无法有效运动,因此小天体表面巡视器通常也采用弹跳式方法。针对探测器在小天体表面的弹跳移动问题,Ulamec对小天体探测任务中弹跳式探测器的应用价值进行了深入研究,并且在基于旋转质量块加速弹跳原理的基础上提出了撑杆跳弹跳概念[11]。前苏联的Phobos 2任务中携带了一个计划着陆于火卫一的弹跳探测器PROP-F,虽然任务失败,但弹跳探测器的概念对小天体探测具有很高的参考价值[13]。Hayabusa任务中,MINERVA巡视器的驱动装置为扭矩电机,它可以提供小于10 cm/s的跳跃速度。Yoshimitsu基于MINERVA巡视器建立了小天体表面弹跳过程动力学,并分析了不同环境参数下弹跳性能与应用前景[15]。Bellerose针对小天体弹跳移动方法,基于椭球体引力模型,提出了探测器移动距离和所需时间的解析计算方法,并基于滑模控制思想研究了单个和多个探测器控制方法[14]。Mège等针对小天体复杂地形设计了对附着环境具备鲁棒性的弹跳运动机构,弹跳距离可以从几米到几十米[12]。
弱引力环境下进行附着任务极易发生反弹,如果没有后续操作,探测器将长时间的在小天体表面弹跳运动,造成附着任务的失败。为了避免这一现象的发生,提高小天体附着探测任务的稳定性,本文提出一种表面运动控制方法,使得探测器在附着到小天体表面后能够以弹跳的方式进行运动,最终稳定停留在原着陆点或转移到新的目标点。同时,这一控制方法也适用于弱引力环境下探测器的弹跳式探测。
1 动力学模型
1.1 多面体引力场模型
本文采用小行星1620 Geographos作为目标小天体,其多面体模型如图 1所示。定义小天体固连坐标系如下:原点位于小天体质心,z轴与小天体最大惯量轴即自转轴重合,x与y轴分别与最小和中间惯量轴重合,x,y,z三轴满足右手法则。
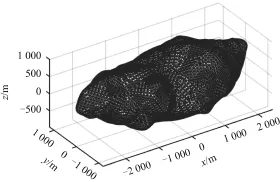
图1 小行星1620 Geographos多面体模型Fig.1 Polyhedral model of asteroid Geographos
把小天体近似为内部密度恒定的多面体以后,可以将引力势函数写成如下的形式:
其中:G表示万有引力常数;ρ表示小天体密度;re和rf分别表示场点到多面体边和面上任意点的距离;Le的值定义如下

其中:ae和be分别表示场点到任意边两顶点的距离;ee为该边的长度;Ff为构成边e的两个面的外法线矢量的点积,即

Ee定义如下

ωf的值定义如下

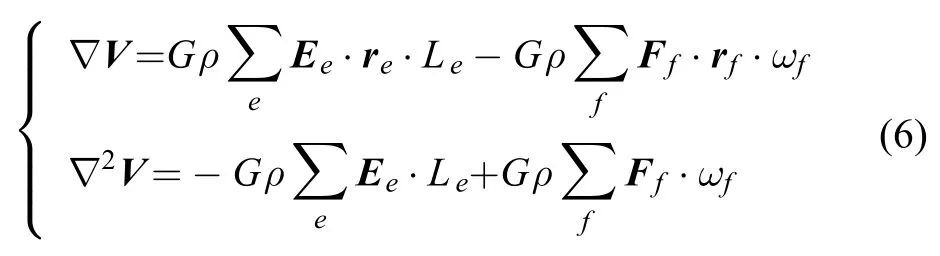
根据以上多面体引力场模型,能够计算场点处的引力势能,通过求引力势函数的一阶和二阶导数,可以得到场点处的引力加速度和Hessian矩阵:
1.2 轨道段动力学方程
探测器在小天体附近的运动包含轨道段和表面段,小天体固连坐标系下的轨道段运动方程为
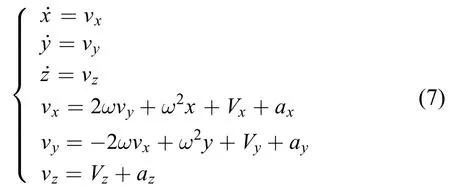
其中:ω表示目标小天体的自旋角速度;Vx、Vy和Vz表示沿坐标轴方向的引力加速度分量,可以由公式(6)计算得到;ax、ay和az表示沿坐标轴方向的控制加速度。
1.3 表面段动力学方程
表面段运动过程可以分解为法向和切向,分解过程如图 2所示。由于表面段运动时间很短,这里忽略掉探测器的滑移过程,仅考虑碰撞。假设探测器与小天体表面接触前具有入射速度vc,碰撞后的法向速度由恢复系数cr(0≤cr≤1)来确定。
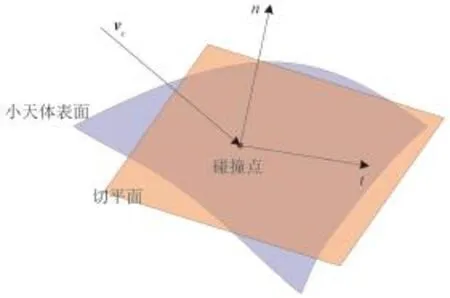
图2 表面段运动分解Fig.2 Concept of surface dynamics

其中:vn0和vn1分别表示碰撞前和碰撞后的法向速度。切向运动满足如下的关系:

其中:vt0和vt1分别表示碰撞前和碰撞后的切向速度;μr表示当地的摩擦系数。
1.4 简化模型
忽略小天体自旋和引力不规则变化的影响,可以将探测器的弹跳运动近似为抛物运动。通过对抛物运动的分析,可以近似得到通过一次弹跳将探测器从起始点转移到目标点所需要的速度vi。
定义矢量R为起始点指向单次弹跳目标点的矢量,g为起始点处的引力加速度矢量。构建R-g平面如图 3所示。R方向的单位矢量为
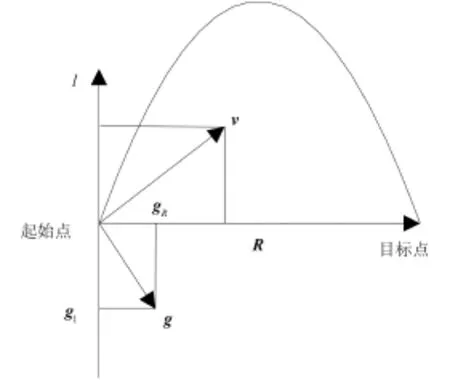
图3 抛物运动模型Fig.3 Parabolic motion

在R-g平面内,定义矢量l与R垂直,并指向小天体外侧。gl和gR分别为g沿l和R方向的分量,假设引力加速度g不变,给定期望弹跳时间Δt,那么vi沿l方向的速度分量为

vi沿R方向的速度分量为

将l方向和R方向的速度合成,可以得到一次弹跳将探测器从起始点转移到目标点所需要的速度vi为

由式(13)可以近似得到通过一次弹跳将探测器从起始点转移到目标点所需要的速度vi,但是由于忽略了小天体自旋和引力不规则变化的影响,探测器的实际附着位置将会偏离预定的目标点。因此需要在探测器飞行过程中施加轨迹修正指令,对探测器的运动轨迹进行修正。
2 控制方法
本文所提出的控制方法,可以概括如下:1)在起始点与目标点之间设置多个中间路径点;2)在起始点处,通过式(13)求出探测器到第一个中间路径点所需的初始速度vi,并由脉冲发动机实现这一速度;3)当探测器飞行一段时间后,施加轨迹修正指令,使探测器到达第一个中间路径点;4)以当前路径点作为起始点,重复前三步,直到探测器抵达目标点;5)施加反向速度脉冲,使探测器最终停留在目标点。表面运动控制方法示意图如图 4所示。本节将重点介绍轨迹修正算法的实现。
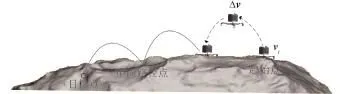
图4 控制方法示意图Fig.4 Scenario of hopping exploration on the small body
2.1 模型线性化

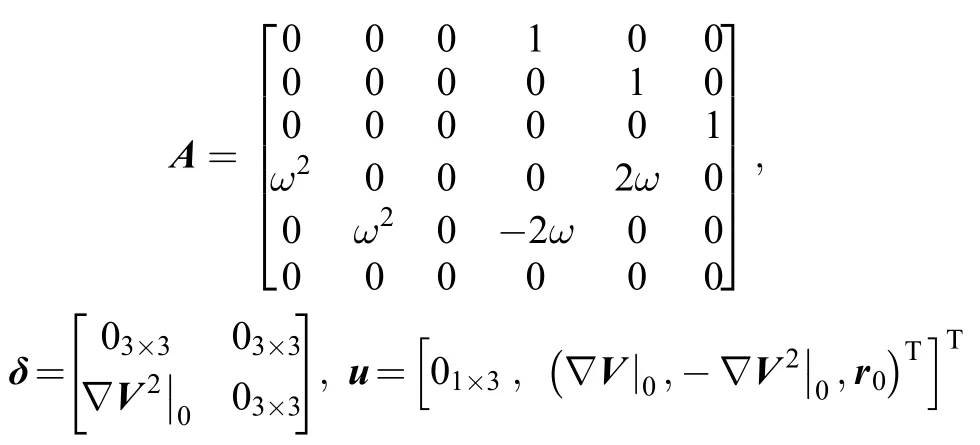
下标0表示相关参数在初始状态处的取值。仅保留0阶项和1阶项,可以得到轨道运动的线性化方程为


2.2 修正速度确定
方程(15)为线性定常系统,该系统的解为


将方程(17)代入方程(16)可以得到

已知探测器的当前位置r0和目标位置rt,并给定转移时间tf,通过对方程(18)进行性逆运算,可以求出轨迹修正后的速度为

矩阵G和Φ的取值如下:

由式(19)可以求出轨迹修正点的速度增量为

以上分析给出了单次弹跳的控制过程,在探测器在小天体表面进行弹跳运动时,弹跳次数的设计应该考虑转移距离的影响。图 4给出了初始速度vi大小固定的情况下,即(其中C为一常数),小行星Geographos表面某点的初始法向速度与转移距离的关系图。由图 5可以发现,当转移距离较远的时候,法向速度可能会超越当地的法向逃逸速度,这会使探测器在飞行一段时间后脱离引力束缚,离开小天体表面。另外,当转移距离较远时,误差积累也较大,这使得后续的轨迹修正过程燃耗增加。基于以上考虑,对于距离远的目标点,应该使探测器通过多次弹跳到达。
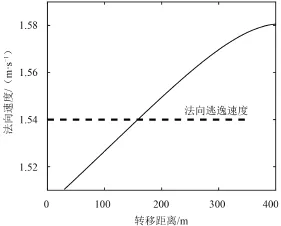
图5 转移距离与法向初始速度Fig.5 Relationship between transfer distance and normal initial velocity
3 仿真分析
3.1 抛物运动仿真
3.2 脉冲控制仿真
本组仿真采用与前一次仿真相同的初末位置,在这组仿真中,探测器受初始速度vi的驱动,以弹跳的形式向目标点运动,当探测器飞行一段时间并到达一定高度后,由式(21)求出轨迹修正指令Δv,并最终完成一次弹跳运动。仿真结果如图 7所示。
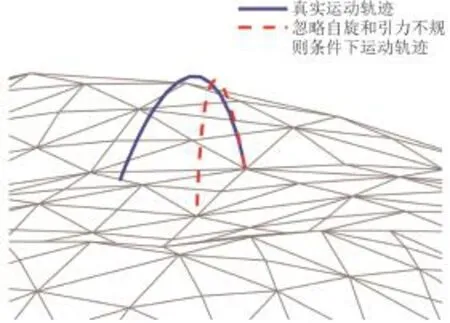
图6 弹跳运动轨迹Fig.6 Bouncing trajectory in 3D
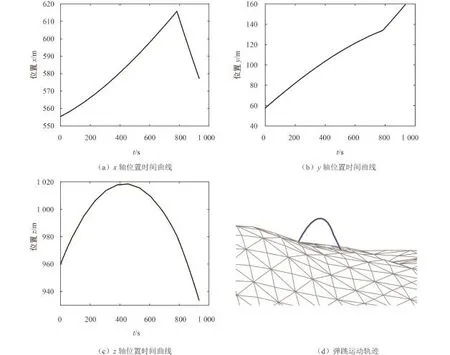
图7 固连坐标系下运动轨迹Fig.7 Trajectory histories in body-fixed coordinate
由图 7可以看出,运动轨迹可以分为两段,前一段轨迹为轨迹修正指令作用前的结果,与前一次的仿真轨迹重合,后一段为轨迹修正指令作用后的运动轨迹。最终,探测器能够准确地抵达目标点。
3.3 远距离弹跳转移
前两组仿真验证了文中所提的表面运动控制方法在单次弹跳运动里的控制效果。本组仿真用来验证该控制方法在远距离转移的控制效果。初始点的位置矢量为,目标点的位置矢量为。分别设置3个中间路径点和4个中间路径点,使探测器以4次弹跳运动和5次弹跳运动的方式到达目标点,在目标点处,施加与当前速度等大小的反向速度脉冲,使探测器最终停留在目标点。运动轨迹如图 8所示。由仿真结果可以发现,探测器准确抵达目标点,并且在整个运动过程中没有发生逃逸。
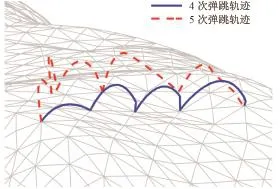
图8 固连坐标系下运动轨迹Fig.8 Trajectory histories in body-fixed coordinate
4 结 论
本文针对探测器在小天体表面的弹跳式运动特点,提出了一种表面运动控制方法。该控制方法可以应用于探测器在附着到小天体表面后的弹跳转移,也适用于弱引力环境下探测器的弹跳式探测。
本文首先对探测器在小天体附近运动的引力场模型和动力学模型进行了介绍,并基于简化的运动模型,计算出探测器进行弹跳式转移所需的初始速度;通过对轨道方程的线性化,基于线性时变系统的求解方程,采用脉冲控制的方法对每次弹跳的运动轨迹进行修正,增加了控制精度;同时分析了转移距离与弹跳次数的关系;最后,以小行星1620 Geographos作为目标小天体进行仿真分析,验证了控制方法的有效性。
[1]崔平远,乔栋.小天体附近轨道动力学与控制研究现状与展望[J].力学进展,2013,43(5):526-539.Cui P Y,Qiao D.Research progress and prospect of orbital dynamics and control near small bodies[J].Advances in Mechanics,2013,43(5):526-539.
[2]Guibout V,Scheeres D J.Stability of surface motion on a rotating ellipsoid[J].Celestial Mechanics and Dynamical Astronomy,2003,87(3):263-290.
[3]Liu X,Baoyin H,Ma X.Dynamics of surface motion on a rotating massive homogeneous body[J].Science China Physics,Mechanics and Astronomy,2013,56(4):818-829.
[4]Yu Y,Baoyin H X,Modeling of migrating grains on asteroid’s surface[J].Astrophysics and Space Science,2015,335(1):43-56.
[5]Tardivel S,Scheeres D J,Michel P,et al.Contact motion on surface of asteroid[J].Journal of Spacecraft and Rockets,2014,51(6):1857-1871.
[6]Sawai S,Kawaguchi J,Scheeres D,et al.Development of a target marker for landing on asteroids,[J].Journal of Spacecraft and Rockets,2001,38(4):601-608.
[7]Kömle N I,Ball A J,Kargl G,et al.Using the anchoring device of a comet lander to determine surface mechanical properties[J].Planetary and Space Science,1997,48(12):1515-1538.
[8]Ulamec S,Biele J.Surface elements and landing strategies for small bodies missions-philae and beyond[J].Advances in Space Research,2009,44(7):847-858.
[9]Kubota T,Otsuki M,Hashimoto T,et al.Touchdown dynamics for sampling in hayabusa mission[C]//In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit.Keystone:AIAA,2006:2006-6539.
[10]Berry K,Sutter B,May A,et al.Osiris-rex touch-and-go (TAG)mission design and analysis[C]//36th Annual AAS Guidance and Control Conference.Breckenridge:AAS,2013:13-95.
[11]Ulamec S,Kucherenko V,Biele J,et al.Hopper concepts for small body landers[J].Advances in Space Research,2011,47(3):428-439.
[12]Mège D,Gurgurewicz J,Grygorczuk J,et al.The Highland terrain hopper (hopter):concept and use cases of a new locomotion system for the exploration of low gravity solar system bodies[J].Acta Astronautica,2016(121):200-220.
[13]Sagdeev R Z,Zakharov A V.Brief history of the Phobos mission[J].Nature,1989,341(6243):581-585.
[14]Bellerose J,Scheeres D J.Dynamics and control for surface exploration of small bodies[C]//Proceedings of AIAA/AAS 2008 Astrodynamics Specialist Conference.Honolulu:AIAA,2008:2008-6251.
[15]Yoshimitsu T,Kubota T,Nakatani I,et al.Micro-hopping robot for asteroid exploration[J].Acta Astronautica,2003,52(2):441-446.作者简介:刘延杰(1988- ),男,博士研究生,主要研究方向:深空探测器自主导航与控制。E-mail:liuyanjie567@126.com
A Pulse Control Strategy of Landers for Hopping Exploration on Small Bodies
LIU Yanjie1,2,3,ZHU Shengying1,2,3,CUI Pingyuan1,2,3
(1.Institute of Deep Space Exploration,Beijing Institute of Technology,Beijing 100081,China;2.Key Laboratory of Autonomous Navigation and Control for Deep Space Exploration,Ministry of Industry and Information Technology,Beijing
100081,China;3.Key Laboratory of Dynamics and Control of Flight Vehicle,Ministry of Education,Beijing 100081,China)
Surface investigation is an effect way to improve the cognition of small bodies for human being.Considering the impacts of the irregular micro-gravity near small bodies,the lander may bounce above the surface when touches down which is a dangerous situation for landing.Meanwhile,the movement of the surface detector is generally achieved by hopping ways.In this paper,a pulse control strategy is developed in order to improve the stability and accuracy for small body landing and long-distance transfer,and the corresponding guidance law is developed.This control strategy can be used for the scenarios of both re-landing and multi-hopping exploration on a small body.Firstly,the velocity pulse is exerted at the initial points if the transfer is needed.Such velocity pulse can be computed based on the parabolic movement.Then,the trajectories are corrected based on the pulse control.The proposed guidance law is flexible enough to be implemented in real time for small body landers.To certificate the performance of the proposed control strategy,simulations are conducted and the effectiveness and accuracy are analyzed.
small body;hopping;pulse control;transfer distance
V448.21
A
2095-7777(2016)04-0370-7
10.15982/j.issn.2095-7777.2016.04.009
刘延杰,朱圣英,崔平远.小天体安全着陆与表面探测控制方法研究[J].深空探测学报,2016,3(4):370-376.
Reference format:Liu Y J,Zhu S Y,Cui P Y.A pulse control strategy of landers for hopping exploration on small bodies [J].Journal of Deep Space Exploration,2016,3(4):370-376.
[责任编辑:宋宏]
2016-07-28;
2016-08-10
国家重点基础研究发展计划“973”项目(2012CB720000);国家自然科学基金资助项目(61374216,61304226,61304248);教育部博士点基金资助项目(20121101120006)
