电磁悬浮高精密工作平台建模研究
2017-01-18郑俊娜
郭 亮,郑俊娜
(浙江理工大学机械与自动控制学院,杭州 310018)
电磁悬浮高精密工作平台建模研究
郭 亮,郑俊娜
(浙江理工大学机械与自动控制学院,杭州 310018)
对一种6自由度电磁悬浮高精密工作平台进行了建模研究,利用标量磁位法和等效磁路法分别建立了平台的直线电机和电磁铁的电磁模型,并利用二维有限元和样机实验结果进行了模型准确性验证。进而针对等效磁路法无法准确表征电磁铁非线性电磁特性的问题,提出了一种新型BP神经网络建模方法。该方法将曲线拟合引入BP神经网络技术,可实现小样本下的准确学习。实验结果表明:该建模方法可将计算误差降至约3%,可满足电磁悬浮工作平台控制系统的精确建模要求。
高精密工作平台;建模方法;有限元;解析法;BP神经网络
0 引 言
先进制造业对精密机械提出了加工范围广、自由度多和定位精度高等要求,磁悬浮式电磁工作台成为国内外研究的焦点,国内外学者提出了多种不同驱动平台的结构。Kim等[1]研制了一种由4个直线电机驱动的磁悬浮工作平台,并使用矢量磁位法进行了建模和分析;该结构具有6个自由度,x、y轴方向驱动范围为数十厘米,具有良好的驱动范围和精度,但其水平和垂直力均由直线电机提供,多个自由度间的电磁和机械耦合增加了控制的难度。为了进一步提高驱动范围,Compter[2]提出了一种6自由度平面电机式磁悬浮工作平台,并采用有限元法和矢量磁位法进行了建模和分析;该平台同样采用了4组绕组构成二维阵列式结构,提高了永磁体集成度,其动圈式结构可使x、y轴方向驱动范围在理论上无限扩展。张新华等[3]同样提出了采用4组绕组阵列构成的平面电机式磁悬浮工作平台结构,并分析了电流的配置方案。而Jansen等[4]提出的6自由度平面电机,寇宝泉等[5]提出的3自由度平面电机,郭亮等[6-7]提出的5自由度平面电机式磁悬浮工作平台结构,则进一步提高了绕组结构的集成度,使得工作平台结构更加紧凑,运动体约束度进一步降低。但上述高集成度的平面电机式结构均存在单一线圈必须同时提供x、y、z多轴作用力、多自由度间的磁场和电磁力耦合严重、动态过程中难以实现运动体空间姿态的精确调整等问题。
为了解决现有磁悬浮工作平台中各自由度间的耦合问题,郭亮等[8]构建了一种可实现水平力和悬浮力解耦控制的新型磁悬浮式工作平台结构。该平台采用4个直线电机提供x轴、y轴方向的水平力,采用4个电磁铁提供z轴方向的垂直悬浮力。该平台驱动范围与Kim等[1]提出的结构驱动范围近似,但从根本上解决了平面电机式磁悬浮工作平台的水平和悬浮方向间的电磁场耦合问题,降低了控制的难度。文献[8]主要对该平台的结构、原理进行了介绍,使用有限元法对其进行了建模和分析。本文将在文献[8]基础上对该工作平台进行解析建模研究。虽然该平台有限元模型的准确性已得到证实,但其计算时间过长,不适用于优化设计和平台动态控制。建立可准确、快速获得电磁参数的解析模型是实现该工作平台高精度控制的基础,也是本文的主要研究内容。
1 永磁直线电机建模
1.1 电磁悬浮式高精密工作平台基本结构
构建的电磁悬浮式高精密工作平台基本结构如图1所示。运动体为集成的平台式结构,运动体上方安装有4个电磁铁,工作状态下可通过分别调节电磁铁中的直流电流,控制运动体z轴、θx和θy3个自由度内的运动。运动体下表面粘贴有4组Halbach永磁体阵列,与下方的4组空心绕组对应组成4个永磁直线同步电机。其中2个直线电机沿x轴放置,2个直线电机沿y轴放置,可分别提供x轴方向或y轴方向的水平推力。工作状态下可通过分别调节直线电机交流电流幅值和相位,控制运动体x轴、y轴和θz3个自由度的运动。与文献[8]中的平台结构相比,本文将4个电磁铁的位置从平台的4个角,分别移动至4条边的中间。新结构中θx和θy自由度的控制由原来的4个电磁铁降为2个电磁铁,进一步降低了控制的难度。

图1 磁悬浮式高精度工作平台结构
设图1中4个电磁铁提供的悬浮力分别为f1z、f2z、f3z和f4z,两个x轴方向放置的永磁直线电机提供的水平推力分别为f1x和f2x,两个y轴方向放置的永磁直线电机提供的水平推力分别为f1y和f2y,l为直线电机中心到平台中心线的距离,L为电磁铁中心到平台中心线的距离,则x轴、y轴、z轴和θx、θy、θz六个自由度受到的电磁力和扭矩公式分别如下:
(1)
其中:fx为x轴方向的推力;fy为y轴方向的推力;fz为z轴方向的悬浮力;Tx为绕x轴θx方向的扭矩;Ty为绕y轴θy方向的扭矩;Tz为绕z轴θz方向的扭矩。
由于该驱动平台中电磁铁和永磁直线电机结构具有良好的对称性,f1x、f2x、f1y和f2y的电磁模型和控制策略基本相同,f1z、f2z、f3z和f4z的电磁模型和控制策略基本相同。故下述研究中,将重点以x轴方向放置的永磁直线电机和任一电磁铁为例,研究精确建模方法,最终得到电流幅值、电流相位、气隙高度等输入量与输出电磁力f1x和f1z间的精确数学关系,为该平台的精密控制提供数学基础。
1.2 永磁直线电机解析法建模
该磁悬浮工作平台水平驱动力由2个沿x轴方向和2个沿y轴方向放置的三相空心绕组式永磁直线同步电机提供。以x轴方向放置的电机为例,该电机基本结构如图2所示。其永磁体采用Halbach式阵列结构,该结构可在绕组侧形成较高的磁通密度,达到提高电机电磁力的目的。其永磁体水平磁化强度Mx和垂直磁化强度Mz的变化周期均为T=2τ(τ为极距)。设阵列中水平充磁与垂直充磁的永磁体宽度相等,均为τ/2,则磁化强度曲线分布如图3所示。对磁化强度曲线进行周期延拓后,对其进行傅立叶分解,得到永磁体磁化强度公式为[1]:
(2)


图2 Halbach永磁直线同步电机结构
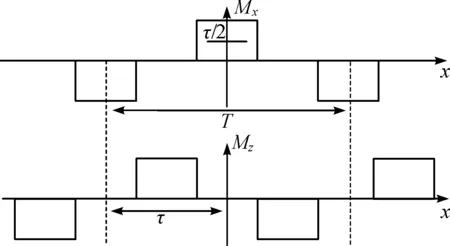
图3 磁化强度曲线分布
根据麦克斯韦方程可知各区间下的磁场边界条件为:
将式(2)带入边界条件,得出该永磁体矩阵在给定气隙高度的磁密分量计算式为:
(3)

电机主要参数如表1所示,采用式(3)计算得到气隙高度1mm处磁通密度的分布如图4所示。图中横坐标为x轴位置,纵坐标为磁通密度的x轴分量。从式(3)可知,z轴分量与x轴分量幅值相同,仅存在相位差异。从图4中可以看出,该解析模型得到的气隙高度1 mm处的磁通密度为周期性良好的平顶波,周期为25.6 mm,幅值约为0.75 T。图4所示的解析模型和有限元模型的磁密计算结果表明:虽然解析模型中采用的周期型拓展方法无法准确地计算出永磁体横向两端磁场的衰减情况,但由于直线电机磁场没有饱和,有限元模型和解析模型得到的磁通密度计算结果吻合度仍然十分良好。两种计算方法的气隙磁密差值仅约为0.01 T,仅为幅值的1.2%,因此解析模型的准确性得到了有效验证。
表1 永磁直线同步电机主要参数表
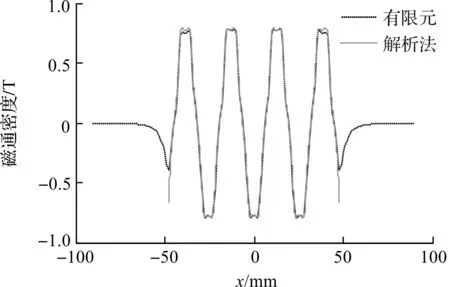
图4 气隙高度1 mm处的磁通密度分布
由于沿x轴方向放置的直线电机绕组中电流仅有y轴分量I,根据洛伦兹力基本公式[9],可得永磁直线电机中电磁力积分公式为:
(4)
其中:h为绕组z向厚度;lx为直线电机x轴方向有效长度;ly为电机y轴方向有效宽度;J为绕组的电流密度。
分解上式中的磁通密度x和z分量,并以面电流的方式引入三相绕组电流,式(4)可细化为:
(5)
其中:Fx为水平推力;Fz为垂直吸力;Ja为A相绕组的电流密度;Jb为B相绕组的电流密度;Jc为C相绕组的电流密度。
当三相绕组初始位置如图2所示时,以A相绕组电流为例,其线电流密度在空间的分布如下:
(6)
其中:Jm为电流密度幅值;θ为电流相位角。

(7)

将电流相位:θ=-πx/τ+θ0代入式(7),仅考虑磁场基波和含量较高的5次谐波,忽略磁场中的高次谐波,可得动子z轴高度为g mm,沿x轴平动时的水平推力和悬浮吸力分别为:
(8)
由式(8)可知,直线电机水平推力和悬浮力与电流初始相位角θ0有关。由于该平台仅需直线电机提供水平推力,故控制时需保持θ0为0,即id=0,此时水平方向的推力为最大值,而垂直方向的悬浮吸力为0。推力幅值与极距、电流密度、绕组纵向长度成正比,与悬浮高度呈指数性衰减。虽然在5次谐波磁场作用下,电磁力会产生6次频的微幅波动,但图5所示的相电流有效值为1 A,动子高度为2 mm时的推力变化曲线表明,推力均值为27.5 N时,波动幅值仅为均值的2%,推力波动可近似忽略。与有限元分析结果的对比证实,解析模型计算结果与有限元计算结果之间差值仅为0.02 N,小于均值的0.1%,进一步证实了解析模型的准确性。

图5 推力波动
2 电磁铁建模
2.1 电磁铁解析法建模
高精度工作平台的上方放置4块圆柱形电磁铁,利用电磁铁与平台上表面铁板之间的吸力,可实现悬浮方向的驱动。平台4个边的悬浮高度可由4个电磁铁的励磁电流进行分别控制。当4个电磁铁的受力不均衡时,平台将围绕x和y轴产生旋转。4个电磁铁的结构对称,其轴剖面如图6所示。

图6 电磁铁悬浮结构图
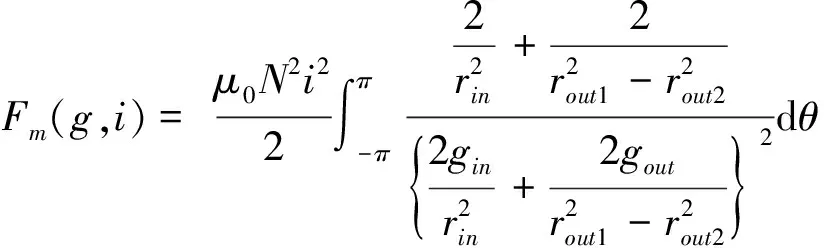
图6中的电磁铁结构包括电磁铁铁心、平台上部铁板以及两层气隙部分,分析中采用等效磁路法进行计算。图6中右半侧示出了电磁铁中的等效磁路,其中Rt1、Rt2、Rt3代表了电磁铁各部分铁心对应的磁阻值,Rg1、Rg2代表了各部分气隙对应的磁阻值。基于能量Wm导数法,电磁吸引力Fm(g,i)可由式(9)得到:
(9)

(10)

2.2 样机实验验证
为了验证解析模型的准确性,本文构建了电磁铁样机并搭建了图7所示的电磁悬浮测试系统。悬浮电磁铁的主要参数如表2所示。系统构架平台下方固定了一片4 mm厚铁片,电磁铁采用吸附方式实现悬浮,悬浮高度由电涡流传感器实时检测,并通过数据采集卡将数据输送至上位机,上位机通过控制驱动电路运行,以达到调节悬浮高度的目的。为了验证解析模型的准确,样机实验中保持平台结构重量不变,通过调节电磁铁输入电流,对电涡流传感器输出的平台悬浮高度变化曲线进行了检测,得到的实验结果如图8所示。从图8中可以看出解析模型计算得到的数值与实验值差异较大,均差约为16.1%,且随着电流的增加,误差呈增大趋势。
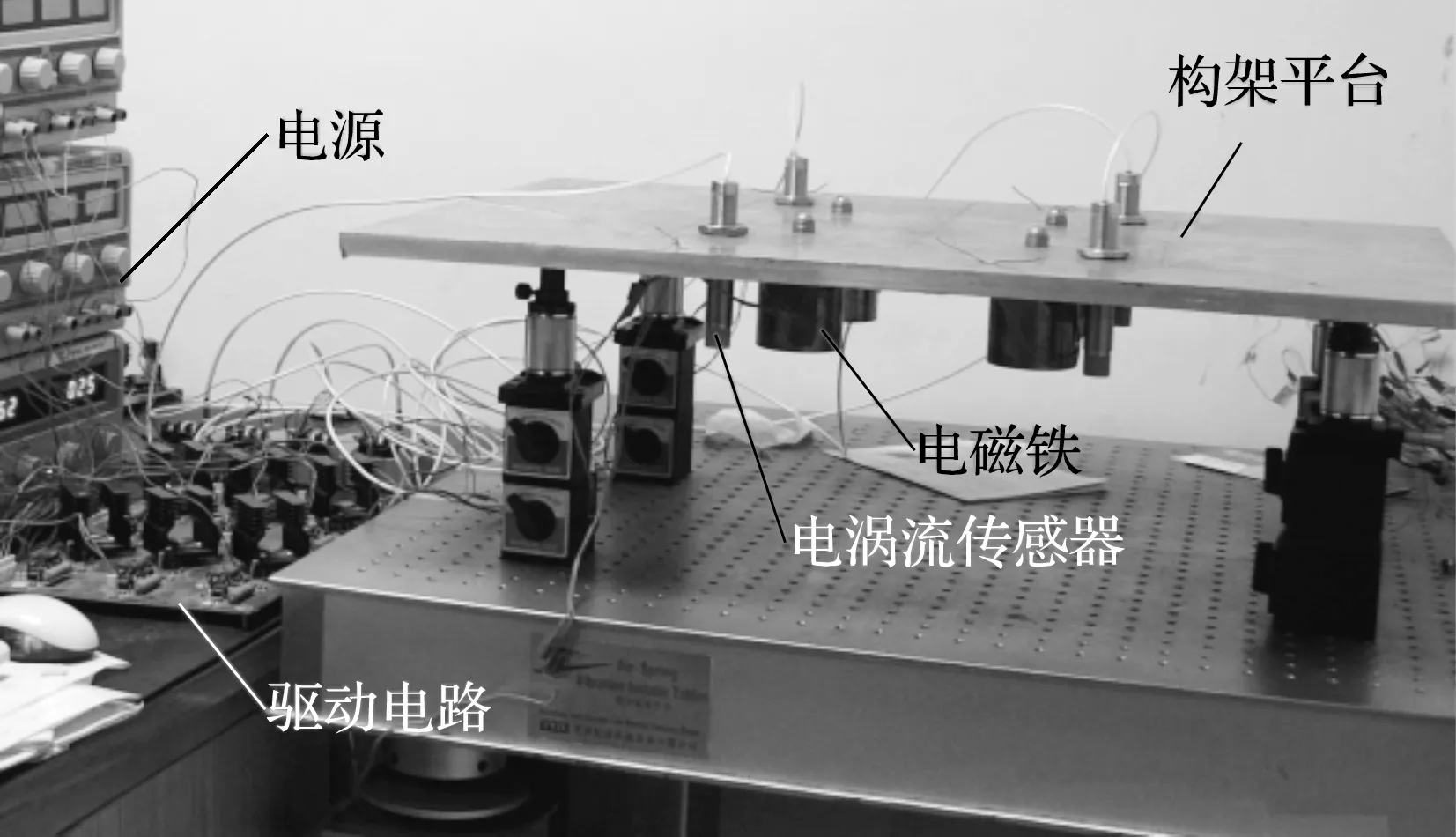
图7 电磁铁测试系统照片
产生误差的原因主要有两点:a)吸附铁板和电磁铁采用的电工纯铁材料易饱和,BH曲线非线性强,而解析模型难以准确描述磁场饱和引起的非线性影响,常忽略铁心磁阻的存在;b)电磁铁和吸附铁皮间、电磁铁内外铁心之间均存在漏磁,且漏磁会随着悬浮高度的变化而改变,解析模型对此难以准确模拟。故本文采用的解析方法不适用于电磁铁的精确建模。
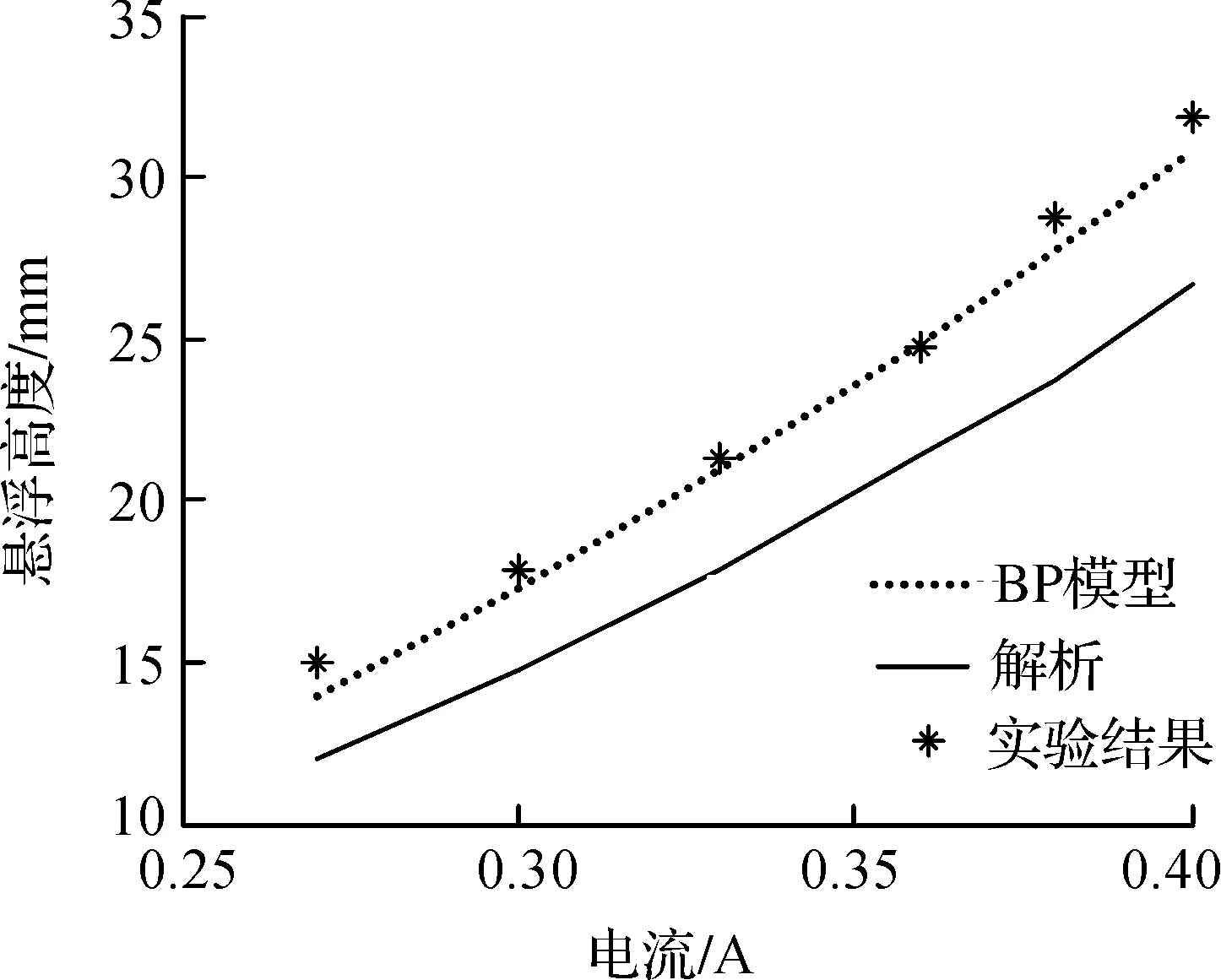
图8 悬浮高度随电流变化情况
2.3 电磁铁的BP神经网络法建模
有限元法与解析法相比,可以更加真实地描述分析对象的非线性材料特性和漏磁分布,适合计算磁场饱和系统的电磁特性。但有限元法计算耗时较长,不适用于参数多变且实时性要求高的控制系统建模。
为了有效缩短有限元建模所需计算时间,本文以有限元计算结果为学习样本,采用具有误差反传的前馈BP神经网络对工作平台的电磁力特性进行建模。为了解决因有限元计算结果有限而引起的神经网络小样本学习误差问题,在建模过程中引入了曲线拟合方法。
由于电磁悬浮力的大小主要由电磁铁的电流及其与平台间的气隙高度决定,故在本研究中详细分析了电磁铁电流在0~0.4 A、气隙高度在0.2~4.0 mm范围内变化时,悬浮力的变化情况。并基于有限元分析结果进行了多项式曲线拟合,得到了在一定的电流或者气隙高度下电磁力的变化公式。图9
为电磁铁不同励磁电流下电磁悬浮力随气隙高度变化的曲线族,从图中可以看出多项式拟合效果良好,各电磁力拟合结果与初始值的均差值均小于2%。
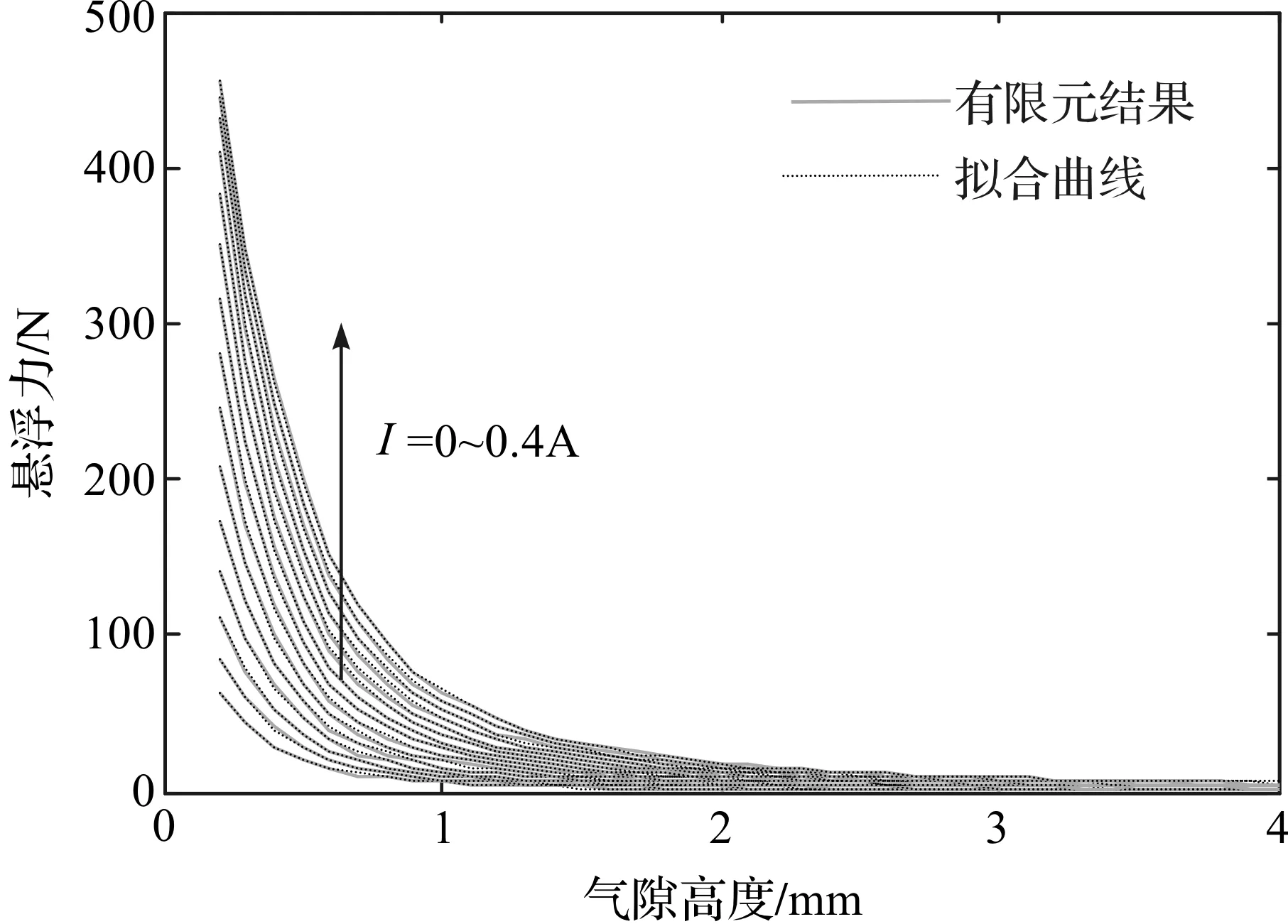
图9 悬浮力随电流和气隙高度变化
以曲线拟合结果为样本,将电磁铁电流、电磁铁气隙作为神经网络的输入,可分别利用如图10所示的三层前向网络对电磁铁悬浮力模型Fz(I,g)进行辨识。神经网络的输入层神经元2个,中间隐层神经元50个,输出层神经元1个,激励函数采用连续可导的tan-sigmoid函数,激发函数采用线性函数,训练初始权系数在0~1之间随机选取,学习率为0.08,在训练1812步后,达到满足误差指标所要求的精度10-5。

图10 BP神经网络结构图
为了验证BP神经网络模型的准确性,本文对比分析了学习样本以外的,气隙高度为1.5 mm时的神经网络模型计算结果与样机实验测量结果,结果如表3所示。从表3中可以看出,BP神经网络模型对磁悬浮力的计算结果准确,故推导得出的悬浮高度与实验结果吻合良好,误差均值仅约为3.42%。与解析模型计算结果相比,误差均值降低了12.64%,准确度大幅提升。

表3 不同电流下悬浮高度的计算和测量数据
3 结 论
本文针对一种可实现推力和悬浮力解耦的磁悬浮式工作平台进行了建模研究。研究中分别使用标量磁位法和等效磁路法对工作平台中的永磁直线电机和电磁铁部件进行了电磁场和电磁力分析,并分别进行了有限元仿真和实验验证。有限元和样机结果证实永磁直线电机的解析模型误差仅为0.1%,但电磁铁解析模型误差高达16.1%。
针对解析模型无法准确表征电磁铁非线性特征的问题,本文提出了一种基于BP神经网络的建模方法。该方法将曲线拟合引入BP神经网络建模,解决了以有限元结果为参照的小学习样本问题。实验结果表明:该方法可有效实现对非线性系统的建模,在保持有限元法计算精度的基础上,有效地提高了计算速度,适用于实时仿真和控制。
[1] KIM W, TRUMPER D, LANG J. Modeling and vector control of planar magnetic levitator[J]. IEEE Transactions on Industry Applications,1998,34(6):1254-1262.
[2] COMPTER J C. Electro-dynamic planar motor[J]. Precision Engineering,2004,28(2):171-180.
[3] 张新华,孙玉坤,项倩雯,等.一种动圈式磁悬浮次平面电机实时电流分配策略[J].中国电机工程学报,2013,33(6):144-152.
[4] JANSEN J W, SMEETS J P C, OVERBOOM T T, et al. Overview of analytical models for the design of linear and planar motors[J]. IEEE Transactions on Magnetics,2014,50(11):8206207.
[5] 寇宝泉,张鲁,邢丰,等.高性能永磁同步平面电机及其关键技术发展综述[J].中国电机工程学报,2013,33(9):79-87.
[6] GUOL ZHANG H, GALEA M, et al. Analysis and design of a magnetically levitated planar motor with novel multi-layer windings[J]. IEEE Transactions on Magnetics,2015,51(8):8106909.
[7] 张钊,郭亮.层叠绕组式磁悬浮永磁直流平面电机PID控制系统研究[J].浙江理工大学学报,2014,31(5):525-531.
[8] 郭亮,陈本永.精密磁悬浮工作平台的力特性分析[J].中国电机工程学报,2008,28(21):118-122.
[9] 赵凯华,陈熙谋.电磁学[M].北京:高等教育出版社,2011:281-283.
(责任编辑: 康 锋)
Research on Modeling of Electromagnetic Suspension High-Precision Working Platform
GUOLiang,ZHENGJunna
(Faculty of Mechanical Engineering & Automation, Zhejiang Sci-Tech University, Hangzhou 310018, China)
The modeling research was carried out for a electromagnetic suspension high-precise working platform with six degrees of freedom. The scalar magnetic potential method and equivalent magnetic circuit method were used to build the electromagnetic models of the linear motors and electromagnets respectively. And the accuracy of the models was verified by using two-dimensional finite element and experiment results of the prototype respectively. Then, a new BP neural network modeling method was proposed, for the equivalent magnetic circuit method could not accurately represent nonlinear electromagnetic property of electromagnet. The new method introduced curve fitting in the BP neural network technology to improve the learning accuracy under small sample. As proved by the experimental results, the error of the modeling method can decrease to about 3%. It can fully meet the accuracy requirement of the control systems of electromagnetic suspension high-precise working platform.
high-precision working platform; modeling method; FEA; analytical method; BP neural network
10.3969/j.issn.1673-3851.2017.01.012
2016-01-14
日期: 2016-12-09
浙江省自然科学基金项目(LY14E070008)
郭 亮(1979-),女,山东济宁人,副教授,主要从事电机设计和优化方面的研究。
TM153
A
1673- 3851 (2017) 01- 0071- 06
