水产养殖自动导航无人明轮船航向的多模自适应控制
2017-01-17洪剑青赵德安孙月平
洪剑青,赵德安,孙月平,张 军,罗 吉
(1. 江苏大学电气信息工程学院,镇江 212013;2. 镇江市高等专科学校机械系,镇江 212003)
水产养殖自动导航无人明轮船航向的多模自适应控制
洪剑青1,2,赵德安1※,孙月平1,张 军1,罗 吉1
(1. 江苏大学电气信息工程学院,镇江 212013;2. 镇江市高等专科学校机械系,镇江 212003)
为降低水产养殖行业劳动作业强度和人力成本,解决劳动力日益匮乏的问题、提高鱼塘投饵效率和投饵均匀度,对适用于水产养殖的水面作业艇-明轮船的航行控制进行研究。为克服明轮船运动过程中航速、航向强耦合,给出改进的明轮船控制系统方案,实现航向、航速之间的解耦,建立明轮船航向系统的动态响应数学模型。根据明轮船的工作特点,对明轮船进行多模自适应控制,用计算机软件进行仿真和实船试验,并与PD(proportion differentiation)控制进行比较。通过仿真和试验的结果,证明所设计的控制器能解除明轮船的耦合效应,船速超调量不超过5%,稳态误差在3%以内,直线航行时的航向误差在3°以内。数据表明多模自适应控制方法能够对明轮船航行进行较好的控制,效果优于PD控制。
水产养殖;自动控制;模型;明轮船;航向;自适应;多模
0 引 言
近几年,随着经济发展和人民生活水平的提高,丰富的水产品不仅大幅度改善了人民的生活,也使水产养殖业成为国民经济的支柱产业之一[1-2]。目前,水产养殖行业向集约化、自动化、信息化、智能化的方向发展,工业化水产养殖的趋势已经形成。国内主要的水产养殖基地,例如阳澄湖、长荡湖等重点养殖地区都对工业化水产养殖提出了迫切需求。由于国内的水产养殖通常位于近海或者内河水域,水浅、水下植被较多,水情较为复杂,开发和设计具有低速机动性好、吃水浅的水面作业平台是必然的选择。
明轮船依靠左右明轮驱动水体,产生船体运动所需的动力。明轮旋转时,水面之上的叶片做无用功,水面之下的叶片驱动水体产生推力,导致明轮的效率较低、明轮船速度较慢。在航运领域,明轮船得不到大面积的推广和应用。但是,在水产养殖行业,由于工作环境和任务需要,水面作业装备通常处于低速运动状态,无需高速运动。此时舵控方向的螺旋桨船舶不能有效控制其航向和航迹,螺旋桨容易被水生植物缠绕、搅断各类植物,造成水体污染、影响水质;螺旋桨也可能伤害水产养殖的动物。由此可见,螺旋桨推进船舶不适合水产养殖需求。
由于水产养殖行业的特殊性和明轮船固有特点,使它成为适用于水产养殖行业水面作业设备的良好载体。目前,关于有舵螺旋桨船舶控制的研究成果已经很多[3-4],但是涉及明轮船航行控制研究的成果比较少。国内已有成果主要集中于对明轮的推力、效率等方面的研究,对明轮船航行控制研究的相关文献较少[5-8]。由于明轮船自身结构特点,其航行控制与通常的螺旋桨船舶不同。螺旋桨推进的船舶依靠尾舵控制方向,推进和航向分属不同机构负责;明轮船的航行依靠左右明轮,推进和航向都由左右明轮协同控制,航向、航速存在较强的耦合效应。本文首先根据明轮船的特点提出明轮船改进的控制系统,然后根据文献[7]提出的船舶航向水动力模型,建立明轮船的航向动态响应模型。在改进控制系统基础上,提出对明轮船航向进行多模自适应控制,同时和传统的PD(proportion differentiation)控制进行比较;用Matlab软件对两种航向控制算法进行计算机仿真,并进行试验验证,最后得出相关结论,以期为改进明轮船控制系统与控制方法,提高明轮船航行的精度和稳定性提供参考。
1 材料与方法
1.1 自动导航明轮船
江苏大学和金湖小青青机电设备有限公司共同研制的明轮船的结构如图1所示。
为研究明轮船运动控制,如图1建立坐标系。原点位于明轮船的重心,x轴在明轮船的纵中剖面内,指向船艏;y轴与纵中剖面垂直,指向右舷,平行于水线面;z轴在纵中面内,垂直向上,与水线面垂直。

图1 明轮船结构和运动坐标系Fig.1 Architecture and motion coordinate system of paddlewheel vehicle
明轮船是双体艇,船长1400 mm,宽850 mm,明轮直径330 mm,明轮最高转速220 r/min,航速15~20 m/min。船体左右各一、结构对称、大小相同。船体、驱动电动机通过传动装置驱动明轮正转或反转。明轮船带有电控箱,内装左右电动机的驱动器和控制器。明轮船顶部安装有两个GPS天线,定位精度±1 cm,分别位于船艏和船尾,可以测得明轮船船艏和船尾位置。为提升抗横摇性能采用了双体结构。明轮船两侧增设了浮筒,进一步改善负载能力。明轮船电控箱内装有电池、ARM(advanced RISC machine)控制电路板、控制电路、惯导设备、手动遥控装置等。通过惯导设备测量明轮船的航向偏北角度和各个方向速度及加速度。这些信息均提供给控制器,并且通过串口通讯设备将采集的各种状态信息经通讯基站等设备向上位机、服务器发送或者向监控终端发送,控制器可以接受上位机等发送的各种指令。明轮船控制器在收到监控终端发送的目标点指令后,控制器根据当前位置与目标点及目标航速解算出左右明轮所需要的各自转速,然后驱动左右两个明轮旋转。
明轮船作业的水域通常河道狭窄,水草较多,水下环境复杂;在复杂环境中航行,常需要进行低速机动或原地大角度转向。因此,明轮船的航向控制显得尤其重要。明轮船通过左右两侧明轮旋转的转速差产生绕z轴的扭矩来改变航向。通过分析发现明轮船的航速、航向都是通过控制明轮旋转实现。因此,明轮船控制系统,如果不进行妥善处理,在转向时明轮船会发生失速,或者当航速变化时,明轮船的航向发生颤动、航迹漂移等现象。因此,明轮船控制系统的设计显得十分重要。
1.2 明轮船控制系统方案
文献[5]对明轮船的控制,采用速度环和航向环的控制方式。如图2所示。
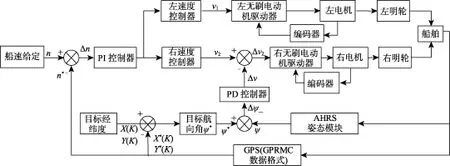
图2 已公开明轮船控制方案Fig.2 Paddlewheel vehicle control scheme that has been disclosed
文献[3]中首先通过闭环PI(proportion integration)航速控制给出左、右明轮的速度控制信号v1、v2。v1送给左无刷电动机驱动器控制左明轮电动机。通过航向闭环控制右明轮的调速信号ψΔ,右明轮的转速控制信号是转速控制信号v2和调速信号ψΔ的叠加结果Δv2送给右无刷电动机驱动器控制右明轮电动机。这种控制方案可以实现明轮船的航行,但是尚存在一些不足之处。若明轮船保持匀速航行,航速给定信号n不变。当航行中需要改变航向,左明轮转速受给定航速n与解算出的实际航速n*共同控制,左明轮转速转艏之初转速保持不变。明轮船转艏运动是依靠左右明轮的转差扭矩来实现,为达到目标航向,右明轮转速必然发生变化。这会导致明轮船所保持的航速随之改变。此类航速波动,浪费有限的蓄电池电能;且单明轮控制方向也使明轮船航向动态响应不快,对轨迹跟踪不利,且该航向控制方案无法实现原地360°转向,降低了部分明轮船低速高机动性的特点。
文献[6]给出了明轮船航迹跟踪的策略,其航向采用单变量模糊控制算法,明轮船航向动态响应较慢,对系统受到的干扰抑制能力很弱。由于信号采样周期限制,系统只能少量时间进行复杂运算,还需要足够的时间进行控制、信号处理等工作。文献[3]、[9]、[10]对航向全部采用模糊控制,使得系统运算负担很重。本文提出一种改进控制方案,可以克服上述的缺点。如图3所示。

图3 改进明轮船控制方案Fig.3 Improved control scheme of paddlewheel vehicle
该方案将明轮船的控制分成航向、航速两个部分。通过惯导设备测量当前航速vc,由服务器或监控终端发送的目标航速vd,两路信号经航速控制器给出航速控制信号vcz,经速度映射器将速度控制信号vcz转换成对应速度转速信号vn;惯导设备的电子罗经测量当前航向ψc,监控终端发送的目标航向ψd,这两路信号经航向角控制器生成转向角度δ,送转向角速度限幅控制器生成限幅转向角δx,经转向角映射器转换成左右明轮的转速差δn,送航向左右分配器。航向分配器将转速差生成左明轮转向转速Δnl,右明轮转向转速例如,若明轮船右转,Δnl为正;若明轮船左转Δnl为负。左右转向转速信号Δnl和Δnr与速度转速信号vn分别叠加,得到左明轮命令转速ncl与右明轮命令转速ncr。将ncl和ncr信号各自送至左、右明轮转速控制器控制左、右明轮电动机的转速,推动明轮船按照预定方式航行。
采用改进方案的控制器时,当明轮船需要改变航向的时候,通过左右明轮转速分别加减形成转向扭矩。一个明轮速度增减造成的推力变化会由另一个明轮转速的减增进行弥补,减少了由于转向造成的航速波动。
2 明轮船航向控制
为了研究、仿真验证明轮船的航向控制效果,需建立明轮船艏摇角动态响应仿真模型。航向响应模型以航速、左右明轮转速作为输入量,艏摇角和艏摇角速度作为输出量。响应模型与水动力模型相比显得更加简洁、清晰、直观反映出明轮船动态响应特性。
明轮船转向扭矩NT(N·m)由左右明轮转差实现。NT的计算方法如公式(1)。

式中b为明轮船宽度,m;1dT、2dT为左右单明轮的推力,N,具体计算见文献[8]。明轮船叶片工作时产生的推力垂直于y轴,所以明轮船叶片的横向推力沿y轴作用效果为零。根据图3改进的明轮船控制方案,扭矩TN由转向角δ(°)控制(δ作用类似舵角)。因此,有关系式(2)。

式中TNδ为明轮船对应转向角δ的水动力系数。
将明轮船的Yδ和TNδ带入文献[7]中的水动力表达式得到新的表达式(3)

式中Y为沿y轴方向的水动力;N为绕z轴的转矩;Yv˙、Yr˙、Yv、Yr、Nv˙、Nr˙、Nv、Nr均为水动力系数;v˙为横漂加速度,cm/s2;v为横漂速度,cm/s;r˙为转艏角加速度,(°)/s2;r角速度,(°)/s;δR为实际明轮船的转向角,(°)。
因此,明轮船航向水动力方程为

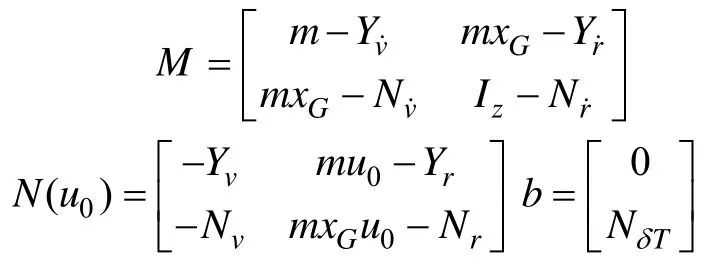
式中m为明轮船质量,kg;xG为明轮船重心坐标,m;u0为明轮船航行速度,m/s;Iz为明轮船质量对z的惯性矩,kg·m2。
根据文献[7] 并且结合明轮船工作环境及运动状态的特点,在忽略横漂速度v的基础上,由式(2)及(3)获得明轮船艏摇角速度和转向角传递函数H1(s)与H2(s)。
明轮船艏摇角速度和转向角的传递函数表达式为

艏摇角传递函数为
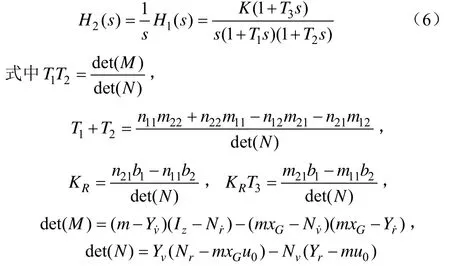
式中的mij、nij、bij的定义见式(4)。
明轮船的航向系统是非线性系统,很难建立精准的控制模型。如果采用普通控制方式,很难保证在各种情形下都能有较好的动态特性和跟踪特性。如果遇到随机波浪或者风力干扰,明轮船的航向就会发生较大的波动。若采用PD控制方式,明轮船航向控制系统的收敛时间比较长,易导致明轮船的航迹产生较大的偏差和震荡。直线航行和转向属于不同的工况,水动力系数不同,应该分别对待处理。多模自适应控制将明轮船的各工况分别处理和对待,针对各工况设计多个控制器,力求达到较好的控制效果的前提下,减轻系统运算量,具有一定自适应性的控制方式。这对明轮船非常适用,可以明显改善明轮船航行的动态性能。针对明轮船航向控制系统,设计多模控制如下。
1)首先根据明轮船工况,确定多个控制模型,建立模型集合。

式中Ω表示以Mi为元素的模型集合。
这个模型集合是以具有不同系数的模型(5)或(6)为元素建立,覆盖明轮船全部的工作状态。本文的明轮船共分两个工况,直线航行、转向。
明轮船的直线航行和转向操纵属不同运动状态,动力学特性不同,水动力系数不同,因此将直线和转向动作归为不同的模型分别处理。在直线航向和转向操纵过程中,航向角具有不同的偏差Δψ幅度 。按照航向角偏差Δψ的大小,将明轮船的工况分为以下几个区间。
当明轮船航向角偏差Δψ属于Δψ4、Δψ5区间时,明轮船做转向操作,控制器使明轮船以最大角速度转向并趋于目标航向,此时以最大转向扭矩驱动明轮船转向。当Δψ属于Δψ2、Δψ3区间时,采用模糊控制[11-16],可以获得较好的收敛速度和动态特性。当Δψ属于Δψ1时,明轮船工况属于维持航向和航迹修正,采用 P ID控制,可以减少运算量,同时便于消除航向角静差,减少航迹偏差。使用本文方法,可以使明轮船获得较好的动态特性和较快的收敛速度,并且明轮船在趋向目标航向过程中较平稳,误差尽可能小。
由于明轮船航向系统具有时变、非线性,工作环境变化较大、随机干扰较多,所以在Δψ2、Δψ3区域采用模糊控制算法。模糊控制主要依靠人们平时的操纵经验积累,以条件语句的方式控制对象的工作,具有一定的人工智能,能够对外界干扰进行适当的抑制,使明轮船航向角的控制获得较好的动态特性,有利于高精度航行的实现。明轮船航向角控制器的系统如图4所示。
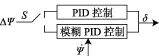
图4 明轮船航向角控制器结构图Fig.4 Paddlewheel vehicles heading controller structure diagram
航向角控制器由PID控制器和模糊PID控制器两部分并联组成,智能切换开关S根据航向角偏差Δψ的大小自动选择PID控制器或者模糊PID控制器进行工作。
设计明轮船航向角的模糊PID控制器如下所述[8,10,17-19]。根据明轮船的工作情形,模糊控制器的设计分三个部分:模糊输入,模糊推理规则设计,模糊输出。明轮船航向模糊控制器的输入是以航向角偏差Δψ和航向角偏差变化率Δ作为模糊控制器推理输入量E和EC,按照Δψ的范围[-50,50],将E论域分为{NBE,NME,NLE,NZE,PZE,PLE,PME,PBE}共8个等级,根据Δ的范围[-6,6]将EC的论域分为{NBE,NME,NLE,NZE,PZE,PLE,PME,PBE}也是8个等级。然后根据模糊输入量建立隶属度函数。本文采用了三角系非均匀隶属函数。航向角偏差Δψ和航向角偏差变化率Δ送入模糊控制器,经过推理、计算输出模糊PID控制器的运算结果:Kp、KI、KD参数,使明轮船航向控制器能根据模糊输入量Δψ和Δ的变化自动调整制Kp、KI、KD参数的输出,获得较好的动态特性。根据明轮船控制需要的Kp、KI、KD参数范围,设定模糊输出量的论域范围Kp=[0,2],KI=[0,0.006],KD=[0,1]。根据经验,Kp的论域分为4档,分别是[Kp1,Kp2,Kp3,Kp4],覆盖全部Kp范围,采用三角形隶属函数。同理,KD、KI论域也分4档分别是[KD1,KD2,KD3,KD4]和[KI1,KI2,KI3,K4],各自覆盖KD、KI范围。
为了实现模糊PID的自适应调节,必须建立模糊推理规则,这是模糊控制的核心。模糊推理规则的获取可以采用人类的经验法、系统测试的方法等。模糊控制规则的表达有语言推理、表格法、公示法等。根据明轮船航向控制的需要,设计控制法则如表1所示。
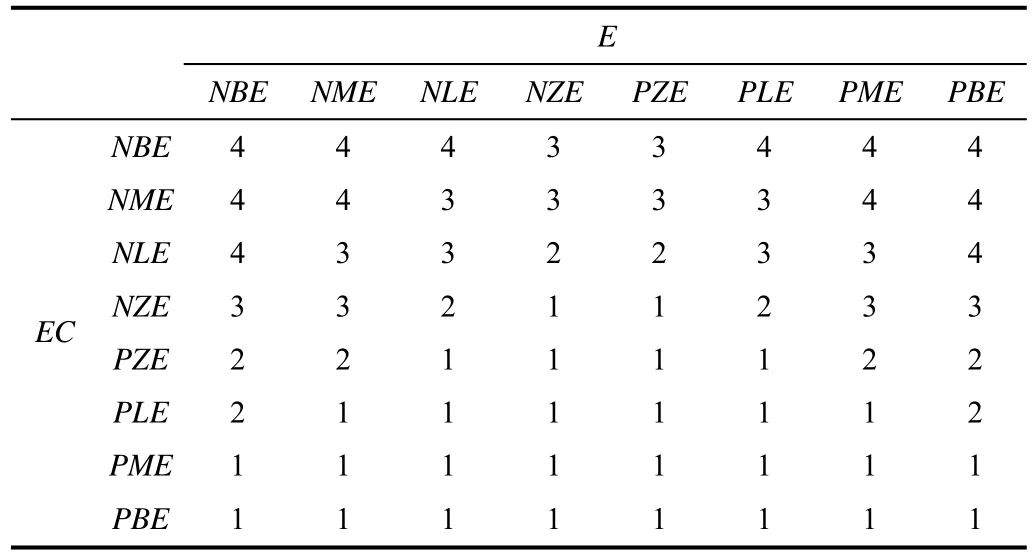
表1 模糊控制法则Table 1 Fuzzy rule of KP,KDand KI
由于明轮船航向系统的特殊性,传统方法是采用PD(proportion differentiation)控制方式生成转向角δ,可以实现对明轮船航向的镇定。PD控制采用增量式。详细公式如式(8)。

式中Δψ(k)为k时刻目标航向和当前航向之差;Δψ(k-1)为k-1时刻目标航向和当前航向之差;Kp、Kd分别为PD控制器的比例、微分系数。
3 明轮船航向控制仿真及试验
为了验证明轮船多模自适应控制方法的控制效果,进行了仿真和试验,并与PD控制方式进行了对比。首先,根据明轮船的试验艇参数,建立明轮船航向水动力方程[7]和明轮船航向响应模型(式(5)、(6))。
按照本文提出的控制系统方案,建立Matlab仿真控制模型,并且将控制信号输出给明轮船航向响应模型,观察动态响应结果。得到如图5的动态响应曲线。
通过图5仿真曲线,可以看出,当仿真给出30°转向角的阶跃信号的时候,PD控制和多模自适应控制均能实现明轮船航向角的控制和镇定作用。PD控制的超调量较大,经过多次震荡后趋于收敛,收敛时间较长。而多模自适应的超调量较小,在趋于收敛的过程中,震荡次数较少,震荡幅度较小,收敛速度快于PD(proportion differentiation)控制,明轮船的艏摇角动态响应速度比PD控制提高了25%。
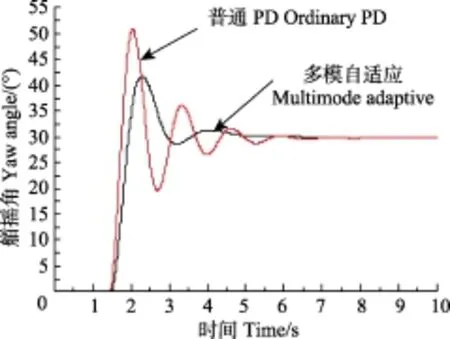
图5 两种控制方法仿真效果对比Fig.5 Two control methods simulation results comparison
两种控制方法分别进行了试验。2015年9月21日进行PD控制试验,天气为多云,风力小于5级,温度20~27 ℃。2015年12月15日进行多模自适应水面试验。试验当天,天气为多云,风力3~4级,阵风4~5级,温度0~10 ℃。为贴近明轮船的实际工作需求,设置大角度转向试验。两次试验都是实现75°的大转向角。明轮船航速35 cm/s。试验之后,根据监控终端收到的数据进行分析,得到如下的航向控制试验效果图6。
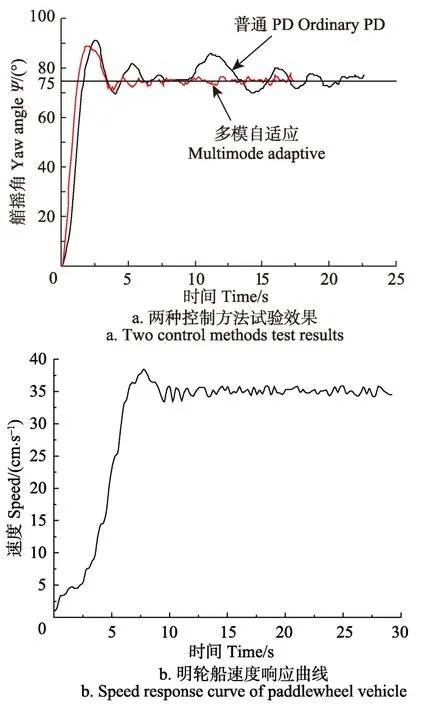
图6 试验效果对比Fig.6 Comparison of test results
从转艏试验效果图6a看,PD控制和多模自适应控制都能控制明轮船航向,但是两种控制方法有各自不同的特点。PD航向角控制的效果较差,从0°转艏至目标值大约需2 s,且在趋向目标值过程中艏摇角发生震荡,但是最终稳定趋向目标值。在趋向目标值过程中发生较大偏差是由于阵风影响。多模自适应控制控制方法的效果明显优于PD控制。在采用多模自适应控制方法的试验结果中,艏摇角 2 次超调、震荡之后,明轮船的航向已经稳定,震荡次数明显少于PD控制;超调量、艏摇角的稳态误差均小于PD控制,最大稳态误差不超过3°,动态误差比PD控制减少了35%以上。进一步分析试验响应时间结果,明轮船艏摇角动态响应速度比PD控制提高了25%。此外,通过试验也发现,明轮船在转艏过程中,由于对左右明轮驱动电动机均设有限幅措施、电动机自身功率有限及机械系统惯性、滞后等因素的影响,艏摇角的最大超调量虽有一定程度改善,但是减少不显著 。
图6b显示明轮船航速控制效果。由于采用了改进控制方案,航向的波动对航速影响不大。设置了目标航速35 cm/s,最大超调小于5%,稳态误差低于3%。
4 结 论
本文分析了明轮船的运动特点,根据明轮船特点,在Fossen理论的基础上,建立适用于明轮船的航向动态响应模型。在分析现有方案缺陷基础之上给出明轮船控制系统的改进设计方案,并据此设计了明轮船控制器。在前述基础上针对明轮船的航向进行了多模自适应控制,并与PD控制进行对比仿真、试验。
仿真与试验结果表明,采用改进控制器和控制算法,实现了较好的航向动态特性,震荡次数显著减少;明轮船的艏摇角动态响应速度比PD控制提高了25%;在直线航行过程中,航向稳定性更好,多模自适应控制航向角动态误差比PD控制减少了35%以上。综上所述,改进控制器能实现对明轮船航向、航速的解耦控制。多模自适应控制实现明轮船转艏运动的控制,效果优于PD控制效果。
[1] 孙月平,赵德安,洪剑青,等. 河蟹养殖船载自动均匀投饵系统设计及效果试验[J]. 农业工程学报,2015,31(11):31-39. Sun Yueping,Zhao Dean,Hong Jianqing,et al. Design of automatic and uniform feeding system carried by workboat and effect test for raising river crab[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(11):31-39.(in Chinese with English abstract)
[2] 孟祥宝,黄家怿,谢秋波,等. 基于自动巡航无人驾驶船的水产养殖在线监控技术[J]. 农业机械学报,2015,46(3):276-281. Meng Xiangbao,Huang Jiayi,Xie Qiubo,et al. Online monitoring equipment for aquaculture based on unmanned automatic cruise boat[J]. Transactions of the Chinese Society for Agricultural Machinery,2015,46(3):276-281.(in Chinese with English abstract)
[3] 吴限,高双,朱齐丹,等. 船舶航向控制系统的反步滑模设计[J]. 控制工程,2009(增刊1):51-55. Wu Xian,Gao Shuang,Zhu Qidan,et al. Design of ship course control system based on backstepping sliding mode[J]. Control Engineering of China,2009(Suppl 1):51-55.(in Chinese with English abstract)
[4] 张光发,张亚,姚杰,等. 渔船安全技术评价系统的开发与应用[J]. 农业工程学报,2013,29(17):137-144. Zhang Guangfa,Zhang Ya,Yao Jie,et al. Development and implementation of safety evaluation system for fishing vessels[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2013,29(17):137-144.(in Chinese with English abstract)
[5] 刘会贵,赵德安,孙月平,等. 水草全自动清理船控制系统[J].农业机械学报,2014,45(增刊1):281-286. Liu Huigui,Zhao Dean,Sun Yueping,et al. Control system for automatic aquatic plant cleaning ship[J]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(Suppl 1):281-286.(in Chinese with English abstract)
[6] 赵德安,罗吉,孙月平,等. 河蟹养殖自动作业船导航控制系统设计与测试[J]. 农业工程学报,2016,32(11):181-188. Zhao Dean,Luo Ji,Sun Yueping,et al. Design and experiment of navigation control system of automatic operation boat in river crab culture [J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2016,32(11):181-188.(in Chinese with English abstract)
[7] Fossen TI. Guidance and Control of Ocean Vehicles[M]. Trondheim,Norway:John Wiley and Sons,Inc,1994.
[8] 洪剑青,赵德安,孙月平,等. 水产养殖无人导航明轮船运动仿真与试验[J]. 农业机械学报,2016,47(3):124-130. Hong Jianqing,Zhao Dean,Sun Yueping,et al. Motion simulation and test of aquaculture unmanned navigation paddlewheel vehicle[J]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(3):124-130.(in Chinese with English abstract)
[9] 辛喆,李亚平,张云龙,等. 柴油机高压共轨系统轨压模糊控制与试验[J]. 农业工程学报,2016,32(增刊1):34-41. Xin Zhe,Li Yaping,Zhang Yunlong,et al.Fuzzy control and experiment of rail pressure for high-pressure common rail system of diesel engine[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2016,32(Suppl 1):34-41.(in Chinese with English abstract)
[10] 梅强,李丽娜,陈国权,等. 模糊自整定PID航向控制算法优化及其性能评判[J]. 合肥工业大学学报:自然科学版,2015,38(8):1055-1059. Mei Qiang,Li Lina,Chen Guo-quan,et al. Optimization of fuzzy-tuning PID heading control algorithm and its performance evaluation[J]. Journal of Hefei University of Technology:Natural Science,2015,38(8):1055-1059.(in Chinese with English abstract)
[11] 陈进,宁小波,李耀明,等. 联合收获机前进速度的模型参考模糊自适应控制系统[J]. 农业机械学报,2014,45(10):87-91 Chen Jin,Ning Xiaobo,Li Yaoming,et al. Fuzzy adaptive control system of forward speed for combine harvester based on model reference[J]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(10):87-91.(in Chinese with English abstract)
[12] 李明生,赵建军,朱忠祥,等. 拖拉机电液悬挂系统模糊PID自适应控制方法[J]. 农业机械学报,2013,44(增刊2):295-300. Li Mingsheng,Zhao Jianjun,Zhu Zhongxiang,et al. Fuzzy-pID self-adaptive control method in electro-hydraulic hitch system[J]. Transactions of the Chinese Society for Agricultural Machinery,2013,44(Suppl 2):295-300.(in Chinese with English abstract)
[13] 洪添胜,张泰岭,罗锡文,等. 步行船式车辆行走稳定性的比较研究[J]. 农业工程学报,1999,15(1):63-68. Hong Tiansheng,Zhang Tailing,Luo Xiwen,et al. A comparative study on running stability of walking boat vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),1999,15(1):63-68.(in Chinese with English abstract)
[14] 贺付亮,李新科,许愿,等. 基于物联网的内河小型渔船动态信息监控系统设计[J]. 农业工程学报,2015,31(20):178-185. He Fuliang,Li Xinke,Xu Yuan,et al. Design of dynamic information monitoring system for small-sized fishing vessels on inland waterway based on internet of things[J]. Transactions of the Chinese Society of AgriculturalEngineering(Transactions of the CSAE),2015,31(20):178-185.(in Chinese with English abstract)
[15] 蒋蘋,胡文武,罗亚辉,等. 机滚船遥控驾驶系统设计[J].农业工程学报,2009,25(6):120-124. Jiang Ping,Hu Wenwu,Luo Yahui,et al. Design of the remote control driving system for rolling boat[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2009,25(6):120-124.(in Chinese with English abstract)
[16] 何祖军. 船舶航向的自适应神经模糊控制系统[J]. 船舶工程,2008,30(6):46-49. He Zujun. Ship’s course steering controller based on adaptive neural-fuzzy inference system[J]. Ship Engineering,2008,30(6):46-49.(in Chinese with English abstract)
[17] 张京,陈度,王书茂,等. 农机INS/GNSS组合导航系统航向信息融合方法[J]. 农业机械学报,2015,46(增刊1):1-7. Zhang Jing,Chen Du,Wang Shumao,et al. Research of INS/GNSS heading information fusion method for agricultural machinery automatic navigation system[J]. Transactions of the Chinese Society for Agricultural Machinery,2015,46(Suppl 1):1-7.(in Chinese with English abstract)
[18] 丁永前,王致情,林相泽,等. 自主跟随车辆航向控制系统[J]. 农业机械学报,2015,46(1):8-13. Ding Yongqian,Wang Zhiqing,Lin Xiangze,et al. Heading control system of autonomous following vehicle[J]. Transactions of the Chinese Society for Agricultural Machinery,2015,46(1):8-13.(in Chinese with English abstract)
[19] 徐博,陈立平,谭彧,等. 基于无人机航向的不规则区域作业航线规划算法与验证[J]. 农业工程学报,2015,31(23):173-178. Xu Bo,Chen Liping,Tan Yu,et al. Route planning algorithm and verification based on UAV operation path angle in irregular area[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2015,31(23):173-178.(in Chinese with English abstract)
[20] 徐立,方军庭,王国刚. 大型远洋风帆助航船舶航向控制系统仿真[J]. 中国航海,2014,37(4):96-99. Xu li,Fang Junting,Wang Guogang. Simulation of heading control system for large ocean-going sail- assisted Ships[J]. Navigation of China,2014,37(4):96-99.(in Chinese with English abstract)
Multi model adaptive control of paddlewheel vehicle's course in aquaculture
Hong Jianqing1,2,Zhao Dean1※,Sun Yueping1,Zhang Jun1,Luo Ji1
(1. School of Electrical and Information Engineering,Jiangsu University,Zhenjiang 212013,China;2. Department of Mechanical Engineering,Zhenjiang College,Zhenjiang 212003,China)
In order to improve production efficiency,reduce production cost,cope with the growing labor shortage,and improve the uniformity of feeding,the use of smart equipment is an inevitable trend. Due to the limitations of the industry property,the work of aquaculture industry is simple,tedious,and heavy. Using smart equipment substituted for human,it is the most suitable and competitive. In order to carry equipment on water surface and to move,it needs mobile operating platform. Paddlewheel vehicle is in line with the requirements. This paper studied the sailing control of paddlewheel vehicle. The paddlewheel vehicle could go on forward,which relied on both sides of the wheel propulsion device - paddlewheel. Due to the inherent characteristics of the paddlewheel vehicle structure,there was a strong coupling between the speed and the heading. It could cause speed fluctuations in the movement of the steering process. To achieve the designed speed and heading,both sides of the paddlewheel rotating speed will fluctuate dramatically. This situation reduced sailing stability of paddlewheel vehicle,wasted limited energy,shortened total route mileage,and influenced the operation of carrying device on the ship. To overcome this problem,the control system was analyzed and pointed out the defects,and then the improved paddlewheel vehicle control system was given,which had the advantage of decoupling effect between the heading and the speed of paddlewheel vehicle. The improved control system was important to make paddlewheel vehicle have better sailing stability. After that,according to the Fossen theory,the heading system dynamic response model was acquired from the hydrodynamic equations of paddlewheel vehicle. Next,on the base of analyzing work situations of paddlewheel vehicle,the paper proposed the method of multi-mode adaptive control. It treated the paddlewheel vehicle’s sailing straight and steering movements with different methods. In order to improve the dynamic response effect and anti-jamming capability of paddle vehicle,the fuzzy logics control heading system was used for paddlewheel vehicle. In order to verify the validity of the controller and control algorithms,the dynamic response model was constructed using the MATLAB software. Then,the simulation was conducted by using computer with the designed algorithms of the multi-mode adaptive control. At the same time,the simulation of PD(proportion differentiation) control was carried out for comparing. Then,the experiment was carried out on water surface in outdoors. GPS(global position system) and inertial navigation equipment were installed on paddlewheel vehicle,and they were used to measure and collect the data of real-time tracking and heading angle,which were transmitted to the host computer and recorded through serial communication device. By comparing the simulation and experimental results,it was found that using multi-mode adaptive control could effectively control the paddlewheel vehicle’s stability on the basis of the improved control system solutions. Results showed that the speed overshoot was no more than 5%,the steady-state error within 3%,and the heading error within 3° when straight sailing. Both methods of multi-mode adaptive control and PD control were carried out on the paddlewheel vehicle heading. Computer simulation and experiments were used to test and compare control effect. The results of simulation and experiment prove that the designed controller can achieve the decoupling,and the multi-mode adaptive control method can control the paddlewheel vehicle course,which is better than the PD control.
aquaculture;automatic control;models;paddlewheel vehicle;heading;adaptive;multi-mode
10.11975/j.issn.1002-6819.2017.01.013
洪剑青,赵德安,孙月平,张 军,罗 吉. 水产养殖自动导航无人明轮船航向的多模自适应控制[J]. 农业工程学报,2017,33(1):95-101.
10.11975/j.issn.1002-6819.2017.01.013 http://www.tcsae.org
Hong Jianqing,Zhao Dean,Sun Yueping,Zhang Jun,Luo Ji. Multi model adaptive control of paddlewheel vehicle's course in aquaculture[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE),2017,33(1):95-101.(in Chinese with English abstract)doi:10.11975/j.issn.1002-6819.2017.01.013 http://www.tcsae.org
2016-04-28
2016-10-30
江苏省“十二五”农业支撑项目“水产生态健康设施养殖信息管理技术系统研发”(BE2013402);江苏高校优势学科建设工程项目(PAPD,No.6-2011);江苏省高校研究生科研创新计划项目(CXLX12_0661);镇江市重点研发(现代农业)计划项目“多功能全自动水产养殖作业船的研制与应用”(NY2015022)
洪剑青,男(蒙),江苏镇江人,博士生,副教授,主要从事农业电气化与自动化装置研究。镇江江苏大学电气信息工程学院,212013。Email:hongjianqing@163.com
※通信作者:赵德安,教授,博士生导师,主要从事农业电气化与自动化技术研究。镇江江苏大学电气信息工程学院,212013。Email:dazhao@ujs.edu.cn
