基于三维激光雷达的车辆目标检测方法
2017-01-17苏致远徐友春李永乐
苏致远,徐友春,李永乐
(1.军事交通学院 研究生管理大队,天津 300161; 2.军事交通学院 军用车辆系,天津 300161)
● 车辆工程 Vehicle Engineering
基于三维激光雷达的车辆目标检测方法
苏致远1,徐友春2,李永乐2
(1.军事交通学院 研究生管理大队,天津 300161; 2.军事交通学院 军用车辆系,天津 300161)
为有效检测道路中的障碍物,识别其中的车辆目标,提出一种基于三维激光雷达的障碍物检测和车辆识别方法。采用雷达相邻扫描点的距离特征分割地面,利用DBSCAN聚类方法对障碍物聚类,利用IEPF算法分割和拟合障碍物轮廓曲线,最后结合多个判据实现车辆目标检测。在城市快速路进行实验,结果表明该方法可以有效识别其中的车辆目标。
智能车;三维激光雷达;障碍物聚类;IEPF算法;车辆检测
障碍物检测是智能车环境感知技术的重要组成部分。按照检测方法,可以分为基于立体视觉的障碍物检测、基于激光雷达的障碍物检测、基于彩色机器视觉的障碍物检测以及基于毫米波或超声波雷达的障碍物检测等[1]。由于激光雷达具有较好的环境适应性和较高的检测精度,本文主要基于三维激光雷达检测障碍物、识别车辆目标。
国内外相关学者对此做出了较多研究。Moosmann等[2]采用局部凹凸性准则对三维激光雷达数据进行地面和障碍物分割,实验证明在复杂的环境中也能获得较好的效果,但实时性较差。B. Douillard等[3]通过均值高度图进行地面分割,然后采用最大最小值栅格图对障碍物进行再分割,利用这种混合高度图能够较好地提取地面、障碍物信息,但这种方法对雷达的外部标定要求很高,在车辆姿态发生剧烈变化时易受干扰。Azim等[4]对三维激光雷达数据进行分割,用矩形块表示障碍物,利用长高比、宽高比特征来分类车辆和行人,可以达到实时检测,但是不能解决遮挡的问题。文献[5]通过提取目标的直线和直角特征来识别车辆目标,从而克服了目标形状变化对识别结果的干扰。也有的研究利用激光的反射强度检测障碍,可以排除外观相近障碍物的干扰。
本文首先根据三维激光雷达的数据结构对点云数据进行校正,然后基于点云距离特征进行前景和背景分离,利用DBSCAN算法对道路区域内的障碍物聚类,最后通过IEPF算法对障碍物轮廓进行分割和拟合,从障碍物中判别出车辆目标。
1 数据预处理
本文数据源于HDL-64ES2三维激光雷达,该雷达垂直扫描角度为-24.8°~+2°,在垂直扫描范围内分布有64个不同角度的激光发射器,在水平方向上雷达通过旋转得到360°环境信息。以10 Hz的采样频率,每帧约采集13万个点。
HDL-64ES2三维激光雷达通过旋转获取环境数据,数据本身具有先后顺序和组织结构。但是由于激光雷达的安装、标定等原因,同一扫描角度上的点在地面的投影并不严格地落在一条通过旋转中心的直线上,本文对此进行校正,使得地面投影角度和原始数据扫描角度达到统一。每帧的扫描数据构成三维矩阵Iv,可表示为
(1)
式中:
P(b,j)=[xyzip]
(2)
Iv的每一列表示某个旋转角度的64组数据,每一行表示雷达旋转一周单个激光采集到的若干组数据。n为每帧的采样次数;b为光线编号,根据扫描角度由负到正从0至63取值;j为从起始位置开始的采集次数;P(b,j)为点的属性,包含点的三维坐标(x,y,z)、强度信息i和聚类属性p。
2 车辆目标检测
2.1 路面分割
由HDL-64ES2三维激光雷达的检测特性,在地面投影中点云密度由中心向四周逐渐降低,在障碍物处点云密度增加,因此可以根据密度变化特征将障碍物从环境中分离出来。在理想水平面上,雷达每个扫描点至雷达旋转轴的距离是确定的,若遇到凸障碍,激光无法穿过障碍物,导致扫描点到雷达旋转轴的距离小于其理论距离;若遇到凹障碍,实际扫描距离将大于理论距离。根据雷达安装位置可以得到各扫描线的理论扫描距离及相邻扫描角度的距离差,由实时雷达数据可以计算实际扫描距离和实际相邻扫描线距离差,通过理论值与实际值的对比可以对点云的属性进行判定,实现路面与障碍物的分离。根据以上判据对点云进行分割,效果如图1所示。
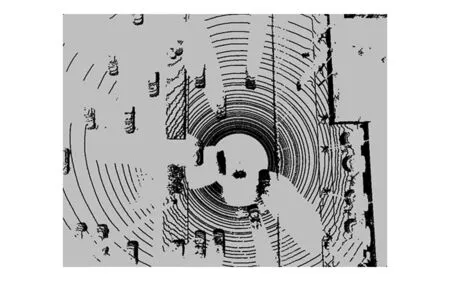
(a)原始点云
(b)分割后点云图1 原始点云和分割后点云对比
比较图1中的原始点云与分割后的点云,图1(a)中原始点云呈现出由内到外逐渐稀疏的特点,并包含车辆、道路、道路边界、树木、围墙等元素;经过以上基于点云密度的分割处理后,道路及地面被分割出去,车辆、树木、围墙和部分道路边界被保留下来。由此可见,通过以上路面分割过程,成功达到了减少点云规模并保留有效特征的效果。
2.2 障碍物聚类
对任意的点集,聚类算法主要有基于网格的方法、划分方法、层次聚类、密度聚类和模型聚类等,此外还可以将点云投影后的图像二值化,利用图像的方法聚类[6]。本文的感兴趣区域是路面,所以只对路面内的障碍物进行聚类,道路边界通过其他的方法求得。由于已经将障碍物与路面分割开,点云密度特征明显,所以本文采用基于密度的聚类方法进行聚类。
具有噪声的基于密度的聚类(density-based spatial clustering of applications with noise,DBSCAN)方法是一种基于密度的空间聚类算法。该算法将具有足够密度的区域划分为簇,并在具有噪声的空间数据中发现任意形状的簇,它将簇定义为密度相连的点的最大集合[7]。
算法的基本思想是扫描整个数据集,找到任意一个核心点(即在一定范围内周围点的数量大于阈值的点),而后向周围扩展所有密度可达的点。重复以上过程,直至所有的点都被聚类或被判定为异常点。该算法的优点是可以聚类所有形状的点集,可以在必要时输入过滤噪声的参数,与K-mean算法相比,不需要输入要划分的聚类个数。
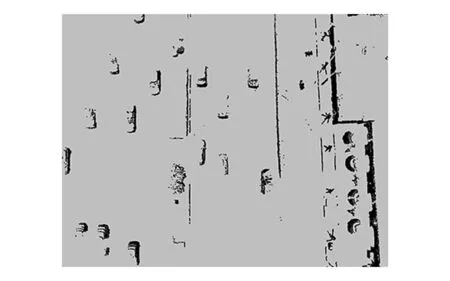
图2所示为算法对两个点集的聚类结果,矩形框表示聚类对象的最小包围矩形。由于点云处于三维空间,所以在图中视角有部分点云在矩形框外。除了最小包围矩形,也可以采用“盒子”模型对点云进行三维包络。
2.3 车辆目标检测
2.3.1 特征提取
当检测的障碍物为车辆时,其轮廓特征一般为直线或近似呈“L”的双折线,或者为“U”型的三段折线。因此,本文取聚类点集的轮廓特征作为障碍物类别的主要判定条件。
由于本文基于雷达返回的距离信息分割路面和障碍物,并对障碍物点云进行聚类,所以提取障碍物边界时可以直接将各角度最近的障碍物点提取出来表示障碍物边界。图3所示为障碍物轮廓提取结果,当外界车辆相对于本车有一定夹角时,车辆轮廓特征为“L”或“U”形,只有在本车正前、后方或侧面齐头并进时才有可能为直线段。

图3 障碍物边界特征提取
2.3.2 特征判定与车辆识别
在图像处理领域,对车辆目标进行识别通常使用模板匹配的方法,通过计算目标与模板的相似度判断目标是否为模板对象。本文处理的对象为三维点云不适合直接使用该方法,所以本文采用迭代终点拟合(interative end point fitting,IEPF)算法[8-9]对聚类结果的边界特征进行拟合,并结合障碍物尺寸信息进行车辆目标判定。
IEPF算法分为两步,首先将聚类对象分割成几个部分,而后对每个部分分别进行拟合[9]。
(1)线型判定。假设一个聚类对象内部点集为P=(p1,p2,…,pn),将该点集的首尾用直线连接起来,计算点集内每个点到直线的距离di,并找到最大距离,判断该距离是否大于设定阈值Dthr。若大于阈值Dthr,则在该点处将此聚类点集分为两个子集P′={p1,p2,…,pn}、P″={p1,p2,…,pn},然后继续对子集重复以上判定过程,直至集合内的点都小于阈值,完成分割。
(2)直线拟合。利用IEPF算法分割聚类点集后,利用最小二乘法(GLS)或随机采样一致性(RANSAC)方法拟合直线,得出车辆形状。
特征向量用于表征聚类对象的属性,应包含聚类对象的位置、形状、大小等信息,所以定义特征向量为Vi=[x,y,h,n,p,s]。其中:x,y为目标位置;h为同一聚类对象内点集的最大高度;n为目标轮廓的线段数量,取值一般为1、2或3;p为目标形状,直线型目标两条线段间的夹角为0°,“L”型目标的线段夹角约为90°,也会有呈“U”型的目标,三段线之间的夹角各约为90°;s为目标的大小,指外接矩形的长和宽。目标形状如图4所示。

图4 车辆的3种特征形态
在拟合车辆轮廓时,分别利用随机采样一致性算法和最小二乘法分段拟合障碍物轮廓,图5所示为某次拟合的效果图,为更好地表示分段直线间的夹角,将拟合线段平移至矩形中心。图5(a)(b)为车辆前方的障碍物,分别使用随机采样一致性算法和最小二乘法拟合该点集,图5(a)中拟合的线段更符合车辆外形特点。图5(c)(d)分别为两种算法拟合的折线,图5(c)中随机采样一致性算法的拟合结果更符合车辆轮廓。通过以上比较,说明在有噪声干扰时,随机采样一致性算法相比最小二乘法能够更好地拟合目标点集。

(a)RANSAC拟合直线 (b)GLS拟合直线

(c)RANSAC拟合折线 (d)GLS拟合折线图5 随机采样一致性算法和最小二乘法比较
经过路面分割、障碍物聚类、障碍物轮廓特征提取与判定,得到表示障碍物的特征向量,根据特征向量,按照一定次序融合多个特征对车辆目标进行判断,算法流程如图6所示。

图6 车辆目标判断流程
3 实验结果
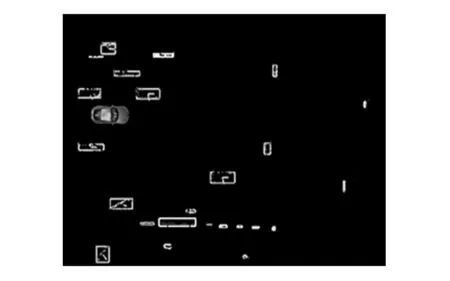
为测试本文算法,在城市快速路进行实验。图7所示为城市快速路一处典型的测试场景,经统计共聚类各种目标8个,经过车辆尺寸判断,符合车辆尺寸的目标7个,IEPF算法判断车辆数为7辆。实际场景中含车辆7辆,算法判断结果与实际结果相同。

图7 实验场景一
图8所示为另一处测试场景,场景比较复杂,图8(a)显示原始场景,图8(b)表示检测结果。共聚类各类目标24个,符合车辆尺寸的目标11个,IEPF算法判断符合车辆外形判据的目标为9个,实际场景中车辆目标有10个。漏检的原因是目标车辆太远,导致该聚类目标点云稀疏,聚类后的尺寸不符合车辆尺寸判据而被剔除。这表明本文算法可以有效地判断道路内的车辆目标。

(a)原始场景
(b)车辆目标检测结果图8 实验场景二
4 结 语
本文提出一种利用轮廓特征判定三维点云中车辆目标的方法,主要特点是利用点云密度特征进行路面分割,利用DBSCAN算法聚类,通过IEPF算法拟合障碍物轮廓并判定车辆目标。利用该方法可以有效检测道路边界内的车辆目标,但也存在类似车辆目标的误检测问题,下一步将利用传感器融合的方法解决。
[1] 王荣本,赵一兵,李琳辉,等.智能车辆的障碍物检测研究方法综述[J].公路交通科技,2007,23(11):109-124.
[2] MOOSMANN F, PINK O, STILLER C. Segmentation of 3D lidar data in non-flat urban environment using a local convexity criterion[C]//Intelligent Vehicles Symposium (IV), Xi’an: IEEE, 2009: 21-220.
[3] DOUILLARD B, UNDERWOOD J, MELKUMYAN N, et al. Hybrid elevation map: 3D surface models for segmentation[C]// Intellignet Robots and Systems (IROS),Taipei:IEEE,2010:1532-1538.
[4] AZIM A, AYCARD O. Detection, classification and tracking of moving objects in a 3D environment[C]//Intelligent Vehicles Symposium (IV), Madrid:IEEE, 2012: 802-807.
[5] 甘志梅,王春香,杨明.基于激光雷达的车辆跟踪与识别算法[J].上海交通大学学报,2009, 43(6): 923-926.
[6] 王肖,王建强,李克强,等.智能车辆3D点云快速分割方法[J].清华大学学报(自然科学版), 2014, 54(11):1440-1446.
[7] 毛国君,段立娟,王实,等.数据挖掘原理与算法[M].北京:清华大学出版社,2005:184-187.
[8] RAMER U. An iterative procedure for the polygonal approximation of plane curves[J]. Computer Graphics and Image Processing,1972,1(3):244-256.
[9] 周俊静.基于激光雷达的智能车辆目标识别与跟踪关键技术研究[D].北京:北京工业大学,2014:23-26.
(编辑:张峰)
Vehicle Targets Detection Method Based on 3D Lidar
SU Zhiyuan1, XU Youchun2, LI Yongle2
(1.Postgraduate Training Brigade, Military Transportation University, Tianjin 300161, China;2.Military Vehicle Department, Military Transportation University, Tianjin 300161, China)
To effectively detect obstacles in road and identify vehicle targets from those obstacles, the paper puts forward a method detecting obstacles and vehicle based on 3D lidar. Firstly, it divides ground with neighbor scanning point of lidar and gathers obstacles with DBSCAN clustering method. Then, it divides and fits profile curve of obstacles with IEPF algorithm. Finally, it realizes vehicle targets detection with multiple criterions. The experiment on urban expressway shows that this method can effectively identify the vehicle targets.
intelligent vehicle; 3D lidar; obstacles clustering; IEPF algorithm; vehicle detection
2016-07-13;
2016-09-26.
国家自然科学基金项目(91220301);广州市科技计划项目(2014Y2-00013).
苏致远(1992—),男,硕士研究生; 徐友春(1972—),男,博士,教授,博士研究生导师.
10.16807/j.cnki.12-1372/e.2017.01.011
TP273
A
1674-2192(2017)01- 0045- 05
