基于水压的水下传感网络的选播路由协议*
2017-01-12刘文博
刘文博,王 涛
(西北民族大学电气工程学院,兰州730124)
基于水压的水下传感网络的选播路由协议*
刘文博*,王 涛
(西北民族大学电气工程学院,兰州730124)
在水下传感网络中,由于传感节点的移动以及节点带宽和能量受限,设计从移动节点至声纳浮标的有效选播路由协议存在挑战。为此,提出一种基于水压的水下传感网络的选播路由HPAR(Hydraulic-Pressure-based Anycast Routing)协议。HPAR协议通过水压决策路由,并依据数据包权重,择优选择下一跳转发节点。当传感节点需要传输数据包时,HPAR协议就利用数据包优先权值ADV(ADVancement)构建候选转发集,再利用归一化的权值NADV(Normalized ADVance)评估候选转发集内节点成为下一跳节点的“适度性”,然后,将候选转发集划分不同的簇,使得簇内的节点均在彼此的通信范围内,再计算每个簇的期望权值EPA(Expected Packet Advanced),具有最大EPA的簇成为下一跳转发簇,最后,再利用定时器抑制冗余数据包数,并优化定时参数。仿真结果表明,提出的HPAR协议有效地提高数据包传输率、降低冗余数据包数。
水下传感网;选播路由;声通信;水压;数据包优先权值
近期,水下传感网络被广泛应用于潜艇跟踪、港口监控等水面应用[1-5]。与传统的网络不同,在水下传感网络中,大量水下移动传感节点部署于监测区域,形成SEA(Sensor Equipped Aquatic)群,SEA群随水流移动[6-7]。每个传感节点具有低带宽的声通信能力。此外,这些传感节点能够通过类似鱼膀胱装置和压力计设备,控制在水中的深度。声纳浮标漂浮在海洋表面,这些浮标具有声和无线射频通信能力。图1显示了SEA群结构。在SEA群结构中,每个传感节点监测水下活动,并实时地通过声通信多跳方式向任意可达的声纳浮标漂浮传输数据,再利用无线射频通信将这些数据传输到控制中心。本文重点在于:设计从移动传感节点至任意声纳浮标漂浮的有效选播(Anycast)路由协议[8-13],其中VARP[9]和HydroCast[13]具有代表性。VAPR路由利用序列号、跳数以及深度信息,选择下一跳的方向,并采用有方向机会转发避免路由空洞问题。而HydroCast属混合组播路由。HydroCast路由结合了地理位置路由和机会路由特性,依据节点深度调整,进而最大化地理位置路由的优势。
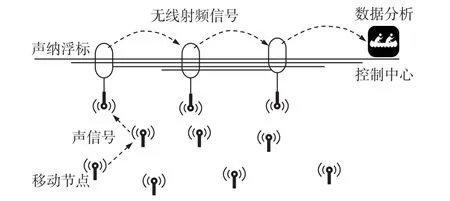
图1 SEA群结构
然而,传感节点的移动、带宽和能量的受限,给路由协议提出了挑战。水下声信道低带宽,并且传播时延比无线射频信道高了5个量级[14]。声传输比地面微波通信系统消耗了更多的能量。因此,由于有限带宽、高时延和有限能量,水下声通信系统易陷入拥塞,导致数据包碰撞[15-16]。
传统的先应式或反应式路由协议需通过系统泛洪进行路由发现和维护,这极大地提高了能量消耗和数据包碰撞。由于无需全局网络拓扑信息,3-D地理位置路由常用于在SEA群场景。然而,地理位置路由需要给移动节点进行定位,这无疑加大了开销。此外,地理位置路由易陷入局部最小问题。
本文针对地理位置路由,讨论向水面的的声纳浮标的选播路由,使数据包能够向浅(深度短)的传感节点传输。假定液压计能够准确地估计深度,误差小于1 m[17]。将节点的深度信息应用于地理位置的选播路由。文献[18]提出基于深度的贪婪路由DBR协议。DBR协议依据传感节点的深度信息,转发数据包,致使数据包贪婪地向更浅的邻居节点传输。
而不可靠的声信道和转发节点的选择是基于地理位置选播路由协议主要问题。为此,本文提出基于HPAR协议。HPAR协议考虑了信道质量,并定义了能够反映信道质量的数据包接收率,然后依据数据包接收率和节点深度信息定义节点权值,通过这些权值决策候选转发节点集,再将候选转发集划分簇,形成最优的转发节点簇。最后,利用定时器抑制冗余数据包,并优化定时器参数,进一步改善抑制冗余数据包的性能。仿真结果表明,提出的HPAR协议能够有效地降低端到端传输时延、抑制冗余数据包数、提高数据包传输率。与VAPR路由不同,HPAR路由协议旨在提高数据传输、收集性能,而VAPR路由主要是如何应对路由空洞问题。与经典的HydroCast路由相比,HPAR路由考虑了冗余数据包问题,并利用定时机制抑制冗余。
1 HPAR选播路由
HPAR路由属于选播、地理位置混合路由。在路由过程中,HPAR协议利用当前转发节点的位置、邻居节点位置以及已知信宿节点位置信息,并结合贪婪转发策略传输数据包。在HPAR协议的关键在于下一跳转发节点的选择。为了提高路由协议的性能,HPAR协议谨慎地选择转发节点。首先建立候选转发集,然后再从该集中选择部分节点作为下一跳转发节点。同时,为了控制冗余数据包数,通过优化定时器参数,采用非固定方式定义定时器。
1.1 转发节点簇
假定整个网络的节点集为N,每个节点的通信半径为rc,其中传感节点集表示为声纳浮标集表示为,即N=Nn⋃Ns。接下来,首先定义候选转发集。假定节点ni为当前数据包包携带节点,其需要传输数据包,在时刻t它的邻居节点集为Ni(t),它可到达的信宿节点集为Si(t)。首先考虑它离目的节点的距离信息。对于任意的邻居节点nk∈Ni(t),若满足式(1),则称归入候选转发集Γi:

式中:s*i表示离节点ni最近的信宿节点、sϑ表示数据包的目的节点。分别表示ni离的距离、nk离sϑ的距离,该距离可通过水压表征[18]。水压差越大,距离越长,反之,距离越短。针对候选转发集Γi,HPAR协议测量每个转发节点的权值,并进一步划分簇。首先引用归一化的权值NADV,评估Γi内节点成为下一跳转发节点的“适度性”。对于每个候选转发节点nc∈Γi,归一化的权值NADV()nc:

1.2 数据包传递概率
考虑文献[18]的水下声信道模型,估计数据包传递概率。对于相距为d的任意一对节点,信号频率为f,传输路径衰落,其中α(f)为吸收系数、k为扩频因子。因此,平均信噪比SNRΓ(d):

其中Ed、N0为常数,且分别表示单位比特的平均能量消耗、加性白高斯噪声功率密度。采用BPSK调制模式,相隔d的路径的比特误码概率为[19]:

因此,对于相距为d的任意一对节点,传输m比特的数据包传递概率表示为计算Γi集内的每一个节点的归一化的权值后,并按权值从高到低排序,形成集接下来,将集元素进一步划分,分成不同的簇ψj,确保簇内节点在彼此的监听范围内。
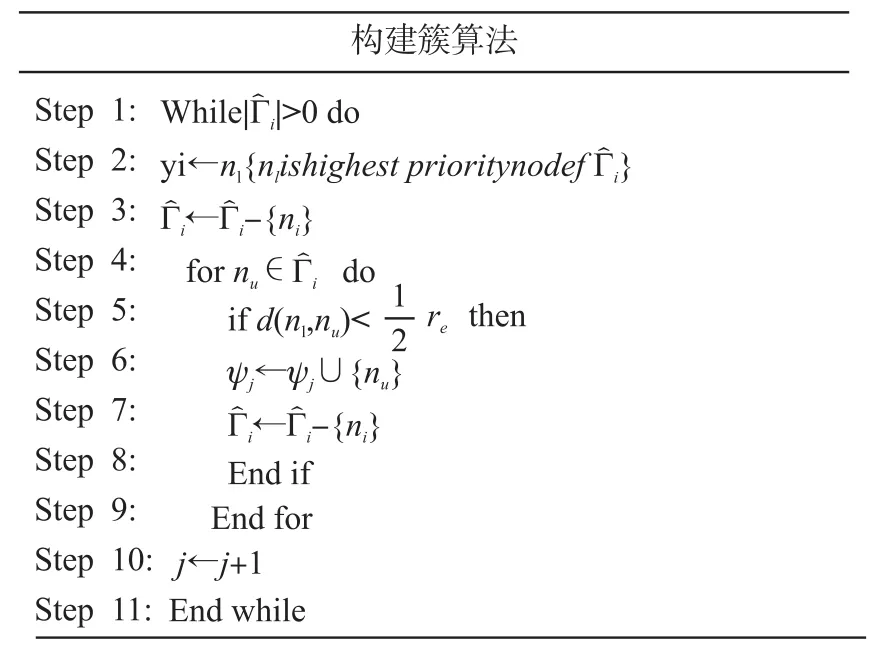
图2 构建簇算法伪代码
构建了簇后,依据文献[15],计算每个簇ψj集的期望数据包优先权值EPA,如式(5)所示。贪婪机会转发策略的目的就是构建ψj⊆Γi,致使EPA最大。最后,具有EPA最大值的簇最终成为下一跳转发节点簇。

1.3 定时器设置
构建了下一跳转发簇ψ后,当前节点ni将下一跳转发节点ψ的ID和位置信息嵌入数据包,并广播。当接收到该数据包,节点就从中提取信息,并验证自己是否属于ψ。如果是,再依据设置定时器。
在HPAR协议中,nk∈ψi接收了数据包,其设置的定时时间为Tk,当定时完毕后,就立即广播数据包。

式中:rmax表示节点的最大传输距离。α为参数。
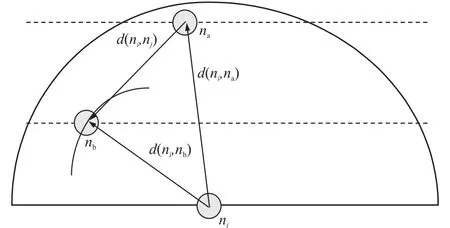
图3 设置定时器模型分析
为了更好地抑制冗余数据包,需慎重选择参数α。如图3所示,当前数据包携带节点ni,ψi内有两个节点na、nb。由于na离节点ni远,换而言之,它离水面上的声纳浮标更近,反之,nb离声纳浮标更远。因此,na的定时时间Ta比nb的定时时间Tb短,即Ta<Tb。假定利用ACK抑制冗余数据包,定时时间满足式(7):

式中:tij表示节点ni至节点nj的传播时延。tack表示传输ACK包的传输时延。
由于Ta<Tb,结合式(6)和(7),则参数α:

注意到式(8),分母d(ni,na)-d(ni,nb)对参数α有直接影响。若d(ni,na)-d(ni,nb)过小,参数α将非常大,这就会导致过长的时延。为此,在仿真中分析了参数α的影响,并采用自适应、非固定参数α的机制。
1.4 HPAR协议的数据包转发流程
当节点ni需要传输数据包,首先计算候选转发集Γi,再计算集内节点的数据包优先权值,再进行排序,构建有序的,然后再依据构建簇算法形成多个簇,并选出下一跳转发簇节点ni将簇信息嵌入数据包,再广播。接收了该数据包,节点首先判断自己是否是簇内节点,如果不是,就丢弃,否则,就是依据自己的权值,设置定时器,进行计时,并监听是否有其他节点转发该数据包。若有,则放弃竞争本次转发数据包的机会;反之,就待计时完毕,就立即转发数据包,具体流程如图4所示。
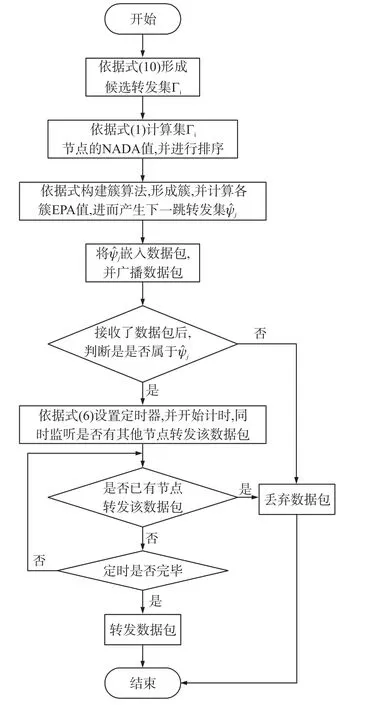
图4 HPAR协议数据包转发流程图
2 性能分析
利用MATLAB R2012b建立仿真平台[20]。考虑 1 000 m×1 000 m×1 000 m区域。传感节点|Nn|=150、200、250、300、350、400、450变化,相应地声纳浮标数|Ns|=45。此外,引用CSMA(Carriersense Multiple Access)媒介接入控制MAC(Medium Access Control)协议。在CSMA中,当信道为繁忙状态时,节点就进入等待退避时间,并再次感测载波。为了可靠,在路由层实施ARQ重传。一旦接收了数据包,节点就回复一个短的ACK包。若在规定时间内,源节点没有接收到ACK包,就重传数据包。每个数据包的最多重传次数为5。节点的传输半径rc=250 m、每次实验重复50次,取平均值作为最终数据。运行时间为3 600 s。当时间结束后,就通过程序停止运行。
为了更充分地分析路由性能,选择经典的DBR协议与HPAR协议进行比较。主要考查这些协议的平均端到端时延、数据包传递率以及冗余数据包数性能。其中平均端到端时延等于平均传输一个数据所需的时延,如式(10)所示:

式中:NP表示传输的数据包总数,Delay_P(i)表示传输第i个数据包的时延。
而数据包传递率等于成功传输的数据包数与总传输数据包率之比,其定义如式(11):

而冗余数据数表示每传输一个数据包时,所产生的多余数据包的数。同时,分析固定参数α和非固定参数α对路由协议的性能影响。仿真结果如图6~图8所示。
2.1 参数α
由1.3节分析可知,参数α对抑制冗余数据包的有直接的影响。为此,利用DBR协议,依据式(9)分析参数α的最小值。DBR协议是利用深度门限值h定义转发节点集,只要节点的深度比当前数据包携带节点低于不止一个门限值h,就可成为转发节点。DBR协议规定参数α是固定的。假定门限值h分别为0、100、200。实验结果如图5所示。
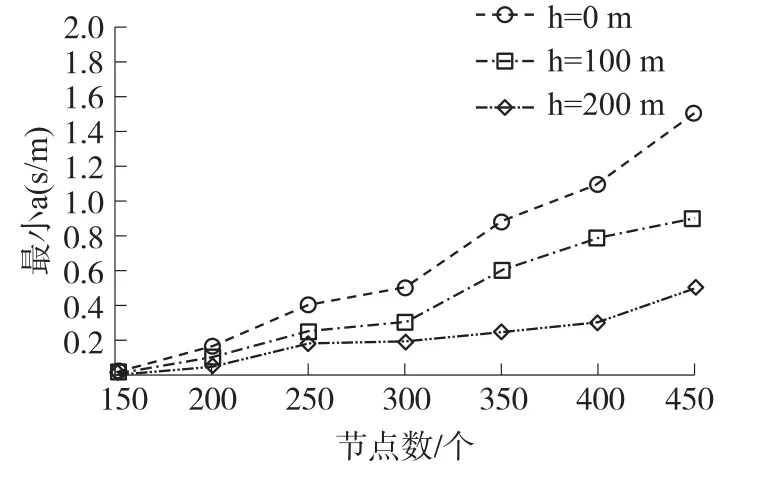
图5 最小α值
从图5可知,最小α值随传感节点数的增加而上升。原因在于节点数的增加,缩短了两节点间的距离,换而言之,两节点间的深度差更小,进而扩大了α值。在不同节点数的环境下,α值差异较大。与DBR协议不同,HPAR协议采用非固定的α值。
2.2 仿真数据分析
依据图5的仿真数据,制定α与节点数对应关系,如表1所示。利用图6中h=100m时的数据,即在不同的节点数时,取之相对应的α值。例如,当节点数为450h,α=0.84,而若节点数为400h,α= 0.72。在 2.2节的仿真过程中,当采用非固定αHPAR协议时,就依据表1决定α值。
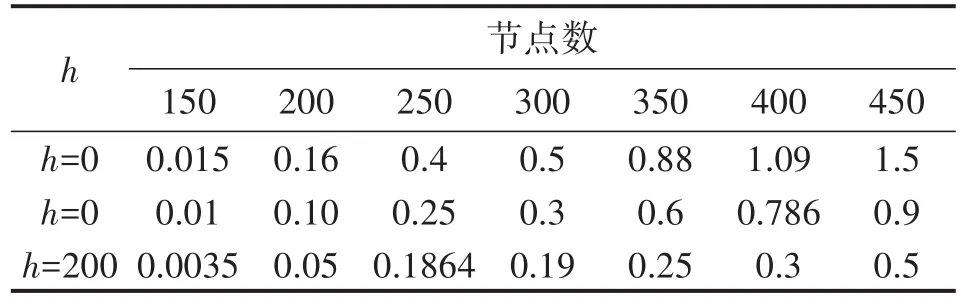
表1 α与节点数对应关系表
2.2.1 冗余数据包数
图6描述了平均每个数据包的冗余数据包数。将DBR采用固定α值的HPAR协议和非固定α值的HPAR协议进行相互比较。与DBR协议相比,HPAR协议的冗余数据包得到有效下降。原因在于:在DBR协议中,冗余数据包主要来源于多径数据包传递和未能有效地抑制数据包重传。而在HPAR协议中,通过融合数据包传递率和距离信息计算节点的权值,再依据权值定义转发节点集,而不是像DBR协议那样通过深度门限值定义转发节点集。此外,与固定α值的HPAR协议,非固定α值的HPAR协议能够将冗余数据包数下降约1个,这说明了非固定α值对抑制冗余数据包有积极的影响。
此外,从图6不难发现,HPAR协议的冗余数据包数并没有随节点数的增加而上升,在整个节点数的变化期间内,冗余数据包数较稳定。这主要有两点原因:首先,HPAR协议能够有效定义转发节点集,剔除多余节点转发数据包,其次HPAR协议通过设置定时器,进一步抑制冗余数据包。
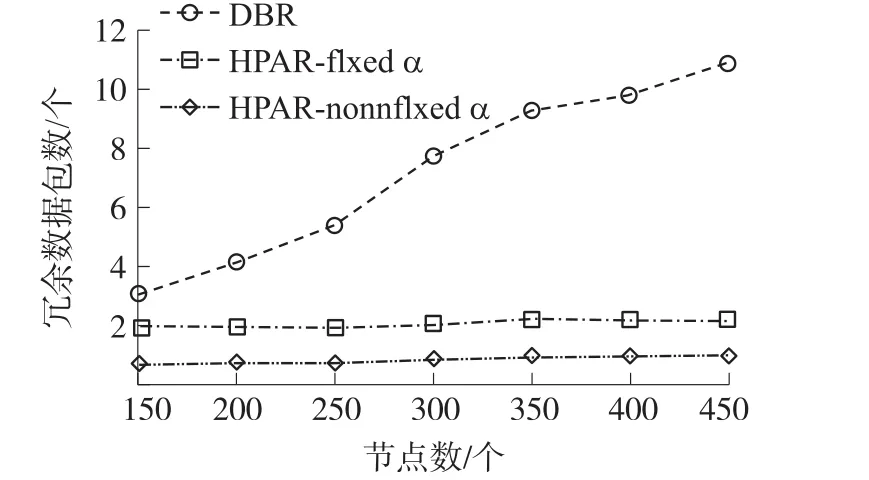
图6 冗余数据包数
2.2.2 数据包传递率
数据包传递率随节点数的变化情况如图7所示。从图7可知,数据包传递率随节点密度增加而上升,原因在于:密度增加,参与路由的节点数更多,节点间的通信链接更稳定,进而提高了数据包传递率。与DBR协议相比,提出的HPAR协议的数据包传递率得到有效提高。原因在于:HPAR协议在决定转发节点集时考虑信道质量和深度信息,并且通过自适应地调整参数α值,改善抑制冗余数据包的性能。从图7可知,非固定参数α的HPAR协议比固定参数α的HPAR协议的更能有效地提高数据包传递率,进一步说明非固定参数α可改善协议性能。
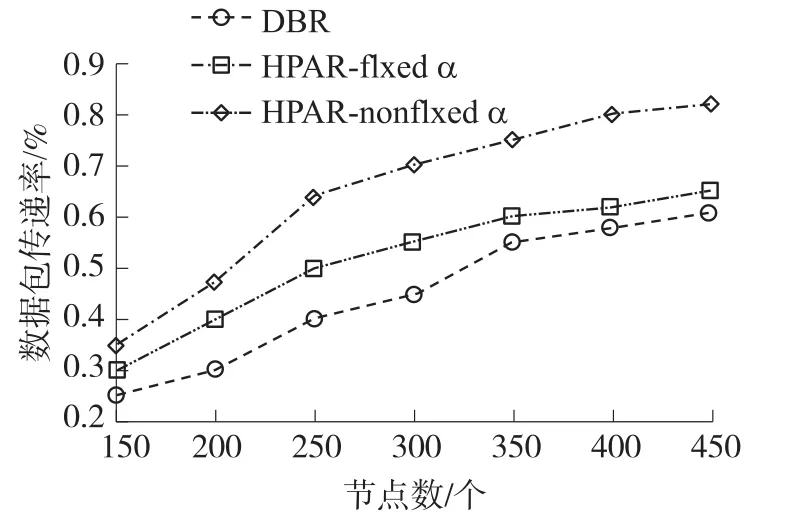
图7 数据包传递率
2.2.3 端到端传输时延
传输数据包的端到端时延随节点数变化曲线如图8所示。正如预期的,HPAR协议的平均时延高于DBR协议。原因在于DBR协议利用机会路由提高了数据包传输率,损害了平均时延的性能。而HPAR协议通过择优选择转发节点集,抑制了冗余数据包数,提高了数据包传递率,进而降低了端到端传输时延。此外,采用非固定α值能够有效地缩减时延,通过自适应地调整α值,以最优的方式设定定时器,减少了传输时延。
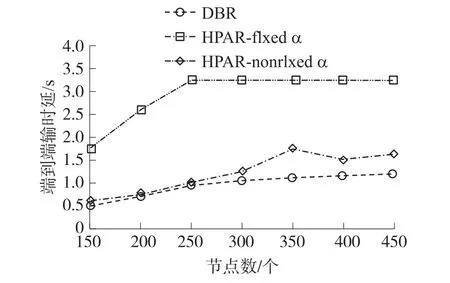
图8 端到端传输时延
从上述仿真数据可知,HPAR协议通过ADV定义转发节点集,择优选择下一跳转发节点,再设置定时器控制冗余数据包,进而提高了数据包的传输效率。与DBR协议相比,HPAR协议的优势在于抑制冗余数据包数、提高数据包传递率,也减少了端到端传输时延。
3 结束语
针对水下传感网络的路由问题,提出了基于水压的选播路由协议HPAR。当节点需要转发数据包时,HPAR协议先利用数据包优先权值ADV,从其邻居节点中选择一部分节点作为候选转发集,然后再计算候选转发集内所有节点的归一化权值NADV,并依据NADV,对候选转发集内节点进行排序,形成有序的候选转发集。随后,对有序的候选转发集划分不同的簇,并且确保每个簇内的节点在彼此的通信范围内。然后计算每个簇的期望权值EPA,并选择具有最大EPA的簇作为下一跳节点的转发集,最后,设置定时器,抑制冗余数据包。仿真结果表明,提出HPAR协议能够有效地降低冗余数据包数、提高了数据包传递率。
[1]Akyildiz I F,Pompili D,Melodia T.Underwater Acoustic Sensor Networks:Research Challenges[J].Ad Hoc Network.,2015,3(3):257-279.
[2]Kong J,Cui J H,Wu D,et al.Building Underwater Ad-Hoc Networks and Sensor Networks for Large Scale Real-Time Aquatic Applications[C]//Proc IEEE MILCOM,2015:1535-1541.
[3]王华东,王大羽.蝙蝠算法优化神经网络的无线传感网络数据融合[J].激光杂志,2015,36(4):64-69.
[4]王华东,王大羽.能量均衡的无线传感器网络均匀分簇策略[J].激光杂志,2015,36(6):158-162.
[5]王骥,林杰华,谢仕义.基于无线传感网络的环境监测系统[J].传感技术学报,2015,28(1):1732-740.
[6]Lee U,Kong J,Park J S,et al.Time-Critical Underwater Sensor Diffusion with no Proactive Exchanges and Negligible Reactive Floods[C]//Process.IEEE ISCC.2006:609-615.
[7]Zhou Z,Cui J H,Bagtzoglou A.Scalable Localization with Mobility Prediction for Underwater Sensor Networks[C]//Proc IEEE INFOCOM.2008:211-215.
[8]Lee U,Wang P,Noh Y.Pressure Routing for Underwater Sensor Networks[C]//Process.IEEEINFOCOM,2010:1-9.
[9]Noh Y,Lee U,Wang P,et al.VAPR:Void-Aware Pressure Routing for Underwater Sensor Networks[J].IEEE Transactions Mobile Computing,2013,12(5):895-908.
[10]Ayaz M,Baig I,Azween A,et al.A Survey on Routing Techniques in Underwater Wireless Sensor Networks[J].J Network Computing Application,2011,34(6):1908-1927.
[11]周凯,孟利民,华惊宇.基于Grover路由策略的无线传感网络剩余容量构造与研究[J].传感技术学报,2015,28(2):249-253.
[12]Xu J,Li K,Min G.Reliable and Energy-Efficient Multipath Communications in Underwater Sensor Networks[J].IEEE Transaction Parallel Distributed System,2012,23(7):1326-1335
[13]Yougtae N,Uichin L,Saewoom L.HydroCast:Pressure Routing for Underwater Sensor Networks[J].IEEE Transactions on Vehicular Technology,2016,65(1):333-348.
[14]Stojanovic M.On the Relationship between Capacity and Distance Inan Underwater Acoustic Communication Channel[C]//Process WUWNet.2006:41-47.
[15]Melodia T,Pompili D,Akyildiz I.Optimal Local Topology Knowledge for Energy Efficient Geographical Routing in Sensor Networks[C]//Process IEEE INFOCOM,2014:1705-1716.
[16]Vieira L F.Performance and Trade-Offs of Opportunistic Routing in Underwater Networks[C]//Process.IEEE Wireless Communication Network.Conference,2012:2911-2915.
[17]Jalving B.Depth Accuracy in Seabed Mapping with Underwater Vehicles[C]//Process.MTS/IEEE OCEANS Riding Crest 21st Century,Sep.1999:973-978.
[18]Yan H,Shi Z,Cui J H.DBR:Depth-Based Routing for Underwater Sensor Networks[C]//Process.IFIP Network,May 2008:72-86.
[19]Rappaport T.Wireless Communications:Principles and Practice[J].Wireless Communication Journal,2012,3(4):123-140.
[20]Zuba Z S M,Fagan M,Cui J.A Resilient Pressure Routing Scheme for Underwater Acoustic Networks[C]//Process 57th IEEE Global Telecommunication.Conference,2014:637-642.

刘文博(1982-),女,黑龙江省鹤岗市人,硕士研究生,西北民族大学电气工程学院讲师,主要研究领域为数字图像处理,通信和信号处理;

王 涛(1984-),男,陕西省宝鸡市人,硕士研究生,西北民族大学电气工程学院讲师,主要研究领域为电子设计自动化,物联网技术。
Hydraulic-Pressure-Based Anycast Routing for Underwater Sensor Networks*
LIU Wenbo*,WANG Tao
(College of Electrical Engineering,Northwest University for Nationalities,Lanzhou730124,China)
Due to the node mobility and limited resources(bandwidth and energy)of the mobile node of Underwater sensor networks,designing an efficient anycast routing protocol from a mobile sensor to any sonobuoy at sea level is key issue.Therefore Hydraulic-pressure-based anycast routing(HPAR)is proposed in this paper.HPAR makes routing decisions based on hydraulic-pressure,and optimal next forwarding node is selected by packet advancement.Whenever a sensor node needs to send a packet,HPAR uses the packet advancement(ADV)to determine the neighbors candidate set,then uses normalized advance(NADV)to measure the“goodness”of each nodes in neighbors candidate set,and ordered by NADV metric,finally form the ordered neighbors candidate set.NADV corresponds the optimal trade-off between the proximity and link cost to determine the priorities of the candidate nodes.In addition,the ordered neighbors candidate set is divided into several clusters,so that each node in clusters must hear each other.HPAR computes the Expected Packet Advanced(EPA),and the cluster with the highest EPA is selected to be the next-hop forwarder cluster.Finally,the redundant packet is suppressed by timer,and parameter of timer is optimal.Simulation results show that HPAR protocol has a good performance in terms of average numbers of redundant packets and packet delivery ratio.
underwater sensor networks;anycast routing;acoustic communication;hydraulic-pressure;packet advancement
TN914
A
1004-1699(2016)12-1899-06
��7230
10.3969/j.issn.1004-1699.2016.12.020
项目来源:中央高校基本科研业务费项目(31920150012,31920160073)
2016-04-12修改日期:2016-08-16
