全回转双桨船舶操纵性预报
2017-01-11吴兴亚高霄鹏
吴兴亚,高霄鹏
海军工程大学舰船工程系,湖北武汉430033
全回转双桨船舶操纵性预报
吴兴亚,高霄鹏
海军工程大学舰船工程系,湖北武汉430033
为实现对全回转桨船操纵性的预报,根据船舶分离型运动模型的建模方法,考虑全回转桨在水平面上周转的灵活性与受力的特殊性,着重分析双桨受力,建立适用于全回转对转桨船模的MMG操纵运动数学模型;模拟船模进行PMM运动,求得水动力导数并采用四阶龙格—库塔法对操纵性常微分方程进行求解;对某工程船在静水中的回转运动和Z形操纵运动进行数值仿真预报,并将预报结果与自航模操纵性试验结果进行对比。结果表明,两者吻合度较高,验证了针对全回转对转桨船模所建立的船舶运动数学模型的有效性,可为全回转桨船的操纵性预报提供一种较为可靠且行之有效的方法。
全回转桨;MMG数学模型;水动力导数;数值仿真;操纵性预报
0 引 言
船舶操纵性作为船舶性能研究的重点,始终是影响船舶安全航行的重要因素之一。目前,通常有3种基本方法预报船舶的操纵性,即基于特征参数的回归公式或数据库的方法、自由自航模试验方法以及基于数学模型的数值计算方法。沈定安和王化明等[1-2]利用数值计算方法,分别对波浪中的船舶以及双桨双舵船舶进行了操纵性预报;卢晓平、姚迪等[3-5]则对三体船的操纵特性进行了仿真计算研究。而全回转推进器作为一种相对新型的动力推进装置,可以绕轴线做360°的回转,在任何方向均可获得最大推力,它可以使船舶原地回转、横向移动、急速后退和在微速范围内进行操舵等特殊驾驶操作。目前,针对装备这一新型推进装置船舶的操纵性预报较少。王培生[6]、褚德英等[7-8]及刘百顺等[9]重点研究了全回转推进器的发展趋向并对其水动力性能做了研究预报;Kim等[10]和Abramowicz-gerigk[11]针对大型集装箱船和双桨双舵客轮,通过建立数学模型进行了数值模拟;康伟等[12]则对可回转双桨电力推进船舶的运动模型进行了研究。
本文将通过理论仿真预报与模型试验相结合的方法,针对某一民用全回转对转桨船模,通过数学建模、船桨受力分析、水动力导数求取以及方程求解等工作对其操纵性运动进行仿真预报,继而获得适用于全回转对转桨船舶的运动数学模型,为全回转桨船模的操纵性快速预报提供一种行之有效的方法,为今后综合评估装备有这一新型推进器船舶的操纵特性,掌握其操纵运动的规律,改进其操纵性能提供方法上的借鉴思路。
1 操纵运动预报模型
1.1 坐标系
如图1所示,本文采用2个右手直角坐标系建立MMG船舶操纵运动方程,一个固定在地球上,为固定坐标系O-x0y0z0,另一个固定在船体上,为运动坐标系G-xyz(G为坐标原点,与船舶质心重合)。在计算船舶水动力导数时,采用如图1所示的运动坐标系,在计算船舶仿真运动轨迹时,则采用固定坐标系。
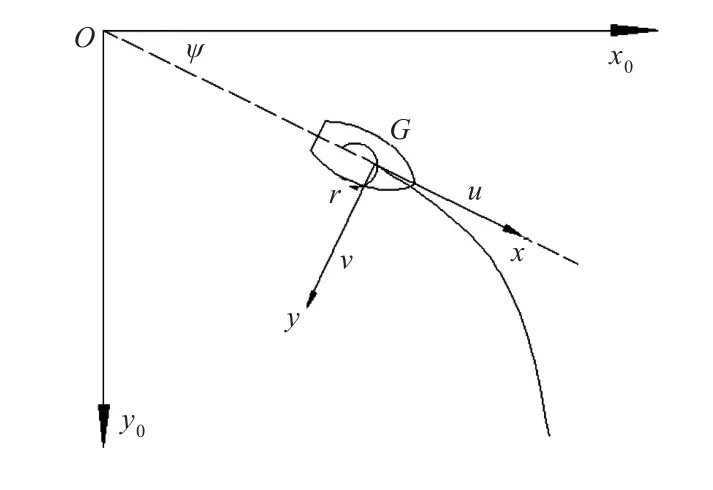
图1 船舶运动坐标系Fig.1 Motion coordinate systems of the ship
1.2 MMG数学模型
假定该船模航行在无限深广水域,船体视作刚体,自由液面作为静水面;仅考虑船舶在水平面内运动,忽略船舶横摇上的影响,根据MMG方程的研究方法[8],船舶在水平面上的MMG操纵运动方程为:
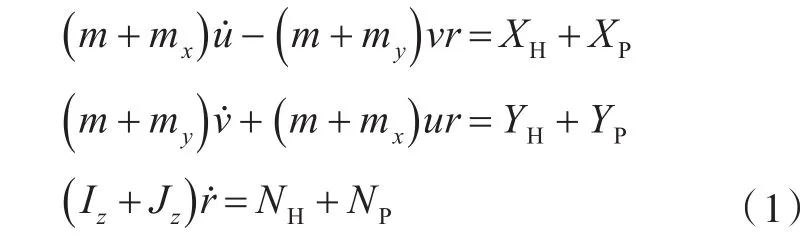
式中:m为船舶质量;mx和my分别为船舶在x轴和y轴方向上的附加质量;Iz和Jz分别为船体绕z轴的转动惯量和附加质量转动惯量;u和v分别为船舶的纵向速度和横向速度;r为船体绕z轴的转动角速度;u̇,v̇,ṙ分别为对纵向速度、横向速度和转动角速度求导所得加速度;XH,YH和NH分别为除推进器外的所有外力作用在船体上的纵向力、侧向力和艏摇力矩;XP,YP和NP分别为螺旋桨作用在船体上的推力、横移力和艏摇力矩。
1.3 附加质量
mx,my,Iz和Jz采用以下回归公式进行计算。

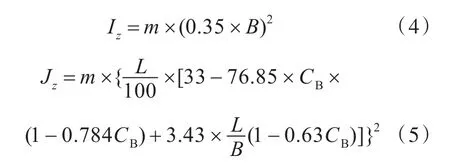
式中:CB为方形系数;d为设计吃水;B为型宽;L为设计水线长。
1.4 船体水动力
当船舶的运动参数为微小量时,常常略去高阶项,故作用在船体上的力和力矩可简化为:
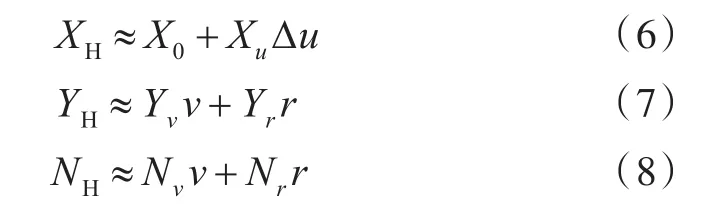
式中:X0为直航阻力;Xu,Yv,Yr,Nv,Nr为相应水动力系数。
1.5 全回转桨水动力
本文的研究对象为全回转对转桨双桨船舶,其结构图如图2所示。在进行桨水动力计算时,分别用L和R表示左、右螺旋桨,螺旋桨模型如图3所示,主要几何参数如表1所示。左右螺旋桨对称分布,与船舶质心G的距离为xG,与船舶纵向中心线的距离为y。
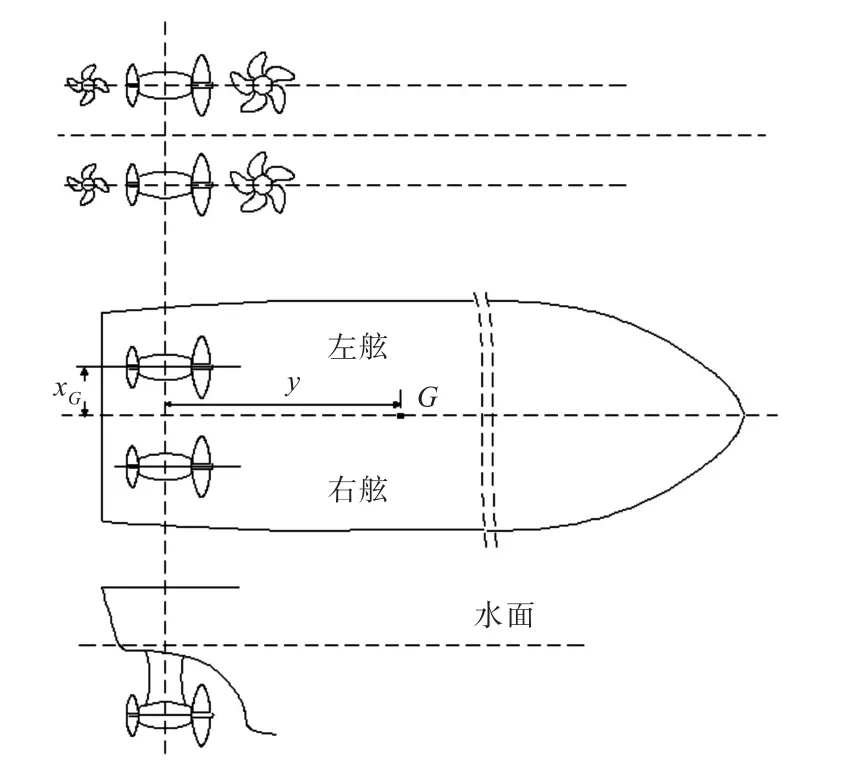
图2 全回转双桨船示意图Fig.2 Schematic of full-revolving propeller ship
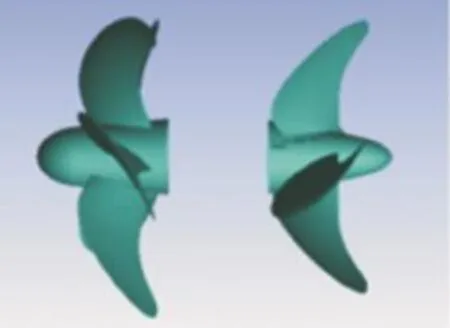
图3 桨模型Fig.3 Model of propellers
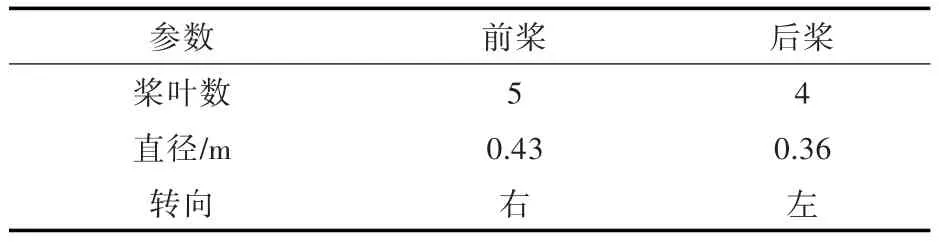
表1 螺旋桨主要几何参数Table 1 The main geometric parameters of propellers
以左桨为例,单桨在静水中产生的轴向推力为TL,当螺旋桨在水平方向上产生一个回转角φ时,螺旋桨推力在运动坐标系x轴、y轴产生的投影分量分别为XL,YL,对船体产生的转船力矩为NL。各力和力矩公式如下:
其中:k为左(右)桨推力系数;ρ为水密度;n为螺旋桨转速;D1为前桨的桨盘面直径;t为左(右)桨在x轴方向上的常规推力减额系数;p为左(右)桨对船舶y轴方向侧向力的影响系数;q为左(右)桨对船舶z轴方向艏摇力矩的影响系数;φ为左(右)桨在水平方向上旋转的角度。
同时,对于此类全回转双桨式吊舱桨,前桨与后桨、桨与吊舱以及装配在船后时与船之间存在相互干扰,使得其水动力性能变得尤为复杂。在确定左右桨推力系数时,在敞水下选取不同偏转攻角,分别为0°,±15°和±30°,取不同进速系数,得出不同攻角、不同进速系数J下前后桨的推力系数,本文计算时进速系数公式为

式中,Vm为螺旋桨进速,由该公式确定的进速系数可得到本文所用螺旋桨的推力系数。
由于左右螺旋桨结构、材质相同,对称安装,正常工作时转速始终保持相同且旋转角度在水平面内始终为同一方向,所以当两桨同时工作时,对船体产生的水动力为:
2 水动力导数计算
在求解针对本船模的MMG操纵运动方程中的水动力导数时,基于STAR-CCM+软件平台,采用RANS方程和流体体积(Volume of Fluid,VOF)算法,针对某一工程船船模(图4)进行PMM运动数值仿真模拟,考虑自由液面的兴波与航行过程中船模姿态的变化,建立了船模按斜航运动、纯横荡运动以及不同振荡模式下艏摇运动3种工况下的操纵性水动力导数求解方法,并将仿真求解结果与利用回归公式的求解结果相印证,得出全回转对转桨船模的水动力导数,其求解结果见表2。
3 操纵性仿真预报
3.1 仿真船模要素
数值仿真计算船模为一民用工程船模,船模无量纲化主要参数如表3所示。
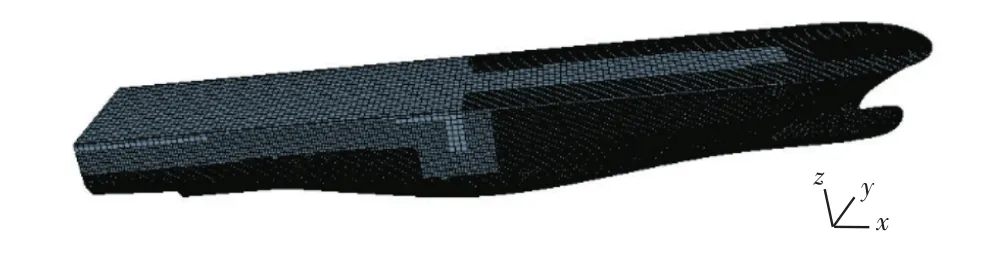
图4 水动力导数计算船模及网格划分Fig.4 Calculation model of hydrodynamic derivatives and meshing

表2 水动力导数计算结果Table 2 The results of hydrodynamic derivatives
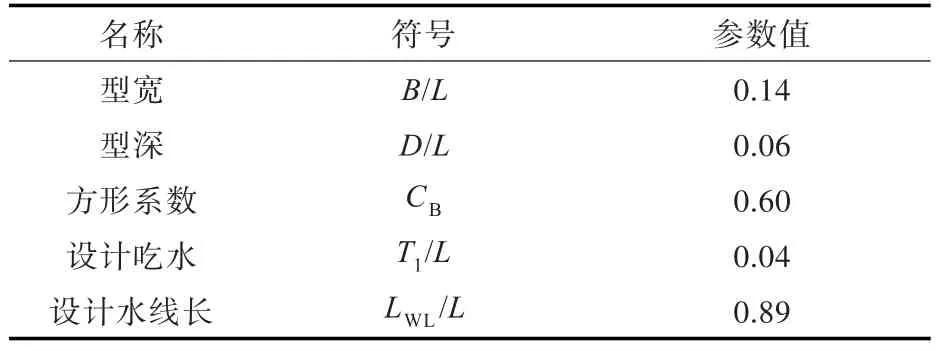
表3 船模无量纲化主要参数Table 3 Main dimensionless parameters of the model
3.2 仿真实验
针对已经建立起来的适合全回转双桨船模的MMG操纵运动方程,水动力导数借助STAR-CCM+软件平台模拟船舶斜航、纯横荡和纯艏摇3种运动工况计算求出,继而通过求解时域微分方程即可实现对船舶操纵运动动态特征的计算机模拟仿真,得出船模特定的运动轨迹以及时域特性。本文借助MATLAB计算软件平台,在不考虑船舶横摇、纵倾对船模的影响下,采用四阶龙格—库塔法对操纵性常微分方程进行求解,得到特定航速不同舵角下目标船模的回转运动轨迹以及做回转运动的定常回转直径等特征参数。
在船模航速4.3 kn下,数值仿真计算了±5°,±10°,±15°,±20°,±25°,±30°和±35°操舵角下的回转运动以及±10°和±20°时的Z形操纵试验,左右螺旋桨在计算过程中保持转速不变且做完全相同的运动。
3.3 数值仿真预报与自航模试验结果
数值仿真预报与自航模试验结果如图5~图8所示。定常回转和Z形操纵的预报结果如表4~表5所示。
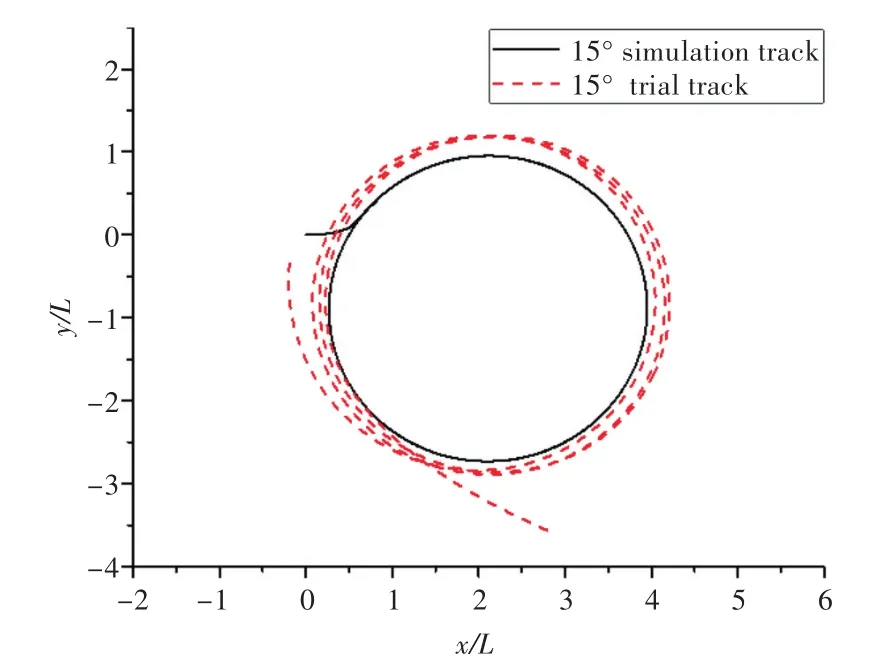
图5 4.3 kn,15°舵角回转运动时的无因次轨迹仿真和试验曲线Fig.5 The dimensionless simulation and trial curves of rotating motion in 4.3 kn,15°rudder angle
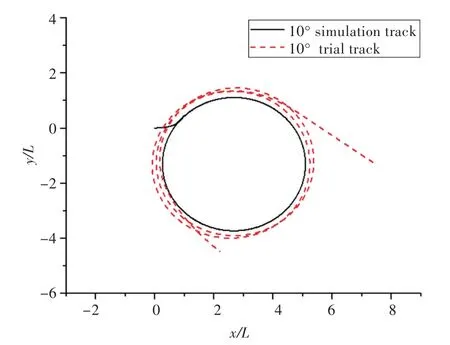
图6 4.3 kn,10°舵角回转运动时的无因次轨迹仿真和试验曲线Fig.6 The dimensionless simulation and trial curves of rotating motion in 4.3 kn,10°rudder angle
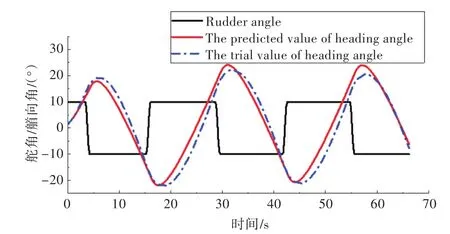
图7 4.3 kn,10°/10°Z形操纵试验曲线Fig.7 The trial curve of zigzag test in 4.3 kn,10°/10°rudder angle
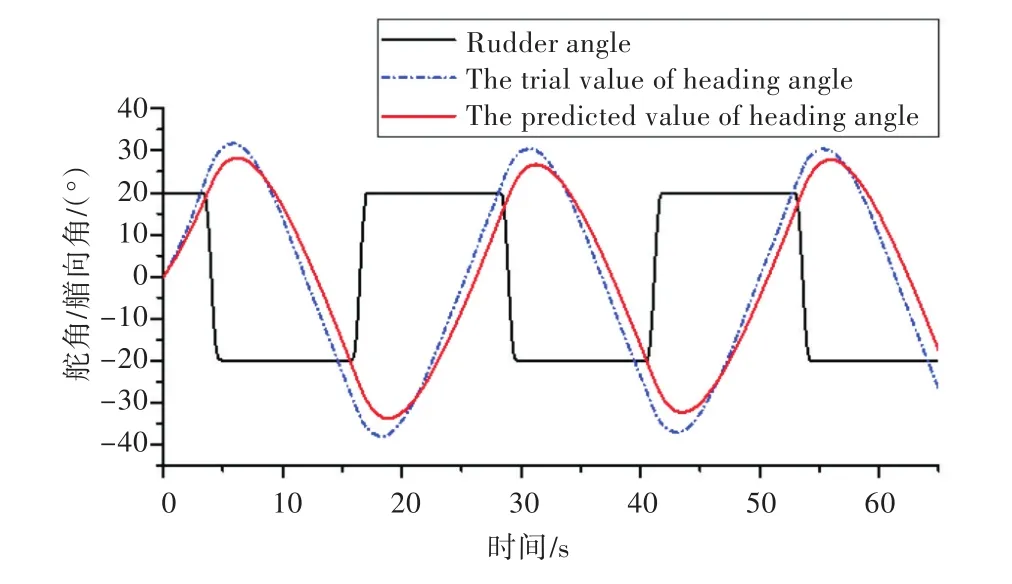
图8 4.3 kn,20°/20°Z形操纵试验曲线Fig.8 The trial curve of zigzag test in 4.3 kn,20°/20°rudder angle

表4 航速4.3 kn下定常回转预报结果Table 4 The prediction results of constant turning at 4.3 kn

表5 航速4.3 kn下Z形操纵预报结果Table 5 The prediction results of zigzag test at 4.3 kn
3.4 结果分析
以全回转双桨船模为计算模型,数值模拟船模的PMM运动,基于3种不同运动工况求得船舶操纵的各线性水动力导数,并与通过回归方程的计算结果进行比对,验证了数值仿真的有效性。
在船模的回转运动仿真预报中,特定航速不同舵角下的各回转运动轨迹、定常回转直径以及回转战术直径等操纵性参数与自航模试验数据结果吻合较好,均在船舶操纵性标准规定的波动范围内。
在Z形操纵试验仿真预报中,超越角、初转期以及表征船舶操纵性能的各个指数,其仿真预报值与模型试验结果相吻合,符合舰船通用规范的要求。
考虑到全回转桨受力的复杂性以及初次探索该型船操纵性预报方法,本文针对全回转桨船舶建立的数学模型仅考虑了线性部分,在接下来的工作中将考虑进一步完善。
4 结 论
本文围绕全回转对转双桨船舶的操纵性展开仿真计算研究,在建立针对此船型的数学模型、数值计算出该目标船型的水动力导数的基础之上,对全回转桨船舶的回转运动轨迹、Z形操纵试验轨迹进行了数值仿真,根据仿真预报结果与船舶湖试试验数据的对比分析,得出如下结论:
1)本文提出了一种针对全回转桨船舶的操纵性预报方法,并将仿真预报的回转试验、Z形操纵结果与自航模试验结果进行了对比,验证了本文针对全回转对转双桨建立的船舶运动数学模型的有效性与适用性;
2)通过将数值仿真计算与回归公式结果进行比对,验证了本文采用的水动力导数计算方法与计算结果的准确性,为求解所建立的船舶运动数学模型奠定了基础;
3)本文对于全回转对转桨船舶操纵性的准确预报具有一定的工程实用价值,可为今后全回转桨船舶的操纵性快速预报提供技术支撑与依据。
[1] 沈定安,马向能,孙芦忠,等.波浪中船舶操纵性预报[J].船舶力学,2000,4(4):15-27. SHEN D A,MA X N,SUN L Z,et al.The prediction on ship manoeuvring performance in wave[J].Journal of Ship Mechanics,2000,4(4):15-27(in Chinese).
[2] 王化明,邹早建.双桨双舵船舶操纵性预报研究[J].武汉理工大学学报(交通科学与工程版),2006,30(1):124-127. WANG H M,ZOU Z J.Manoeuvrability prediction for a ship with twin propellers and twin rudders[J].Jour⁃nal of Wuhan University of Technology(Transportation Science and Engineering),2006,30(1):124-127(in Chinese).
[3] 卢晓平,姚迪,王中.三体船操纵特性计算机数值仿真[J].中国舰船研究,2010,5(3):1-7. LU X P,YAO D,WANG Z.Numerical simulation of maneuverability characteristics of trimaran[J].Chi⁃nese Journal of Ship Research,2010,5(3):1-7(in Chinese).
[4] 卢晓平,姚迪,王波.三体船操纵性计算与特性分析[J].海军工程大学学报,2009,21(1):47-53. LU X P,YAO D,WANG B.Trimaran maneuverability prediction and its feature analysis[J].Journal of Naval University of Engineering,2009,21(1):47-53(in Chinese).
[5] 姚迪,邹艳忠,李光磊.三体船操纵特性仿真研究[J].船电技术,2013,33(9):48-51. YAO D,ZOU Y Z,LI G L.Simulation and research on maneuverability for trimaran[J].Marine Electric& Electronic Technology,2013,33(9):48-51(in Chi⁃nese).
[6] 王培生.全回转推进器的水动力性能研究[D].哈尔滨:哈尔滨工程大学,2008.
WANG P S.Research on hydrodynamic performances of full-revolving propulsors[D].Harbin:Harbin Engi⁃neering University,2008(in Chinese).
[7] 褚德英,张葆华,王莹,等.全回转吊舱推进器水动力性能试验研究[J].船舶工程,2013,35(增刊2):58-61. CHU D Y,ZHANG B H,WANG Y,et al.Experimen⁃tal research on hydrodynamic performance of azimuth podded thruster[J].Ship Engineering,2013,35(Supp 2):58-61(in Chinese).
[8] 王文涛,褚德英,张葆华,等.全回转吊舱推进器性能预报-仿真与试验研究[J].造船技术,2012(2):26-29. WANG W T,CHU D Y,ZHANG B H,et al.Study on the performance prediction of the azimuth podded thruster-simulation and experiments[J].Marine Tech⁃nology,2012(2):26-29(in Chinese).
[9] 刘百顺,徐玉如.可回转桨的水动力模型与操纵性能[J].海洋工程,1999,17(1):28-34. LIU B S,XU Y R.The hydrodynamic model and ma⁃neuverability of the rotatable propeller[J].The Ocean Engineering,1999,17(1):28-34(in Chinese).
[10] KIM Y G,KIM S Y,KIM H T,et al.Prediction of the maneuverability of a large container ship with twin propellers and twin rudders[J].Journal of Ma⁃rine Science and Technology,2007,12(3):130-138.
[11] ABRAMOWICZ-GERIGK T.Experimental study on the hydrodynamic forces induced by a twin-propeller ferry during berthing[J].Ocean Engineering,2008,35(3/4):323-332.
[12] 康伟,褚建新,黄辉,等.可回转双桨电力推进船舶运动模型的研究[J].中国造船,2012,53(1):107-116. KANG W,CHU J X,HUANG H,et al.Study on pro⁃pulsion and rotary motion model of the rotatable twin-propeller electric propulsion ship[J].Shipbuild⁃ing of China,2012,53(1):107-116(in Chinese).
Maneuverability prediction for a ship with full-revolving twin propellers
WU Xingya,GAO Xiaopeng
Department of Naval Architecture Engineering,Naval University of Engineering,Wuhan 430033,China
To predict the maneuverability of full-revolving propeller ships,this paper analyzes the propeller force and establishes MMG equations for controlling motion mathematical models that are suited to the full-revolving propeller model,in accordance with the modeling method of the separating ship motion model and taking into account the special nature of the force and flexibility of a full rotation in the horizontal plane of a full-revolving propeller.Secondly,hydrodynamic force derivatives for the ship model are obtained by simulating the model's PMM movement,and the controlling Ordinary Differential Equation (ODE)is solved using the four-stage Rung-Kuta method.Finally,the numerical simulation of a certain ship's rotating motion and its zigzag test in still water is obtained,and the prediction results are compared with that of a self-running model.It is found that the simulation results agree well with the trial results,and the effectiveness of the ship motion model for the full-revolving propeller model is validated.In brief,this paper provides a reliable and effective method of predicting the maneuverability of full-revolving propeller ships.
full-revolving propeller;MMG mathematical model;hydrodynamic derivatives;numerical simulation;maneuverability prediction
U661.33
A
10.3969/j.issn.1673-3185.2017.01.005
2016-06-06
2016-12-28 15:59
吴兴亚(通信作者),男,1992年生,硕士生。研究方向:舰船流体动力性能。E-mail:282294867@qq.com高霄鹏,女,1971年生,博士,副教授。研究方向:舰船流体动力性能
http://www.cnki.net/kcms/detail/42.1755.TJ.20161228.1559.032.html期刊网址:www.ship-research.com
吴兴亚,高霄鹏.全回转双桨船舶操纵性预报[J].中国舰船研究,2017,12(1):27-31,62. WU X Y,GAO X P.Maneuverability prediction for a ship with full-revolving twin propellers[J].Chinese Journal of Ship Research,2017,12(1):27-31,62.
